考虑减速伞二次充气过程的星际飞船返回轨道研究
2022-06-27 09:52朱如意曹晓瑞刘敏华
导弹与航天运载技术 2022年3期
王 征,朱如意,曹晓瑞,刘敏华
(中国运载火箭技术研究院,北京,100076)
0 引 言
在航天飞机退役后,飞船因其研制成本低、可靠性高等特点,已成为当前人类进出太空的最常用手段。美国为摆脱对俄罗斯联盟号飞船的依赖,由NASA 出资、波音公司与SpaceX 公司承担研制,分别独立研发出星际飞船与载人龙飞船用于美国未来的载人航天任务。星际飞船于2019 年12 月完成无人首飞测试,由于计时器软件初始化故障未实现同国际空间站交会对接就应急返回着陆于白沙靶场。星际飞船作为新一代可重复使用飞船,不仅具备载人进出空间、货物运输、在轨生命保障能力,还具备可重复使用、大范围机动变轨、离轨再入与伞降垂直着陆能力。离轨返回与伞降垂直着陆能力,则是保障宇航员安全返回地面、飞船结构能承受住接地冲击过载以及保证飞船再次执行载人进出太空任务的前提,是星际飞船首次在轨飞行测试任务(OFT-1)着重验证的核心关键技术。
本文综述了星际飞船首飞试验任务情况,考虑减速伞二次充气过程建立了飞船返回运动模型,设计算例、利用数学仿真验证了返回轨道计算方法与模型正确性。
1 星际飞船任务情况
1.1 星际飞船首飞试验情况综述
2019 年12 月20 日,波音公司研制的星际飞船(CST-100 Starliner)搭载宇宙神5 火箭于卡纳维拉尔角空军基地SLC-41 工位发射入轨,执行飞船首飞试验任务。火箭上升段飞行正常、船箭分离正常,但飞船入轨后由于计时器软件错误,使得飞船未能按正常飞行程序执行轨道插入机动动作,在地面应急补救条件下才使得飞船进入一条偏离预定轨道的稳定运行轨道。由于飞船未能切入预定轨道且应急机动消耗燃料过多,导致飞船无法实现同国际空间站的交会对接操作以及270 kg 物资的给养输送任务,被迫于12 月22 日提前应急返回并着陆于新墨西哥州白沙靶场。
星际飞船首飞试验包括发射上升段、在轨运行段与返回再入段3 个阶段。飞船发射上升段主要动作包括:搭载火箭起飞、助推器分离、火箭一级发动机关机、火箭一二级分离、保护罩分离、半人马座点火、气动裙分离、半人马座关机、船箭分离、排气下落、发射任务结束与残骸入海,见图1 所示。船箭分离后,飞船将进入远地点为181 km、近地点为72 km、倾角为51.6 °的亚轨道。经过推算,船箭分离点高度约为164 km、速度为7794 m/s、航迹倾角为0.4167 °。
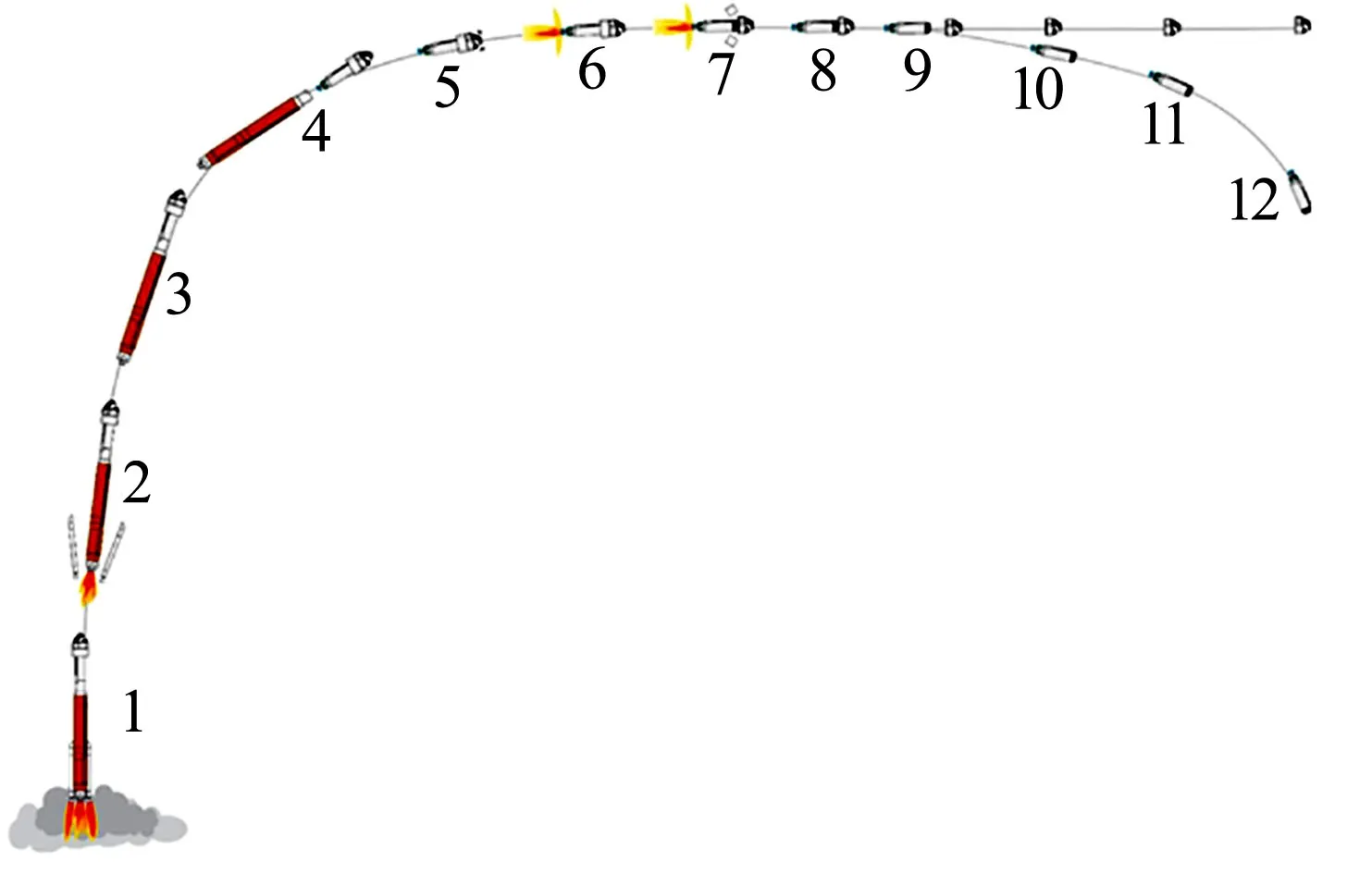
图1 上升段飞行剖面Fig.1 Ascent Flight Profile
星际飞船分离后,按预定程序要进行目标轨道插入机动、调相机动、高度控制与轨道面修正、轨道面精修、末端接近、绕飞机动、进入交会走廊、对接操作。在轨段任务剖面如图2 所示。由于计时器错误,飞船未能正确执行目标轨道插入机动,变轨失败后飞船进入近地点187 km、远地点222 km 轨道。在多次地面应急补救下,最终进入近地点251 km、远地点266 km 的稳定轨道,并在此轨道上开展在轨测试。

图2 在轨段飞行剖面Fig.2 On-orbit Flight Profile
星际飞船返回过程主要进行了离轨制动、惯性滑行、分离服务舱、再入大气、开引导伞、分离上挡热板、开减速伞、展开扭转臂、分离下挡热板、着陆气囊充气、接地等动作。飞船返回后伞降过程飞行剖面见图3 所示。

图3 伞降着陆段飞行剖面Fig.3 Parachutes’ Descending Flight Profile
根据公布消息及轨道分析,飞船在世界时2019 年12 月22 日12:23 开始进行离轨制动,制动起始大地高度为260.2 km、速度7457 m/s;制动50 s 后飞船速度降低为149.8 m/s;滑行至256.2 km 高度处,飞船分离服务舱;再入后飞船气动加热最高温度约1650 ℃;在9 km 高度飞船引导伞开伞;在2.4 km 高度处飞船3 个减速伞开伞;开伞1 min 后,飞船分离下挡热板;在900 km 高度处,对着陆气囊进行充气;最后,飞船以8.5 m/s 的接地速度着陆于白沙靶场。根据NASA 公布飞船返回视频记录绘制星际飞船伞降过程如图4所示。

图4 星际飞船伞降过程示意Fig.4 Starliner’s Descending with Parachutes
1.2 飞船返回飞行程序
参考波音公司星际飞船返回情况,本文研究中简化飞船返回阶段飞行程序如图5 所示。
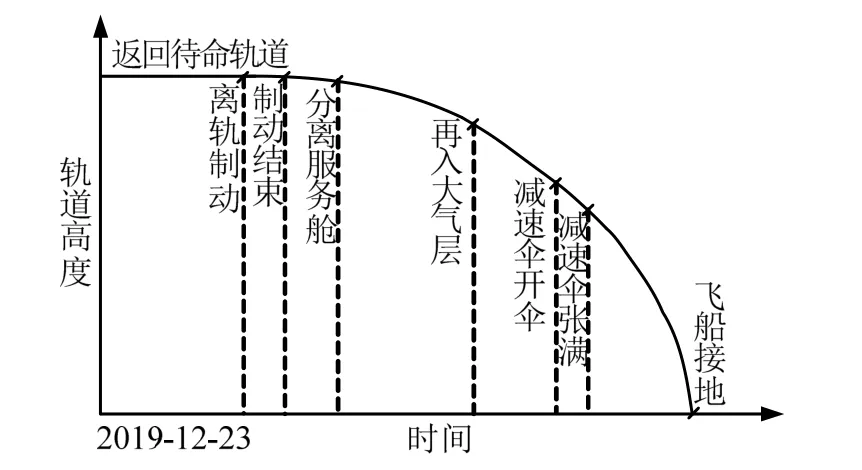
图5 飞船返回再入程序Fig.5 Returning Procedure of Spaceship
返回过程中,飞船将进行离轨制动、分离服务舱、再入大气、减速伞开伞、着陆等动作。
2 计算模型
2.1 离轨段轨道模型
根据轨道动力学理论可知,飞船在轨运动关系为
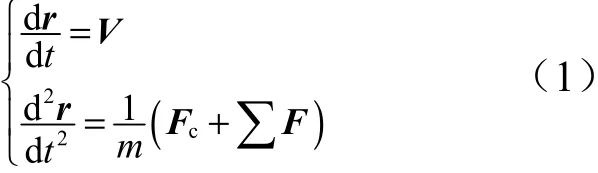
式中为地心距;为时间;为惯性速度;为飞船质量;发动机控制力;为摄动力合矢量。
从式(1)可见,飞船将在离轨发动机推力、地球引力及大气摄动力等作用下完成离轨制动并滑行至大气层内。离轨过程发动机推力沿轨道坐标系速度反向,推力大小为,则发动机推力如下:

离轨制动燃料消耗计算如下:

式中为燃料消耗量;为初始质量;为发动机比冲;Δ为速度增量。
地球引力可描述为中心引力与摄动引力加速度之和,引力势函数描述如下:

式中, ,为球坐标,分别为地心距及地心经度、纬度;为地球引力参数;为地心经度; C, S为球谐系数;P (),P ()分别为阶次及阶勒让德多项式,通过递推计算得到。
飞船返回前运行于LEO 轨道,受高层大气作用明显,气动力计算公式如下:
式中,,分别为阻力、升力、侧向力;,,分别为阻力系数、升力系数、侧向力系数;为大气密度;为大地高度;为动压;为飞船迎风面积;为飞行器对高层大气的空速,满足如下关系:

式中为惯性速度;为高层风速;为地速。
2.2 再入段轨道模型
考虑飞船再入返回过程中,气动力、减速伞伞绳拉力逐渐占主导作用,在极坐标系下以,,,,,为轨道根数建立再入轨道计算模型如下:
式中, g分别为引力加速度在地心距矢量与地心旋转角速度矢量方向的分离大小,;为地球角速度;,分别为升力、时间;为地心距变化率; ,为航迹倾角与航迹偏角;为滚转角。飞船升力与阻力计算如下:
式中为减速伞伞绳拉力;为非球形引力摄动二阶项系数。
2.3 减速伞二次充气模型
飞船在着陆前减速伞阻力将成为飞船着陆减速的主导因素,直接决定了飞船着陆平衡速度与安全性。伞绳拉力沿速度矢量方向,拉力大小与伞衣张开状态相关,计算模型如下:

式中为减速伞阻力特征;为开伞动载系数。
减速伞由于伞衣面积较大,开伞过程分为3 段:
a)第1 阶段为自减速伞充气开始至伞衣呈灯泡状阶段。伞衣阻力特征按线性处理,如下:

式中为第1 次充气行程系数;为减速伞充气距离。此时,满足 0≤≤,为第1 次充气行程,计算如下:式中为减速伞收口状的阻力特征;为减速伞张满的阻力特征;为减速伞展开直径。

以表示伞表面积,则减速伞展开直径计算如下:

b)第2 阶段为减速伞伞衣呈“灯泡”状阶段。伞衣阻力特征为一定值,计算如下:

此时,减速伞充气距离满足<≤+。为减速伞在灯泡状的充气行程,按伞降距离计算。
c)第3 阶段为减速伞解除收口后阶段。伞衣阻力特征为二次函数:

此时,减速伞充气距离满足+<≤++。为第2 次充气行程系数,为减速伞第2 次充气行程:

式中为减速伞的充满行程,且有=,其中,为行程系数。
3 飞船返回轨道仿真分析
3.1 主要计算条件
以飞船返回着陆并利用3 个减速伞在2.4 km 高度开伞减速着陆为例进行仿真分析及验证。飞船返回起始时间为世界时2019-12-22 12:23:47。仿真中所涉及的主要参数如表1 所示。

表1 主要仿真计算条件Tab.1 Main Calculation Condition
3.2 仿真结果分析
通过仿真可得飞船返回轨道星下点变化如图6 所示。

图6 飞船返回轨道星下点轨迹Fig.6 Return Trajetory of the Spaceship
飞船自澳洲东部海域开始制动离轨、沿过渡轨道滑行至赤道附近开始再入大气,并最终伞降着陆于美国西部白沙靶场。
3.2.1 离轨段仿真结果
飞船离轨段轨道按开环控制方式计算,通过仿真可得飞船轨道参数变化如图7、图8 所示。
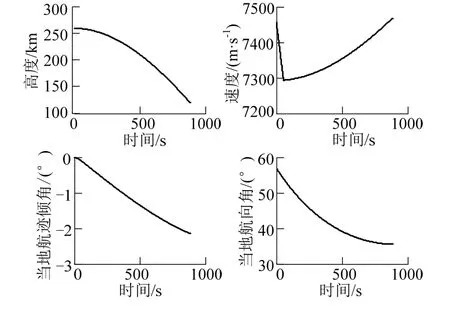
图7 离轨段轨道参数变化Fig.7 Variation of Deorbit Parameters

图8 离轨段燃料消耗情况Fig.8 Variation of Deorbit Fuel Consumption
由图8 可见,飞行器自260.2 km 高度离轨运行至120 km 高度处共运行885.9 s;离轨制动55 s 消耗燃料推进剂480 kg、速度增量为165.1 m/s,在机动后133 s分离服务舱后飞船剩余质量为2500 kg。通过计算可得,飞船离轨段同再入段交班点地速为7467.629 m/s、当地航迹倾角为-2.144 °、当地航向角为35.547 °,再入点大地经纬度为[-134.387°,-1.376°]。
3.2.2 再入段仿真结果
飞船再入段初始条件即离轨过渡段末端的交班点条件,终端条件即着陆位于美国白沙靶场的目标点条件。通过仿真可得飞船再入高度与速度变化如图9 所示。飞船自120 km 高度离轨至着陆共运行2387.8 s,开伞高度参照星际飞船公布信息选择在离地2400 m位置处;设计着陆速度为5.8 m/s,较星际飞船返回时8.5 m/s 的接地速度更安全。需要注意的是,这与飞船总体参数、减速伞特征参数相关,本文研究中部分飞船总体参数及减速伞特征参数为根据星际飞船返回试验信息及轨道机动故障分析反推的测算值,不影响返回轨道设计方法的仿真验证。

图9 再入位置与速度变化Fig.9 Variation of Reentry Position and Velosity
仿真可得飞船再入航迹倾角与航向角变化如图10所示。飞船再入的起始航迹倾角为-2.144 °,运行至1998 s 飞船开伞后航迹倾角开始由-42.9 °逐渐过渡至-88.2 °,基本等效于垂直降落情况,与公布的星际飞船返回着陆前视频录像中的实际飞行情况相符;航向角变化为35.5~272.8 °,最终飞船着陆于美国西部白沙靶场内。

图10 再入航迹角变化Fig.10 Variation of Reentry Flight Path Angle
4 结束语
本文根据美国波音公司星际飞船首飞背景,完成了考虑减速伞二次充气过程的飞船返回轨道设计方法研究。首先,根据美方公布信息梳理了星际飞船首飞试验情况,结合轨道分析需求简化了飞船返回程序;其次,结合飞行剖面特点,考虑非球形引力摄动、大气摄动建立了飞船离轨轨道模型,考虑减速伞二次充气张满建立了飞船再入运动模型;最后,根据星际飞船返回公布信息及测算数据,设计算例、通过数学仿真验证了返回轨道设计方法的有效性。