垂直起降运载火箭多执行装置系统优化研究
2022-06-27 09:49马红鹏焦宗夏赵守军
导弹与航天运载技术 2022年3期
马红鹏,吴 帅,焦宗夏,赵守军
(1. 北京精密机电控制设备研究所,北京,100076;2. 北京航空航天大学,自动化科学与电气工程学院,北京,100191)
0 引 言
与传统的运载火箭相比,垂直起降运载火箭配套的执行装置数量急剧增多,除常规的推力矢量控制(Thrust Vector Control,TVC)外,增加了着陆腿、栅格舵、变推力流量调节和反作用控制(Reaction Control System,RCS)等装置。执行装置的数量急剧增多,引出执行装置在火箭子级系统设计层面的问题,即便是SpaceX 公司的Falcon 9 火箭也仍在试错过程中,主要解决单一功能的实现问题,在能量利用、综合性能、质量、成本等系统优化层面缺乏设计方法和体系。
垂直起降运载火箭众多执行装置系统优化设计需要同时考虑多个性能指标,例如各执行装置的质量、功耗、成本、可靠性、维护性等。这些目标和系统参数之间有着复杂的非线性关系,而且多个目标之间互相矛盾、较难取舍,所以垂直起降运载火箭多执行装置系统优化是一个典型的多目标优化的问题。
多目标优化问题一般不存在全局最优的唯一解,而存在一个非劣解集合,集合中元素称为Pareto 最优解。Pareto 最优解集中的元素就所有目标而言是彼此不可比较的,即不存在比其中至少一个目标好而其他目标不劣的更好的解,也不可通过优化其中部分目标而其他目标不至劣化。
近几十年来,使用进化算法求解多目标优化问题的研究越来越多,例如多目标遗传算法、小生镜Pareto 遗传算法、非支配排序遗传算法、增强Pareto进化算法、Pareto 存档进化策略算法、带精英策略的非支配排序的遗传算法、多目标混合遗传算法、基于Pareto 包络的选择算法、多目标粒子群优化算法等。其中MOPSO 是由Carlos A. Coello 等在2002年提出来的,此算法结合Pareto 理论和粒子群优化算法,具有易实现、易收敛等优点,是一种应用较多的全局优化算法。
本文主要研究运载火箭子级多执行装置的系统优化设计,对多执行装置系统优化设计问题进行数学描述;提出一种多目标优化方法框架;建立多目标优化粒子群算法模型;实现了对多目标优化问题的Pareto非劣最优解集的搜索;最后根据决策准则和层次分析法对Pareto 方案解集进行综合评价得到优选方案。
1 多执行装置数学模型
1.1 数学描述及目标函数
多目标优化问题一般有如下数学描述:
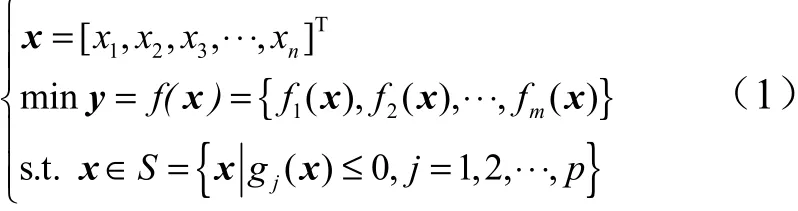
式中为决策向量;为目标向量;g ()为第个约束;为决策变量可行解域。
对于运载火箭子级的多种执行装置:栅格舵伺服系统、RCS 装置、变推力伺服系统、TVC 伺服系统、着陆腿缓冲装置(只含主要缓冲结构)。选取质量、功重比、成本、可靠性、维护性作为评价准则,为方便对比,建立以下归一化目标函数:
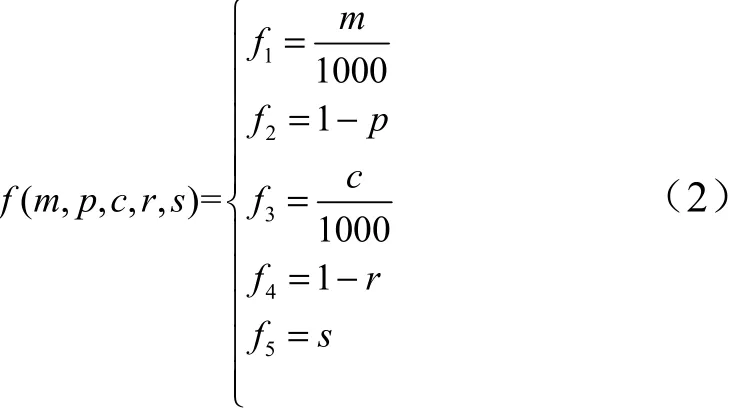
式中 各目标函数求最小值, f越小代表越优;可靠性一般取值范围为0<<1 ,越大代表可靠性越高,所以取1−作为评价目标函数,这样求得极小值对应的可靠性最高,其余同理;为方便对比,将重量(单位kg)和成本(单位万元)都变换到[0,1]区间,都除以1000;各评价指标的上下域值范围通过后面的统计分析方法给出。
1.2 指标评估
考虑国内外主要运载火箭,推力矢量控制、变推力和栅格舵用的执行装置方案有3 种:电液伺服( Electro-hydraulic , EH )、 电 静 压 伺 服(Electro-hydrostatic Actuator,EHA)和机电伺服(Electro-mechanical Actuator,EMA);RCS 装置方案有4 种:冷气、单组元肼、NO/肼类、HO/煤油;着陆腿缓冲装置方案有铝蜂窝和液气缓冲2 种。简要的优化设计流程如图1 所示。
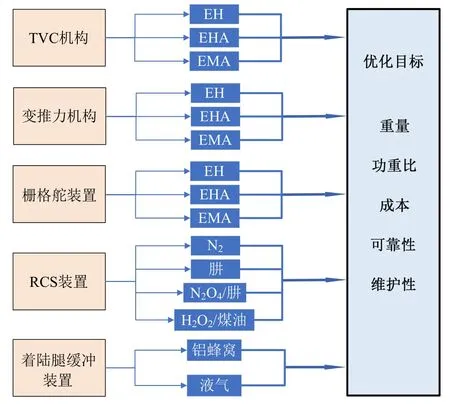
图1 简要优化设计流程Fig.1 Brief Optimization Design Flow Chart
1.2.1 质量评估
质量包括所有执行装置系统的主要质量,如着陆腿的重量评估只包括主要缓冲功能装置:

式中m (= 1,...,5)分别为栅格舵伺服机构、RCS 装置、发动机变推力伺服机构、TVC 伺服机构、着陆腿缓冲装置的质量。
在估算质量时,应在同样的基础假设下进行。如:考虑EH/EMA 伺服机构的质量时,应基于同等输出功率;考虑RCS 装置质量时,应基于同等总冲;考虑着陆腿缓冲装置质量时,应基于同等安装空间。
在运载火箭TVC 控制方面,目前EH 仍是主流方案,但正在被EHA 和EMA 逐步替代。土星V 号运载火箭一子级TVC 系统是最具里程碑意义的产品,采用三余度设计,可靠度达到了载人航天级,其基本控制设计方案目前仍然被中国借鉴,具有较高的参考价值;其采用引流高压煤油直接驱动伺服作动器,省去复杂的液压能源子系统,单台作动器产品干重145 kg。美国航天飞机(Space Shuttle)TVC 采用的“双/三液压能源冗余+四余度电液控制”伺服方案,是另外一个里程碑,仍代表了当今最高水平;SLS(Space Launch System)系统仍然借鉴其方案,但将制造难度大的机械反馈更改为电反馈和数字控制。
中国在载人航天工程的牵引下,成功掌握了三余度伺服机构技术,中国新一代系列运载火箭也在沿用此方案基础上,全面采用了数字控制技术。
近年来,EHA 和EMA 技术发展迅猛,功重比快速提升,美国研制了用于SLS 的四余度EHA 和双余度EMA,中国研制的EHA 性能指标也达到了可用于运载火箭的程度。
下面利用统计分析法分别给出各代表性的TVC用伺服机构的质量参数。
由图2 可知,EH 质量一般在40~300 kg,EHA 质量一般在40~250 kg,EMA 质量一般在10~250 kg。

图2 主流运载器EH、EHA、EMA 统计[15]Fig.2 EH/EHA/EMA of Mainstream Launch Vehicles
由图3 可得,总冲量和RCS 推力器质量呈近似线性关系,由于数量级相差很大, RCS 推力器质量变化并不大,变化范围为±1.5 kg 左右。所以,RCS 系统的质量估计的权重在于推进剂贮箱和气瓶的质量。
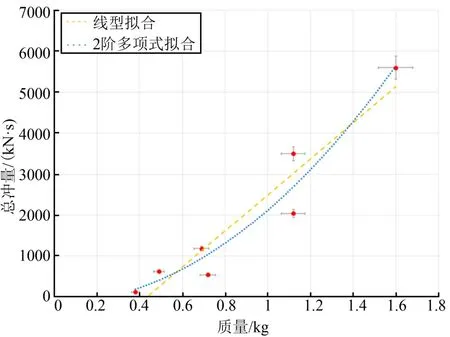
图3 RCS 推力器质量统计(MOOG 公司产品)Fig.3 RCS Thruster Weight Statistics (MOOG Products)
着陆腿缓冲装置质量估算必须基于相同的安装空间进行计算,这里只比较主要缓冲装置的质量,即内置的铝蜂窝夹芯和液气缓冲器的质量。液气缓冲器的质量主要包括内筒、外筒、密封装置、滑阀、油液、气腔等。资料表明,铝蜂窝夹芯的相对密度为16~192 kg/m。
1.2.2 功重比评估
对于EH 而言,质量和功率几乎呈一定的线性关系。图4 为EH 功重关系拟合曲线图,计算可知,线性拟合值为0.9828,近似认定功重关系为简单的线性关系的可信度较高。经计算,EH 的功重比范围为0.05~0.4。

图4 EH 功重关系拟合曲线Fig.4 EH Power-to-weight Ratio Fitting Curve
图5为EMA 功重关系拟合曲线图,计算可知, 2阶多项式拟合值最高,为0.9203,在小于20 kW 功率范围内,认定EMA 功重关系为2 阶关系的可信度较高。经计算,EMA 的功重比范围为0.05~0.8。
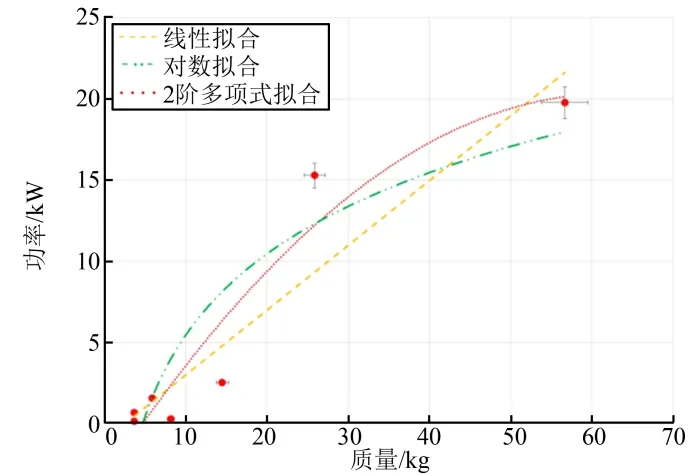
图5 EMA 功重关系拟合曲线Fig.5 EMA Power-to-weight Ratio Fitting Curve
近年来,EHA 集成化设计快速发展,功重比与EMA 相近,范围选为0.05~0.8。其它装置方案功重比评估见后续汇总表。
1.2.3 成本评估
成本估算应尽量全面考虑,可以包括生产、装配、测试、运输等环节。
图6为EH 伺服机构成本、质量、功率以及能源方式等数据统计。
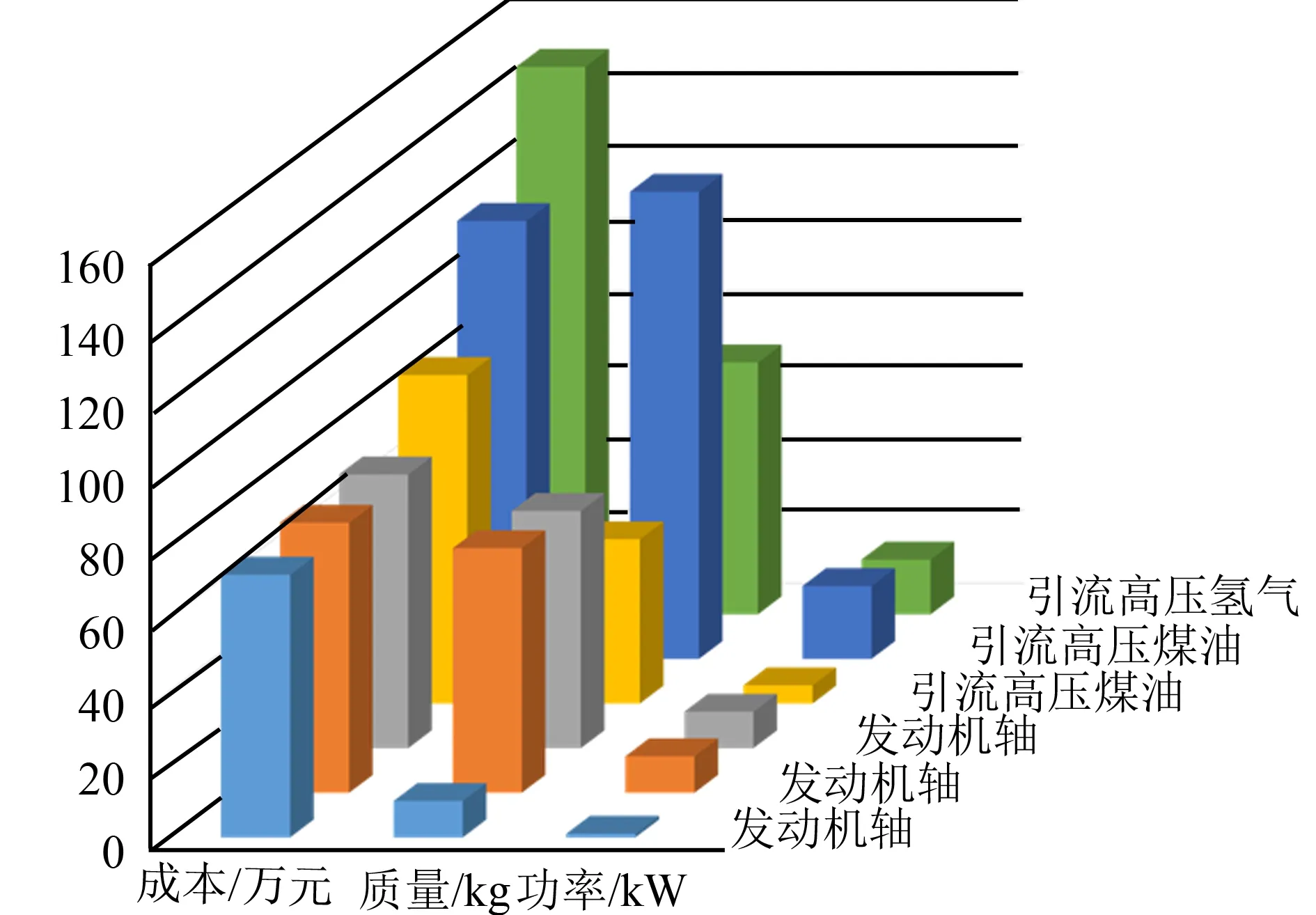
图6 EH 数据统计[15]Fig.6 EH Statistics
由图6 可知,能源方式是影响伺服机构成本的直接因素,引流高压氢气能源方式的EH 成本最高。相比其他伺服系统,EH 的成本最低,EMA 和EH 的成本可参考文献[24],并结合EH 成本相对给出。
RCS 装置的成本估算主要参考不同推进剂的成本。一般来说,有毒或低温推进剂要比可贮存、无毒推进剂的成本要高很多,前者的操作环节、安全措施和设计要求较多,检测程序较长,通常还需要经验更丰富的人员。
着陆腿缓冲装置的成本估算主要参考铝蜂窝和液气缓冲器的成本。
1.2.4 可靠性评估
总可靠性为所有执行装置系统可靠性的乘积:

式中~分别为栅格舵伺服机构、RCS 装置、发动机变推力伺服机构、TVC 伺服机构、着陆腿缓冲装置的可靠性。
其它装置方案的可靠性要求也较高,如发动机变推力伺服机构关系火箭的垂直着陆速度;栅格舵和RCS 装置共同进行姿态控制;着陆腿缓冲装置保证子级箭体平稳着陆。其可靠性评估详见后续汇总表。
1.2.5 维护性评估
维护性评估主要关注:运输、贮存、拆解、测试、密封、维护时间、安全性等。要根据具体方案进行具体分析,比如,RCS 装置系统的NO/肼类推进剂,具有强腐蚀性、爆炸危险性、健康危害性等特性。
对于伺服系统,传统的EH 电液伺服系统,由于储油油箱较大、安装工艺较复杂,其渗漏油可能性较大,抗污染能力较弱,维护性较差;EHA 消除了外部导管,密封性能显著提高,维护性与EMA 相当;EMA则完全消除了液压设计和渗漏油隐患,维护成本最低。其他装置方案之间的详细对比见后续汇总表。
1.2.6 数据汇总
根据以上统计和计算分析,给出各装置各方案评价参数的取值范围,见表1。另外,对于不能直接给出定量参考值的参数信息,如对于RCS,功重比可以参考推重比给出;对于维护性,主要参考维护成本,取值范围为0 到1,越小代表越优。
2 多目标优化算法流程
本研究采用的多目标粒子群算法具体流程如下:
a)初始化粒子群POP,设置种群大小、迭代次数等参数;
认证认可共享的信息应主要来源于政府,因认证认可的信息资源大部分掌握在政府手中,只是信息相对较零散,通过运用现代信息技术,平台可将认证认可信息整合集中起来,其中认证认可相关信息主要可包括技术法规、标准、合格评定、国际互认、信息通报、案例分析等数据库。从“技术、资源、服务”三大维度实现认证认可信息资源碎片化向集成化转变,依据“政府倡导、社会共建、统筹规划、整合发展、互联互通、信息共享”的指导思想,遵循“先进性、实用性、可靠性、安全性、可拓展性”的建设原则。
b)初始化粒子的速度和初始位置;
c)计算各粒子的适应度,根据Pareto 支配关系形成非支配解集;
d)从非支配解集中选取全局最优值;
e)将粒子前一时刻速度和位置代入到更新公式中用来更新下一时刻粒子的速度的位置;
f)计算粒子新的适应度;
g)更新个体最优Pbest 和全局最优值Gbest;
h)更新外部集;
i)若终止条件没有被满足,则跳转到e)继续运行,如果达到最大迭代次数,导出外部解集粒子并把它作为目标函数的非劣解。
3 层次分析法决策
多目标粒子群算法优化后得到的Pareto 前沿是一个非劣最优解的集合,采用层次分析法将能从最优解集合中定量地选出一个最优方案。将决策问题要素按总目标、各层子目标、评价准则分解为不同的层次结构,然后用求解判断矩阵特征向量的办法,求得每一层次的各元素对上一层次某元素的优先权重,最后计算各备择方案对总目标的最终权重,此最终权重最大者即为最优方案。图7 为多目标层次分析法架构图。

图7 多目标层次分析法架构Fig.7 Multi-objective Analytic Hierarchy
4 优化结果分析
图8为多目标粒子群算法求得的Pareto 前沿解集合。由图8 可知,当质量增加时,功重比减小,而成本、可靠性、维护性都呈递增趋势。质量、成本、维护性三者的解分布相似度较高,呈一定的正态分布。而最优方案的确定,需要均衡全部5 个评价准则,通过层次分析法综合决策得出。

图8 多目标优化Pareto 前沿集合Fig.8 Multi-objective Optimization Pareto Front
根据垂直起降运载火箭优先完成发射的基本任务、再完成回收的准则,各执行装置的优先级也不同。其中,TVC 优先级为:可靠性>维护性>功重比>质量>成本;其他机构优先级为:成本>维护性>可靠性>功重比>质量。构成的对比矩阵分别如表2 和表3 所示。
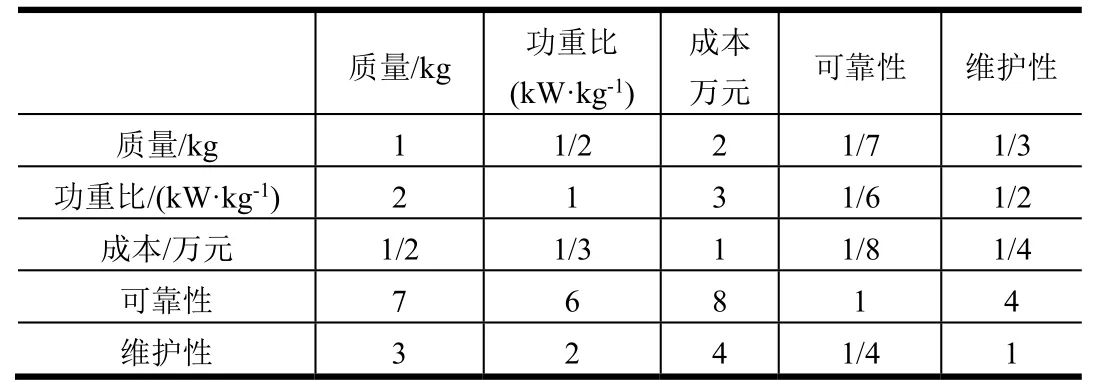
表2 TVC 对比矩阵Tab.2 TVC Comparison Matrix
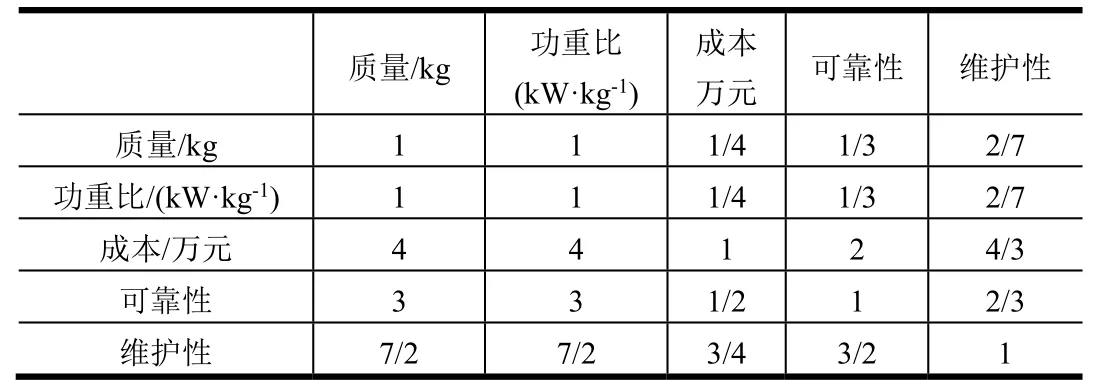
表3 其它机构对比矩阵Tab.3 Other Actuators Comparison Matrix
最后通过层次分析法中层次单排序、层次总排序及其一致性检验,可以得到表4 的权重决策结果。

表4 层次总排序权重决策结果Tab.4 Hierarchical Total Ranking Decision Result
由表4 可知,对于完成主任务的TVC 而言,EHA是优选方案;变推力机构优选EMA 方案;栅格舵优选EMA 方案;RCS 装置优选N方案;着陆腿缓冲装置优选液气缓冲方案。
5 结束语
对垂直起降运载火箭子级多执行装置系统进行了多目标优化研究,选取质量、功重比、成本、可靠性、维护性作为评价准则,建立归一化目标函数,基于多目标粒子群算法求得多执行装置多方案的Pareto 非劣解前沿集,最后利用层次分析法进行权重计算并综合决策,实现了垂直起降运载火箭子级各执行装置最优方案的选择。此优化方法对于运载火箭系统优化和选型具有重要参考意义。