油脂类罐体壁清刮机器人的力学仿真分析*
2022-06-24 04:05:28韩海敏
机械工程与自动化 2022年3期
韩海敏
(河南应用技术职业学院,河南 郑州 450042)
0 引言
油罐是应用最广的一种储油装置,主要储存中央或地方储备油[1]。由于油液黏度大、质量较轻、不易挥发,储存这类油液一般采用大型立式圆筒形固定顶钢板罐[2],采用Q235-B碳素钢板焊接而成。长时间使用后油液容易粘附在油罐内壁,影响油液存储质量的同时,还容易造成油罐内壁腐蚀受损,因此需要定期对油罐内壁进行清洗[3]。为便于油罐内壁的清洗,常采用机器人进行作业[4,5]。
经调研,为了保证机器人的稳定性,常将永磁铁设置在行走轮足或者行走履带上,然而很难实现磁吸附力大小与灵活移动之间的调节,难以做到轻量化设计。为此,提出了一种在油脂类储罐作业的爬壁机器人,通过建立机器人力学模型对其进行分析,并对机器人磁吸附装置的吸附力进行验证。
1 爬壁机器人的总体设计
1.1 设计要求
爬壁机器人设计要求如表1所示[6]。

表1 爬壁机器人设计要求
1.2 总体结构设计
结合总体方案的设计要求,设计出了油脂类罐体壁爬壁机器人的整体结构,其三维模型如图1所示。该机器人主要由行走装置、吸附装置、清刮装置三部分组成。在以上装置有机结合下,完成油脂类罐体壁的清洗任务。其中,行走装置中,行走轮与行走电机连接,且行走轮与辅助万向轮呈方形分布,如图2所示。承载板表面设置有升降组件,其升降端伸入承载板下方且连接有吸附装置,升降组件带动吸附装置,实现与油罐内壁之间的距离调节,从而实现吸附力大小的调节。

1-承载箱;2-调高电机;3-调高丝杠;4-导向柱;5-调高板;6-固定架;7-转轴;8-锁紧螺母;9-蜗轮;10-承载柱;11-弹性伸缩杆;12-刮板;13-辅助万向轮;14-蜗杆;15-行走轮;16-行走电机;17-门型架
使用时,通过变磁力吸附装置将机器人吸附在油罐内壁,通过调高组件带动承载柱下降,使刮板与油罐内壁相接触,利用弹性伸缩杆的弹力推动刮板,使刮板始终与油罐内壁充分接触。该装置整体结构简单,大大降低了装置的重量和成本。进行油罐内壁清洁时,行走轮的轴线与油罐的轴线平行,行走电机驱动行走轮旋转,从而使装置整体沿油罐内壁做圆周移动,刮板随着装置移动对油罐内壁进行清刮,圆周清刮完成后需要改变行走路线,承载箱内部的转向电机带动门型架旋转,使行走轮的轴线与油罐的轴线相垂直,行走电机驱动行走轮旋转,使装置整体沿着油罐的轴向移动,移动完成后转向电机带动门型架恢复原状态,重复对油罐内壁进行圆周清刮。在清扫路线的调整过程中,装置沿油罐轴线直线运动,不会造成清扫遗漏,使用效果好。

13-辅助万向轮;15-行走轮;16-行走电机;17-门型架;18-吸附装置;19-转向电机;20-升降组件
2 爬壁机器人安全吸附力学分析
通过查阅资料,爬壁机器人在立式罐体壁面上工作时,主要出现了机器人沿竖直壁面下滑及倾覆脱落两种失稳形式[7],为确定机器人的临界吸附力,需要对以上两种情况进行受力分析,如图3所示。
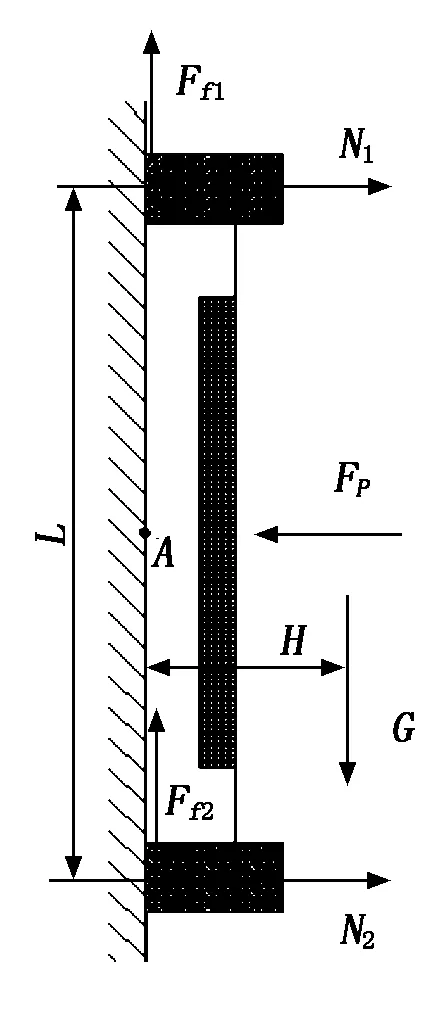
图3 机器人沿壁面受力分析
由于所研究的油脂类罐体较大,为方便研究,将罐壁面假设为平直面[8]。机器人在壁面上运动时,安全系数K取1.7,机器人总重量(自重及载荷)G为45 kg,机器人质心到壁面之间的距离H为110 mm, 左右两轮距离L为490 mm,罐体因使用时间较长壁面会残留一定的油污,根据参考文献[9],橡胶车轮与钢板接触的摩擦因数μ为0.5~0.8。
2.1 沿壁面下滑
爬壁机器人各轮的支持力大于0;辅助万向轮和壁面之间为滚动摩擦,摩擦力可以忽略。为防止机器人沿壁面下滑,需要以下约束条件:
(1)
(2)
(3)
其中:Ffi为罐体壁对第i个行走轮的静摩擦力,i=1,2;Ni为机器人第i个行走轮所受到支持力;Fp为磁吸附装置的磁吸附力。由此得到:
Fp≥G/μ.
(4)
2.2 倾覆脱落
为防止机器人出现倾覆脱落的情况,在机器人正中央下方取点A,对点A列出力矩方程,得:
(5)
联立式(3)、式(5)得:
Fp≥2HG/L.
(6)
2.3 机器人的安全吸附力
通过以上分析,要使机器人不会沿壁面下滑和倾覆脱落,还要考虑到安全系数。经分析比较,易发现式(6)的值小于式(4)的,故爬壁机器人所需的最小吸附力[Fp]为:
[Fp]≥K·max(G/μ).
(7)
将机器人各项参数代入式(7)中,当摩擦因数取0.5时,机器人磁吸附机构所需要的临界吸附力最大,至少为1 530 N。
3 磁吸附装置磁路设计及仿真分析
吸附装置为板式磁铁,根据结构设计要求,其安装空间约为200 mm×200 mm,磁路结构选用的是磁能利用率较高的乙型磁路[10,11]。吸附单元之间按照一定的方式组合而成[12],所选磁块尺寸为:27 mm×35 mm,27 mm×70 mm,54 mm×35 mm,54 mm×70 mm。永磁体充磁方向如图4所示。

图4 永磁体充磁方向图
在Ansoft软件中,建立吸附装置的三维模型并采用自加密网格划分,得到其有限元模型,如图5所示。

图5 吸附装置三维模型及网格划分
对不同磁吸附力情况下的磁场状况进行有效的仿真分析。图6为仿真中工作距离设定为 7 mm和10 mm这两种情况下的磁通密度分布比较。
使用Ansoft软件对磁吸附装置在不同工作距离下进行磁场仿真,得到磁吸附力与工作距离之间的关系如图7所示。由图6和图7可知,随着吸附装置与壁面之间距离的不断增大,磁场逐渐减弱,磁吸附力也逐渐减小。当吸附装置离罐壁面的距离取为8 mm时,其磁场仿真的磁吸附力大小与理论计算临界吸附力大小基本吻合,满足正常工况的要求。
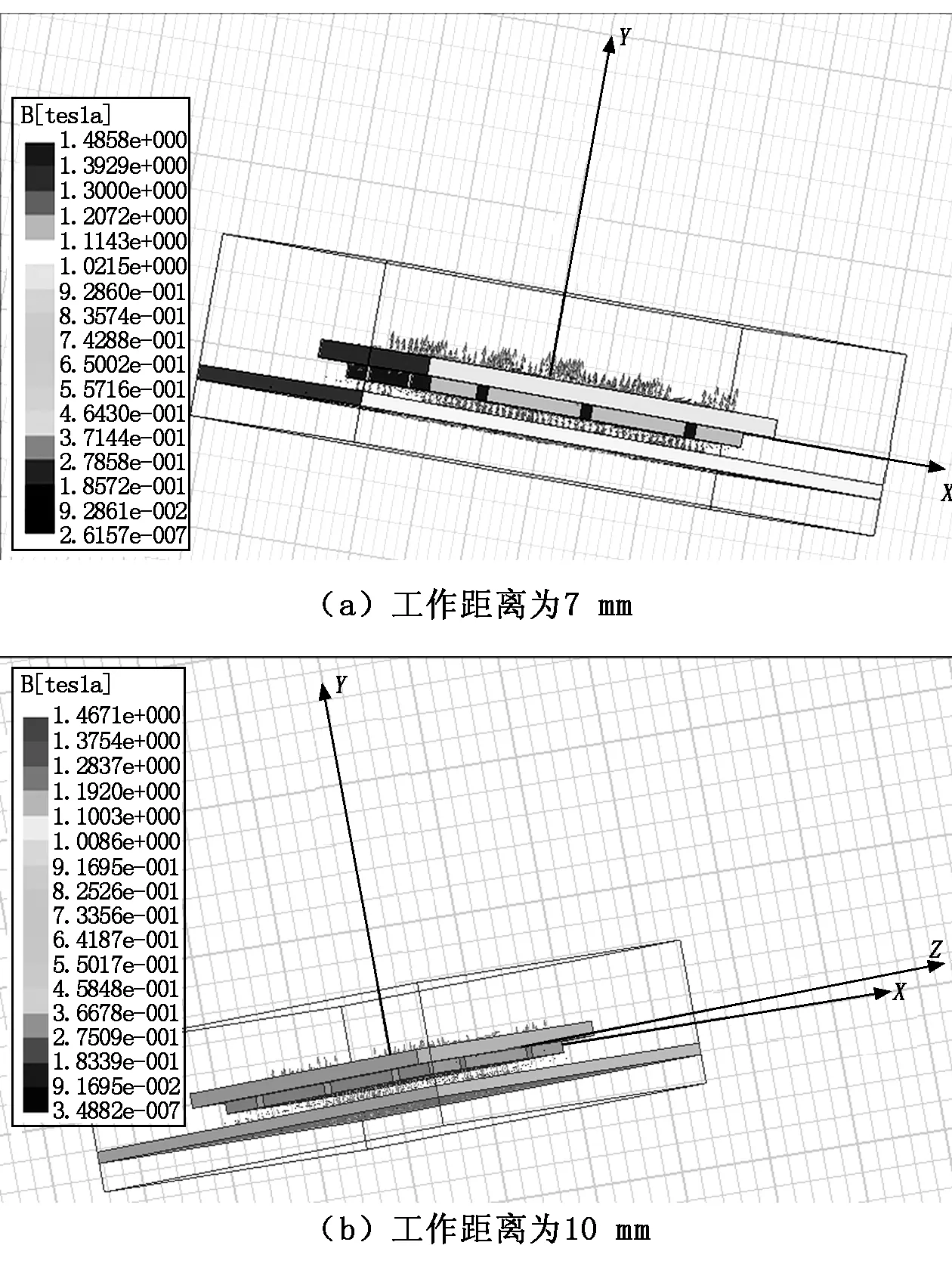
图6 工作距离为7 mm和10 mm时的磁通密度分布图

图7 磁吸附力与工作距离之间的关系
4 结束语
在满足结构安全可靠、轻量化及成本低的原则下,设计出了爬壁机器人的整体机械结构。建立了机器人不沿壁面下滑及倾覆脱落两种情况下的力学模型,得到了爬壁机器人在壁面运行时的安全吸附力。对磁吸附装置的磁路进行设计,并利用Ansoft有限元软件对磁吸附装置三维模型进行仿真,比较了不同壁面距离下磁通密度的分布情况,得出了吸附力与工作距离之间的关系,结果表明仿真结果与理论计算临界吸附力大小基本吻合,满足正常工况的要求。
猜你喜欢
英语世界(2023年11期)2023-11-17 09:24:24
船海工程(2022年6期)2023-01-02 13:05:12
力学学报(2022年6期)2022-07-10 13:13:38
云南化工(2021年6期)2021-12-21 07:31:30
中国特种设备安全(2021年12期)2021-04-26 14:37:12
水上消防(2020年4期)2021-01-04 01:51:20
机电工程(2020年10期)2020-11-04 01:29:46
石家庄铁道大学学报(自然科学版)(2020年4期)2020-02-22 01:39:48
山东工业技术(2016年15期)2016-12-01 05:30:44
广东石油化工学院学报(2016年6期)2016-05-17 05:17:29