基于前景理论的换道决策模型研究
2022-06-24 13:07:00顾金刚蒲科辰朱自博
重庆交通大学学报(自然科学版) 2022年6期
顾金刚,蒲科辰,杨 达,,吕 蒙,朱自博
(1. 公安部交通管理科学研究所 交通控制技术研究部 ,江苏 无锡 214151; 2. 西南交通大学 交通运输与物流学院, 四川 成都 610031)
0 引 言
车辆换道行为是常见的驾驶行为,换道行为往往会干扰其它车道车辆的运行,影响交通流的稳定性,所以研究车辆换道行为十分重要。在换道决策阶段,驾驶员以自身特性为基础,接受周围车辆的速度、间隙、加速度等诸多因素的刺激,做出是否换道、车道选择的决策。
现有的换道模型可分为4类:基于规则的模型、基于效用理论的模型、基于机器学习的模型和基于动机的模型[1]。基于规则的模型假设驾驶员服从若干规则来做出其车道改变的决策,例如优选的目标车道、改变车道的必要性、改变车道的可行性等,这一类别的代表性模型是Gipps换道模型[2]。基于规则的模型比较灵活,但没有考虑驾驶员行为的变化。基于效用理论的模型描述驾驶员通过比较车道之间效用的大小来决定是否换道以及换往哪一条车道的过程,这一类模型首先由K.I.AHMED[3]提出,D.SUN等[4]建立了多种换道情景下的效用选择换道模型。基于机器学习的换道模型通过训练大量的换道数据,挖掘出影响驾驶员做换道决策的潜在因素,这一类模型一般具有更高的精度,但所需的数据量较大。常用的机器学习算法包括人工神经网络、模糊逻辑、决策树、随机森林等[5-7]。基于动机的换道模型中,驾驶员通过评估改变车道能否获得更大的效益来决定是否换道,这类模型的代表是A.KESTING等[8]提出的MOBIL模型。
其中,基于效用理论的换道模型[9-10]从驾驶员的角度入手,分析驾驶员作为决策者产生换道意图并选择目标车道的决策过程,可以较好的反映驾驶员的异质性特征和决策机制。然而,以往的离散选择换道模型以随机效用理论为基础,并假设驾驶员是完全理性的,没有考虑驾驶员在换道过程中的有限理性特征对换道决策的影响,模型与实际情况不符。前景理论最初由D.KAHNEMAN等[11]提出,K.V.KATSIKOPOULOS等[12]最先将前景理论应用于交通领域的研究,证明了前景理论在不确定条件下出行选择行为研究中的适用性。在前景理论框架下,驾驶员在做决策时,并不总是按照“概率法则”来估计未来不确定的事件,而是以一定时间内的所有属性值为基础,综合考虑这些指标的变化,从而对未来的速度或间距等做出预测。而且,同样是分析不确定性因素对换道决策的影响,前景理论通过设立“参考点”划分收益与损失,据此来计算价值函数,并通过驾驶员的心理概率函数计算收益和损失的权重,最终得到每个方案的前景值。这个过程体现了驾驶员评价车道效用的有限理性,也体现了驾驶员在换道决策过程中潜在的非理性行为。所以,基于前景理论的换道决策模型更符合驾驶员的真实换道过程。
1 模 型
1.1 前景理论
前景理论将决策者的决策行为划分为前后2个阶段:编辑阶段和评价阶段。在编辑阶段,决策者设定参照点,将选择枝属性的各种可能结果编辑为相对于参照点的收益和损失值,计算选择枝相对于各属性的价值,并根据结果发生的客观概率计算主观概率。在评价阶段,决策者以上述资料为基础计算各方案的前景值,选择前景值最大的方案作为最终结果。
价值函数和决策权重函数的形式由D.KAHNEMAN等[11]提出,函数形式为:
(1)
(2)
(3)

笔者采取前景理论提出者A.TVERSKY等[13]的标定值,根据其标定结果,α与β取值0.88,表示风险态度系数,α与β越大表示驾驶员越倾向于冒险,α与β最大取1,此时为风险中立。λ取值2.25,表示损失规避系数,λ>1说明此时决策者对损失状况更加的敏感。γ,δ的标定值分别为0.61和0.69。综合以上,计算方案i针对属性j的前景值计算公式为:
(4)
前景理论是否适用,取决于它考虑的影响决策的因素是否为确定性的。在换道决策过程中,驾驶员需要考虑本车道以及相邻车道的状态,在主动换道决策的情况下,只有某个车道的状态让驾驶员感到满意,驾驶员才会选择该车道。在感知范围内,驾驶员评价车道状态的指标主要为在此车道上可以达到的行驶速度和可以享受到行驶空间,这些状态都具有不确定性,速度和间距的变化受到前方诸多车辆以及交通环境的限制,前方车辆的状态也在一定范围内波动。同时,前方车辆处于某个状态的客观概率未必存在,即使存在也难以得到。因此,可通过前景理论描述驾驶员利用有限信息进行推理选择的真实过程。
1.2 模型构建
1.2.1 模型框架
前景理论模型的编辑阶段首先设定各评价指标的参照点,并将车道的评价属性分为收益和损失值两类,利用实际的客观概率获取主观概率。评价阶段依据上一阶段的结果,计算各车道的前景值并选其最大,建模流程如图1。
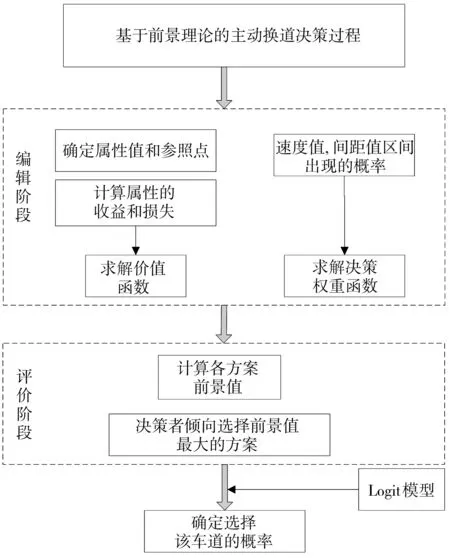
图1 模型框架Fig. 1 Model frame
1.2.2 编辑阶段
主动换道决策过程是二项选择情况下驾驶员的决策过程,驾驶员在感知并评价本车道和相邻车道的相关属性后,主动选择更满意的车道。设换道车开始产生横向位移的时刻为t0,在t0时刻之前的时间段是换道决策和换道准备的时间段。由于每位驾驶员具体的决策时间难以估量,为了研究方便,根据实际数据取t0时刻之前的一段时间,这段时间必定包含了驾驶员思考并做出决策的时间,换道场景如图2。
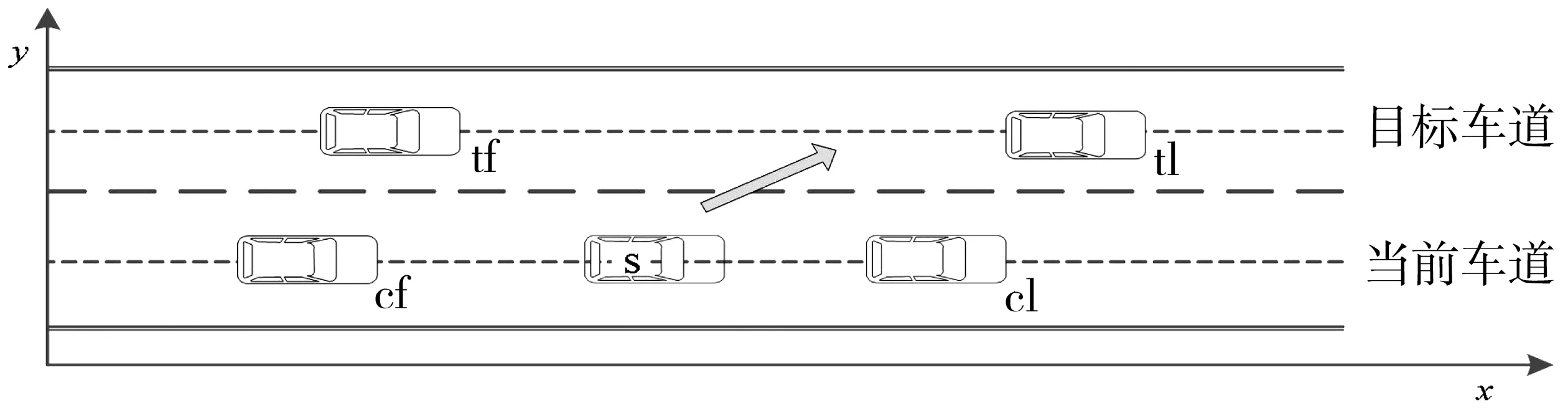
图2 换道场景示意Fig. 2 Schematic diagram of lane changing scene
换道决策过程中,驾驶员对目标车道的某些指标可能更加关注。但为了满足用前景值来评价比选不同车道的要求,应选取本车道和目标车道同等的属性作为评价指标。这些属性包括速度,速度差,车头间距,加速度,是否有重型车辆等。如驾驶员会思考换道之后在目标车道上,是否会拥有比原车道更大的速度和车头间距。因为车辆在两条车道上行驶的速度不同,每个速度值或者是速度区间出现的概率也不相同,所以这些评价指标都是不确定性的指标。更大的速度和车头间距意味着更好的舒适性和更高的效率,这正是决策者所追求的东西,可能影响驾驶员做决策的评价指标有:①本车道前车的速度Vcl,本车道后车的速度Vcf,主车与本车道前车的车头间距Xs-cl,主车与后车的车头间距Xs-cf;②目标车道前车的速度Vtl,目标车道后车的速度Vtf,主车与目标车道前车的车头间距Xs-tl,主车与后车的车头间距Xs-tf。
因为在实际驾驶过程中,驾驶员的主要注意力放在前方车辆上,所以笔者先选取与前车有关的因素作为评价指标。通过查阅大量有关换道决策过程的文献,驾驶员主要关注前方车辆速度和间距两个因素[14-15]。所研究的换道决策问题是一个风险型双属性的决策问题,在决策时,驾驶员对这两个因素的敏感性不同,因此为不同属性设立权重。
确定了评价指标后,需要确定不同指标的参照点才能计算损益值。参照点选取是前景理论中的重要内容。最初,前景理论运用于股票投资领域时,参照点设立为最初买入股票时的价格,之后的价格涨跌以此为基础。而后,又有观点认为参考点应该是购买者对股票未来的预期价格。第3种观点认为参考点应该设立在初始价格和预期价格之间。目前,人们对参照点的形成机理并不清晰,参照点的选取往往是主观设定。在换道领域,比较适合的做法是选取驾驶员在具体交通条件下期望的速度和间距作为参照点。速度指标的参照点应根据实际情况设立,也应满足道路限速条件的要求。城市道路和公路的速度参照点存在差异,在不同的交通情况下,比如拥堵和畅行两种交通情况下,驾驶员心中期望的速度也明显不同。所以,针对具体场景,选取正常条件下换道车前车的平均车速作为参照点。间距指标参照点的特性和速度指标相似,所以选取实际交通条件下,驾驶员在换道决策时间段与前车的平均车头间距作为参照点。相关变量的定义如表1。

表1 变量定义Table 1 Variable definition
Xij为车道i对属性j的结果,代表Vcl、Xs-cl、Vtl、Xs-tl的值。目前所选取的评价指标都是效益型指标,即驾驶员希望车速越高越好,车与车之间距越大越好。参考点Rj已经确定,车道属性值相对于参考点Rj的收益Gij和损失Lij的计算公式为:
(5)
(6)
将求得的收益和损失代入价值函数式(1)可求得价值。
收益Gij的价值为:
(7)
损失Lij的价值为:
(8)
计算出价值后,需要计算决策权重。根据前景理论中关于决策权重函数的定义,计算决策权重的基础是方案出现各种状态的客观概率p。在换道问题上,概率p表示车道上的速度值和间距值出现各种状态的客观概率,由于前车速度变化的随机性较大,这个客观概率的获取比较困难。为了研究方便,绘制决策时间段内每间隔0.1 s时速度值和间距值的频率分布直方图,以某个速度或间距区间出现的频率来评判该区间出现可能性的大小,并将该频率值作为客观概率代入式(2)和式(3)计算。同时,将该速度或间距区间集中为中间值,用中间值代表此区间,将连续的评价指标离散化,更方便计算损益值。
直观上来看,影响本车速度的主要原因包括前面若干车辆的速度,驾驶员会思考并预估下一时刻前车将出现怎样的速度,预估的基础就是决策时间段内前车出现的各种速度状态,用速度频率分布直方图来描述各种速度值出现的可能性比较合理。在判断该车道对于某个属性的结果时,决策者为所有可能的出现结果概率赋予一个权重,从而将该结果发生的客观概率转变为决策者的主观概率,这就是决策权重函数的意义。
以上面的计算结果为基础,利用前景值计算式(4)可以计算出方案i针对属性j的前景值。
1.2.3 评价阶段
为消除不同物理量纲的影响,需要将前景值V规范化为V*,规范化公式为:
(9)
其中:
(10)
最终,每个方案的综合前景值ui为:
(11)
Wj为评价指标的权重,表示决策者对不同属性的敏感程度。两个车道的综合前景值都计算出来后,比较实际数值的大小,决策者倾向于选取前景值更大的车道。
1.2.4 Logit模型
离散选择模型是以建模者对不确定因素的抽象为基础。基于随机效用的离散选择模型无法更加细致的描述决策者真实的决策过程,因此许多学者尝试实现前景理论和离散选择模型的结合。事实上,在影响车道前景值的很多因素中,有一些因素难以测量,比如车道的路面状况、气候、地形等等,这部分随机变量也将影响车道的前景值。假设个人在每次选择中总选择前景值最大的车道,以此假设为基础来推导基于前景理论的Logit模型。二项Logit模型中假定随机变量ε1和ε2服从二重指数分布(Gumbel分布),推导出选择(目标车道)的概率为:
(12)
式中:u1、u2可以通过式(11)计算得到。将式(11)中的未知参数Wj和Gumbel分布中的参数b相乘,设为新的参数xj,采用极大似然估计法来标定,并进行精度检验。
2 参数标定和模型验证
2.1 数据介绍
使用的数据是美国联邦公路局NGSIM(next generation simulation)研究计划所获得的数据。该数据采用航测的方法,用高空照相机以每秒10帧的频率对交通路况进行拍摄,获得的车辆位置、车长、速度、加速度等信息,时间精确到0.1 s。从处理后的NGSIM中抽取换道和不换道2种情形下的速度和间距数据,并对数据进行进一步筛选。
驾驶员在换道决策的时间段中关注的因素包括本车道前车的速度值和目标车道前车速度值。驾驶员也会考虑换道动作是否能够带来速度值的收益,这就需要考量前车速度的变化趋势。由于换道前后影响路段车速的因素太多,很难预测出前车速度将处于怎样的状态,更难得到产生结果的客观概率。事实上,驾驶员在做换道决策时,能接收的信息只是大约的速度分布情况,由此判断两车道的“好坏”。因此,采用决策时间段内前车速度位于某个速度区间的频数作为驾驶员决策的依据,由此得出驾驶员的心理概率。驾驶员对速度的感知不会特别精确,比如速度值变化较小时,驾驶员难以察觉,在抽取的NGSIM数据中,换道决策阶段车辆速度的波动性不会太大,所以将速度值分组绘制频率分布直方图,组距大部分在5 km/h以下。取速度值每组内的中间值作为属性值,通过这种方式将连续的速度值离散化,按同样的思路对间距值进行处理。
从横向位移产生时刻往前取20 s作为决策阶段的数据,足够包含驾驶员的主动换道决策时间。分析20 s时间内的速度和间距值频率分布情况,以此作为研究车道上速度和间距变化趋势的基础,并借助前景理论中的决策权重函数计算驾驶员的心理概率。从NGSIM的US-101数据库中提取ID-1069号车的本车道前车速度,20 s内的速度频率分布直方图,如图3。

图3 速度频率分布直方图Fig. 3 Histogram of velocity frequency distribution
将速度离散化为15.5、20.5、25.5 km/h等,对应的频率值为30%、20%、21%等。按照这种方式处理数据,用于模型的运算。筛选数据后得到的结果用途见表2,从US-101中共提取向左换道数据148组,不换道数据410组。

表2 数据筛选结果Table 2 Data filtering results
2.2 标定方法
利用python的statsmodels模块进行Logit模型参数标定。由于模块中的Logit模型和Logit模型在形式上有一定的区别,所以转化式(12),使之成为stats-models 模块中标准的Logit形式以方便使用该模块。
(13)
p1/p0是事件发生的概率和事件不发生的概率之比,称之为Odds,对Odds取对数得到Logit模型,所以该二项选择的具体Logit模型为:
(14)
将b与W1,W2结合成为新的参数x1,x2,以式(14)化简为:
(15)
使用python3.0编程标定未知参数x1和x2,该参数包含了Gumbel分布中的参数b和换道决策不同影响因素的权重参数Wj。
使用数据Ⅰ进行标定,共279组数据,参数估计结果如表3。

表3 前景理论Logit模型标定结果Table 3 Calibration results of Logit model based on prospect theory
使用极大似然函数估计法进行参数标定得到模型为:
(16)
2.3 标定结果
为验证模型的适用性,需要对模型的精度进行验证。通过模型可以计算出p1/p0(Odds),从而得到驾驶员选择目标车道的概率p1。由于模型得出的是一个换道概率的结果,所以为驾驶员是否换道界定一个分界概率,当预测的换道概率大于等于该值时,判定驾驶员换道,否则不换道。一般选取0.5作为分界值,即预测概率大于该分界值则驾驶员倾向于换道,否则保持原车道行驶。使用从US-101中提取的数据Ⅱ(279组)验证模型,总的正确率达到67%,其中换道行为预测的正确率约为74.8%,不换道行为的预测率约为67.5%。
将1.2.2节中的所有评价指标都考虑在内(后车的相关指标),即Xij包括本车道前车的速度Vcl,后车的速度Vcf;主车与本车道前车的车头间距Xs-cl,与后车的车头间距Xs-cf;目标车道前车的速度Vtl,后车的速度Vtf;主车与目标车道前车的车头间距Xs-tl,与后车的车头间距Xs-tf。同样取平均值作为参照点,利用2.1节中相同的数据进行模型的标定与验证,得到的模型预测正确率约为72%。这表明驾驶员实际决策的过程中,容易忽略本车道后车与目标车道后车的一些因素,驾驶员接收的信息有限,自身认知也有限。本车道后车和目标车道后车对驾驶员主动换道决策的影响不大,仅选取前车速度和本车与前车车头间距两种属性来计算前景值比较合理。
建立基于随机效用理论的主动换道模型来比较两种模型的精度,同样采用前车速度和车头间距作为评价车道的指标,随机效用理论直接采用实际的车速和间距数据来表示车道效用,设本车道效用为V1,目标车道效用为V2:
V1=a0+a1Vcl+a2Xs-cl
(17)
V2=a0+a1Vtl+a2Xs-tl
(18)
根据随机效用理论,驾驶员选择2条车道的决策是独立的。车道的效用包括固定效用(V1,V2)和随机效用两项,假设随机效用服从二重指数分布,可以得到基于随机效用理论的二项Logit模型:
(19)
从2.1节的数据中抽取200组数据标定基于随机效用理论的换道模型,标定结果如表4 。

表4 随机效用理论Logit模型标定结果Table 4 Calibration results of Logit model of stochastic utility theory
得到的结果为:
(X12-X22)+0.303 8
(20)
用原200组数据验证以上随机效用模型,正确率为62.5%。从2.1节的数据中抽取新的148组数据验证模型,正确率为56.8%。其中换道行为预测的正确率为64.6%,不换道行为预测的正确率为53%。基于两种理论的模型准确率结果如表5。

表5 模型准确率Table 5 Model accuracy
由于采用的相同的数据和相同的评价指标,两类模型的验证结果具有可比性。基于随机效用理论的主动换道模型对于换道行为的预测准确率比基于前景理论的模型低约10%,对不换道行为的预测精度比前景理论模型少14.5%,预测不换道行为的失误代表在随机效用模型预测驾驶员本应换道的时候,驾驶员并没有做出更换车道的决策。经由式(17)、式(18)计算出的车道效用值是车道的绝对属性,并非驾驶员对车道的感知与评判,车道的前景值才是从驾驶员角度考虑的决策者对车道的满意程度。在车道效用值足够大时,驾驶员可能因为该车道前车速度或间距波动太大而放弃换道。可以看出换道动作实际上存在一定成本,对驾驶员来说,换道也意味着麻烦和一定的风险性,在做主动换道决策时,驾驶员不会太过随意的换道,前景理论相比较于随机效用理论可以更好的描述这一决策过程。
3 结 论
基于效用理论的换道模型无法反映驾驶员的有限理性特征,无法表现出驾驶员面对风险(收益和损失)的不同态度以及处理大小概率事件的不同态度,针对现有模型的不足,笔者将前景理论引入换道决策领域,以前景理论为基础建立换道决策模型,并将一定时段内速度和车头间距分布作为评价指标进行决策,更符合驾驶员真实的决策过程。得到以下结论:
1)相比较于效用理论换道模型,基于前景理论的换道模型预测精度更高,可以体现出换道动作存在一定成本,对不换道行为的预测也更准确,能更好的描述和预测换道决策行为。
2)在评价指标中,驾驶员对速度的敏感性更高,调整评价指标的数量,增加考虑后车相关因素,模型的准确度变化不大,可以看出驾驶员在主动换道决策中更加关注前车的相关因素。
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02
科学大众(2021年9期)2021-07-16 07:02:50
建材发展导向(2021年6期)2021-06-09 05:57:08
中国交通信息化(2020年11期)2021-01-14 03:30:34
今日农业(2020年17期)2020-12-15 12:34:28
少儿美术(2019年7期)2019-12-14 08:06:22
中国外汇(2019年11期)2019-08-27 02:06:32
太空探索(2016年10期)2016-07-10 12:07:01
中国塑料(2016年9期)2016-06-13 03:18:48
中国交通信息化(2015年10期)2015-06-06 06:39:31