一种可通过耐张线夹的电力线路巡检机器人
2022-06-16 14:18文戴
装备制造技术 2022年3期
余 斌,周 晨,呙 年,陈 伟,郑 睿,李 文戴 虎
(1.国网安徽安庆供电公司,安徽 安庆 246000;2.安徽师范大学物理与电子信息学院,安徽 芜湖 241002;3.安徽省智能机器人信息融合与控制工程实验室,安徽 芜湖 241002)
0 引言
我国资源分布不均匀,其中电力方面表现尤为突出,长距离架设高压线设备进行电力传输对于保证各地区用电需求至关重要[1]。但部分地域环境恶劣,输电线路长期裸露于自然环境中,由于天气影响、电力损耗等因素会导致高压线磨损、断裂。为了加强防护,需定期对线路巡检,发现问题及时维修[2]。
目前国家电网的巡线方式主要为人工操作,巡检工程师需携带摄像设备登上高压输电线路进行带电作业,在强磁、高压的条件下,工程师人身安全受到威胁,同时人工巡检的速度过于缓慢,效率低下[3]。为了提高工作效率及保障工程师的人身安全,需要利用输电线路安全、稳定的传输电力资源,采用高压线巡线机器人代替人来执行巡检任务,这不仅能提高巡线效率,且能保证安全稳定性[4]。
高压线巡线机器人作为一个新的研究方向,近年来受到较多的关注[5],国内外围绕该机器人的研究工作取得了一些进展。其技术难点在于机器人的平衡性、续航能力及越障方法。耐张线夹是高压线巡线机器人需跨越的障碍物之一[6],它的结构中有钢锚,利用钢锚把绝缘子串固定在杆塔之上,导线在绝缘子串的下方通过钢锚相连接[7,8]。耐张线夹的钢锚由于耐张线夹处宽度与高压线不同,而通常机器人的夹爪尺寸依据高压线的尺寸设计,使得机器人的夹爪与耐张线夹的吻合度不高;耐张线夹与水平面之间存在夹角,机器人在该处运行时存在滑落的风险;由于钢锚的阻碍,机器人无法从其上方整体通过,因此机器人顺利通过耐张线夹存在技术难度[9]。
日本研制的Expliner巡线机器人[10]、加拿大研制的LineScout机器人[11,12]在多股高压线运行均设计旋转机构用于越过耐张线夹。由于这些机器人在多股线上运行,跨越耐张线夹的稳定性较好。相比较多股线运行的机器人,单股线运行的高压巡线机器人具有体积小,结构简单、灵活等特点,近年来得到了广泛的研究。如吴功平教授[13]团队研制的双臂巡线机器人,该装置设计结构比较简单,重量适中。上述研究中,机器人运行时均是单臂悬挂在高压线上,容易发生倾斜和脱落,且未见通过耐张线夹的报道。文献[14]设计了前后三臂的机构,机器人可以通过防震锤和耐张线夹,但该文献只开展了仿真分析。西安交通大学的杨德伟博士[15]发明了一种可以调节重心的三臂巡线机器人,在实验室的环境下成功通过耐张线夹,但该研究需设计重心调节装置,使装置得体积增大,重量增加。通过以上分析可知,夹爪式电力线巡检机器人的结构原理如图1所示,底座起到支撑的作用,步进电机和主动轮通过联轴器相连接,主动轮和从动轮通过齿轮传动,机械臂和夹爪连接在从动轮上,随着从动轮的运动而动作。

图1 电力线巡检机器人的结构图
为了使电力巡检机器人通过耐张线夹,首先设计夹爪,使其夹爪具有可吻合多种线型且接触面积大、摩擦系数大等特点;并且设计传动机构,通过齿轮传动带动机械臂使机器人向前运行,通过机械臂的旋转避免机器人与钢锚发生干涉。
1 夹爪的设计
1.1 夹爪的形状设计
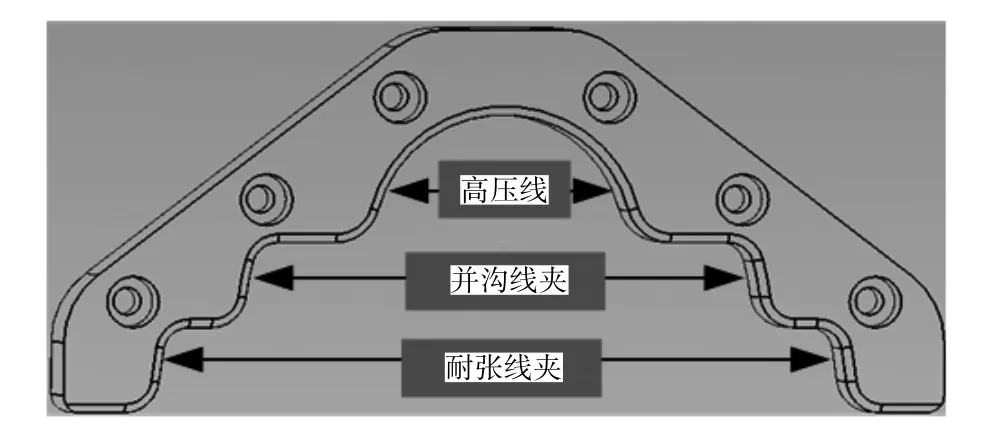
图2 适合于多种线型的夹爪示意图
图2中夹爪双侧面均有圆孔,二者通过圆孔内部丝钉进行连接,整个夹爪机构设计成多曲线型,自上而下分别适应高压单股线、并沟线夹、耐张线夹三种直径线型,保证夹爪在巡线过程中与输电线路紧密贴合,可大大降低装置脱落的风险。
1.2 夹爪和高压线之间摩擦力的研究
耐张线夹处高压线存在坡度,为了使得机器人不沿着高压线滑落,夹爪与高压线之间需存在足够的静摩擦力,通常在夹爪的内部填充橡胶之类摩擦系数较大的材料。设机器人的质量为m,高压线与水平面的夹角为θ,机器人的重力沿着高压线方向的分力Ghc为:
设夹爪与高压线之间的最大摩擦系数为μmax,那么最大静摩擦力为:

式中Gvc是机器人的重力垂直于高压线方向的分力,其大小为:

对于橡胶类材料,式(2)中的μmax与压强成反比[16],所以当Gvc一定时,夹爪与高压线之间的接触面积越大,μmax也就越大。因此对耐张线夹处夹爪与高压线之间的接触方式进行分析,如图3所示。由图3(a)可知,此时夹爪与高压线之间是面接触,接触充分;由图3(b)可知,此时夹爪与高压线之间的接触方式是线接触,接触不充分。
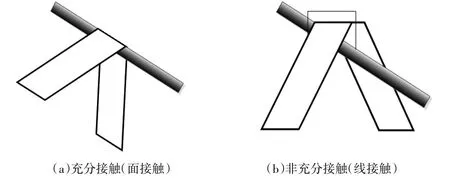
图3 耐张线夹处夹爪与高压线之间的接触方式示意图
耐张线夹处的坡度的斜率大并且变化,机器人夹爪与高压线之间的接触方式主要是线接触。因此需增大夹爪与高压线之间的接触面积使得二者之间的静摩擦力增大,为此在夹爪的内部填充柔性物质,利用柔性物质的形变来增大接触面积,其原理如图4所示。
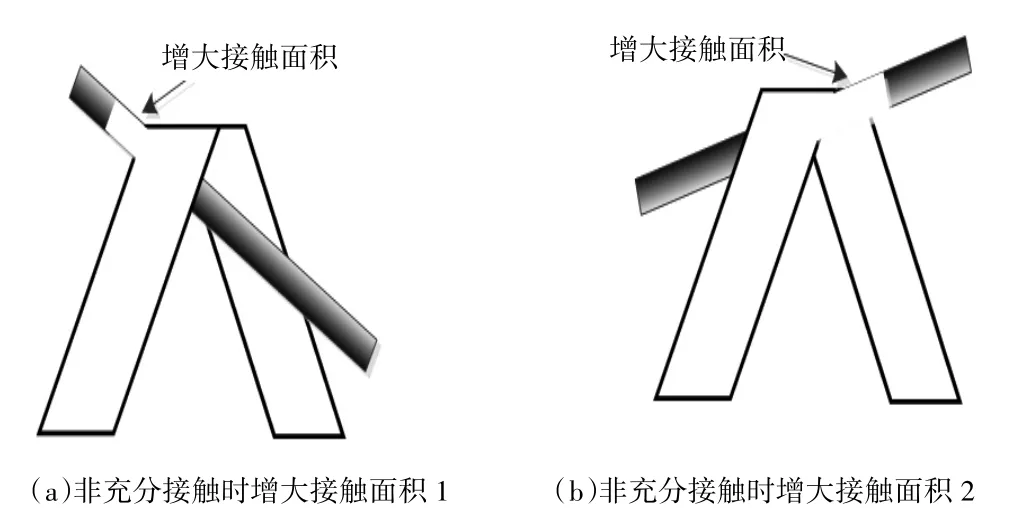
图4 在夹爪内部填充柔性物质以增大接触面积的示意图
由图4可以看出,在夹爪内部填充柔性材料,在重力作用下与高压线接触的部位发生形变,使得二者的接触面积增大,只要能够满足:
“连峰际天”的毕节,从“飞鸟不通”到县县通高速公路,再到推进加密高速公路网建设,实施“组组通”公路三年大决战,正与毕节全面小康的时间点契合。

就可以使得机器人保持相对静止,不沿着高压线滑落。
2 传动机构的设计
在完成夹爪设计的基础上,对机器人的传动机构进行设计,如图5所示。
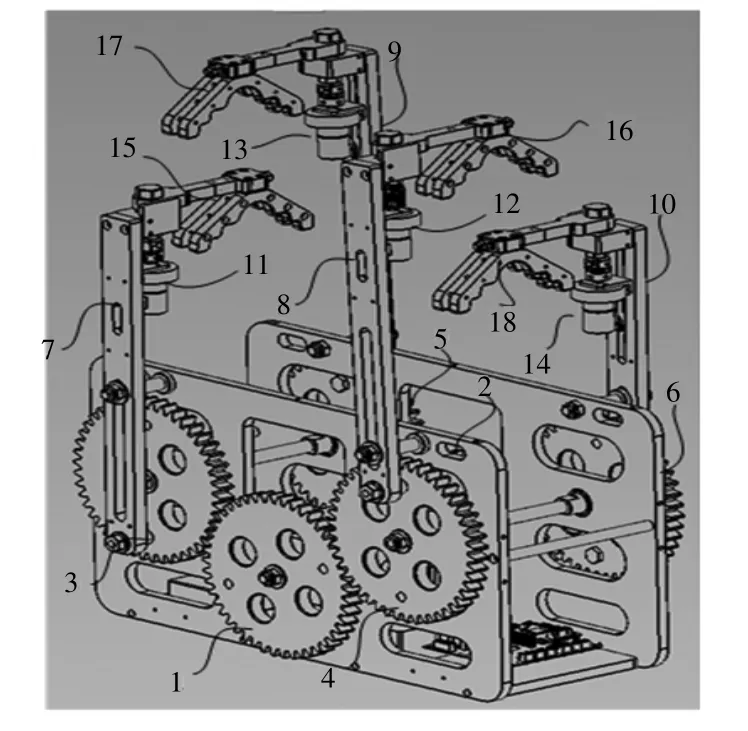
图5 机器人的传动机构示意图
图5中,轮1和轮2由减速电机所驱动,是主运动轮。通过精密齿轮的传动,轮1的动力被传递至轮3和轮4,轮2的动力被传递到轮5和轮6。轮3与轮5,轮4与轮6通过转轴相连接。轮3、4、5、6分别带动机械臂7、8、9、10运动,机械臂7与机械臂10的运动规律相同,机械臂8和机械臂9的运动规律相同,机械臂7、10与机械臂8、9的运动规律相反。在减速电机的带动下,根据三连杆原理使得两侧各有一个夹爪悬挂在高压线上,另外两个夹爪向前运行,形成位置的互补,保持机器人姿态的平衡。
由于钢锚的阻碍,需要设计旋转机构改变夹爪的位置,才能使机器人通过。图5中四个步进电机11、12、13、14可以分别控制夹爪15、16、17、18。当夹爪在轮子的带动下,离开高压线的一定距离不与高压线发生干涉时,步进电机使得夹爪由与高压线垂直状态变换为平行于高压线状态,至此完成了机器人传动机构的设计。
3 实验与分析
根据以上设计方案研制出高压线巡线机器人。机器人的侧板和底座等固件采用铝合金材料加工,用以减轻机器人的重量;由于机器人的机械臂与夹爪等部件需要承重,采用刚性材料加工;机器人的轮子由尼龙材质加工;机器人的主电机选用大扭矩减速电机,机器人的旋转机构选用单轴GM2020BY步进电机;机器人的控制器由STM32微处理器为核心组成。以此机器人为对象开展通过耐张线夹的实验,相关的实验参数如下。
3.1 实验参数
3.1.1 实验环境
在室内搭建高压线输电线模拟线路,模拟线路的长度为4.13 m,高度为0.78 m,形状类似“W”形,右半部分坡度较小,左半部分坡度较大,中间部分为耐张线夹,耐张线夹中间的钢锚使得机器人不能从高压线上方连续通过。耐张线夹与水平面之间角度是变化的,最大值约为40°。
3.1.2 夹爪参数
实验中夹爪内径被设计为25.9 mm,与单股高压线所匹配;中径被设计为28 mm,与并沟线夹所匹配;外径被设计为35 mm,与耐张线夹所匹配。在夹爪内部首先填充聚乙烯醇高分子材料,使得机器人在有坡度的高压线运行时,夹爪内部发生如图4所示的形变;接着在聚乙烯醇外部增加一层橡胶磨砂材质,进一步增大摩擦系数,增大夹爪与高压线之间的摩擦力。
3.1.3 机械臂运动参数
运动规律不同的轮子之间的相位相差180°,机器人运动速度的平均值为0.5 m/s。机器人运行至高压线上方大于0.06 m时不会与高压线发生干涉,此时夹爪可在旋转机构的作用下打开。
3.1.4 姿态测量系统参数
为了定量分析机器人越过耐张线夹的平衡性,采用MTi-30系列的惯性传感器,其运行中偏置稳定性为18°/h;运行时偏航角误差典型值为1°,俯仰角和倾斜角误差典型值为0.5°。将其安装在机器人的上,其位置如图6所示。MTi-30导航坐标系设置为X轴与高压线方向一致,X轴的正方向为机器人运行方向;Z轴垂直于地心,其正方向指向上方;Y轴根据右手定则确定即可。
3.2 机器人通过耐张线夹的实验结果
根据上述参数开展实验,从机器人准备通过耐张线夹开始,至完全通过耐张线夹后运动状态如图6所示。

图6 机器人通过耐张线夹的实验结果图
图6(a)中机器人准备开始通过耐张线夹,机器人整体均在钢锚右侧,2、3号夹爪悬挂高压线上,此时机器人处于倾斜状态。由于机器人的夹爪与耐张线夹吻合度较高,另一方面内部装有聚乙烯醇和橡胶磨砂材质,夹爪与高压线之间有足够的静摩擦力,使得机器人在与水平成30°倾斜角的高压线上保持稳定,不会沿着高压线下滑。图5(b)中机器人的1号夹爪在旋转机构的作用下由与高压线垂直状态转变成平行于高压线状态,在运动机构的作用下从侧面通过钢锚,此时仍是2、3号夹爪悬挂于高压线上,使机器人可以保持稳定。图5(c)中机器人的1号夹爪恢复到与高压线垂直状态,3号夹爪在由与高压线垂直状态转变成平行于高压线状态,在运动机构的作用下从侧面通过钢锚,此时2、3号夹爪悬挂高压线上,使机器人可以保持稳定。图6(d)中机器人的3号夹爪恢复到与高压线垂直状态,4号夹爪在由与高压线垂直状态转变成平行于高压线状态,在运动机构的作用下从侧面通过钢锚,此时2、3号夹爪悬挂高压线上,使机器人保持稳定。图6(e)中机器人的4号夹爪恢复到与高压线垂直状态,2号夹爪在由与高压线垂直状态转变成平行于高压线状态,在运动机构的作用下从侧面通过钢锚。此时由于结点左侧坡度原因,1号夹爪处于悬空状态,仅4号夹爪悬挂于高压线上,机器人仍可保持稳定。图6(f)中机器人完全通过钢锚,机器人整体均在结点左侧,2、3号夹爪悬挂高压线上,此时机器人处于倾斜状态,此时机器人保持稳定。
3.3 机器人通过耐张线夹时的平衡性测试
根据以上分析可知,机器人成功通过耐张线夹,为了进一步测试越过耐张线夹时的平衡性,通过MTi-30惯性传感器测量沿着X轴旋转的横滚角。为此开展多次实验,从中随机选取两次实验,得到机器人的横滚角的曲线,如图7所示。

图7 通过耐张线夹过程中机器人横滚角的曲线
由图7可知,机器人通过耐张线夹时间约为12 s。在图7(a)中,机器人横滚角正方向的最大值为9.23°。横滚角负方向的最大值为12.29°。由于横滚角为0°时,机器人不向任何方向倾斜,平衡性最好,因此取0°作为机器人横滚角理想期望值,那么图7(a)中横滚角的标准差约为6°;在图7(b)中,机器人横滚角正方向的最大值为18.92°,横滚角负方向的最大值为16.68°,图7(b)中标准差约为8°。对十次实验的结果进行分析可得,机器人横滚角的标准偏差的平均值约为7.5°。
在实验环境下,根据测试所知,当横滚角在20°之内时,机器人就可以稳定运行,因此,本设计的高压线巡线机器人在通过耐张线夹时具有较好的平衡性。
4 结束语
针对耐张线夹的尺寸与高压线不同使机器人的夹爪难以匹配,存在坡度使机器人有下滑风险,钢锚使机器人不能整体通过,设计一种可通过耐张线夹的电力巡检机器人。实验证表明,机器人的夹爪能够与耐张线夹吻合,可以在倾斜处运行而不下滑;在旋转机构的作用下,机器人能够逐步通过钢锚;在通过耐张线夹过程中,机器人沿着高压线方向横滚角的标准偏差约为7.5°。因此利用该方法,机器人能顺利通过耐张线夹并且平衡性较好,有助于该机器人长期稳定运行,节省人力物力并提高巡线效率。
猜你喜欢
智慧电力(2022年1期)2022-03-02
科技研究·理论版(2021年4期)2021-09-10
躬耕(2020年2期)2020-03-16
小学生作文(低年级适用)(2019年5期)2019-07-26
源流(2018年6期)2018-12-03
无人机(2018年1期)2018-07-05
读友·少年文学(清雅版)(2018年12期)2018-04-04
山东青年(2016年3期)2016-02-28