
密闭热室中的摄像机快换云台结构设计
2022-06-15 06:12:42徐爱群张学诚
机械设计与制造工程 2022年5期
李 聪,徐爱群,张学诚
(1.浙江科技学院机械与能源工程学院,浙江 杭州 310023)
(2.中移建设有限公司浙江分公司,浙江 杭州 310009)
1 快换云台设计方案
快换云台是一种在监控设备发生故障时实现远程快速更换的可拆卸云台,适用于高温高辐射的热室环境,保证监控设备长时间稳定运行。特殊的热室环境易使精密的监控设备产生腐蚀和信号不稳,需要不定期维修、更换,为解决这个问题,本文设计了一种结构稳固、耐高温、防氧化且能够实现快速更换的云台设备。快换云台主要包括快换和监控两个功能,快换是在云台装置上部件发生故障时,利用热室内机械臂等装置将故障云台取下,并将替换云台转运到热室中安装到云台固定底座上;监控是指通过调节云台的旋转角度实现对热室范围内的监控[1-3]。
基于快换云台装置的功能,结合水平旋转和垂直摆动二自由度进行总体设计[4-5]。二自由度旋转结构有两种:一种为偏航角在上、俯仰角在下的云台二自由度结构,如图1(a)所示;另一种为俯仰角在上、偏航角在下的云台二自由度结构,如图1(b)所示。两种类型的云台结构都可以完成监控要求。图1(a)所示的结构俯仰角大,监控范围大,受云台框体空间范围影响较小,但由于旋转轴承担整个云台的质量,稳定性较差,因此多用于轻型悬挂式的云台;图1(b)所示的结构由底部旋转座承担整个云台的质量,稳定性较高,承重能力较强。根据本文云台的实际使用要求,选择图1(a)所示的第一种快换云台旋转结构。
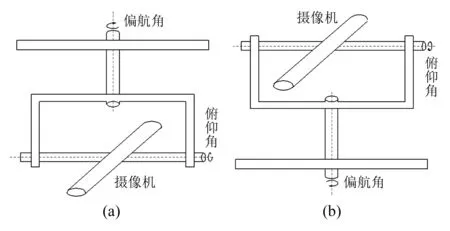
图1 云台二自由度结构示意图
根据上述设计原理及不同的功能要求,将快换云台装置分为上、中、下3个部分:上部实现机械手抓取和转运减振功能;中部根据云台安装位置和监控实际工况要求,左右旋转角度为0°~180°,上下旋转角度大于80°,且仰角小于俯角;底部设计成上下分离结构,使整个云台可以被提起,同时保证部件安装完成后整个云台电路接通。
2 云台设计
2.1 上部机构设计
上部机构具备机械臂抓取和减轻加速度影响的功能,为满足该要求,利用压缩弹簧、支撑板和销轴联接形成简单的减振机构,原理图如图2所示。考虑到机械臂抓取后运动时前后方向没有减振功能,将一自由度的机械结构进行叠加,形成二自由度减振机构,其原理图如图3所示。根据设计强度要求,采用06Cr19Ni10不锈钢材料进行上部机构零部件的加工,并参照设计原理图进行装配和结构优化。

图2 云台一自由度减振机构原理图
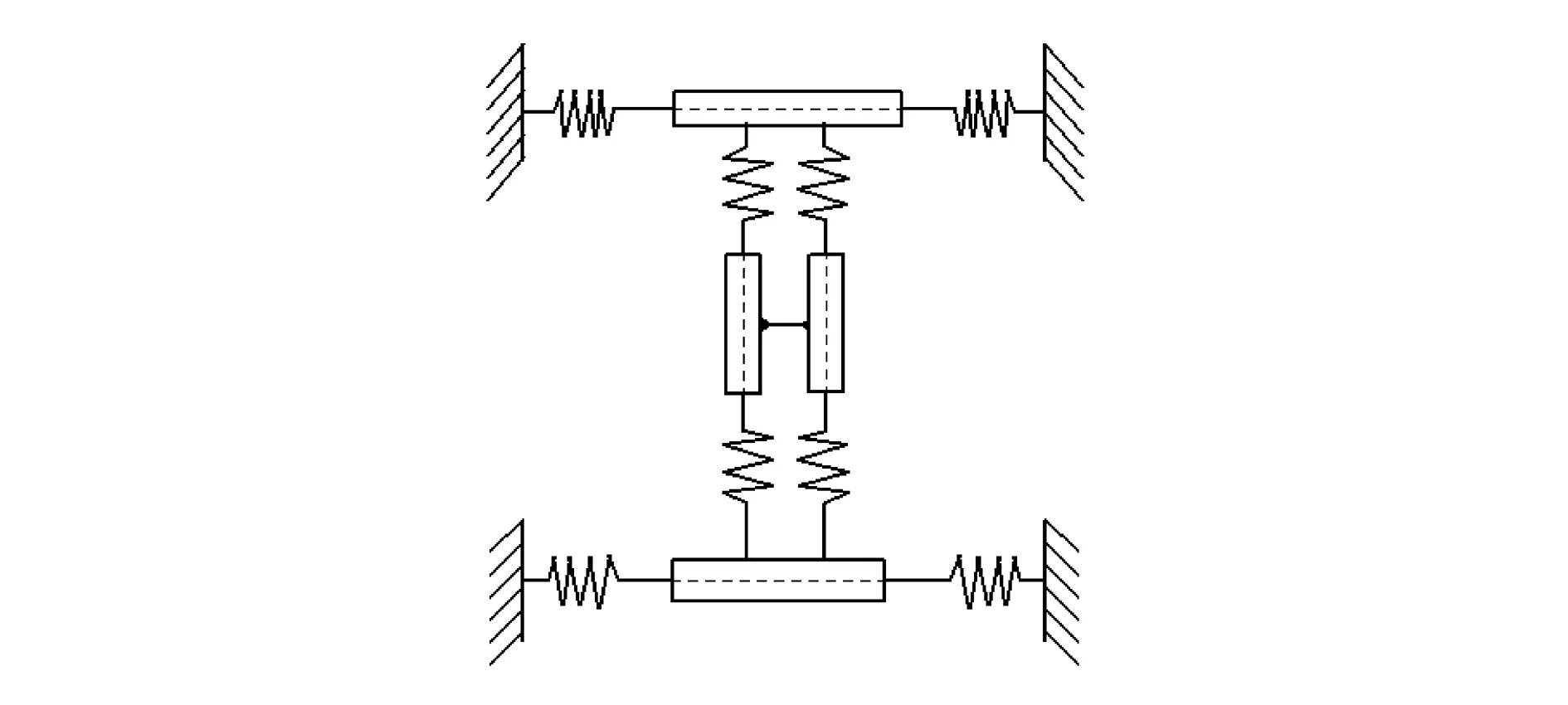
图3 云台上部二自由度减振机构原理图
由于上部机构的减振效果主要与压缩弹簧的减振效能有关,因此要对压缩弹簧的减振效能进行校核。云台装置设计总质量约为40 kg,在发生极限翻转即云台整体翻转90°的情况下,压缩弹簧所受力F=40×9.8=392 N。弹簧材料为0Cr19Ni10,其切变模量G为71 GPa,弹性模量为193 GPa。查机械云台设计手册,圆柱螺旋压缩弹簧性能参数见表1。
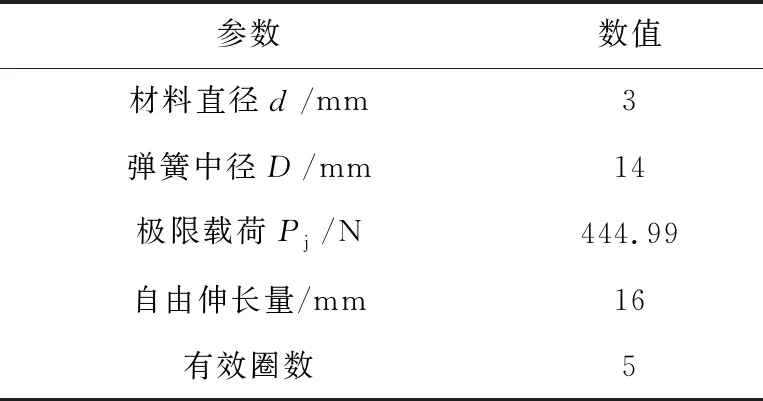
表1 弹簧性能参数表
根据压缩弹簧的相关参数计算减振机构的减振效能。圆柱螺旋压缩弹簧受到的载荷主要为轴向载荷,根据压缩弹簧变形公式得出弹簧最大轴向变形量fmax为:
(1)
式中:Fmax为轴向载荷;n为弹簧的有效圈数;C为旋绕比,C=D/d。
减振机构的缓冲效率η为:
(2)
式中:m为冲击物体质量;v为冲击物体与弹簧接触时的速度。
将压缩弹簧的基本参数代入式(1),得fmax≈3.74 mm。机械手转运速度约为0.2 m/s,代入式(2),可求得减振机构的减振效率η≈54.6%。当η为[0.5,1]时为系统减振效能较为理想的情况,由此可知,材料为0Cr19Ni10的常规压缩弹簧减振性能符合设计工况要求。
2.2 云台中部结构设计
2.2.1水平转动机构设计
水平转动模块主要由齿轮、电机和各种安装件组成,由电机提供动力,通过齿轮传动带动云台水平转动。电机的安装方式有两种:第一种为电机固定在云台底部,如图4(a)所示,电机安装在云台底部支架上,由电机提供动力,通过齿轮间啮合传动,带动云台中部旋转。第二种为电机与云台中部保持相对固定,如图4(b)所示,电机固定在云台中部平面安装板上,在云台底座固定的情况下,带动云台中部与底座形成相对转动。采用第一种安装方式时,云台中部和底部拔插的分离点在啮合齿轮上表面,电机和轴承发生故障时,在热室的密闭空间内更换维修不易。根据设计便利性要求,需要将电机及推力球轴承设计在可由机械臂一起取出的部位,第二种安装方式满足要求,其拔插分离点为啮合齿轮下表面,啮合齿轮中心轴与云台底座可以通过Y型键槽和Ⅰ销进行左、右方向的锁定,云台中部连同啮合齿轮可通过机械臂一起取出。因此第二种安装方式优于第一种。
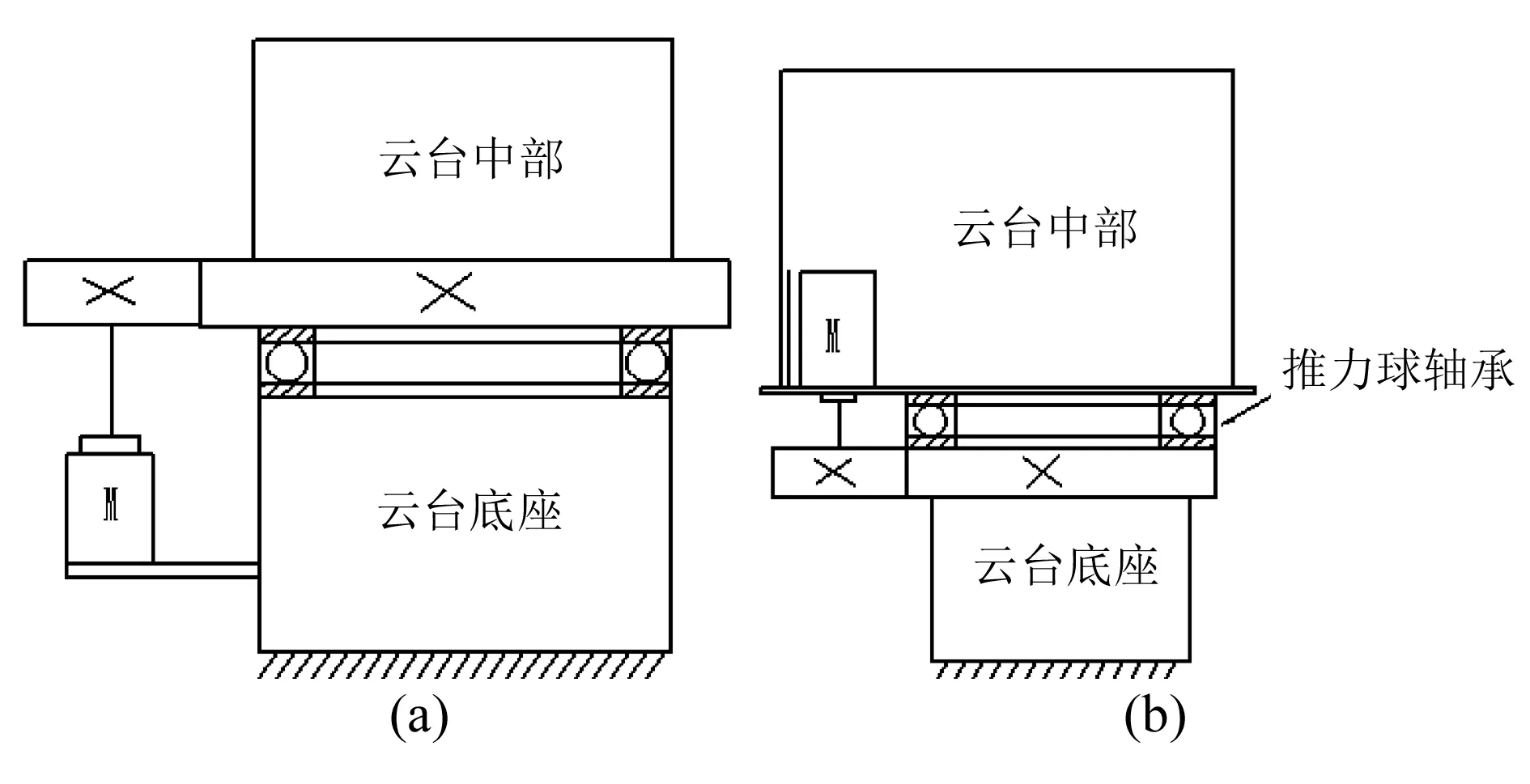
图4 云台水平旋转设计原理图
2.2.2上下摆动机构设计
基于二自由度云台框架设计上下摆动模块,上下摆动模块由电机、摆杆、丝杆、直线模组、直齿轮和若干轴承组成。由电机带动直齿轮转动,直齿轮与丝杆连接,从而带动丝杆旋转进行上下运动,丝杆螺母伸出机构与摆杆圆柱槽以移动副相连,带动摆杆摆动,完成摄像机的上下摆动。
云台上下摆动机构简化原理图如图5所示。根据平面自由度公式确定机构是否有一自由度的确定运动:
图5 云台上下摆动机构原理图
F=3n-2PL-PH
(3)
式中:F为机构自由度数;n1为机构中的活动构件数;PL为机构中的低副数;PH为机构中的高副数。
由图5可知,以电机为主动件,n1=4,PL=5,PH=1。由式(3)可以得出机构的自由度为1,可知机构有确定的相对运动。
云台上下摆动机构的运动状态如图6所示。图中电机为驱动装置,与直齿轮连接,当C点为丝杆初始位置时,螺母安装板的位置与直齿轮安装位置的距离为y0,y0在云台上下摆动机构运动过程中保持不变,BC=B1C1=x0=50 mm;B点为摆杆槽中圆柱销的位置;A点为摆杆旋转轴与摄像机固定连接处,β1为摄像机的仰角,β2为摄像机的俯角,摄像机运动角度β=β1+β2,A点与C点之间距离AC=X=100 mm,C点与A点的高度差y1为35 mm。
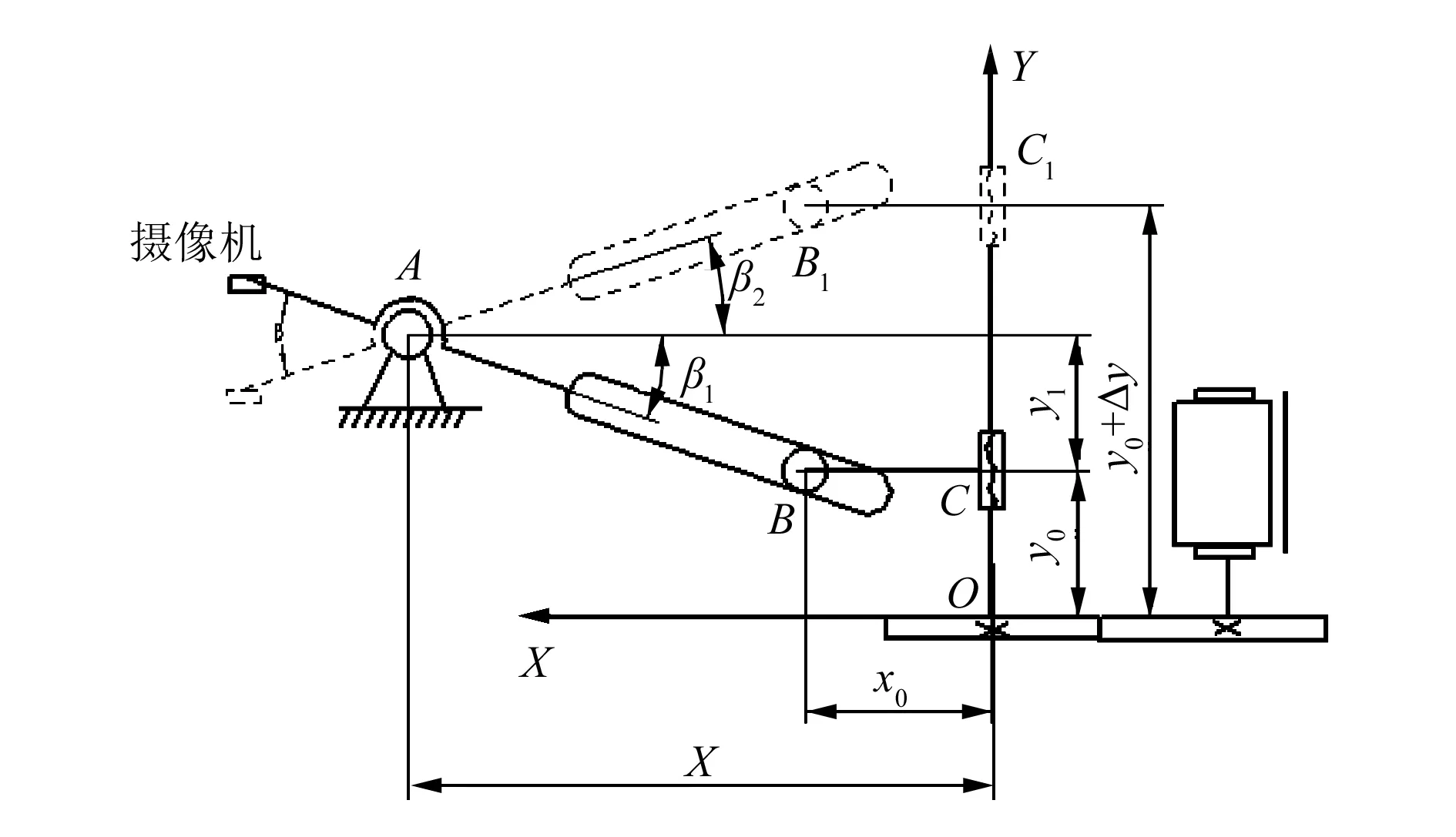
图6 云台上下摆动状态
以丝杆与齿轮链接处为坐标原点O、CB方向为X轴正方向、CC1方向为Y轴正方向建立直角坐标系,在丝杆旋转上升过程中,β1和β2随着丝杆螺母行程Δy变化,有如下关系:
(4)
(5)
根据摄像机监控范围需求,在极限位置处摄像机俯角应大于仰角,即β2>β1,且设计时俯仰角不小于80°。由于云台装置架构总体高度约250 mm,因此选择长度为200 mm、有效行程Δy为90 mm的丝杆,通过丝杆的旋转带动螺母上下移动,丝杆螺母伸出机构端头处滚动销与摆杆通过键槽连接,则丝杆螺母的移动带动了摆杆的摆动。
当摆杆处于水平位置时,Δy=y1=35 mm,AB=X-x0=50 mm,代入式(4)中求得β1=35.8°。
当摆杆处于上极限位置时,Δy=90 mm,代入式(5)求得β2≈47.7°,β2>β1,且β1+β2=83.5°>80°,符合设计要求。
2.3 底部快换结构设计
底部快换结构由行插导向块、相机导向键和底座安装板组成,支撑着云台上部和中部结构实现电路接通和保持整个云台稳定的功能。为此设计行插轨道,为降低行插难度及保证中部和底部不发生平面转动,在行插轨道上部设计一个行插坡口。将行插导向块上的坡度设计为45°,如图7所示, Y型上坡口宽度为40 mm,云台上部和中部的质量为35 kg,底部行插导向块上两个Y型坡口处单个可承受压力FY=125 N,行插导向块的材质为06Cr19Ni10,其表面摩擦系数μ=0.12,Y型沟槽坡口单个表面与相机导向键之间的瞬时垂直压力FN=FYcos45°=125×cos45°≈88.4 N,单个最大静摩擦力fjmax=μFN=0.12×88.4=10.6 N,重力沿坡面分力为FP=125×sin45°≈88.4 N,由于FP>fjmax,因此机构不会发生自锁,能够顺利实现行插。

图7 45°坡度底部设计前视图
相机导向键与高精密轴承的中间旋转部分固定连接,因此由与Y型坡口斜面产生的侧压力就可以使高精密轴承转动,避免相机导向键圆弧部与坡口斜面因挤压力大形成疲劳剥落,提高零部件使用寿命。相机导向键与底部行插导向块的接触面为圆弧面,若坡度设计小会导致FN变大,摩擦力增大,造成相机圆弧面磨损;若坡度过大会导致Y型坡口宽度过小,给机械臂定位增加了难度。云台中部与底部拔插结构剖视图如图8所示。
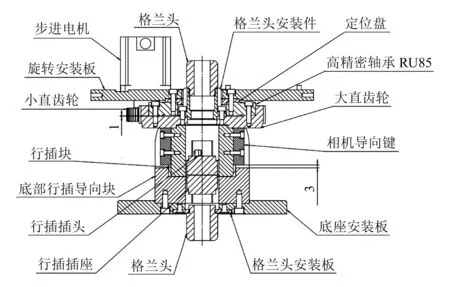
图8 底部装配结构剖视图
2.4 运行方式
云台装置带动摄像机上下摆动过程:电机接收信号转动,经过齿轮将动力传送给丝杆,丝杆旋转,螺母向上运行带动螺母安装板和滑块一起向上运行,带动摆杆旋转,摄像机也随之转动,如图9所示。

图9 云台装置监控三维图
云台装置左右旋转过程:电机接收信号带动小齿轮旋转,大直齿轮与导向块固定不动,小直齿轮带动固定在轴承上的云台中上部旋转。
3 云台ADAMS运动仿真
3.1 三维模型建立
利用SolidWorks对云台进行三维建模后,由于零件较多,首先对模型进行简化,如图10所示,然后另存为STP格式,导入到ADAMS软件中进行运动仿真[6-8]。导入之前对运行环境进行设置,如选择笛卡尔坐标系,单位设定为标准单位,重力加速度设置为9.8 m/s2,重力加速度方向为Z轴负方向。由于是对云台装置上下摆动运动进行仿真,因此将其他部件去除,并忽略轴承、螺钉等零件和连接处的摩擦力。
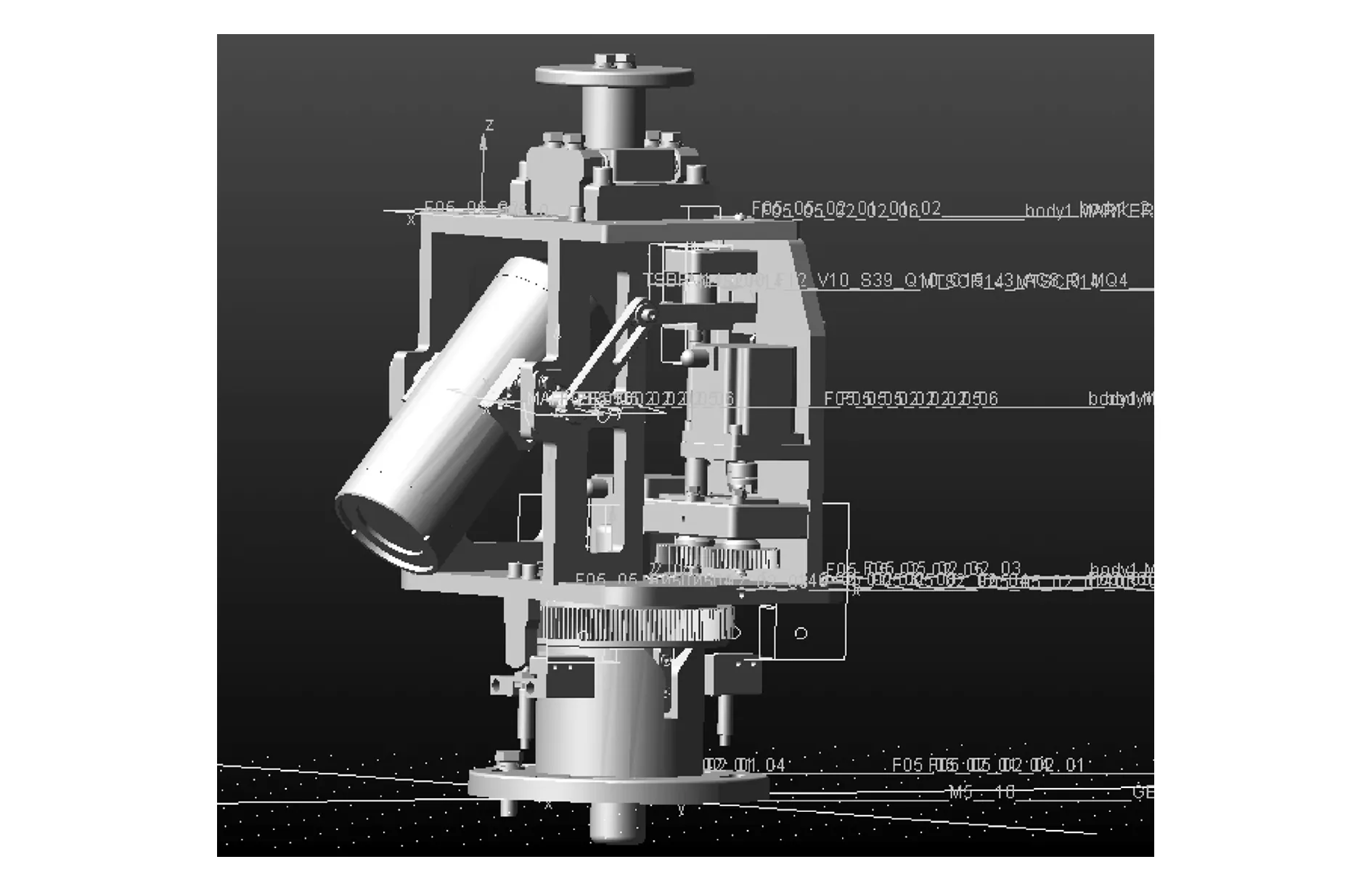
图10 云台三维模型
模型导入ADAMS后,根据设计要求,除电机外所有的零件材料都选为06Cr19Ni10,在一边支撑板上添加固定副,支撑板与销轴间添加旋转副;摆杆沟槽与轴套连接处添加移动副和旋转副,螺母与丝杆之间添加螺旋副和移动副,并根据丝杆螺距3 mm设置螺旋副节圆为3;两个直齿轮之间添加齿轮副,最后添加驱动。根据求出的齿轮转速为70 r/min,将换算结果420(°)/s编辑到驱动函数中,点击驱动motion中modify,然后将type改成velocity并在function(time)中输入驱动函数:if(time-30:-420d,0,420d)。
3.2 仿真结果分析
设置仿真时长为60 s,仿真步数为500,然后点击仿真按钮,得到丝杆的位置曲线、镜头角速度和角加速度与时间的关系曲线,仿真结果如图11所示。
从图11(a)可以看出,丝杆位移曲线的最大值为310 mm,在30 s时刻达到最小值220 mm,差值约90 mm,与丝杆的有效行程相符,丝杆的位移曲线呈线性,无位移不变或者突变情况出现,说明丝杆运行平稳;从图11(b)可以看出,摄像机镜头上下摆动角速度在刚开始的时候存在突变,达到1.8(°)/s,但速度曲线总体比较平滑,并在16 s时达到最大值4.2(°)/s,与设计值上下摆动角速度相符;从图11(c)可以看出,摄像机镜头上下摆动角速度变化平缓连贯,在一个周期中,角加速度4次达到最大值,第一次在8 s时达到最大值0.19(°)/s2,在16 s时加速度为0,即镜头摆动到水平方向时角速度达到最大值。

图11 云台上下摆动仿真分析曲线
综上,整个运动过程无剧烈冲击,运行平稳可靠,仿真结果与丝杆选型和上下摆动角速度设计值相符,满足设计要求。
4 实验测试
设计的云台装置产品完成组装调试后进行二周的现场测试,根据测试数据判断产品设计的合理性。若1 min之内完成行插,评定为合格,未完成即为不合格。测试结果见表2。
由表2可以看出,云台装置结构完整性和通电合格率为100%,说明结构稳定性高;进行旋转实验时,通过监控显示器能够全面观察到热室内部情况,且没有出现无法控制的情况;进行拔插实验时,在不同的环境下,拔插结构合格率达到100%,通电后旋转运行合格率达到99%;在有电磁辐射的情况下,电机能够正常运行,监控画面清晰。个别次实验未完成通电是因为拔插次数过多,快插插头接触不良所致。测试结果符合甲方和设计要求,验证了设计的合理性。
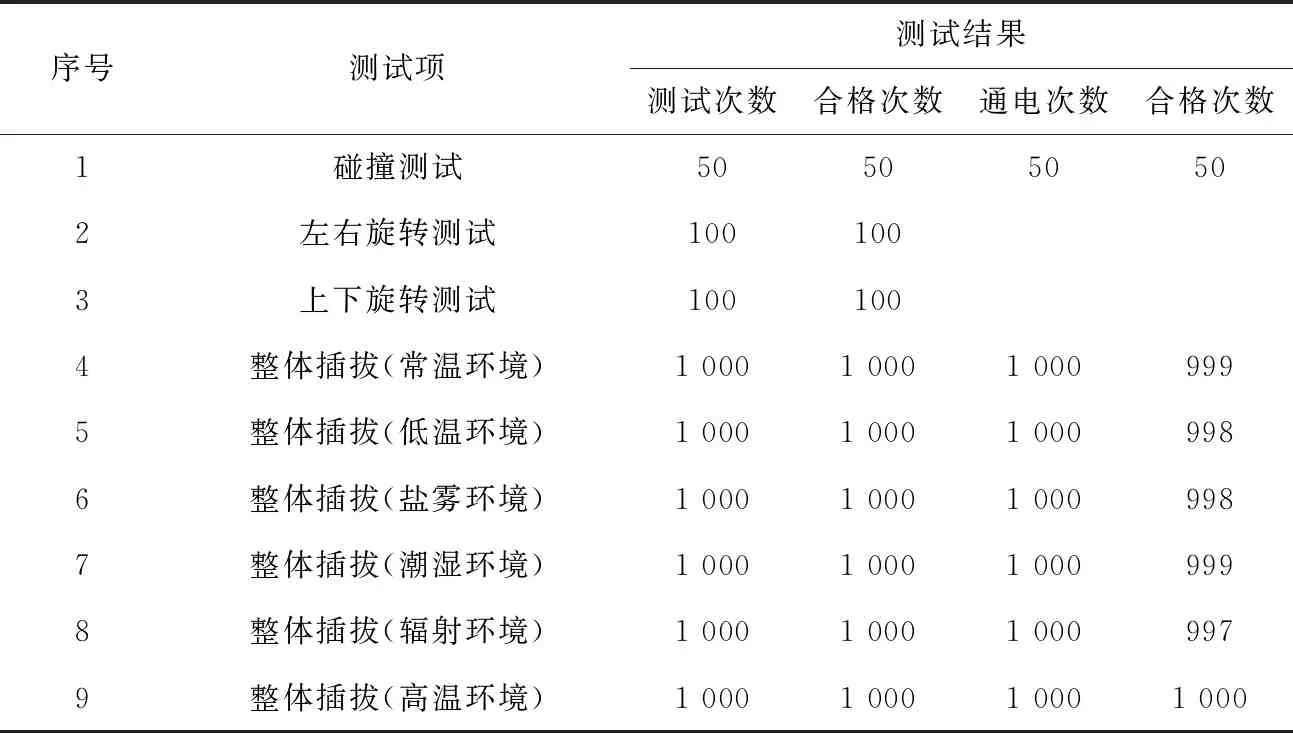
表2 快换云台装置测试记录表
5 结束语
本文设计的密闭热室环境中摄像机快换云台装置,采用耐腐蚀无静电的不锈钢材料作为整个云台的主体材料,电子元件选择耐腐蚀无静电型且设计了防护罩,延长了装置的使用寿命,降低了云台摄像机故障率。云台上部设计了易于供机械臂抓取的结构,同时考虑到转运过程中的平稳性,增加了弹簧减振机构。除此之外,在底部增添了便捷拔插机构,设计了能够实现云台快换的结构,给检修、更换工作带来极大的便利,提高了企业运行效率。
猜你喜欢
中国设备工程(2024年9期)2024-05-13 06:05:08
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
现代装饰(2022年6期)2022-12-17 01:10:30
现代装饰(2022年6期)2022-12-17 01:09:42
橡塑技术与装备(2022年10期)2022-10-03 07:39:14
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
摄影之友(影像视觉)(2020年2期)2021-01-14 05:34:28
塑料包装(2019年6期)2020-01-15 07:55:48
设备管理与维修(2019年14期)2019-06-16 02:02:32
电子制作(2019年23期)2019-02-23 13:21:16
