电控机械式自动变速器的智能控制和仿真设计
2022-06-04 14:19边洪宁李永明张燕
粘接 2022年5期
边洪宁 李永明 张燕


摘 要:以汽车的换挡平顺性和舒适度为出发点,对电控机械式自动变速器的传动特点进行研究探讨,通过离合器的控制方法以及工作特性结合特定的规律来提高电控机械式自动变速器的换挡性能和起步稳定性,减少换挡操作,改善汽车的平顺性和舒适性,检验智能换挡控制的合理性。
关键词:电控机械式;自动变速器;控制系统;仿真
中图分类号:U463.212 文献标识码:A 文章编号:1001-5922(2022)05-0095-05
Intelligent control and simulation design of electronically controlled mechanical automatic transmission
Abstract: Starting from the smoothness and comfort of the automobile, the transmission characteristics of the electronically controlled mechanical automatic transmission are researched and discussed. The control method and working characteristics of the clutch are combined with specific laws to study and improve the electronically controlled mechanical automatic transmission. Shift performance and starting stability, reduce shift operations, improve the ride comfort and comfort of the car, and test the rationality of intelligent shift control.
Key words: electronically controlled mechanical;automatic transmission;control system;simulation
随着我国的经济发展和科技的进步,人们对汽车配置要求也越来越高。自动变速器可以消除驾驶者换挡操作技术的差异,提高开车的舒适性和安全性,所以自动变速器发展是汽车发展市场不可逆转的趋势。自动变速器具有较强的自适应能力和行车安全性,以及较好的行驶平稳性,弥补很多机械式变速器的不足,非常适合我国汽车工业的发展现实,是近几年迅速发展起来的一种新型自动变速技术,具有良好的产业前景。为了提高汽车换挡的平顺性和舒适度,促进汽车工业进一步发展,通过车辆经济性和动力性所占比例的分析,提出经济性对换挡点和权衡动力性进行综合系统控制的一种方法。创建汽车电控机械式自动变速系统的模型进行研究。
1 电控机械式自动变速器的智能控制系统 基本结构
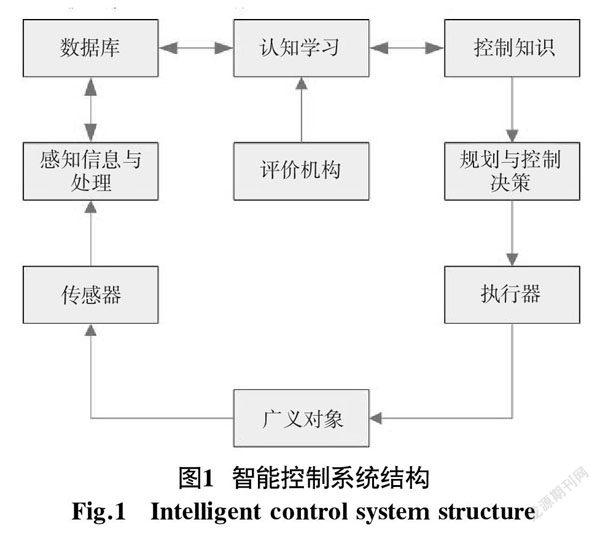
与传统的控制器相比较,控制器内部结构复杂,加强功能性抗干扰能力是智能控制器的主要所在。简单的智能控制系统可以分为智能控制器和外界工作环境2部分,智能控制器由处理模块、认知学习、信息识别、控制决策以及最重要的数据库等组成;而外界环境则由传感器、执行器、被控目标和被外界信号干扰对系统产生的不稳定因素组成。控制系统机构如图1所示。
现在汽车智能控制系统研究越来越广泛,成为汽车控制系统的主流。当前社会上智能控制方法的类型越来越多,比如神经网络控制,模糊控制等,因此在当前市面上的应用上,什么方法最有效要根据实际控制系统的条件,被控制的对象的优点,目的及要求等因素来考虑。
2 自动变速器分类
市面上很多不同型号的自动变速器,不同品牌的自动变速器在构造上、形式上都有很大的区别。
2.1 按照汽车驱动方式分类
按汽车的驱动方式的不同,自动变速器可分为2种,这2种自动变速器在布置上,构造上有较大的差异,一种是前驱动,另一种是后驱动。后驱动除了与前驱动是一样的组成部分外,前驱动在自动变速器的内部还装有差速器。后驱动的轴向尺寸比较大,因为齿轮变速器和变扭器的输出轴以及输入轴在同一条轴线上,在齿轮变速器的下方底壳内布置阀板总成。
前驱动自动变速器的汽车发动机有横向和纵向2种:横向发动机的前驱动自动变速器,要求有比较小的轴向尺寸,因为汽车的横向尺寸有限制,纵向发动机只是在后边加了一个差速器,两者的放置和构造都差不多。因此,为了减少变速器总体的轴向尺寸,增加了變速器的高度,通常将输出、输入轴设计为两个轴线,齿轮变速器与变扭器的输出轴安在下方,输入轴安放在上方。
2.2 按照控制方式分类
变速器的控制方式分为2种:一是电子控制方式;二是液力控制。电子控制方式是结合电脑来进行的,电子控制自动变速器是实现自动换挡,将车速和节气门开度、转速、水温、变速器的油温、液压等参数转变为信号,通过传感器获得信号后,把信号输进电脑。电脑根据设定好的换挡规律、液压、电子换挡电磁阀等发出控制信号,两个电磁阀再将电脑的控制信号转化为液压控制的信号,阀板的各个控制阀门根据信号,执行机构的动作,来实现自动换挡。液力变速器是如何实现目标的?首先需要把节气门开度和车速,这两个数据转变为液压的控制信号,在汽车行驶的时候,通过机械控制的手段获得信号,然后控制换挡操作系统的动作,通过多个控制阀门根据这些信号的大小,结合设定好的规律,实现目标。
2.3 按照齿轮变速器的类型分类
市面上大多数轿车所采用的是行星齿轮变速器,还有一种普通齿轮的自动变速器。行星齿轮变速器这款自动变速器可以获得很大值的传动比,内部结构也紧凑,适用于大众轿车;普通齿轮这款变速器的传动最大值很小,体积还很大,只是有特定的几款少数车在使用。
2.4 按照对发动机的控制方式分类
控制方式可以分为柔性控制法和刚性控制法,“电子油门”就是很典型的柔性控制法的例子,在柔性控制法结构中,只是控制相连传感器,油门和加速踏板是分开的,将开车人的意图转换为信号,从而输给电控单元。汽车在换挡过程中,发动机是按编制的指令通过油门执行动作控制的,而汽车正常行驶的过程中则是通过电控单元按照设定好的比例来控制油门,所以国内外研究较多的是柔性控制法结构。刚性控制法则是存在缺陷的,因为“巡航”功能不能在刚性结构内实现,所以目前市面上的自动变速汽车中大多没有刚性结构,刚性不需要外加油门执行,加速油门和踏板两者之间的机械连接,为了实现自动变速这个目的,在换挡中必须使用某种附加的方式控制发动机。
2.5 按照执行系统的动力源驱动类型分类
动力驱动类型分为3种,全电式执行系统,电控液动式执行系统,电控气动式执行系统,3种执行系统的方式都各有不同,分类如图2所示。
2.6 电控机械式自动变速器的智能系统控制特点
飞数值的广义模型和含有算法以及智能模型的数学模型展示的混合控制过程来是用知识来表示智能控制,使用定量、定性被循环控制与两相结合的多种控制方式,对被控制的动态进行识别。
智能控制具有模拟人类学习、感知周围环境、推理和逻辑思维等特点,此方法是高级阶段的控制理论,而电控机械式自动变速器系统中有没有办法运用准确的数学来表达的人为因素影响,存在控制对象的时变性和非线性,同时规定控制结果和响应快速与目标参数没有差错,传统控制都有着相当困难不好解决的多重复杂问题,对于参数的未知、模型结构都了解的不对的情况下,传统控制方法就很难使用。根据以上原因使得传统的控制方法很难实现对电控机械式自动变速器系统的控制,要解决传统控制带来的复杂问题,就很需要使用达到高级理论的智能控制方法,因此,电控机械式自动变速器系统智能控制较容易适用在模糊性、不确定性、高度非线性、不完全性等比较复杂多变的控制系统中。为了进一步完善改良控制系统的性能,在控制系统对很复杂的任务和分散的信息有自动协调组织的能力时,可通过规定的取值范围,保证稳定性的方式来改变控制器的参数,来解决参数得不到改变时所面对的情况。
2.7 电控机械式自动变速器系统智能控制算法
2.7.1 自适应算法
自适应控制算法是由Marsik等学者所提出的不需要辨识的自适应控制算法,不需要辨别过程参数,只需在线实时检测过程实际输出数值和期望输出数值就能形成自适应控制,所以这类自适应控制器还有很多性能需大幅度的提高。自适应算法可以辨识系统,根据控制数值来计划控制规律。结合以上方法需要在每个收集周期之内得出一些复杂的数值,有辨别所获得的数学模型的准确性无法保证,所以自适应算法的应用受到了限制。
2.7.2 智能控制算法
当今社会上有一些具有自适应算法能力的PID控制算法,使用的是通过系统辨别的方法,算法上极其复杂,运算量较大,并且只适合小范围内的模型不确定因素,但是在某些程度上解决了一些不确定的问题。深入研究后发现,为了使其能有更好的适应能力,可以用PID来改写神经元中的变量,达到最佳效果。直流电机是传统PID控制的,使用的闭环控制对控制结果进行侦查测验,可以最大化减少自动纠偏能力比较弱,精确度低等缺点,对系统参数变化的干扰和外界因素达到最大抑制。直流电机建立准确的数学模型非常困难,会失去其本应有的稳定性和自带的调节功能。
单神经元自适应算法可以在相当短的时间内达到稳定效果,使用过程很轻松,可以对PSD进行自适应、整定,不必要对参数进行修正处理,能节省很多时间,并且单神经元自适应PSD控制器能很好的将程序下载到车辆的主系统中。
3 电控机械式自动变速器原理
电控机械式自动变速器是21世纪正在研究的主流汽车产业,根据驾驶员的目的进行自动换挡控制行为以及结合汽车的驾驶状况,路面状况是它的工作原理。为了达到离合器、变速器和发动机的最佳匹配,来获得更好的行驶性能、迅速换挡和平稳起步的能力。在发动机的车速、转速传感器实时监控汽车的行驶状况和发动机状态下,驾驶人员通过踩加速踏板,变速杆向被电控单元表达目的,将得到的信号输进去,电控单元按预先设计好的有熟练驾驶员的驾驶规律对换挡、节气门开度结合以及离合器进行控制,原理如图3所示。
4 电控机械式自动变速器系统换挡仿真模型 创建
4.1 创建汽车模型
汽车运行过程中的驱动特点是根据设立汽车的动力学模型反映的,结合汽车受力,汽车在运行过程中的行动阻力和驱动设立一个平衡方程为:
Ft=Fr
式中:Fr为行驶时的阻力;Ft为汽车的驱动力。
汽车在运行时的阻力主要是坡道阻力Fi、滚动时的阻力Ff、加速时的阻力Ft及空气阻力Fw,汽车在发动时遇到的力和运行时遇到的力两者的方程设为:
Fr=Ff+Fw+Fj+Fi
4.2 创建非线性模型
正常工作时所用的离合器都是常闭的,汽车压盘和分离轴承杆为膜片,膜片在分离杠杆以及压紧弹簧之间有两重作用,是动盘使用磨损后还能继续使用。根据这些可以看出,创建电控机械式自动变速器系统模型首先要创建离合器模型,创建结合一体模型。
4.3 创建传动性模型
离合器传动方程为:
Te-Tc=Je(dwe/dt)
Te-Tr=J(dwc/dt)
式中:Tr为车辆道路阻力矩;Tc是汽车离合器摩擦传递力矩;we为汽车行驶中的空气阻力矩;Tc为汽车发动机中的输出转矩;Je为汽车发动机行驶的惯量;wc为制动力矩。
4.4 創建离合器模型
离合器摩擦过程中的相对摩擦肯定会对摩擦系数产生影响,使得摩擦片会出现一定变形、磨损以及发烫,可以把动态摩擦系数忽略,从而更好的实现离合器的过渡,清楚考虑在离合器传递过程中的输出力矩所带来的影响。通过数据设的方程为:
ud=(a+b)e-cu+d
摩擦表面和离合器产生的动态摩擦系数为:
uds=a-bu-ae+d
式中:a,b,c为常数。
创建离合器的模型主要目的是得到汽车载荷变化和输入力矩的变化具有相关关系的,也是为了体现离合器自己的传递特点和汽车载荷并没有太大的关系。
5 电控机械式自动变速器系统仿真实验
5.1 电控机械式自动变速离合器实验
电控机械式自动变速器系统是一个标准的组件系统,原型是dsPACE的组件系统,将汽车的传动系统和仿真机之间建立连接,这样就可以把它作为实时仿真机使用。快速控制原型系统中的基础是机械结构,支撑汽车的传动系统架构,快速控制系统原型这两样是最主要的存在,前者分为电机支架和总装图,后者是换挡结构和离合器总成。自动变速系统控制的工作原理:系统的大脑为处理器,在直流电机和执行构造同时控制使得离合器运动起来的同时,把搜索集合到的有关的信号经过处理器面板中的运行方式算法获得直流电机的电压控制。创建系统原型测试的主要目标,测试验证离合器在滑动摩擦控制算法中的有效性,以及试验汽车在接受到正确的指令动作时,同时在离合器在換挡、刹车与起步的情况下是否能够完成。
在电控机械式自动变速系统中要紧的比如离合器的运作逻辑,离合器的分离、处理,信号的收集等,工作流程为:初始步骤—采集和管理信号—判断离合运作逻辑—分离离合—完成换挡—结合离合—完成退出—结束。
在通用试验软件中创建调试试验的周围环境,可以从此环境中轻松获得收集数据和调整参数。离合器运作逻辑是正确的,等于说电控机械式自动变速器系统的运作逻辑是没有问题的,是正确的。
5.2 快起步控制离合器
汽车正常起步,节气门也正常,在离合器主盘和从盘的转盘速度一致后,离合器速度变快有快—正常—快的规律,在汽车从、动两盘同时以及运作之前,离合器速度正常,离合器主盘从盘步伐一致之前,速度在数值范围内中间部分。汽车的发动机转速在规定数值时,车辆起步平稳,使用正常。
5.3 慢起步控制离合器
汽车平稳起步时,节气门开度也比较小的话,在汽车从动盘,主动盘的步伐一致时,汽车开始运作并离合器连接速度比较慢。两盘转盘速度一致后,离合器会快速整合到一起,在离合器主动盘、从动盘同步之前,离合器速度的数值不变化。在此间过程中的结合有快—慢—快的规律,汽车发动机的转速在一定数值时,起步平稳,车速变化比较慢。
6 电控机械式自动变速器系统智能控制仿真 验证
直流电机的参数为:La=0.088;G=1 000;Ra=0.036 1;D=0.029 2;La×Jm=0.076 57;Ra×Jm=0.031 407。
在电控机械式自动变速器换挡过程中,离合器分为3种:摩擦部件结合状态、摩擦部件分离状态、滑动摩擦状态。根据阶跃函数,模拟3种状态分别进行试验,设定初始函数为1,时间为5 s,函数值为2时,时间为10 s,试验证明单神经元算法是有系统稳定能力、大的自学能力、响应速度快这3大优点。单神经元算法在系统稳定性、学习能力、组织能力3大方面都有较大的改善,比传统算法要高出很多优势,单神经元控制器在2 s内就可以做到无静差、无超调、稳定值、震荡时间短,在很短时间就能安稳下来。因此单神经元算法是最适合应用在离合器的执行构造控制算法中。
7 结语
随着社会的发展与进步,汽车工业的发展也是取得巨大的进步,汽车换挡也从当初的手动变速换到了现在大面积使用的自动变速的车,自动变速的车成为了当今社会的主流趋势。各大汽车品牌汽车工厂都在研究这些功能以求进步,通过本文的仿真模型创建及试验可以证明单神经元算法的可行性,获得比较明显的进步,能更好的应用在当今社会的汽车工业。
【参考文献】
[1]张秀秀.电控机械式自动变速器智能控制与仿真的研究[D].兰州:兰州理工大学,2012.
[2]曹晓雷,姚鑫.汽车电控机械式自动变速器微机控制系统算法研究分析[J].机械设计与制造工程,2017,46(10):42-45.
[3]常保利.电控机械式自动变速器离合器执行机构的智能控制策略[J].陕西交通职业技术学院学报,2018(3):39-42.
[4]田孝云.电控机械式自动变速器智能控制技术研究[D].陕西:长安大学,2012.
[5]朱辉.纯电动汽车交流无法充电故障诊断分析[J].粘接,2020,41(3):170-174.
[6]于丽丽.基于神经网络的汽车电控发动机故障诊断分析[J].粘接,2020,42(6):167-170.
[7]周英超,常思勤,李波.电控机械式自动变速器时序重叠换挡系统设计与研究[J].中国机械工程,2018,29(11):1 289-1 296.
[8]曹晓雷,姚鑫.汽车电控机械式自动变速器微机控制系统算法研究分析[J].机械设计与制造工程,2017,46(10):42-45.
收稿日期:2021-10-03;修回日期:2022-04-22
作者简介:边洪宁(1987-),女,硕士,副教授,研究方向:自动化、飞机机电设备。
猜你喜欢
文艺生活·中旬刊(2016年12期)2017-01-18
东方教育(2016年9期)2017-01-17
商情(2016年42期)2016-12-23
软件导刊(2016年11期)2016-12-22
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03