
采用AFSA算法的燃料电池车混合度的能量优化
2022-05-31 01:13:50汤世炎陈丽
电脑知识与技术 2022年11期
关键词:燃料电池
汤世炎 陈丽



摘要:随着能源危机的日趋严重,氢能源燃料电池车凭借着清洁、高效、无污染等优点得到了社会的高度关注。但是由于我国加氢站的体系并不完善,存在着基础建设的不足,相关流程的不健全,无法规模化地制造氢能源等问题,导致氢能源的成本远远高于石油。为了解决这一问题,文章使用人工鱼群算法对建立的目标函数进行优化,并根据各性能指标的权重关系选择最佳混合度,并在仿真平台ADVISOR2002上进行验证。
关键词:燃料电池;人工鱼群算法;混合度
中图分类号:TM911 文献标识码:A
文章编号:1009-3044(2022)11-0088-04
1 引言
近年来,随着现代化和工业化的到来,能源危机、空气污染日趋严重,全球各国正大力发展新能源技术[1]。燃料电池凭借着零排放、高效率、清洁等优点正逐渐成为未来交通运输业能源替代的理想解决方案[2]。但是在实际工程中,燃料电池在汽车的开发利用下仍然存在不足,首先燃料电池无法单独作为能源,因为其动态响应能力较差,无法面对各种突发情况[3]。其次燃料电池汽车性能方面,单一的指标是无法评价汽车的性能优劣,而汽车的经济性和动力性之间的关系是呈负相关的[4],研究者们提高整车的经济性势必会造成分动力性能的下降,反之亦然。因此,为了提升整车的性能,研究动力性与经济性之间的权重关系是十分必要的[5]。
2 算法设计
2.1 人工鱼群算法
在自然世界里,鱼类可以通过自身行为找到水域中食物浓度高的地方,所以大量聚集鱼的区域往往食物最多,人工鱼群算法就是通过观察这一现象,模拟鱼群的觅食、聚群和追尾等行为,从而达到最优。以下是鱼的几种典型行为:
觅食行为:通常鱼会在水域中随机活动,但是当它发现食物时,就会快速朝着食物浓度高的地方移动。通过模拟这一行为,算法在初始阶段会随机选择一个位置,随后对两个位置进行比较,移动到较优的位置,然后继续执行该操作,直到达到尝试次数。
聚群行为:鱼在水域中生活时为了确保生存通常会聚集成群,分析这一行为,算法首先会判断附近人工鱼的数量,然后通过对位置中心状态评估来决定是否移动。
追尾行为:在水域生活中,鱼会尾随附近已经找到食物的伙伴从而快速到达食物处。通过模拟这一行为,算法对两处的状态进行比较,然后选择较优的状态位置进行移动。
2.2 基于自适应思想的人工鱼群算法
人工鱼群算法作为一种新的算法,具有简单、快速等良好的特性,所以很受科研人员的关注。但是在收敛速度方面依然存在不足。
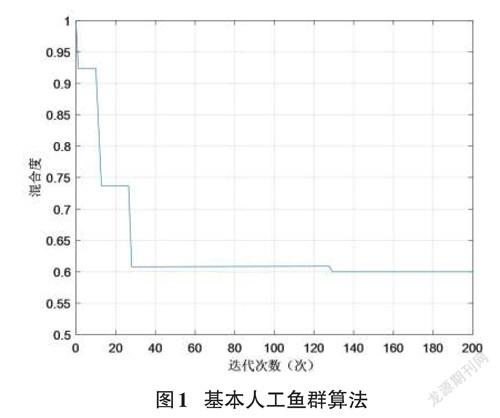
本文针对存在的问题,提出设置探索系数,来满足过程中步长和视野的需求变化。在搜索前期,较大的步长和视野可以开拓出更加广泛的空间,而在后期,较小的步长和视野可以更快地逼近最优解,从而收敛速度得到提升。具体公式如下:
[visualt=δvisualt-1k/k+1] (1)
[k=1-η10t/11T] (2)
[stept=0.5visualt] (3)
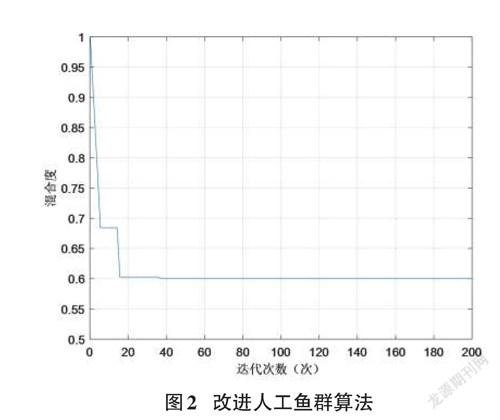
公式中,η、δ分别为视野收缩系数、视野扩大系数。k为控制视野缩小的参数。visualt为第 t次迭代的视野范围。stept为第t次迭代的步长。为了验证自适应思想对改进AFSA的收敛能力影响,利用已搭建的模型进行试验。从图1,图2中可以看出改进后的收敛速度要强于改进前。
2.3 优化目标的确定
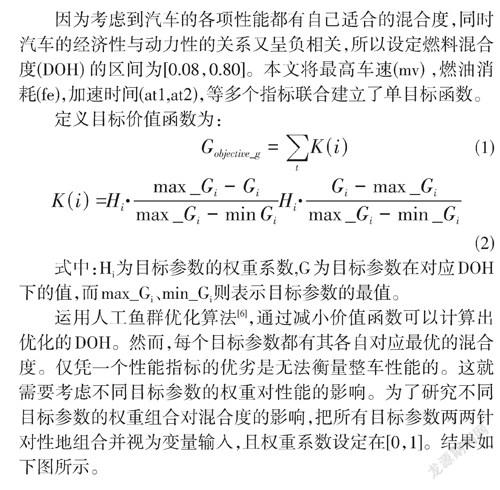
因为考虑到汽车的各项性能都有自己适合的混合度,同时汽车的经济性与动力性的关系又呈负相关,所以设定燃料混合度(DOH) 的区间为[0.08,0.80]。本文将最高车速(mv) ,燃油消耗(fe),加速时间(at1,at2),等多个指标联合建立了单目标函数。
定义目标价值函数为:
[Gobjective_g=tK(i)] (1)
[K(i)=][Hi·max_Gi-Gimax_Gi-minGi][Hi·Gi-max_Gimax_Gi-min_Gi] (2)
式中:Hi為目标参数的权重系数,G为目标参数在对应DOH下的值,而max_Gi、min_Gi则表示目标参数的最值。
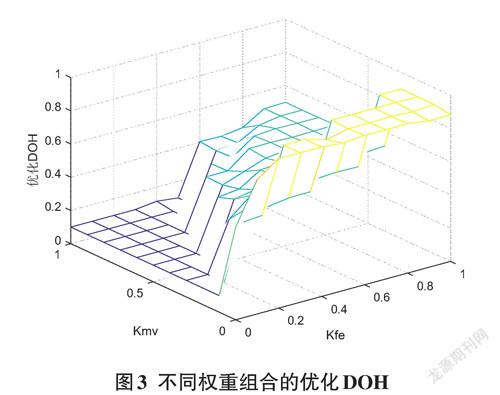
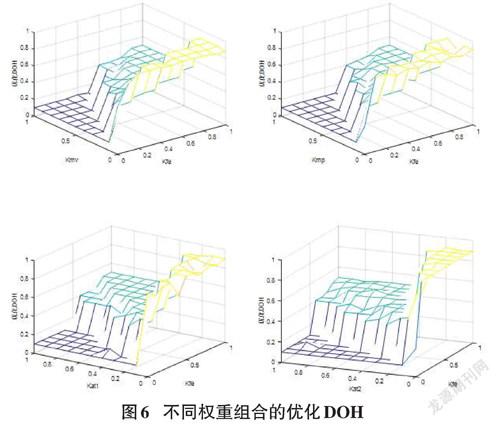
运用人工鱼群优化算法[6],通过减小价值函数可以计算出优化的DOH。然而,每个目标参数都有其各自对应最优的混合度。仅凭一个性能指标的优劣是无法衡量整车性能的。这就需要考虑不同目标参数的权重对性能的影响。为了研究不同目标参数的权重组合对混合度的影响,把所有目标参数两两针对性地组合并视为变量输入,且权重系数设定在[0,1]。结果如下图所示。
图3是最高车速与氢耗经济性关于DOH的对比关系图。图中显示了相对于Kfe,Kmv在优化混合度上占主导影响,组合中优化的混合度在0.5左右,这恰好是最高车速相对应的混合度。
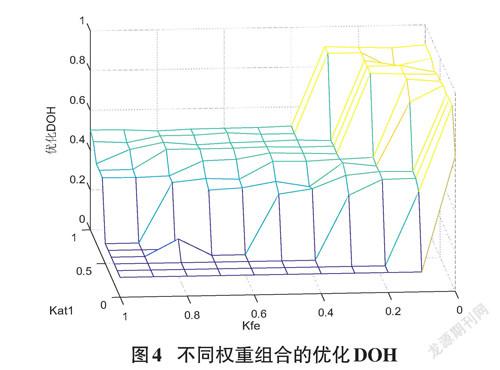
图4是0~25km/h加速时间和氢耗经济性关于DOH的对比关系图。在优化混合度中Kfe占主导作用。组合中优化的混合度都收敛于0.5左右。
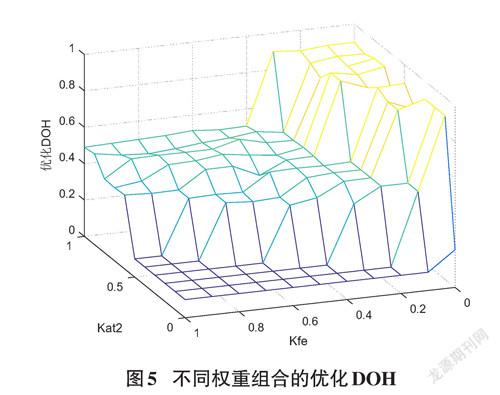
图5是0~50km/h加速时间和氢耗经济性关于DOH的对比关系图。和图4相比,优化效果更好,因为各个指标更多地趋近于各自的最优DOH。
图6是氢耗经济性与加速时间,最高车速,最大加速度的对比关系图。通过以上图可知各个指标的优化混合度大多在0.5左右。所以,选取混合度为0.55,并在下一环节进行验证。
3 燃料电池汽车仿真模型的建立
3.1 ADVISOR概述
ADVISOR2002是一种基于Simulink环境下,二次开发的高级车辆仿真器,可以应用在多种车型上进行仿真分析[7]。它可以根据使用者的需求进行搭建模型,部分参数可以直接输入到整车界面,另一部分则通过编写相对应模块的m文件进行更改,与目前市面上其他的仿真软件相比,它十分便利,易上手。
3.2 整车模型
3.2.1 车辆模型
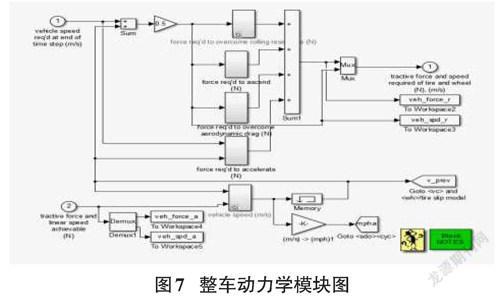
车辆系统以整车动力学为基础进行模型建立。通过对研究车辆的速度,受力等相关因素对模型进行搭建,模型如图7所示。
车辆的参数如表1所示:
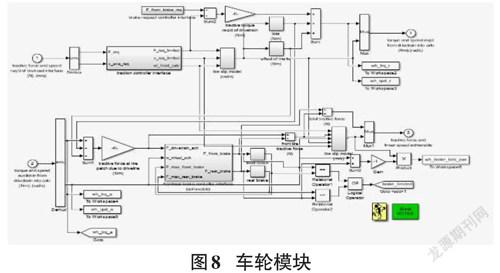
3.2.2 车轮模型
车轮模型通过主减速器来计算转速、转矩、轮胎的牵引力和速度来模拟车轮的运动状态。本课题的车轮参数如表2,车轮模型如图8。
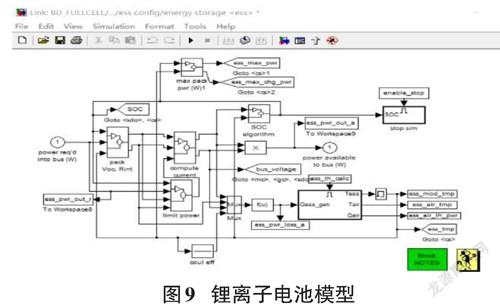
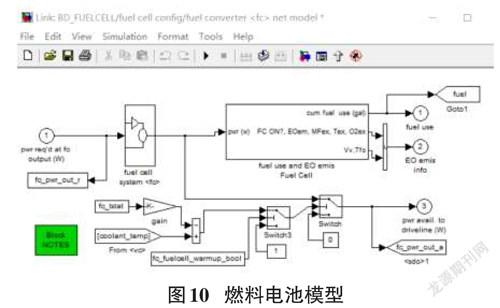
3.2.3 动力电池模型
目前被广泛采用的是Rint模型,该模型是通过建立铅酸电池模型发展起来的,锂离子电池与燃料电池结构如图9、图10所示。
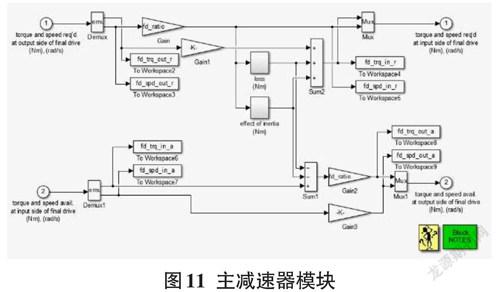
3.2.4 主减速器模型
主减速器连接在变速器之后,主要起到降低转速增加转矩的作用。其结构如图11所示。
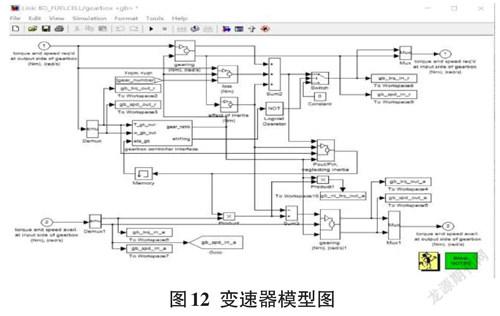
3.2.5 变速器模型
变速器可以通过传递不同的转速来达到给增距降低速度的目的。其结构如图12所示。
4 基于仿真软件的实验验证
4.1 车辆仿真
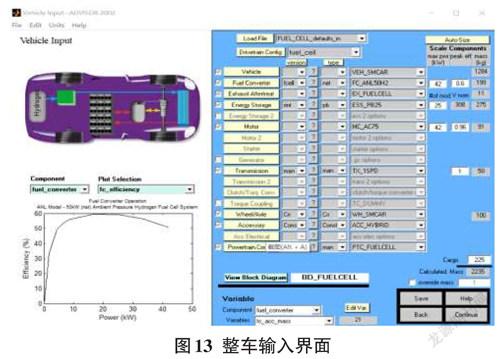
本文首先根据模型所需选定参数,然后考虑实际行驶情况的复杂多元性,选择NEDC工况进行模拟实验。相关参数如表3,保存好的整车输入界面如图13所示:
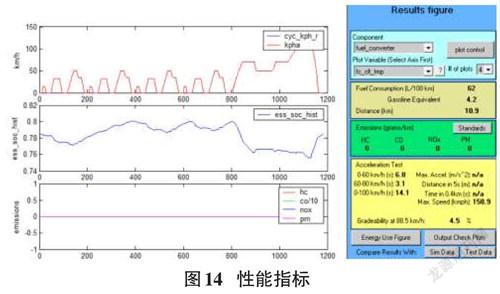
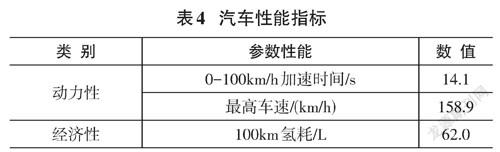
在设定的参数和选择的路況下进行试验,此时的性能指标如图14,表4。
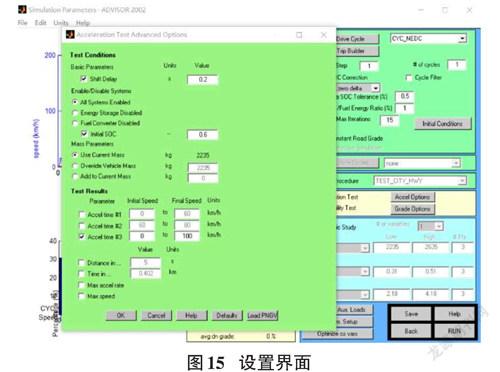
4.2 实验验证
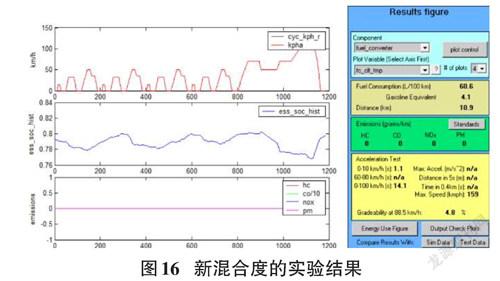
在NEDC工况下,对所选取的混合度进行试验。汽车参数设置完毕以后,点击右下角 Continue,进入下一步仿真参数设置。如图15、图16进行测试。
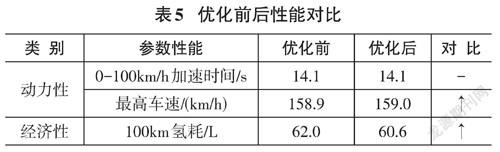
读取图14、图16可得数据如表5,根据图表数据可知优化后的混合度达到了试验的要求,该方案可行。
5 总结
本文针对汽车的动力性与经济性呈负相关的问题,建立目标函数,并用人工鱼群算法对其进行优化,最后对不同权重比下的优化混合度进行分析,得出一个最优混合度。
随后利用ADVISOR2002仿真软件,构建整车模型,将得出的混合度代入进行验证,试验结果表明优化后的汽车,各项性能有所提高,证明了混合度优化的有效性。
参考文献:
[1] 闫强,陈毓川,王安建,等.我国新能源发展障碍与应对:全球现状评述[J].地球学报,2010,31(5):759-767.
[2] AnL,Zhao T S,Yan X H,etal.The dual role of hydrogen peroxide in fuel cells[J].Science Bulletin,2015,60(1):55-64.
[3] 全睿.车用燃料电池系统故障诊断与维护若干关键问题研究[D].武汉:武汉理工大学,2011.
[4] Thomas C E,James B D,Lomax F DJr,etal.Fuel options for the fuel cell vehicle:hydrogen,methanol or gasoline?[J].International Journal of Hydrogen Energy,2000,25(6):551-567.
[5] 张京明,温新.汽车动力性与燃料经济性评价指标的研究[J].山东理工大学学报(自然科学版),1997,11(2):38-41.
[6] 张玉春,程春英.关于人工鱼群算法的探讨[J].内蒙古民族大学学报(自然科学版),2016,31(3):203-205.
[7] 曾小华,王庆年,李骏,等.基于ADVISOR2002混合动力汽车控制策略模块开发[J].汽车工程,2004,26(4):394-396,416.
收稿日期:2021-12-15
作者简介:汤世炎(1994—) ,男,辽宁鞍山人,沈阳工业大学在读硕士,研究方向为混合动力车能量优化;陈丽(1969—) ,女,辽宁沈阳人,沈阳工业大学副教授,博士,研究领域为磁悬浮技术及应用、混合动力车能量优化、太阳能系统能量优化。
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:14
陶瓷学报(2020年6期)2021-01-26 00:37:56
装备制造技术(2020年3期)2020-12-25 05:21:52
中学生数理化(高中版.高二数学)(2020年2期)2020-04-21 07:48:36
车迷(2017年12期)2018-01-18 02:16:11
电子制作(2017年10期)2017-04-18 07:23:13
电源技术(2017年1期)2017-03-20 13:38:06
电源技术(2015年2期)2015-08-22 11:27:42
电源技术(2015年9期)2015-06-05 09:36:06
电源技术(2015年9期)2015-06-05 09:36:05
