
高精度水声定位技术在深海油田系泊安装中的应用
2022-05-30 10:48吴颖媛于淼王火平赵韵
中国新通信 2022年11期
吴颖媛 于淼 王火平 赵韵
摘要:油气资源在目前的经济发展中发挥着重要的作用,在复杂多变的海洋环境下,针对深水油田群生产平台系泊安装需要高精度水下测量,本文提出一种高精度相对测阵水下定位技术。该技术首先基于射线传播模型进行部分信标绝对位置解算,然后使用信标间相互测距信息进行最小二乘法平差优化其余信标。实验数据结果表明,经信标间相互测距信息平差计算,不仅提高海底信标精度,而且提高了作业效率。
关键词:深水油田群;高精度相对测阵;射线传播模型;最小二乘法平差优化
一、引言
在21世纪,世界各国已经开始开发和利用海洋资源,海洋油气资源开采对国民经济建设和国家战略安全具有重要意义[1-3]。近年来,随着我国经济社会发展对能源需求持续增长,石油对外依存度达到70%以上[4-5]。海洋石油与海洋事业和海洋法律具有密切联系的产业。所以,海洋石油工业需结合新时代高新技术进行应用和发展[3,5]。深水油田群开发具有比浅海及陆上油田开发更多的挑战。目前国外深水油田群开发的涉及勘探、钻井、测井和试井等主要技术难点,国内的对深水油田群开发正处于发展阶段。未来全球海洋工程装备必将具有高端化、深海化和全球化等特点,海上油气开发平台也将向大型化深海化方向发展[3,5]。深水油田群开发采用浮式生产储卸油系统(FPSO)[6-8]。FPSO始于20世纪70年代中期,FPSO的建造主要取决于造船市场和超级油轮市场的起伏。目前,基于深水油田群开发的新设计概念和新规范,FPSO正摆脱常规船舶依赖概念,逐步向海洋工程设施方法。
FPSO主要通过采用永久式内转塔单点系泊系统。系泊系统一方面能够保证FPSO在预定海域的定位和安全功能外,另一方面需要為FPSO向水下生产系统提供功能控制。内转塔单点系泊系统主要包括大型浮体、内转塔系统、锚泊系统和立管系统。FPSO系泊系统设计需考虑复杂的海域条件,包括海域位置、水文和气象条件等。本文介绍的FPSO系泊系统是用锚腿固定于海底,锚基础采用吸力锚,在待测锚桩和锚链点处,由测量船携带遥控无人潜水器(ROV)协助布设水下信标,经高精度水声定位系统对信标进行定位,完成对锚链点和锚桩的测量,辅助完成系泊。目前水上目标定位主要采用全球卫星导航技术辅助的技术手段,但当目标处于水下时,由于水介质对于无线电磁波的强烈吸收作用,导致卫星无法完成对水下目标的定位。所以,水下定位主要通过以声波为信息载体的水声定位技术实现。FPSO系泊系统的完成对水声定位系统的种类和精度具有较高的要求。长基线定位系统适用于这种FPSO系泊系统的深水高精度要求,长基线定位系统通过测量载体到位置已知的海底应答器的相对距离,利用球面距离交会方法解算目标位置。在高精度的水声定位需求下,不仅要求水声定位系统具有高精度的声学测量标准,还要求水声定位过程中的系统误差进行高精度的修正。
深水油田群海域海洋环境条件恶劣,水声高精度定位系统受诸多因素限制。一方面海洋环境复杂多变,温度、盐度和压力的变化使得水声信道发生时间变化和空间变化,不仅导致接收端声信号的畸变,影响信号的检测和估计性能,最终影响水声定位系统的工作性能,而且会引起声速发生梯度变化,造成声线弯曲,导致水声测量偏差[9-11];另一方面,海洋环境各类噪声,如波浪、潮汐和生物等噪声,干扰水声信号进而降低信噪比[12-13],为保证接收端信号有效地提取和处理,必须通过加大声源级和抑制噪声等信号处理技术。另外,海洋环境中的不均匀的散射容易引起定位系统的声信号散射,进而导致形成混响影响接收端信号检测性能。本次深水油田群中锚安装精度需优于0.5m,传统的水声定位系统的设备和技术在该海域条件仍然面临挑战。
目前,国际上主流的定位系统,如法国IXBLUE公司生产的RAMSEE定位系统系列,通过稀疏阵列定位完成水下阵型测定[14];英国的Sonardyne公司新Compatt系列信标融合水声通信技术,代替过去单基线依次测量,可以同时多模式工作测量多个基线,大大提高阵型测量效率[15]。尽管目前国内长基线定位声学设备研发已经取得一定的成果[16-17],但水下阵型测量技术多数仍然处于依次对各阵元单独标定阶段,当阵元数量较多时,这种标定方式的每个信标受海洋声速变化影响,可能影响定位精度,而且需要长时间和大成本支持。哈尔滨工程大学在水下信标定位理论研究方面取得一定成果,兰华林提出了一种深海声信标的精确标定方法,该方法修正了水下声线弯曲对定位精度的影响[18];李莉基于长基线同步定位原理,对单基线相对阵型测量进行了初步探索[19]。
基于深水油田开发对精度优于0.5m的需求,本文提出相对测阵定位技术,利用绝对定位坐标和信标间基线长度测量进行平差优化海底信标精度。这种相对测阵技术是建立在考虑声线弯曲的模型解算基础上,基于射线声学模型进行绝对位置定位,再结合部分绝对坐标和信标间距测量平差优化海底信标位置精度。本文旨在通过对海底信标经相对测阵技术定位后,能够提高深海信标定位精度,进而提高作业效率。
二、相对测阵定位的基本原理
在水声定位系统对锚点上布放的多个信标测量时,传统的定位方法是对每个信标依次进行独立的圆轨迹定位,测量船上装有全球导航卫星系统(GNSS)和姿态传感器,经坐标转移计算船底安装的换能器坐标,测量圆轨迹是以每个信标为圆心、深度为半径进行声学测量,但是这种定位方式不仅作业时间跨度大、成本高,而且每个信标的定位精度不一致。本文的方法是只需对部分信标进行绝对位置标定解算,然后增加信标间相互测量距离就能得到高精度的定位结果。
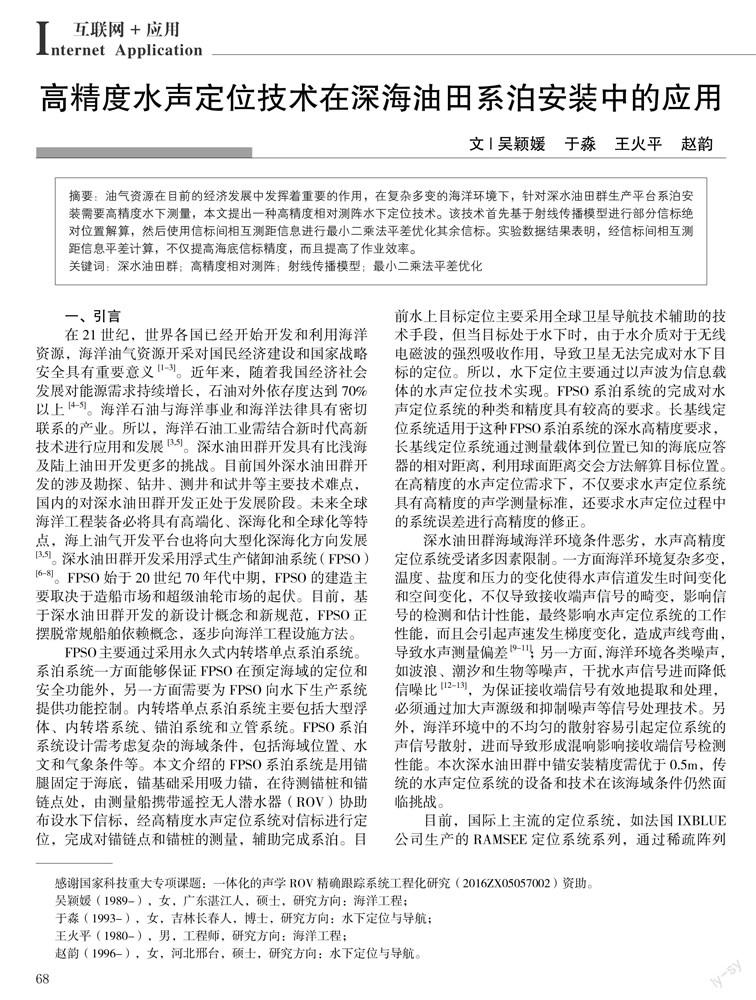
(一)绝对定位技术
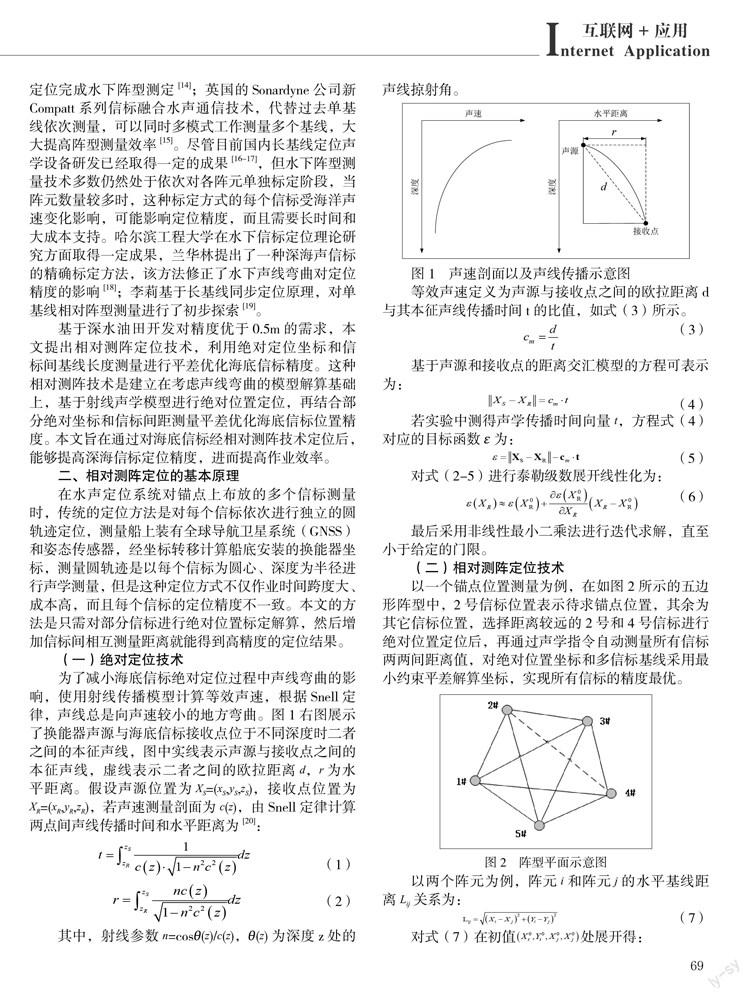
(二)相对测阵定位技术
三、实验数据结果
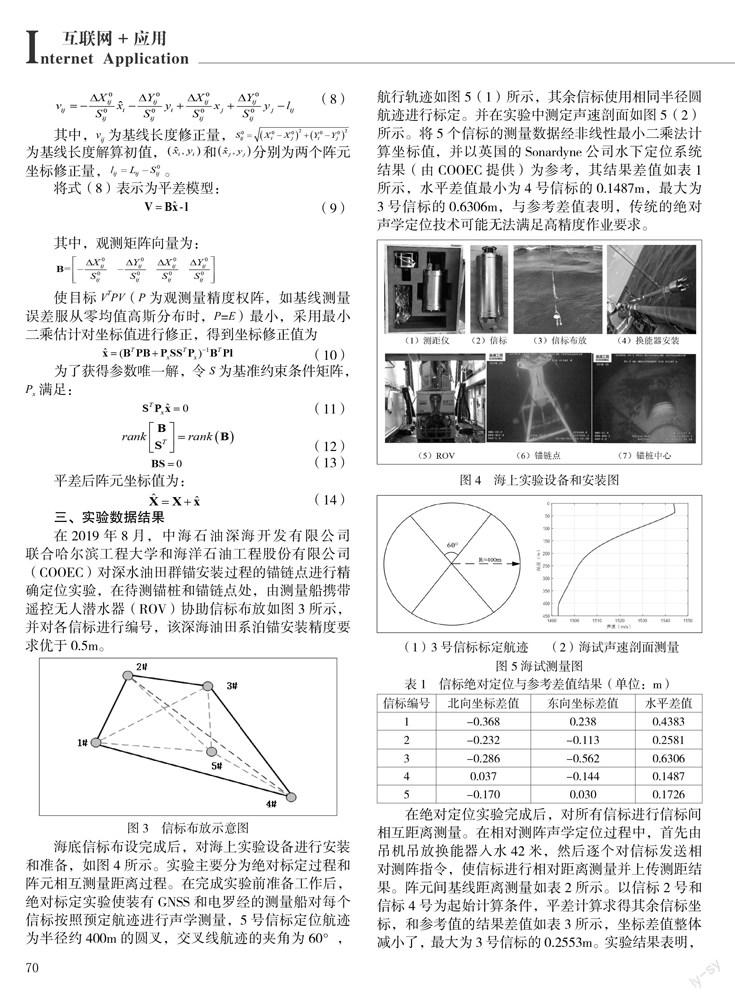
在2019年8月,中海石油深海开发有限公司联合哈尔滨工程大学和海洋石油工程股份有限公司(COOEC)对深水油田群锚安装过程的锚链点进行精确定位实验,在待测锚桩和锚链点处,由测量船携带遥控无人潜水器(ROV)协助信标布放如图3所示,并对各信标进行编号,该深海油田系泊锚安装精度要求优于0.5m。
海底信标布设完成后,对海上实验设备进行安装和准备,如图4所示。实验主要分为绝对标定过程和阵元相互测量距离过程。在完成实验前准备工作后,绝对标定实验使装有GNSS和电罗经的测量船对每个信标按照预定航迹进行声学测量,5号信标定位航迹为半径约400m的圆叉,交叉线航迹的夹角为60°,航行轨迹如图5(1)所示,其余信标使用相同半径圆航迹进行标定。并在实验中测定声速剖面如图5(2)所示。将5个信标的测量数据经非线性最小二乘法计算坐标值,并以英国的Sonardyne公司水下定位系统结果(由COOEC提供)为参考,其结果差值如表1所示,水平差值最小为4号信标的0.1487m,最大为3号信标的0.6306m,与参考差值表明,传统的绝对声学定位技术可能无法满足高精度作业要求。
在绝对定位实验完成后,对所有信标进行信标间相互距离测量。在相对测阵声学定位过程中,首先由吊机吊放换能器入水42米,然后逐个对信标发送相对测阵指令,使信标进行相对距离测量并上传测距结果。阵元间基线距离测量如表2所示。以信标2号和信标4号为起始计算条件,平差计算求得其余信标坐标,和参考值的结果差值如表3所示,坐标差值整体减小了,最大为3号信标的0.2553m。实验结果表明,新高精度水下定位技术不仅满足0.5m的作业需求,而且优化了所有信标的定位精度。与国外同型最先进水下定位系统的比测,验证了国产水声定位装备的精度及可靠性与国外同型最先进装备一致。
四、结束语
面对深海油田群系泊安装作业点测量优于0.5m的高精度需求,本文提出一种高精度水声定位技术,不仅提高了海底作业点信标的定位精度,而且简化了作业流程,节约作业时间和成本。
该方法在传统的绝对定位技术的基础上,采用相对测阵定位技术,即测量信标相互间的基线长度,以部分信标绝对定位位置为起算条件,使用基线长度测量进行约束,使信标坐标经最小二乘平差計算得到修正。
实验数据结果表明,海底信标经相对测阵技术定位后,不仅提高了深海信标定位精度,而且提高作业效率。
作者单位:吴颖媛 中海石油(中国)有限公司深圳分公司
于淼 哈尔滨工程大学 水声工程学院 海洋信息获取与安全工信部重点实验室(哈尔滨工程大学)工业和信息化部
王火平 中海石油(中国)有限公司深圳分公司
赵韵 哈尔滨工程大学 水声工程学院 海洋信息获取与安全工信部重点实验室(哈尔滨工程大学)工业和信息化部
参 考 文 献
[1] 赵婵. 深海油气勘探开发装备调研与发展前景探析[J]. 中国战略新兴产业, 2019, 000(036):26-27.
[2] 金秋, 张国忠. 世界海洋油气开发现状及前景展望[J]. 国际石油经济, 2005,13(3):43-57.
[3] 喻西崇, 谢彬, 金晓剑,等. 国外深水气田开发工程模式探讨[J]. 中国海洋平台, 2009,24(3):52-56.
[4] 张喜顺, 李敬元, 张向华,等. 深海石油钻采技术[J]. 石油钻采工艺, 2009,31(2):39-43.
[5] 林肖也,吴翠萍,李宏亮.向海而生又谱华章——世界级FPSO交付巴西 “海油建造”驶入南美浮体市场[J]. 中国石油企业, 2018,397(05):4+19-23.
[6] 金晓剑, 陈荣旗, 朱晓环. 南海深水陆坡区油气集输的重大挑战与技术创新——荔湾3-1深水气田及周边气田水下及水上集输工程关键技术[J]. 中国海上油气, 2018,30(003):157-163.
[7] 席敏红, 李莉, 周静毅,等. 巴西深海油气勘探开发成功经验分析[J]. 中外能源, 2019(12):20-27.
[8]王春升, 陈国龙, 石云,等. 南海流花深水油田群开发工程方案研究[J]. 中国海上油气, 2020,032(003):143-151.
[9] 孙大军, 郑翠娥. 水声导航, 定位技术发展趋势探讨 [J]. 海洋技术学报, 2015,34(3): 64-8.
[10] 孙大军, 郑翠娥, 张居成, 等. 水声定位导航技术的发展与展望 [J]. 中国科学院院刊, 2019,34(03): 331-8.
[11] 南德,李朝晖. 移动平台超短基线阵实现水下目标高精度定位 [J]; 声学学报, 2019,44(04): 534-44.
[12] Sun D , Ding J , Zheng C , et al. Angular misalignment calibration method for ultra-short baseline positioning system based on matrix decomposition[J]. Radar, Sonar & Navigation, IET, 2019, 13(3):456-463.
[13] 刘伯胜. 水声学原理 [M]. 哈尔滨工程大学出版社, 1993.
[14] 张居成. 深水长基线定位导航技术研究 [D]. 哈尔滨: 哈尔滨工程大学, 2014.
[15] 韩云峰,李昭,郑翠娥,等. 一种基于长基线交汇的超短基线定位系统精度评价方法[J].物理学报, 2015,64(5):1-7.
[16] 乔朝飞,熊伟,周星.未来综合导航定位技术刍议[J].测绘与空间地理信息, 2007.
[17] Han Y , Zheng C , Sun D . Signal design for underwater acoustic positioning systems based on orthogonal waveforms[J]. Ocean Engineering, 2016,117:15-21.
[18] 兰华林,孙大军,张殿伦,等.一种海底应答器绝对位置的精确校准方法[J].海军工程大学学报, 2007,19(5):32-34.
[19] 李莉.长基线阵测阵校阵技术研究 [D]. 哈尔滨: 哈尔滨工程大学, 2007.
[20] 李昭. 贝叶斯反演在高精度水声定位中的应用研究 [D]. 哈尔滨: 哈尔滨工程大学, 2016.
