
基于计算机视觉的电缆护套断裂伸长率测量技术
2022-05-30 08:53牟少华李志强
中国新通信 2022年12期
牟少华 李志强
摘要:为解决电缆护套断裂伸长率人工测量效率低的问题,设计了一套基于计算机视觉的电缆护套断裂伸长率测量系统,并提出了一种电缆护套断裂伸长率的自动化测量方案。首先在电缆护套表面的两端分别绘制一种圆环标记符,然后使用摄像机拍摄护套在拉力装置作用下的拉伸过程,利用边缘检测、连通域提取等图像处理技术获取电缆护套表面的标记符信息,并使用帧间差分法追踪标记符,实时计算并保存标记符形心位置,并以两个形心的间距作为标记符间距。本文提出了一种长度增量阈值判据,该判据够精确判定护套断裂所在帧,实验表明,该方法能够较为准确地测量出电缆护套的断裂伸长率。
关键词:断裂伸长率;帧间差分法;运动目标检测;电缆护套
一、引言
电缆护套是保护电缆内芯的重要材料,起到了维持内芯不受来自于外部的机械损害和化学腐蚀的保护作用,因此检测电缆护套的各项质量参数显得尤为重要。电缆护套的质量参数主要有最大拉力、拉伸应力、抗张强度和断裂伸长率[1],这些质量参数都离不开电缆护套最大形变量的测量。目前,各个质量检测公司对电缆各项参数的测量都主要通过人工测量的方式,存在效率低、测量结果受测量员主观意识影响较大等缺陷,因此电缆护套断裂伸长率自动化的测量方法显得尤为重要。
电缆护套在实验过程中呈渐进伸长的状态,可利用运动目标检测的方法追踪护套完成测量任务。运动目标检测的方法主要有帧间差分法、光流法和背景减除法。帧间差分法[3]是一种将连续的两帧或者多帧图像进行差分后,通过阈值法提取运动区域的运动追踪法。该方法计算量小,有良好的实时性,但存在不能提取出完整运动目标的问题。袁益琴[7]等提出了一种将帧间差分法和背景差分法相结合的遥感卫星视频的运动车辆检测方法,有效地抑制移动的背景边缘和残留噪声,提高了检测质量。帧间差分法对运动速度较慢的目标检测效果较差,且受环境噪声影响较大,Bhattacharya[8]等通过累积帧间差分的方式有效提升了运动目标的检测精度,并解决了目标对象在运动速度较慢时追踪质量差的问题。Cao[9]等提出了一种基于局部聚类分割的对称差分目标检测算法,解决了在红外航空视频序列中相邻帧间目标运动较小而导致追踪效果较差的问题,较好地分割出了运动速度相对较慢的目标对象。
对于电缆护套断裂伸长率的自动测量问题,高振斌[10]等提出了利用阈值分割求取标记点边缘轮廓,并利用标记点重心间距求取护套断裂伸长量的方法,有较高的测量精度,但未对护套断裂的判定方法进行说明。陈俊松[11]等提出的基于改进L-K光流法的护套断裂伸长率测量方案解决了护套断裂瞬间的判定问题,但利用光流法追踪特征点计算量大,速度较慢。本文采用帧间差分法追踪电缆护套上的标记符,可有效减少计算量,提高检测效率。提出了一种长度突变阈值判据,通过检测护套标记符间距的突变精确判定护套断裂瞬间,从而得到护套样品的断裂伸长率参数。该方法计算量小,效率高,可有效协助测量员完成测量任务。
二、基于计算机视觉的测量系统组成结構
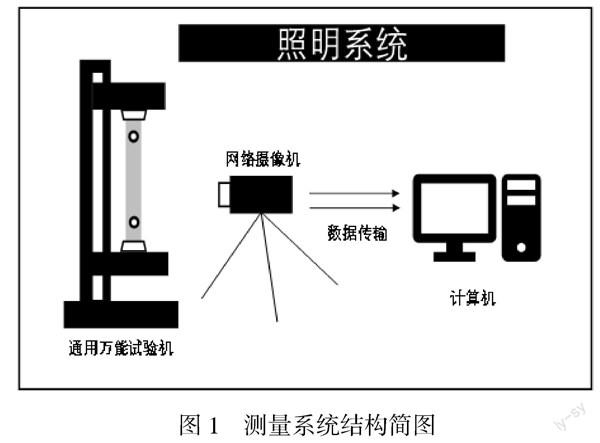
如图1所示,本测量系统由通用万能试验机、网络摄像机、计算机和照明系统组成。
通用万能试验机是一种可用于拉伸实验的装置,主要适用于试验负荷高的各类金属、非金属和复合材料进行力学性能测试和分析研究,具有应力、位移、应变三种闭环控制方式,可求出断裂伸长率、最大力、弯曲强度和弹性模量等参数。将待测的材料用试验机夹具沿竖直方向夹紧后,内置的伺服电机驱动系统控制传动横梁向上运动,能够基本保持以恒定的速度移动,并具有精准的加载速度和测力范围。通过与之配套的操作软件,可获取拉力、长度等过程参数,通用万能试验机的实物图如图2所示。
照明系统用于为整个测量系统提供稳定的光源,以降低环境亮度变化对实验造成的影响。在实验开始时,使用试验机夹具将电缆护套样品竖直夹紧,实验开始后,试验机匀速缓慢拉伸电缆护套样品。利用网络摄像机拍摄实验过程,并同步将拍摄数据传输至计算机,然后由计算机软件实时计算护套标记符间距,并在检测到电缆护套断裂时,输出断裂伸长率。电缆护套样品如图3所示。
三、基于计算机视觉的测量系统软件框架
本系统在Python 3.6环境下开发,并用OpenCV开源函数库辅助完成。采用面向过程的软件设计思路,将整个测量系统按功能划分为四个模块:图像预处理模块、追踪模块、断裂判断模块和计算模块。其中图像预处理模块的主要功能是图像去噪和利用连通域提取等数字图像处理技术获取初始标记符的位置信息,并计算标记符初始间距;追踪模块主要利用帧间差分法在连续的图像序列中检测标记符的位置,并实时计算标记符间距;断裂判断模块主要利用间距增量阈值判据准确判定电缆护套的断裂时刻;计算模块主要功能是整合各个过程参数,计算电缆护套断裂伸长率。分别实现各模块功能后拼接组成软件系统,功能模块化后的测量系统具有良好的错误定位能力,并降低了系统功能的耦合性,利于各组件的功能更新与删改。测量流程图如图4所示。
首先通过网络摄像机获取包含电缆护套样品的第一帧图像,如图5(a)所示,采用高斯滤波平滑图像,然后对图像进行二值化操作[12],得到图5(b)所示图像。进一步地,利用轮廓提取法[13]得到包含标记符在内的大量连通域。在摄像机与通用万能试验机距离约为1米的实验环境下,单个标记符的像素面积大约为70个像素大小,因此通过面积阈值条件将像素面积小于50或者大于100的连通域滤除。然后利用标记符为圆环的特点,筛选出圆形度[15]大于0.8的连通域,即为目标标记符[11]。最后利用形心公式计算标记符的形心,如图5(c)中红点所示,并将其间距作为标记符的初始间距。
在电缆护套的拉伸过程中,采用帧间差分法对标记符进行追踪。帧间差分法是将当前帧与前一帧图像进行差分,再通过阈值条件获取运动目标的方法,其原理可以表示为:
(1)
其中dk(x, y)为当前帧与前一帧差分的结果,fk(x, y)为当前帧,bk(x, y)为前一帧。阈值分割条件可表示为:
(2)
其中Rk(x, y)为二值化后的帧间差分图像,T为根据实验环境光亮设置的灰度阈值。帧间差分法原理简单,计算量小,因此具有良好的快速性,能够应用于实时检测系统之中。同样也存在一些缺点,其一,帧间差分法通过相邻两帧图像作差的方式获取运动目标,则需要实验环境的背景固定,因此不能应用在摄像机运动的场景中;其二,当目标对象处于静止或是运动速度较慢的状态时,会出现跟踪目标丢失的情况;其三,当运动目标表面存在大面积灰度值相同或相近区域时,对图像进行差分处理会导致这些区域出现孔洞。
图6为对某连续两帧图像使用帧间差分法的追踪效果,其中图6(a)为第n帧图像,将第n+1帧图像与第n帧图像进行差分得到如图6(b)所示结果,根据光照条件选取合适阈值(本文阈值设定为130)对图6(b)进行二值化处理后得到如图6(c)所示结果。由结果可看出,采用帧间差分法能够准确地分割出运动的标记符。接着,根据分割出的标记符信息分别计算其形心位置,实时计算并保存两个形心的间距,并将其作为标记符间距。
在拉伸过程,在每一帧图像中计算标记符间距,并实时存储。根据胡克定律,在弹性限度内,固体材料因受力产生的形变量与受力大小之间呈线性关系。结合多次实验结果可以发现,护套样品在稳定拉伸过程中,标记符间距呈现均匀增大的状态,但在护套断裂的瞬间,标记符间距将产生明显突变。用某次实验为例,以每一帧图像中标记符的间距为纵坐标,与之对应的帧数为横坐标绘制坐标图如图7所示。
由图7可知,实验开始前,标记符间距保持不变;实验开始至电缆护套断裂前,标记符间距均匀增大,曲线斜率基本不变;电缆护套断裂瞬间,标记符间距增量突增,坐标图斜率突变。通过以上特点,提出了一种长度增量阈值判据,其判定流程如图8所示。
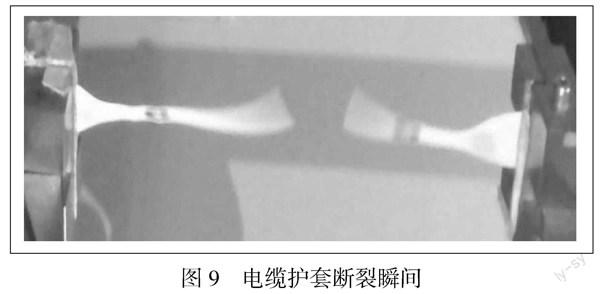
在检测到标记符间距开始增大后,保存每一帧图像中的标记符间距。与此同时,对其进行最小二乘法的直线拟合,具体过程为:利用最开始的两点计算初始直線方程,每当有新的点增加,通过最小化误差的平方和的方式修正直线方程的斜率和常数项,以寻找最佳的函数匹配。当拟合点的数量达到阈值后,对每一帧图像中标记符间距增量进行判定,即计算当前点与拟合直线的距离,若该距离小于阈值,则实验继续;若该距离大于阈值,则标记符间距出现了突增,判定电缆护套断裂,并通过标记符的初始间距和最大间距计算该样品的断裂伸长率。实验表明,该判据能够准确定位电缆护套的断裂瞬间,如图9所示。
四、实验结果与分析
由当前国家标准[1],断裂伸长率的定义为电缆护套在受拉力断裂时的长度增加量与护套原始长度的比值,可表示为
(3)
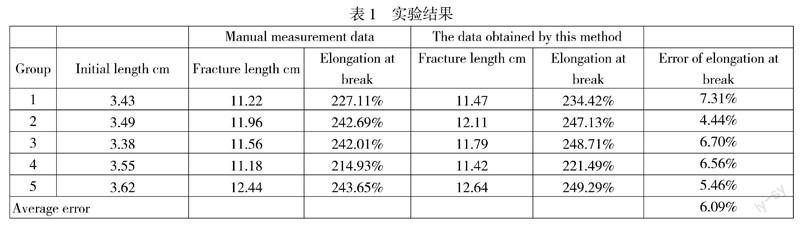
其中p为断裂伸长率,Δl为电缆护套的伸长量,l为护套原始长度。在实验中以标记符的初始间距作为电缆护套的原始长度,以电缆护套断裂瞬间标记符的间距作为其最大长度。以测量员对5组电缆护套样品的测量结果为参照,用本文提出的基于计算机视觉的自动测量方法得到的测量结果与之对比,得到如表1所示结果。
实验结果表明,本文提出的方法所得结果与人工测量所得结果平均误差为6.09%,能够较好地完成测量任务。本方法的优势在于一方面利用帧间差分法对运动的标记符进行追踪,计算量小,拥有良好的实时性;另一方面提出的长度增量阈值判据能够准确地判定电缆护套断裂所在帧,避免了人工判定电缆护套断裂时刻的主观性和不稳定性,自动化的测量方案极大地提高了工作效率。
在实际生产生活中,电缆断裂伸长率的测量主要是采用人工测量的方式,具体为实验开始前在电缆护套两端分别绘制标记符,测量并记录标记符间距,并将其作为电缆护套的初始长度。在电缆护套的拉伸过程中,人工地判定断裂瞬间,并测量电缆护套断裂时标记符的间距。上述人工测量法在测量标记符的初始间距和最大间距时两次引入了测量误差,并且在测量标记符最大间距时,由于测量时间短,产生的测量误差较大。另一方面,随着操作人员的长时间工作,受反应速度下降的影响,电缆护套的断裂瞬间判定的准确率也会随之下降。本文方法采用基于数字图像处理技术的方式对电缆护套拉伸前后标记符间距进行测量,测量精度和测量稳定性都高于人工测量的方式。同样本文测量方法也存在一些不足之处,其一在于利用帧间差分法追踪标记符,在标记符运动速度较慢的情况下,会出现标记符轮廓提取不完整的现象,从而影响标记符形心位置的计算,进一步造成标记符间距测量不准确,可通过改进帧间差分法的方式优化该问题;其二在于电缆护套断裂时间的判定问题,采用本文方法获取的电缆护套断裂瞬间存在两种情况:
1.电缆护套断裂所在时刻恰好处于图像序列的某一帧中;
2.电缆护套断裂时刻处于图像序列的两帧之间。
其中第一种情况不会产生测量误差,而当处于第二种情况时,假设电缆护套的断裂时刻t处于第n帧和第n+1帧之间,可由式(4)表示为:
(4)
本文算法仅能在第n+1帧时,即在tn+1时刻,检测出电缆护套断裂,在电缆护套断裂的真实时刻t到检测出断裂的tn+1这段时间内,标记符的移动距离可由式(5)表示为:
(5)
其中d为标记符移动距离,v为标记符移动速度。因此,该种情况会造成测量出标记符的最大间距大于其真实值,进一步会导致计算出的断裂伸长率的值偏大。目前实验采用帧率为30赫兹的网络摄像机,当电缆护套的真实断裂时刻恰好处于tn时刻的下一时刻,此时将产生情况2所引起的最大误差,最大误差可由式(6)表示为:
(6)
其中e为最大误差,v为标记符移动速度,f为摄像机的帧率。由式(6)可知,选用帧率更高的摄像机能够减弱这种情况造成的测量误差。经过多次实验得到标记符在世界坐标系下运动速度约为0.36cm/s,当摄像机帧率达到120赫兹时,最大误差约为0.003cm/s,在工程意义下基本可认为该误差不会对实验结果产生明显影响。
此外,在电缆护套的拉伸过程中,标记符会产生一定形变,从而对标记符间距的测量和计算带来误差。一方面,本文采用的利用两个标记符形心的距离作为标记符间距的方式在一定程度上可以削弱上述情况造成的影响;另一方面,经过多次实验发现当把标记符绘制于靠近电缆护套两端的位置时,电缆护套拉伸过程标记符产生的形变量远小于将标记符绘制于电缆护套中间区域时产生的形变量,因此利用标记符的绘制位置也可降低上述情况带来的影响。
五、结束语
本文提出了一种基于计算机视觉的电缆护套断裂伸长率测量方案,该方法实现了电缆护套断裂伸长率的自动化测量,提出的长度增量阈值判据可精确地定位护套断裂瞬间,解决了人工判定存在的主观性和不稳定性的问题。该方法在稳定光源的实验环境下,能够高效地完成测量任务,具有较强的工程意义。
参 考 文 献
[1] GB/T2951. 11-2008, 电缆和光缆绝缘和护套材料通用实验方法[S]. 北京: 中国标准出版社, 2008.
[2]张格悠, 龚俊, 陈俊松, 等. 基于双目视觉的电缆护套断裂伸长率自动测量[J]. 计算机辅助设计与图形学学报, 2021, 33(11): 1668-1676.
[3] Kim C, Hwang J N. Fast and automatic video object segmentation and tracking for content-based applications[J]. IEEE Transactions on Circuits & Systems for Video Technology, 2002, 12(2): 122-129.
[4]屈晶晶, 辛云宏. 連续帧间差分与背景差分相融合的运动目标检测方法[J]. 光子学报, 2014, 43(07): 219-226.
[5]孙挺,齐迎春,耿国华.基于帧间差分和背景差分的运动目标检测算法[J]. 吉林大学学报, 2016, 46(04):1325-1329.
[6]郝毫刚, 陈家琪. 基于五帧差分和背景差分的运动目标检测算法[J]. 计算机工程, 2012, 38(04): 146-148.
[7]袁益琴, 何国金, 王桂周, 等. 背景差分与帧间差分相融合的遥感卫星视频运动车辆检测方法[J]. 中国科学院大学学报, 2018, 35(01): 50-58.
[8] Bhattacharya S, Idrees H , Saleemi I, et al. Moving Object Detection and Tracking in Forward Looking Infra-Red Aerial Imagery. Springer Berlin Heidelberg, 2011.
[9] Cao Y, Wang G, Yan D, et al. Two Algorithms for the Detection and Tracking of Moving Vehicle Targets in Aerial Infrared Image Sequences[J]. Remote Sensing, 2015, 8(1): 28-28.
[10]高振斌, 冯宁楠. 基于机器视觉的电缆护套拉伸长度测量[J]. 计算机测量与控制, 2013, 21(05): 1120-1122.
[11]陈俊松, 龚俊, 张格悠, 等. 基于改进L-K光流法的电缆断裂伸长率测量技术[J]. 仪器仪表学报, 2021, 42(04): 256-264.
[12]王强, 马利庄. 图像二值化时图像特征的保留[J]. 计算机辅助设计与图形学学报, 2000(10): 746-750.
[13]甘玲, 林小晶. 基于连通域提取的车牌字符分割算法[J].计算机仿真, 2011, 28(04): 336-339.
[14]李仪芳, 刘景琳. 基于连通域算法的区域测量[J]. 科学技术与工程, 2008(09): 2492-2494.
[15]牛立聪, 孙香花, 左晓宝. 基于Matlab图像处理的砂石颗粒圆形度计算方法[J]. 混凝土, 2012(01): 10-12.
作者单位:牟少华 日照市工业和信息化局无线电监测站
李志强 日照市职业技术学院
