
挖掘机远程无线遥控系统设计
2022-05-28 02:07刘学良王军涛刘昌盛
建筑机械化 2022年5期
刘学良,王军涛,刘昌盛
(山河智能特种装备有限公司,湖南 长沙 410100)
在山体滑坡、泥石流及危化品爆炸等危险场景下,一方面需通过挖掘机进行土石方施工以快速进行救援作业,另一方面又要保证挖掘机操作手的人身安全,常规挖掘机无法满足该需求,故研究开发远距离挖掘机无线遥控系统十分必要。
目前挖掘机常用的遥控方式是采用便携式手持遥控器进行操作,但其遥控距离近,一般小于200m,且其操作手柄短,手感差,因而其应用范围窄、作业效率低。本方案研究了一种基于遥控舱的远距离操作的遥控系统,遥控距离不低于2km,遥控舱采用座舱式设计,舱内座椅、操作手柄、脚踏均采用与挖掘机司机室内相同的布置方式,操作方式保持很好的一致性;同时该舱内显示屏显示了挖掘机的工作信息及挖掘机周围环境视频信息并播放挖掘机现场的声音信息,方便操作手对机器状态及周围环境的了解,从而可以更高效地进行对挖掘机远距离遥控操作。
1 技术原理
挖掘机无线遥控系统(图1)主要由挖掘机端控制系统、音视频系统和遥控舱端控制系统、监视系统组成,遥控舱与挖掘机通过无线网桥进行通信。遥控操作时,遥控舱内控制系统获取各操作指令后通过网络接口经交换机后传输至遥控舱端无线网桥,信号经无线传输后传输至挖掘机端无线网桥,后经交换机后传输至挖掘机端控制系统,控制系统根据接收到的指令控制发动机、液压电磁阀组等从而实现挖掘机发动机油门调速及整机动作、灯光等的控制。
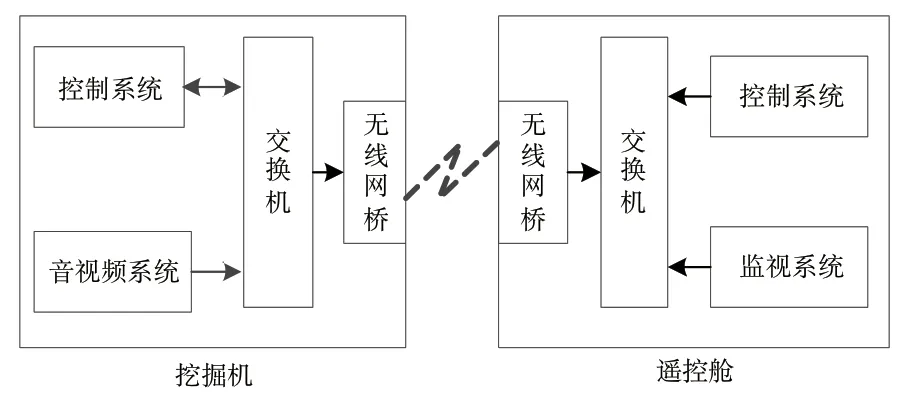
图1 挖掘机遥控系统组成
挖掘机端控制系统获取的各类传感器数据、发动机信息等数据及音视频系统中各摄像头、拾音器数据均通过网络接口经交换机传输至挖掘机端无线网桥,经无线传输后发送至遥控舱无线网桥进行接收,后经交换机传输至监控系统中电脑主机进行数据解析,最终通过显示屏进行挖掘机工作参数显示及音、视频的播放和显示。
系统中各网络通信设备均设置为同一网段,并各有唯一的IP地址,从而实现各设备间的通信。
1.1 挖掘机控制系统
挖掘机控制系统主要包括控制器、显示屏、模式开关、发动机ECU、传感器、电磁阀组、继电器等组成,其系统简图如图2 所示。系统中,以控制器为核心,控制器通过CAN 总线与发动机ECU、回转编码器、倾角传感器、显示屏连接进行数据通信,通过开关量输出控制继电器组,通过模拟量信号采集获取传感器、操作手柄、行走脚踏数据,通过RJ45 网络接口与交换机连接,通过DO 与PWM 输出控制电磁阀开关或电磁比例阀电流值大小。

图2 挖掘机控制系统原理框图
机器工作时,控制器读取模式开关信号,判断当前是手动模式或遥控模式,并采集操作手柄、行走脚踏等信号,读取发动机系统转速、冷却水温等工作数据及发动机故障代码信息,采集读取挖掘机液压系统温度及压力数据,读取平台回转编码器数据获取挖掘机上车转动角度值,读取平台、动臂、斗杆、铲斗倾角传感器数据获取车身倾斜角度值及动臂、斗杆、铲斗的转动角度值,并将数据传输至显示屏及交换机。控制器通过CAN 总线发送油门调速指令给发动机ECU,实现发动机转速控制,通控制电磁阀开关及比例电磁阀电流大小实现机器遥控动作速度的控制。
模式开关选择遥控模式时,控制器接收来自遥控舱的操作指令信号,不执行司机室内操作手柄、脚踏等信号;模式开关选择手动模式时,控制器根据司机室内操作手柄、脚踏等信号进行挖掘机动作控制,不再接收遥控操作指令,以区分手动模式与遥控模式功能。
1.2 音视频系统
音视频系统主要包括网络拾音器、网络摄像头、360°全景环视系统,系统简图如图3 所示。

图3 挖掘机音视频系统原理框图
网络拾音器用于获取遥控挖掘机工作现场声音,安装于司机室内;网络摄像头用于获取机器周围及铲斗与动臂上方视野,360°全景环视系统包括4 个摄像头及主机,4 个摄像头分别安装在挖掘机的前后左右4 个方向,通过360°全景主机进行合成后形成挖掘机360°环视系统,实现挖掘机周围环境的俯瞰视图图像获取,网络拾音器、网络摄像头、360°全景主机均通过RJ45 网络接口与交换机进行连接。
1.3 遥控舱系统
遥控舱控制系统及视频监视组成如图4 所示,控制系统主要由控制器,左、右操作手柄,左、右行走脚踏,油门旋钮,控制开关组成;视频监视系统主要由电脑主机及显示屏组成。遥控操作时,控制器采集操作手柄、行走脚踏、油门旋钮及控制开关信号,经处理后转化为控制指令通过RJ45 网络接口传输至交换机;电脑主机通过RJ45 网络接口接收来自挖掘机端的控制系统发送的挖掘机工作参数及音视频系统中的拾音器、网络摄像头、360°全景主机数据并通过软件进行解析,最后在显示屏上进行图像显示及声音播放。

图4 遥控舱系统原理框图
2 主要设备选型
系统主要设备为无线网桥、控制器、摄像头,分别影响了无线传输的距离与速率、控制系统功能、视频延时。系统以9 路摄像头共9Mbps速率,1 路音频200kbps 速率,系统工作参数与遥控指令共约800kbps 计算,无线网桥需满足10Mbps@2km 的带宽要求。控制器应具有多IO端口及网络通信功能,可进行整车功能控制及通过TCP/IP、UDP/IP 协议与外部设备进行通信。摄像头应为低延时的车载网络摄像头,视频延时应低于300ms.
1)无线网桥 无线网桥采用的是6690 型无线网桥,设备使用的是5.8GHz 的波段,主要参数如表1 所示,具有传输带宽大、抗干扰能力强的特点。最大带宽可达到20Mbps@2km。
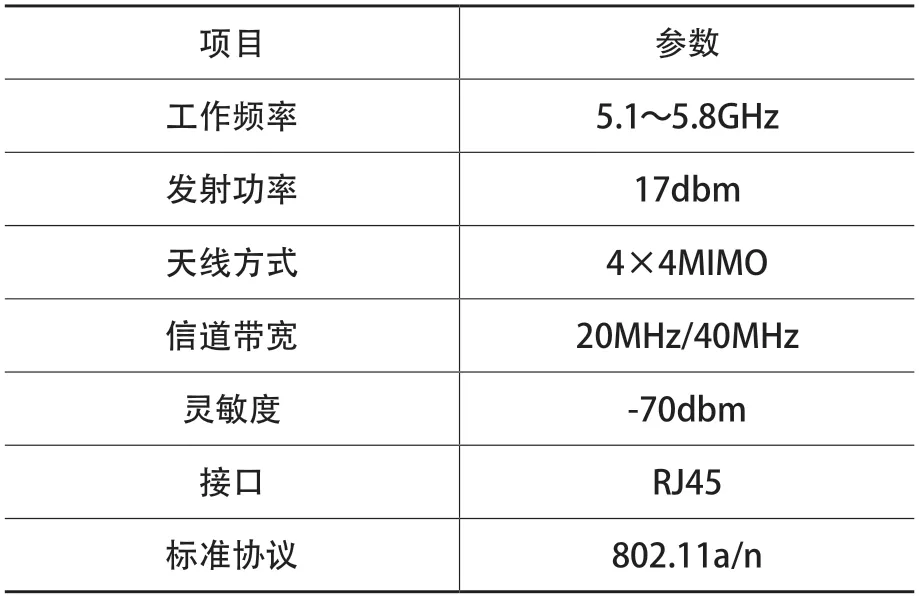
表1 无线网桥主要参数
2)控制器 挖掘机及遥控舱所使用的控制器采用的是CR711S控制器,其具有2 路网络接口,兼容TCP/IP、UDP/IP 及Modbus UDP通信协议,可直接进行网络通信,此外具有4 路CAN通信接口,可满足与各类CAN 设备的通信需求,其主要参数如表2 所示。控制器软件采用的时Codesys V3.5 版本软件,具备在线监测及离线仿真功能,使用方便。
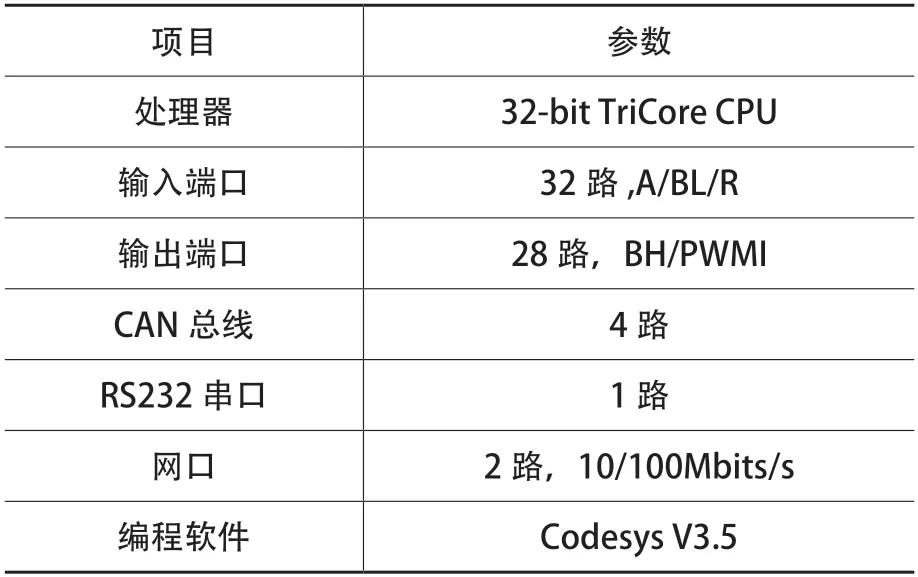
表2 CR711S控制器主要参数
3)网络摄像头 摄像头采用DH-IPCHMW7230 车载网络摄像头,其具有很好的抗振动及抗冲击性能,摄像头主要参数如表3 所示,其分辨率最高可达1 080P,图像延时不高于300ms,并自带红外补光灯,可满足挖掘机夜间施工作业时的摄像要求。
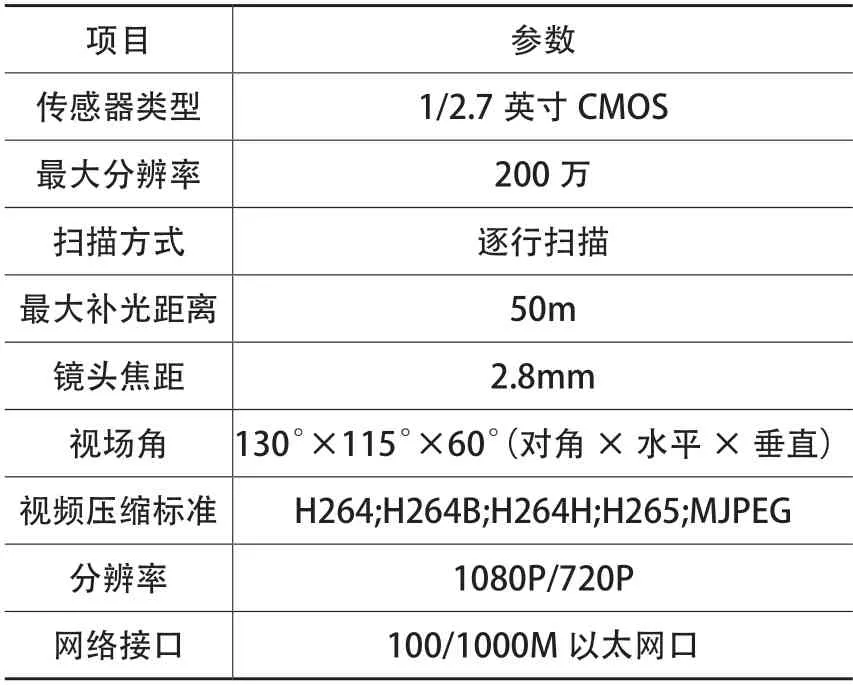
表3 DH-IPC-HMW7230摄像头主要参数
3 功能实现
通过在山河智能SWE215ERC 挖掘机上搭载该方案的遥控系统,实现了遥控舱对挖掘机的遥控操作及挖掘机信息的监视功能,挖掘机及遥控舱外形如图5 所示,遥控舱内显示屏显示画面如图6 所示,实现画面中包括摄像头画面、360°环视画面、挖掘机三维姿态实时模型及工作信息。

图5 挖掘机与遥控舱
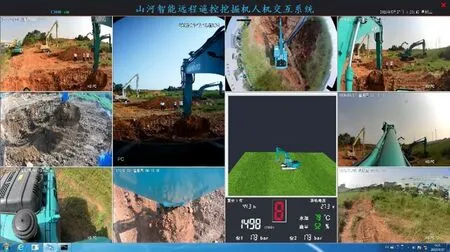
图6 遥控舱显示屏监控界面
通过试验测试,遥控舱与挖掘机距离2km时,操作手在遥控舱内仍能正常遥控操作机器,舱内显示屏显示的挖掘机各摄像头视频及播放的挖掘机现场声音均流畅无卡滞。试验验证了该技术方案可行,满足远距离遥控操作的需求。
4 总结
通过在山河智能挖掘机上进行该技术方案的验证,结果表明该方案实现了挖掘机的远程遥控及对挖掘机周围环境的视频与声音监控,达到了预期效果。遥控舱因其与挖掘机司机室一致的布置方式及操作方式,极大地提高了遥控作业时的作业效率。远程无线遥控作业挖掘机有效地解决了挖掘机受限于危险作业环境下的难题,提高了挖掘机的适应性,具有良好的推广应用价值。
猜你喜欢
农机质量与监督(2021年5期)2021-07-02
少年文艺·我爱写作文(2021年2期)2021-01-11
学生天地(2020年16期)2020-08-25
电子制作(2018年11期)2018-08-04
海外星云(2016年17期)2016-12-01
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
有色金属设计(2015年2期)2015-02-28
筑路机械与施工机械化(2014年10期)2014-03-01
筑路机械与施工机械化(2014年8期)2014-03-01
