
轮毂电机不平衡电磁力对车辆垂向振动影响的分析
2022-05-25 08:16:22吴石李怡鹏
哈尔滨理工大学学报 2022年2期
吴石 李怡鹏

摘要:为研究轮毂电机偏心对车辆垂向振动的影响,首先建立1/4车辆垂向振动模型;然后建立偏心引起的不平衡电磁力模型,仿真分析轮毂电机的不平衡垂向电磁力,研究电机偏心引起的垂向振动;最后通过仿真和实验得到轮毂电机驱动的电动汽车在不同偏心时,在不平衡电磁力和路面输入双重激励下的垂向振动情况,分析不平衡电磁力对车辆垂向振动的影响。仿真和实验结果表明,轮毂电机偏心引起的振动会随着偏心距和轮毂电机转速增大而增大,最大车速80km/h下,0.12mm偏心轮毂电机比0.1mm偏心轮毂电机振动加速度峰值增加了36.1%,均方根值增加了15.4%。
关键词:轮毂电机;偏心力;不平衡电磁力;垂直振动
DOI:10.15938/j.jhust.2022.02.003
中图分类号: TH164;TG501
文献标志码: A
文章编号: 1007-2683(2022)02-0021-08
Analysis of the Influence of the Unbalanced Electromagnetic Force
of the In-wheel Motor on the Vertical Vibration of the Vehicle
WU Shi,LI Yi-peng
(School of Mechanical Engineering, Harbin University of Science and Technology, Harbin 150080,China)
Abstract:In order to study the influence of the hub motor eccentricity on the vertical vibration of the vehicle, we first establish a 1/4 vehicle vertical vibration model, and then establish an unbalanced electromagnetic force model caused by the eccentricity, simulate and analyze the unbalanced vertical electromagnetic force of the hub motor, and study the vertical vibration caused by the motor eccentricity. Finally, through simulation and experiments, the vertical vibration of the electric vehicle driven by the wheel hub motor under the dual excitation of unbalanced electromagnetic force and road surface input is analyzed, and the influence of unbalanced electromagnetic force on the vertical vibration of the vehicle is analyzed.Simulation and experimental results show that the vibration caused by the eccentricity of the hub motor will increase with the increase of eccentric distance and the speed of the hub motor, and the maximum speed of the vehicle is 80km/h, the 0.12mm eccentric hub motor increases by 36.1% compared with the peak vibration acceleration of the 0.1mm eccentric hub motor, and the rms value increases by 15.4%.
Keywords:in-wheel motor; eccentricity force; unbalanced magnetic pull; vertical vibration
0引言
輪毂电机驱动汽车具有传动效率高、可实现多种驱动方式等特点,目前已成为车辆工程领域研究的热点之一,同时轮毂电机引起的电磁激励、整车非簧载质量增大等因素会影响车辆的动态特性。针对于此,目前很多学者对这两方面的影响做了研究。
夏存良等[1]研究了因非簧载质量增加造成的汽车垂向振动特性变化,车轮质量增加带来的影响主要是车轮动载荷显著变大。Ning Guobao等[2]通过建立汽车垂向振动模型,研究了簧下质量增加对整车垂向振动特性的影响,并提出了解决方案。童炜等[3]研究了轮毂电机驱动汽车簧下质量增大对汽车平顺性的影响,通过1/4汽车垂向振动模型,提出了用于评价车辆垂向平顺性的指标。徐广徽等[4]研究了汽车簧下质量增加对车辆平顺性的影响,分析了功率流对振动能量传递的影响,发现非簧载质量增大增加了悬架的能量消耗,影响车辆乘坐舒适性。韩以伦等[5-6]提出了两种不同簧下质量的电机悬置方案,研究了两方案下车辆的平顺性,应用NSGA-Ⅱ算法对橡胶衬套刚度和阻尼进行优化设计,并进行仿真验证,研究结果表明优化后的电机整体悬置方案能有效降低车身加速度和轮胎动载荷,提高了车辆平顺性。
以上文献均从非簧载质量增加的角度上研究了轮毂电机驱动汽车的动力学性能,而由于轮毂电机集成安装于驱动轮中,与轮毂等结构固连,使得传递路径发生变化,因此需考虑轮毂电机激励对车辆平顺性的影响。关于轮毂电机激励对轮毂电机驱动汽车平顺性的影响的问题,不同学者从电机类型,偏心形式等多角度进行探索。
Wang Yanyang 等[7]探究开关磁阻电机偏心产生的不平衡磁拉力对轮毂电机驱动电动汽车平顺性的影响,得出路面和电机耦合激励下的车身加速度、悬架动挠度和轮胎相对动载荷明显高于路面单独激励(无电机激励)下的振动响应量的结论。Qin Yechen等[8]研究了轮毂电机
驱动汽车路面和电磁激励作用下的振动特性,并依此提出了具有动态吸振的减振结构。李哲等[9]建立了基于电机磁拉力和车辆垂直振动的机电耦合模型。研究了分布式驱动车辆的振动特性,并提出了抑制车辆振动负效应的主动电磁悬架优化方法。王艳阳[10]分析了开关磁阻轮毂电机不平衡
径向力导致的整车振动问题,以期进一步明确开关磁阻轮毂电机噪声和振动产生机理及控制方法。崔晓迪等[11]利用MAXWELL软件仿真得到定子偏心时的不平衡磁拉力,根据8自由度车辆模型仿真分析外转子永磁同步轮毂电机驱动电动汽车平顺性,仿真结果表明外转子轮毂电机不平衡磁拉力使轮胎动载荷明显增大,而车身加速度没有明显变化。
本文首先建立1/4车辆垂向振动模型;然后建立偏心引起的不平衡电磁力模型,仿真分析轮毂电机的不平衡垂向电磁力,研究电机偏心引起的垂向振动;然后对比分析IWM-EV不同偏心时在不平衡电磁力和路面输入双重激励下的垂向振动情况,分析不平衡电磁力对车辆垂向振动的影响。最后实验验证随机路面激励下和电机偏心引起的垂向振动。
1车辆垂直振动模型
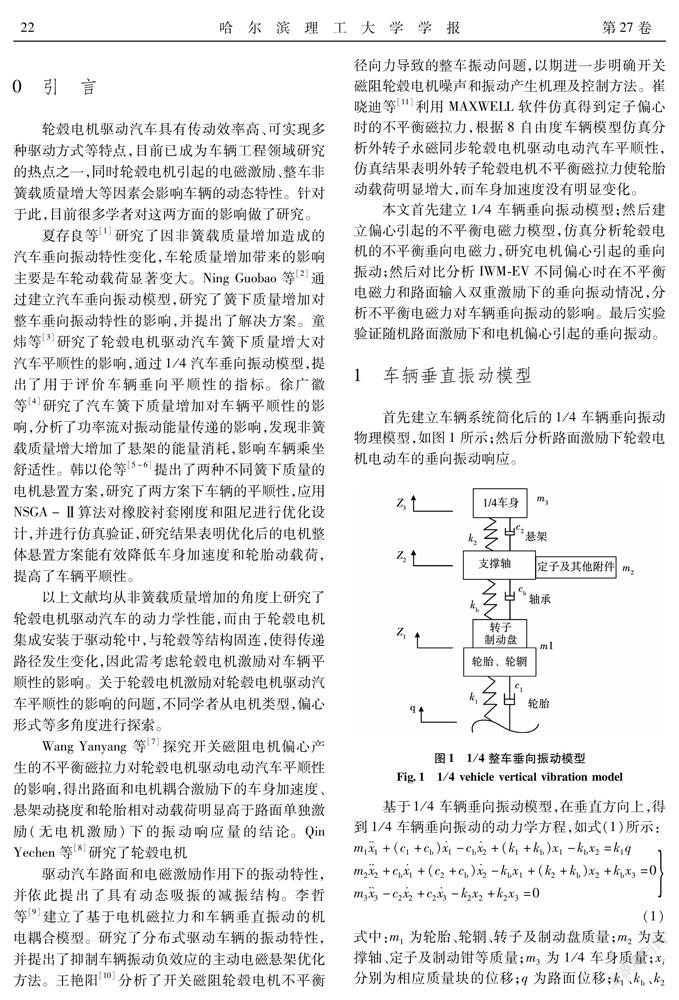
首先建立车辆系统简化后的1/4车辆垂向振动物理模型,如图1所示;然后分析路面激励下轮毂电机电动车的垂向振动响应。
基于1/4 车辆垂向振动模型,在垂直方向上,得到1/4车辆垂向振动的动力学方程,如式(1)所示:
式中:m为轮胎、轮辋、转子及制动盘質量;m为支撑轴、定子及制动钳等质量;m为1/4车身质量;x分别为相应质量块的位移;q为路面位移;k、k、k分别表示轮胎刚度、轴承刚度、悬架刚度;c、c、c分别表示轮胎阻尼、轴承阻尼、悬架阻尼。
1/4车辆垂向振动系统的动力学方程可写成:
2路面激励与不平衡电磁力激励模型
2.1路面激励
通过将空间频率范围[n,n]划分成m段小区间Δn,其中n为最小空间频率,n为最大空间频率,采用正弦波叠加方法建立随机路面输入的模型[12]如下:
式中:G(n)为每个小区间的中心频率n处对应的功率谱密度;θ为[0,2π]之间的随机数。
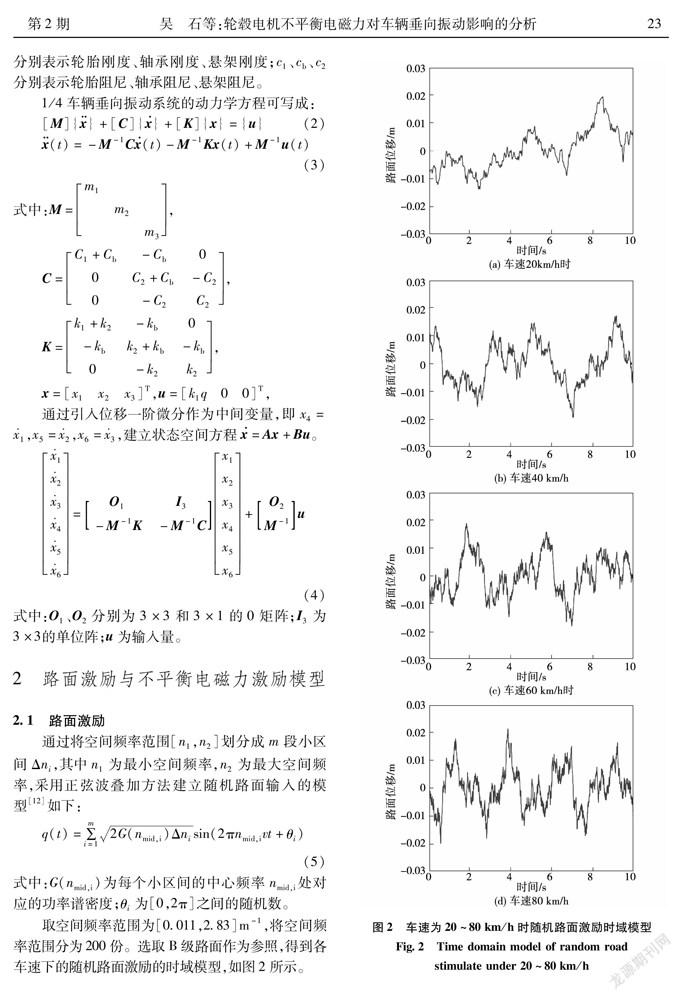
取空间频率范围为[0.011,2.83]m,将空间频率范围分为200份。选取B级路面作为参照,得到各车速下的随机路面激励的时域模型,如图2所示。
2.2轮毂电机偏心引起的不平衡电磁力激励
轮毂电机所采用的永磁同步电机,由于偏心所产生的不平衡磁拉力会产生振动和噪声架传至车身,也将影响车辆的垂向振动。
永磁同步电机偏心可分为两类:①静态偏心:转子回转中心与转子自身几何中心重合,但与定子轴线偏移了一定距离,这主要是由于轴承磨损,安装精度不高所致;②动态偏心:转子回转中心与定子轴线重合,但与转子几何中心偏离了一定距离 [14]。偏心示意图如图3所示。
如图3所示,θ为电机偏心量最大处的机械角度,e为电机偏心量。轮毂电机为永磁同步电机,具体技术参数如表1所示。
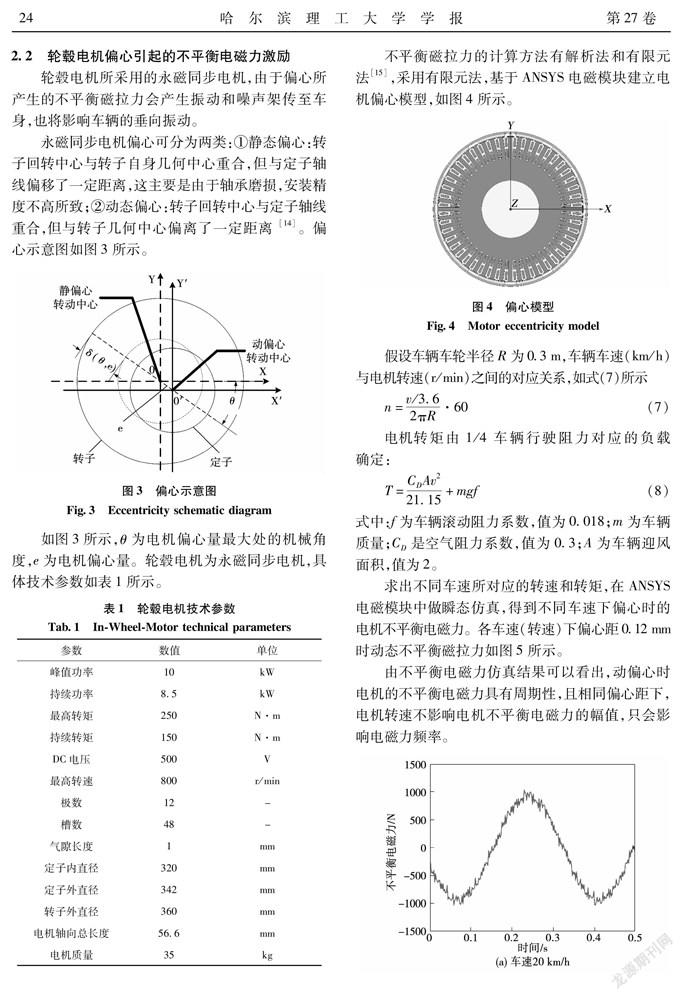
不平衡磁拉力的计算方法有解析法和有限元法[15],采用有限元法,基于ANSYS电磁模块建立电机偏心模型,如图4所示。
假设车辆车轮半径R为0.3m,车辆车速(km/h)与电机转速(r/min)之间的对应关系,如式(7)所示
电机转矩由1/4车辆行驶阻力对应的负载确定:
式中:f为车辆滚动阻力系数,值为0.018;m为车辆质量;C是空气阻力系数,值为0.3;A为车辆迎风面积,值为2。
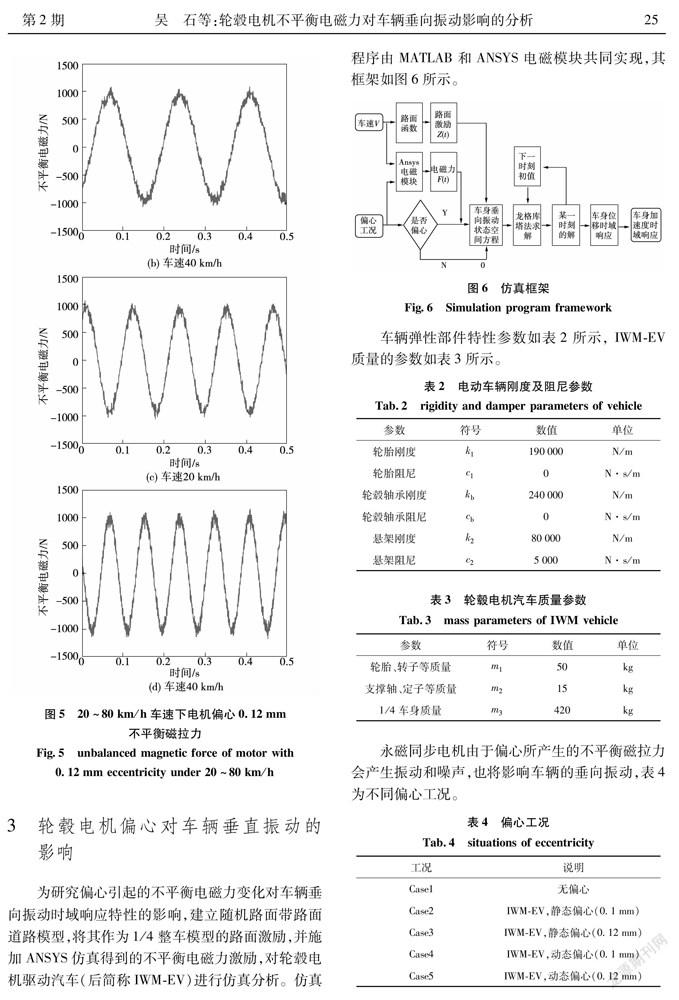
求出不同车速所对应的转速和转矩,在ANSYS电磁模块中做瞬态仿真,得到不同车速下偏心时的电机不平衡电磁力。各车速(转速)下偏心距0.12mm时动态不平衡磁拉力如图5所示。
由不平衡电磁力仿真结果可以看出,动偏心时电机的不平衡电磁力具有周期性,且相同偏心距下,电机转速不影响电机不平衡电磁力的幅值,只会影响电磁力频率。
3轮毂电机偏心对车辆垂直振动的影响
为研究偏心引起的不平衡电磁力变化对车辆垂向振动时域响应特性的影响,建立随机路面带路面道路模型,将其作为1/4整车模型的路面激励,并施加ANSYS仿真得到的不平衡电磁力激励,对轮毂电机驱动汽车(后简称IWM-EV)进行仿真分析。仿真程序由MATLAB和ANSYS电磁模块共同实现,其框架如图6所示。
车辆弹性部件特性参数如表2所示, IWM-EV质量的参数如表3所示。
永磁同步电机由于偏心所产生的不平衡磁拉力会产生振动和噪声,也将影响车辆的垂向振动,表4为不同偏心工况。
输入为路面激励和电机不平衡电磁力激励,通过求解状态空间方程,得到轮毂电机各偏心情况下的车辆及轮毂电机自身垂向振动时域响应。
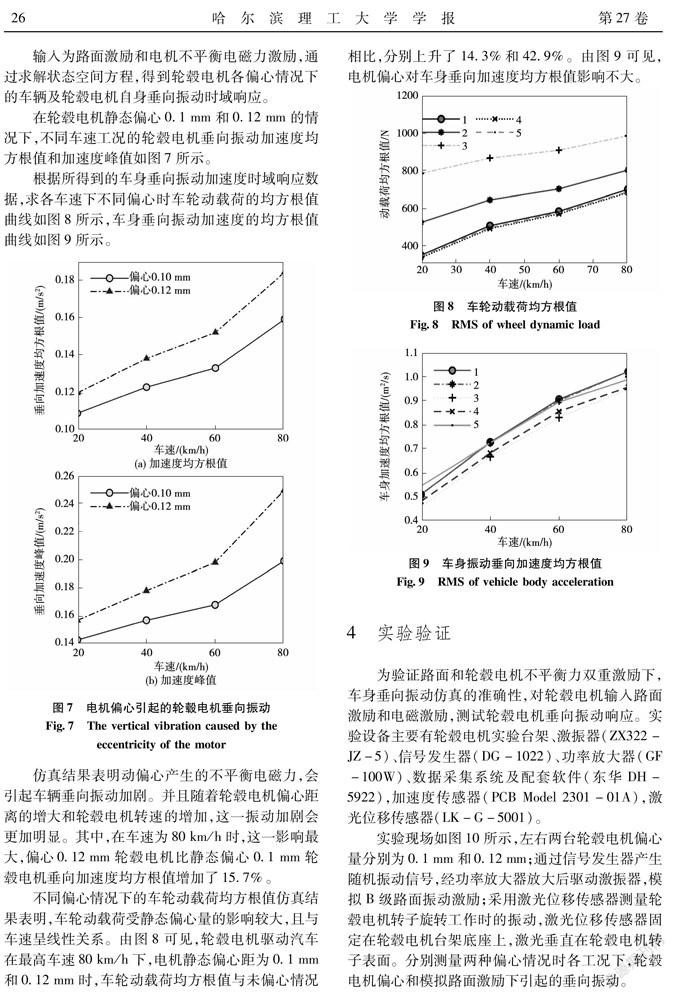
在轮毂电机静态偏心0.1mm和0.12mm的情况下,不同车速工况的轮毂电机垂向振动加速度均方根值和加速度峰值如图7所示。
根據所得到的车身垂向振动加速度时域响应数据,求各车速下不同偏心时车轮动载荷的均方根值曲线如图8所示,车身垂向振动加速度的均方根值曲线如图9所示。
仿真结果表明动偏心产生的不平衡电磁力,会引起车辆垂向振动加剧。并且随着轮毂电机偏心距离的增大和轮毂电机转速的增加,这一振动加剧会更加明显。其中,在车速为80km/h时,这一影响最大,偏心0.12mm轮毂电机比静态偏心0.1mm轮毂电机垂向加速度均方根值增加了15.7%。
不同偏心情况下的车轮动载荷均方根值仿真结果表明,车轮动载荷受静态偏心量的影响较大,且与车速呈线性关系。由图8可见,轮毂电机驱动汽车在最高车速80km/h下,电机静态偏心距为0.1mm和0.12mm时,车轮动载荷均方根值与未偏心情况相比,分别上升了14.3%和42.9%。由图9可见,电机偏心对车身垂向加速度均方根值影响不大。
4实验验证
为验证路面和轮毂电机不平衡力双重激励下,车身垂向振动仿真的准确性,对轮毂电机输入路面激励和电磁激励,测试轮毂电机垂向振动响应。实验设备主要有轮毂电机实验台架、激振器(ZX322-JZ-5)、信号发生器(DG-1022)、功率放大器(GF-100W)、数据采集系统及配套软件(东华DH-5922),加速度传感器(PCB Model 2301-01A),激光位移传感器(LK-G-5001)。
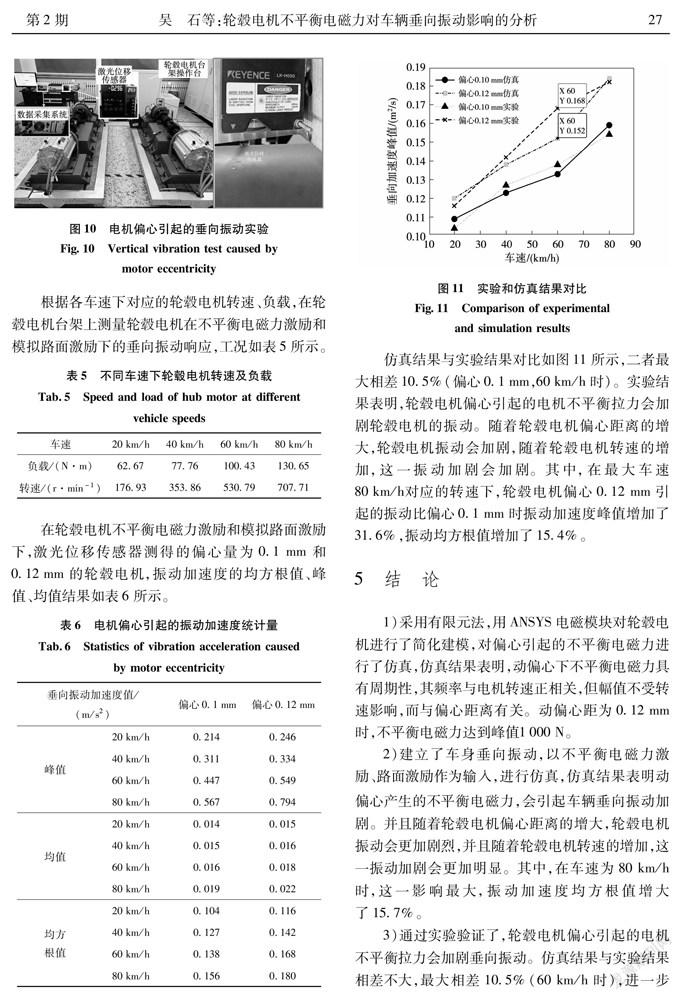
实验现场如图10所示,左右两台轮毂电机偏心量分别为0.1mm和0.12mm;通过信号发生器产生随机振动信号,经功率放大器放大后驱动激振器,模拟B级路面振动激励;采用激光位移传感器测量轮毂电机转子旋转工作时的振动,激光位移传感器固定在轮毂电机台架底座上,激光垂直在轮毂电机转子表面。分别测量两种偏心情况时各工况下,轮毂电机偏心和模拟路面激励下引起的垂向振动。
根据各车速下对应的轮毂电机转速、负载,在轮毂电机台架上测量轮毂电机在不平衡电磁力激励和模拟路面激励下的垂向振动响应,工况如表5所示。
在轮毂电机不平衡电磁力激励和模拟路面激励下,激光位移传感器测得的偏心量为0.1mm和0.12mm的轮毂电机,振动加速度的均方根值、峰值、均值结果如表6所示。
仿真结果与实验结果对比如图11所示,二者最大相差10.5%(偏心0.1mm,60km/h时)。实验结果表明,轮毂电机偏心引起的电机不平衡拉力会加剧轮毂电机的振动。随着轮毂电机偏心距离的增大,轮毂电机振动会加剧,随着轮毂电机转速的增加,这一振动加剧会加剧。其中,在最大车速80km/h对应的转速下,轮毂电机偏心0.12mm引起的振动比偏心0.1mm时振动加速度峰值增加了31.6%,振动均方根值增加了15.4%。
5结论
1)采用有限元法,用ANSYS电磁模块对轮毂电机进行了简化建模,对偏心引起的不平衡电磁力进行了仿真,仿真结果表明,动偏心下不平衡电磁力具有周期性,其频率与电机转速正相关,但幅值不受转速影响,而与偏心距离有关。动偏心距为0.12mm时,不平衡电磁力达到峰值1000N。
2)建立了车身垂向振动,以不平衡电磁力激励、路面激励作为输入,进行仿真,仿真结果表明动偏心产生的不平衡电磁力,会引起车辆垂向振动加剧。并且随着轮毂电机偏心距离的增大,轮毂电机振动会更加剧烈,并且随着轮毂电机转速的增加,这一振动加剧会更加明显。其中,在车速为80km/h时,这一影响最大,振动加速度均方根值增大了15.7%。
3)通过实验验证了,轮毂电机偏心引起的电机不平衡拉力会加剧垂向振动。仿真结果与实验结果相差不大,最大相差10.5%(60km/h时),进一步验证了轮毂电机不平衡力会加剧车辆垂向振动。在最大车速80km/h对应的转速下,轮毂电机偏心0.12mm引起的振动比偏心0.1mm时振动加速度峰值增加了31.6%,振动均方根值增加了15.4%。
参 考 文 献:
[1]夏存良,宁国宝. 轮边驱动电动车大质量电动轮垂向振动负效应主动控制[J].中国工程机械学报, 2006,4(1):31.XIA Cunliang, NING Guobao. Active Control of Vertical Vibration Negative Influences Induced by High Unsprung Mass of In-wheel-motor Electric Vehicle[J]. Chinese Journal of Construction Machinery, 2006, 4(1):31.
[2]NING Guobao, WAN Gang. The Present Research Situation of the Influences on Vehicle Vertical Performances Induced by Direct Wheel Drives System[J]. Automobile Technology, 2007(3):21.
[3]童炜,侯之超. 轮毂驱动电动汽车垂向特性与电机振动分析[J]. 汽车工程, 2014, 36(4):398.TONG Wei, HOU Zhichao. Analyses on the Vertical Characteristics and Motor Vibration of an Electric Vehicle with Motor-in-Wheel Drive[J]. Automotive Engineering,2014, 36(4):398.
[4]徐广徽,李以农,王艳阳,等. 轮边驱动电动汽车垂向振动负效应分析及吸振器设计[J].机械科学与技术, 2015, 34(11):1744.XU Guanghui, LI Yinong, WANG Yanyang,et al. Analysis on Vertical Vibration Negative Influences of In-wheel Motor Electric Vehicle and Shock Absorber Desig[J]. Mechanical Science and Technology for Aerospace Engineering, 2015, 34(11): 1744.
[5]韩以伦,李国珊,陈涛. 双激励下轮毂电机悬置构型对电动车平顺性的影响[J].哈尔滨工业大学学报, 2020,52(9):193.HAN Yilun, LI Guoshan, CHEN Tao. Effect of In-wheel Motor Suspended Configuration on Ride Comfort of Electric Vehicle under Dual Excitations[J]. Journal of Harbin Institute of Technology, 2020,52(9):193.
[6]韩以伦,李国珊,王强,等. 基于垂向振动负效应的新型轮毂电机电动汽车平顺性影响[J].科学技术与工程, 2019, 19(16): 363.HAN Yilun, LI Guoshan, WANG Qiang, et al. Ride Comfort of a New In-wheel Motor Driving Electric Vehicle Based on the Negative Effect of Vertical Vibration[J]. Science Technology and Engineering, 2019, 19(16): 363.
[7]WANG Yanyang, LI Pingfei, REN Guizhou. Electric Vehicles with In-wheel Switched Reluctance Motors: Coupling Effects Between Road Excitation and the Unbalanced Radial Force[J]. Journal of Sound and Vibration, 2016,372: 69.
[8]QIN Yechen, HE Chenchen, SHAO Xinxin, et al. Vibration Mitigation for In-wheel Switched Reluctance Motor Driven Electric Vehicle with Dynamic Vibration Absorbing Structures[J]. Journal of Sound and Vibration, 2018,419:249.
[9]李哲,郑玲,胡一明,等. 轮毂驱动电动汽车振动负效应及抑制方法[J]. 重庆大学学报, 2019, 42(2):20.LI Zhe, ZHENG Ling, HU Yiming, et al. Negative Vibration Effects of In-wheel Motor Electric Vehicles and the Method for Suppressing Them[J]. Journal of Chongqing University, 2019, 42(2):20.
[10]王艳阳,杨馥宁,商福兴. 轮毂电机不平衡径向力导致的整车振动研究进展[J]. 汽车技术, 2019(4):11.WANG Yanyang, YANG Funing, SHANG Fuxing. Research Progress of Vehicle Vibration Caused by Wheel Hub Motor Unbalanced Radial Force[J]. Automobile Technology, 2019(4):11.
[11]崔晓迪,提艳,瞿元. 非簧载质量和轮毂电机偏心对轮毂电机驱动电动汽车平顺性的影响[J]. 重庆理工大学学报(自然科学), 2020,34(9):1.CUI Xiaodi, TI Yan, QU Yuan. Effect of Unsprung Mass and In-wheel Motor Eccentricity on Rider Motor Driven Electric Vehicle Ride Comfort[J].Journal of Chongqing University of Technology (Nature Science), 2020,34(9):1.
[12]常志权,罗虹,褚志刚,等. 谐波叠加路面输入模型的建立及数字模拟[J]. 重庆大学学报(自然科学版) ,2004,27 (12):5.CHANG Zhiquan, LUO Hong, ZHU Zhigang,et al.The esTable Lishment and Digital Simulation of Road Input Model by Harmonic Overlay[J]. Journal of Chongqing University, 2004,27 (12):5.
[13]杨英武,韩舟轮,王柏生,等. 车辆通过减速带引起的振动分析[J]. 振动工程学报, 2007, 20(5):502.YANG Yingwu, HAN Zhoulun, WANG Bosheng.Vibration Analyses Caused by Vehicles Running Across the Speed Control Hump[J]. Journal of Vibration Engineering, 2007, 20(5):502.
[14]狄冲,鲍晓华,王汉丰,等. 感应电机混合偏心情况下径向电磁激振力的研究[J].电工技术学报, 2014, 29(S1):138.DI Chong, BAO Xiaohua, WANG Hanfeng, et al. Study on Radical Electromagnetic Excitation Forces of Induction Motor under Mixed Eccentricity[J]. Transactions of China Electrotechnical Society, 2014, 29(S1):138.
[15]ZHANG Ao, BAI Yan, YAN Bo, et al. Analysis of Nonlinear Vibration in Permanent Magnet Synchronous Motors under Unbalanced Magnetic Pull[J]. Applied Sciences, 2018, 8(1):113.
(編辑:温泽宇)
