3D打印定位导航模板辅助置钉在脊柱畸形矫形术中的应用
2022-05-24 03:43姜成浩黄永灿于滨生
脊柱外科杂志 2022年2期
姜成浩,石 岩,黄永灿,3,于滨生,3*
1.安徽医科大学北京大学深圳医院临床学院,深圳 518036
2.深圳市脊柱外科重点实验室,北京大学深圳医院脊柱外科,深圳 518036
3.深圳北京大学香港科技大学医学中心骨病研究所,深圳 518036
脊柱畸形常伴有脊柱旋转、形态畸形,如楔形椎、蝴蝶椎、融合椎、棘突扭转等,增加了矫形术中置钉的难度。透视辅助下徒手置钉是目前脊柱外科中最常用的置钉方法,其安全性和准确性已被证实,但对于畸形脊柱徒手置钉的风险较大,而螺钉的误置可能引起神经血管损伤、脑脊液漏、椎弓根折断及气胸等严重并发症[1-4]。对于传统徒手置钉技术,无论有无X线引导,准确置钉依赖于术者对解剖结构的熟悉程度和置钉的经验。有研究[5-8]表明,腰椎徒手置钉时椎弓根皮质穿破率为20.3% ~ 49.0%;胸椎椎弓根更小,螺钉误置的风险更高[9-10]。为提高置钉准确性,国内外研究者对多种置钉技术进行了探讨,包括三维CT术中导航系统、3D打印定位导航模板辅助置钉技术、机器人辅助导航系统、计算机导航辅助置钉技术等[11-13]。本研究通过设计、制作3D打印定位导航模板,探讨定位导航模板辅助置钉技术的应用价值及其准确性和安全性。
1 资料和方法
1.1 一般资料
本研究纳入2020年4月—2021年4月北京大学深圳医院采用3D打印定位导航模板(深圳艾科赛龙科技股份有限公司)辅助置钉矫形术治疗的9例脊柱畸形患者,其中男2例、女7例,年龄为15 ~ 79岁;诊断为成人特发性脊柱侧凸1例,青少年特发性脊柱侧凸3例,先天性脊柱侧凸1例,退行性脊柱侧凸2例,强直性脊柱炎并脊柱后凸2例。
1.2 3D打印导航模板的设计和制作
根据相关专家共识[14],基于3D打印技术及设计准确性的需要,CT数据需要满足相应的要求。本研究中,术前对所有患者脊柱畸形节段行螺旋CT薄层扫描及三维成像(双源,128排,SOMATOM Definition Flash,Siemens,德国),扫描层厚为0.75 mm,采集矩阵为512×512。然后将患者的脊柱CT数据以DICOM格式导出,再导入Mimics软件进行三维重建。在每个重建椎体模型上设计螺钉的最佳进钉位置和通道,并依此设计出能够与单个椎体后方骨性结构完全贴合的定位导航模板,通过3D打印机读取重建后的文件信息并逐层打印(图1)。术前对定位导航模板进行清洗、消毒及灭菌(低温等离子灭菌)处理,常温、常湿环境下晾干后备用。
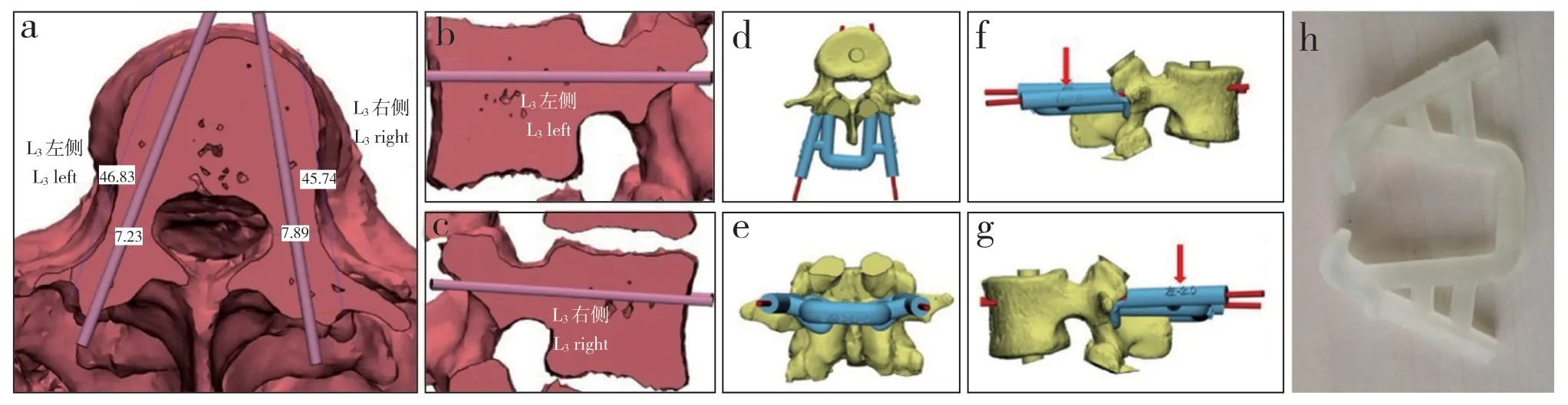
图1 3D打印导航模板的设计和制作Fig. 1 Design and manufacture of 3D printed positioning guide plate
1.3 手术方法
9例患者由同一医院的不同正高级别医师实施手术。患者全身麻醉后取俯卧位,C形臂X线机透视定位明确后,术野常规消毒、铺巾,于脊柱畸形节段做后路切口,逐层切开皮肤、皮下组织及筋膜,充分剥离椎体背侧骨性结构表面上的软组织,保留棘上韧带,完全显露背侧骨性结构。将单个定位导航模板放置于对应椎板背侧及棘突上,按压定位导航模板背侧的横向结构,并维持定位导航模板与椎体后方紧密贴合(图2a),确认贴合良好后,沿导向孔使用高速电钻(钻头直径为2.0 mm)进行钉道准备,然后使用丝攻,对钉道进行扩大和加深(图2b),之后使用球形探针对钉道壁进行完整性探查(图2c),确定钉道壁光滑后根据术前确定的螺钉型号进行置钉(图2d),不再对钉道进行修改,全部置钉结束后再次透视确认螺钉位置。为提高手术的安全性,所有患者术中均使用神经电生理监测系统进行神经功能监测,尽量避免手术操作对神经、脊髓产生损伤。

图2 手术过程Fig. 2 Operation process
1.4 置钉评价
有文献[15]报道,联合应用X线片和薄层CT平扫及三维重建来判断螺钉位置是目前最佳的方法,灵敏度达98.7%,准确率达90.0%。此外,基于横断面CT上2 mm增量的分级系统是被广泛接受的确定椎弓根螺钉置钉精度的方法[16]。本研究术后对所有患者进行薄层CT平扫及三维扫描,再通过PACS系统进行三维重建,可在冠状面、矢状面进行任意切割,观察螺钉的位置。由2位正高级别脊柱外科医师(非术者)分别独立评估置钉准确性,如意见不一致,则由第3位正高级别影像科医师决定。在CT上采用Mobbs-Raley分级标准[17]对螺钉位置进行评价:0级,螺钉完全位于椎弓根内;1级,螺钉突破椎弓根侧壁距离≤2 mm;2级,突破椎弓根侧壁距离> 2 mm,无相关并发症发生;3级,突破椎弓根侧壁距离> 2 mm,并发生相关并发症。本研究组认为,穿破椎弓根壁距离< 2 mm的螺钉都是安全的,且评定为3级的螺钉因发生并发症需要进行翻修。置钉准确率(%)=0级螺钉数/置钉总数×100%。置钉安全率(%)=(0级螺钉数+1级螺钉数)/置钉总数×100%。
2 结 果
所有手术顺利完成,治疗一般情况见表1。9例患者共置入螺钉118枚,其中34枚穿破椎弓根皮质(27枚穿破椎弓根内侧壁,7枚穿破外侧壁),9枚穿破椎体外缘(8枚穿破椎体外侧缘,1枚穿破椎体前缘)。0级螺钉75枚,1级螺钉24枚,2级螺钉19枚,置钉准确率为63.6%,置钉安全率为83.9%。所有患者均未发生神经、血管损伤等相关并发症,无患者行翻修手术。典型病例影像学资料见图3。
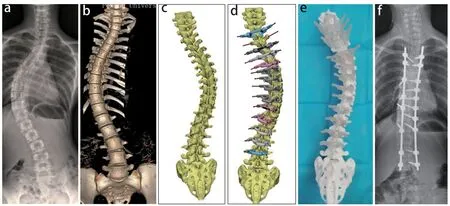
图3 典型病例影像学资料Fig. 3 Imaging data of a typical case
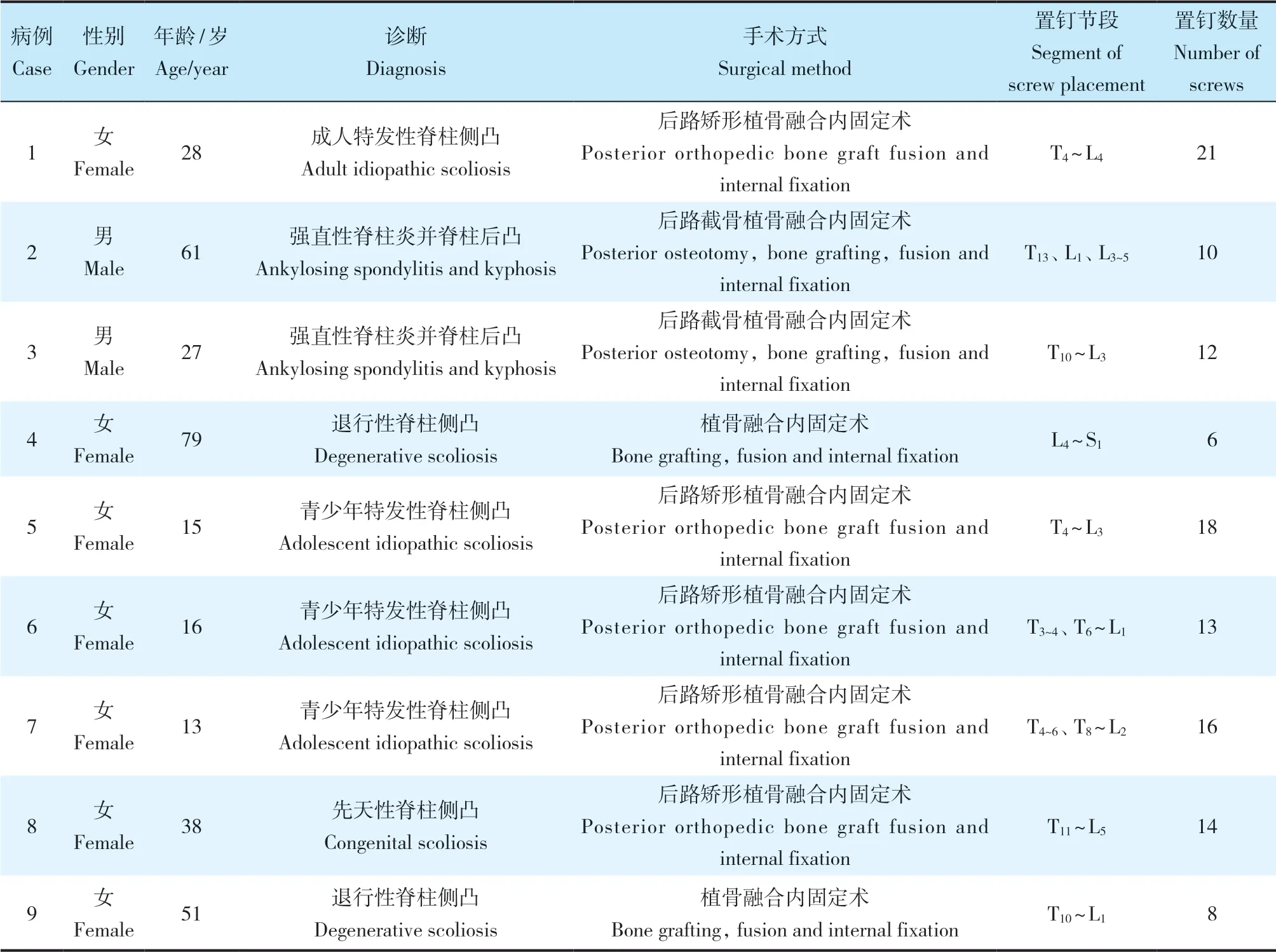
表1 病例信息Tab. 1 Case information
3 讨 论
椎弓根钉棒内固定系统广泛应用于脊柱外科手术,安全、准确置入螺钉是脊柱外科医师必须熟练掌握的临床技能。既往研究[18-19]报道,与徒手置钉相比,定位导航模板辅助置钉具有更高的准确性。但Chen等[20]在一项回顾性对照研究中发现,定位导航模板辅助置钉虽能减少术中透视次数、缩短手术时间,但置钉准确率与徒手置钉相比,差异无统计学意义。3D打印定位导航模板在脊柱外科领域的研究日益增多,本研究旨在初步探讨3D打印定位导航模板在脊柱畸形矫形术中应用的可行性,及其辅助置钉的准确性及安全性。
3D打印脊柱模型和定位导航模板是3D打印技术在脊柱外科中的重要应用。3D打印机制作的模型除骨性结构外,还可添加毗邻血管[21]。本研究中定位导航模板仅用于钉道准备,有研究[22]报道,将逐级扩大型3D打印导航模板用于辅助寰枢椎椎弓根置钉,该系统包括3种作用不同的导航模板,按顺序依次使用,辅助置钉,逐级扩大,提高了置钉准确率。此外,3D打印导航模板的材料大多为树脂类,有研究[23]采用激光融化成形技术制作金属定位导航模板,术中采用2枚铆钉将定位导航模板临时固定在椎板上,无须助手夹持固定。
3D打印定位导航模板的设计需要工程师和临床医师反复沟通,不断调整螺钉进针点、角度和长度,以达到最佳效果。3D打印定位导航模板技术基于椎体的骨性结构,不受解剖变异及椎体退行性变的影响,因此,术中要剔除椎体后方骨性结构上附着的软组织,充分暴露以确保定位导航模板与椎板紧密贴合,否则有可能导致置钉失败[18,24]。但是,患者在麻醉前后的畸形程度会存在一定差异,且软组织难以全部去除,进而导致实际情况与术前规划可能有所差异,因此,定位导航模板不能作为置钉的绝对标准。
3D打印脊柱模型和定位导航模板具有直观、方便等优势,适合临床教学和低年资医师的培训,对于年轻的脊柱外科医师而言,可以进行术前模拟操作[25]。而徒手置钉技术依赖术者经验、技巧和专业知识,需要一个较长的学习、实践过程[26]。医师还可采用3D打印脊柱模型和定位导航模板与患者及其家属进行更好地沟通,使患者能更直观地了解手术方案[27]。
术中使用X线透视的辐射暴露也是脊柱外科医师需要关注的重要问题之一,尤其对于青少年,辐射更易产生不良后果,包括辐射相关肿瘤等[28]。有研究[20,29]通过比较导航模板置钉和徒手置钉的透视次数发现,导航模板置钉平均透视次数明显减少,手术时间缩短,减少了患者的辐射暴露。在采用定位导航模板辅助置钉时,螺钉型号、进钉点和角度等都已通过术前规划和模拟置钉确定,术中无须再进行选择和判断,有助于缩短手术时间,提高置钉效率。但吴非燃等[30]的一项对照研究发现,导航模板置钉组和徒手置钉组的置钉时间差异无统计学意义,可能是因为在置钉前导航模板的定位增加了手术时间。需要注意的是,3D打印定位导航模板技术的应用可能会增加医疗成本,尤其对于多节段的脊柱畸形矫形手术,可能会限制其进一步推广应用。因此,对于无解剖变异的短节段脊柱外科手术,不常规推荐使用此项技术。
本研究的局限性:①纳入病例较少,置入螺钉仅118枚,且尚未对患者进行术后随访。②未开展病例对照研究,对于3D打印定位导航模板能否明显提高脊柱畸形矫形手术的置钉准确率并减少术后并发症的发生,还需进一步探讨。综上,准确置入椎弓根螺钉在脊柱畸形矫形手术中具有一定挑战性,本研究显示,3D打印定位导航模板在手术规划方面具有一定优势,定位导航模板辅助置钉准确性和安全性较高,具有一定的临床推广价值。
猜你喜欢
创伤外科杂志(2022年7期)2022-11-21
颈腰痛杂志(2022年4期)2022-11-18
健康研究(2022年5期)2022-11-07
中国伤残医学(2022年8期)2022-10-15
中国典型病例大全(2022年12期)2022-05-13
中国药学药品知识仓库(2021年18期)2021-02-28
保健与生活(2020年1期)2020-05-07
健康前沿(2019年8期)2019-09-10
中外医学研究(2019年18期)2019-08-19
科技资讯(2016年9期)2016-05-14