
基于STM32的通用化电机角度测试系统设计
2022-05-23 03:41:16佟亚珍桑尚铭冯荣尉
微电机 2022年4期
佟亚珍,桑尚铭,冯荣尉
(北京东方计量测试研究所,北京100094)
0 引 言
步进电机是一种将数字脉冲量转换为相应的角位移或线位移的特殊电机,具有反应灵敏、精确步进、无累计误差等优点[1],是航天器控制系统的核心组成部件[2],可以通过外部控制电路实现对航天器太阳帆板的驱动与控制,在航天领域得到了广泛应用[3]。
为了实现对航天器太阳帆板的精确控制,需要完成对所用步进电机各项性能指标的全面测试。目前,商业航天及重点型号发射任务呈逐年增多的态势,所应用的步进电机的种类随之增多,对步进电机及电机测试系统的需求也越来越多[4],为了进一步提升产能,满足用户及市场的需求,对电机测试系统提出了新的要求,传统的一类电机对应一套测试系统的方式已经无法满足多线并行的测试现状,实现不同种类电机的通用化测试势在必行。因此,本文研制了一款基于STM32的通用化电机角度测试系统,能够满足目前绝大部分电机的角度测试需求。同时进行了步进电机的性能测试试验,试验结果表明,研制的通用化电机角度测试系统测量准确、运行稳定、操作方便,为航天器太阳帆板驱动机构的高性能步进电机测试提供了完整的解决方案。
1 测试系统硬件设计
通用化电机角度测试系统选用STM32作为主控芯片,系统组成如图1所示。测试系统由嵌入式计算机、微控制器、脉冲发生电路、角度测量电路等组成。微控制器STM32从嵌入式计算机接收驱动脉冲参数,通过总线将参数传给脉冲发生电路,然后产生幅值、频率可调的脉冲电流控制驱动步进电机转动。信号采集电路将电流、电压等进行采集并提供给微控制器以实现对步进电机各项参数的测量。微控制器通过控制角度测量电路可以实现对步进电机角度的测量,其中零位角度测量尤为关键。

图1 系统组成框图
综合目前主流的电机产品,常见的角度测量方案主要有零位传感器、电位器、霍尔传感器和旋转变压器四种方案[5],因此本次设计的通用化电机角度测试系统需要兼容以上四类角度测量方案,设计不同的测量电路,以满足通用化测试需求。
1.1 零位传感器测量电路
零位传感器由发光二极管和光敏三极管组成。发光二极管和光敏三极管之间由不透光的物体遮挡,只有当步进电机通过零点位置时,发光二极管发出的光线透过,使光敏三极管导通,测试系统可以测得零位信号,通过外部测角设备测得的归零精度为0.05°。其中发光二极管需要恒流源电路进行驱动,通过光敏三极管集电极电流大小判断是否导通,因此针对本项功能,测试系统需提供用于恒流源输出的驱动电路以及三极管测量电路。
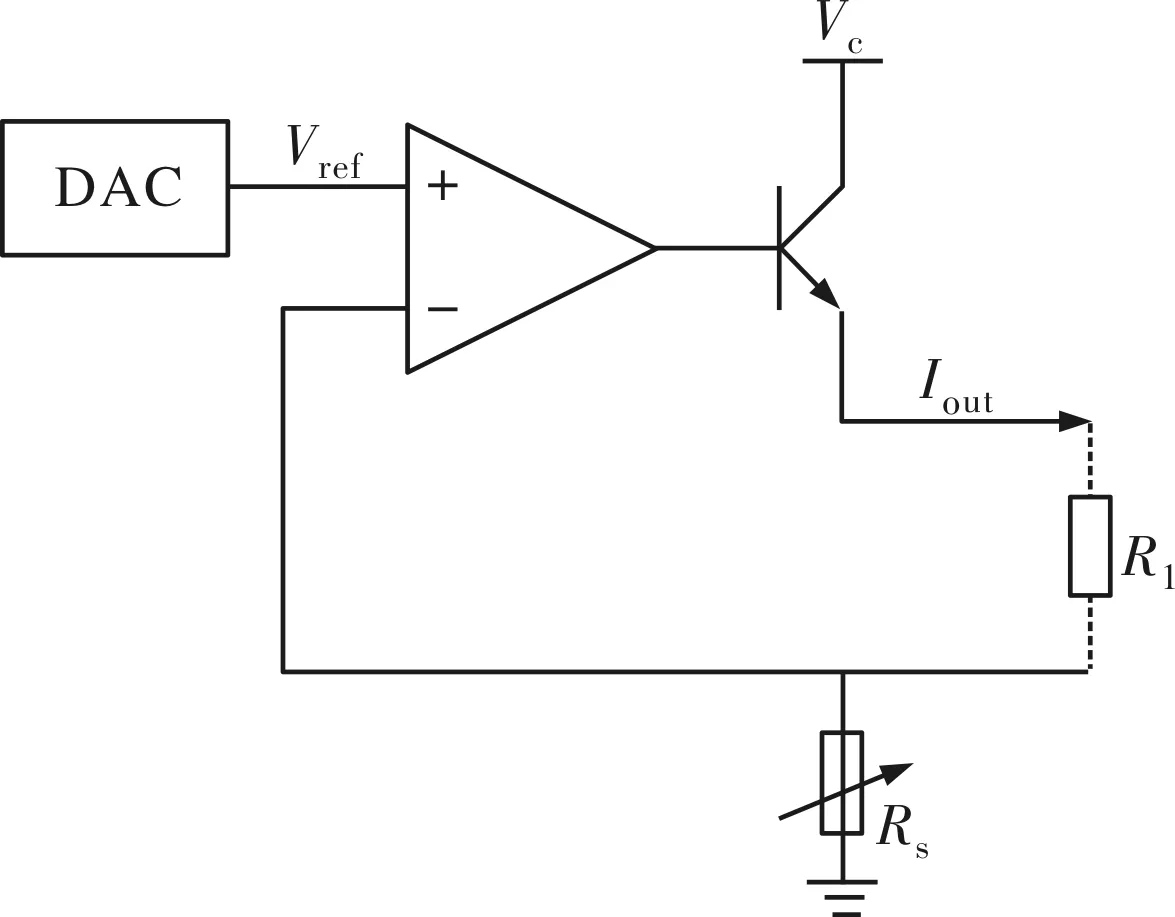
图2 零位传感器电流源电路
零位传感器恒流源驱动电路如图2所示。
Iout=Vref/Rs
(1)
式中,Iout为恒流源电路的输出电流(单位A);Vref为DA提供的基准电压源(单位V);Rs为取样电阻(单位Ω)。
当测试系统通过嵌入式计算机内部软件设置输出电流值时,电路通过改变模数转换器的输出电压Vref来调整输出电流;当测试系统通过旋钮任意调节电流时,电路中的取样电阻Rs随着旋钮变化,输出电流也随之连续变化。
零位传感器需要对发光二极管电流、正向导通压降、光敏三极管集射电压、集电极电流等参数进行测量,其测量电路如图3所示,发光二极管两端电路分别测量阳极电位U1(单位V)和阴极电位U2(单位V),则可得发光二极管正向导通压降为U1-U2,发光二极管电流ID为U2/R1(单位A);光敏三极管两端电路分别测量集电极电压U3(单位V)和发射极电压U4(单位V),则可得光敏三极管集射电压为U3-U4,光敏三极管集电极电流IC为U4/R2(单位A)。
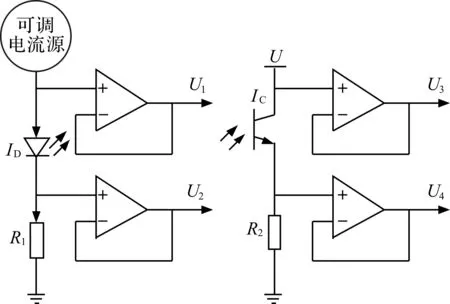
图3 零位传感器测量电路
1.2 电位器测量电路
电位器作为测角部件时,步进电机角度在-100°~+100°之间转动时,对应位置电位器的阻值为0 Ω~5 kΩ。在电位器两端加入基准电压5 V,电位器变化端电压为0 V~5 V,电气零位处于电位器的中值电压2.5 V位置。测量电路可以通过测量电位器输出端的电压,根据电压与角度的对应关系计算得到角度[6]。电位器测量电路如图4所示。
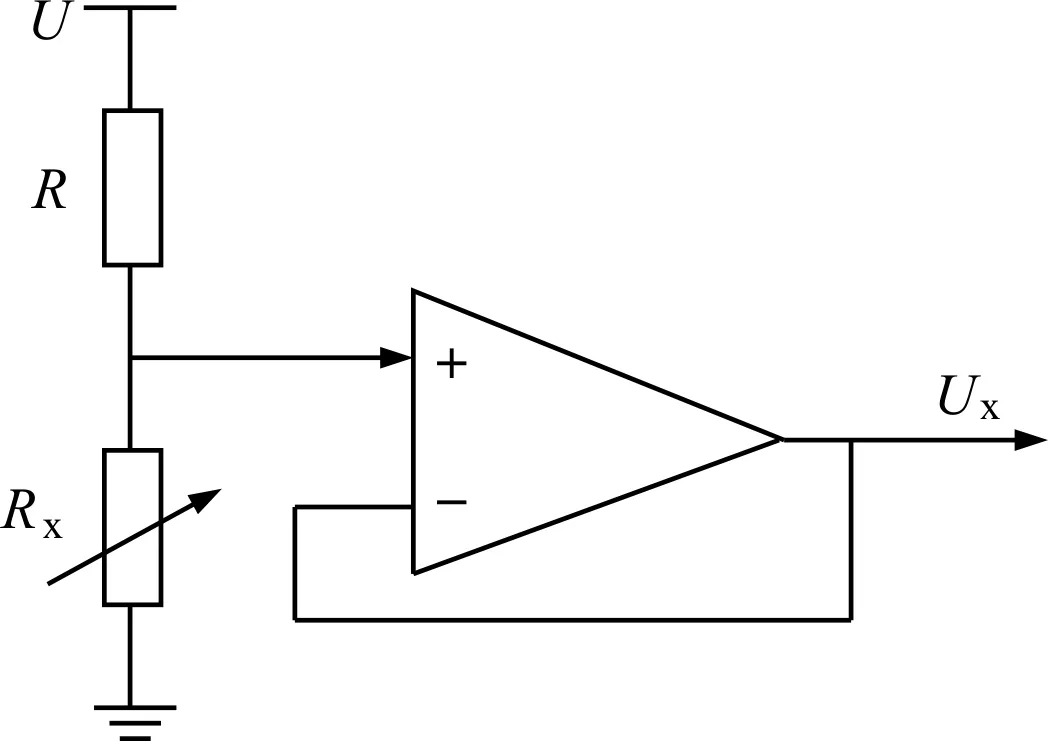
图4 电位器测量电路
(2)
式中,Rx为电位器电阻(单位Ω);R为保护电阻(单位Ω);U为基准电压(单位V);Ux为测得电压(单位V)。
硬件实现电路如下图所示。
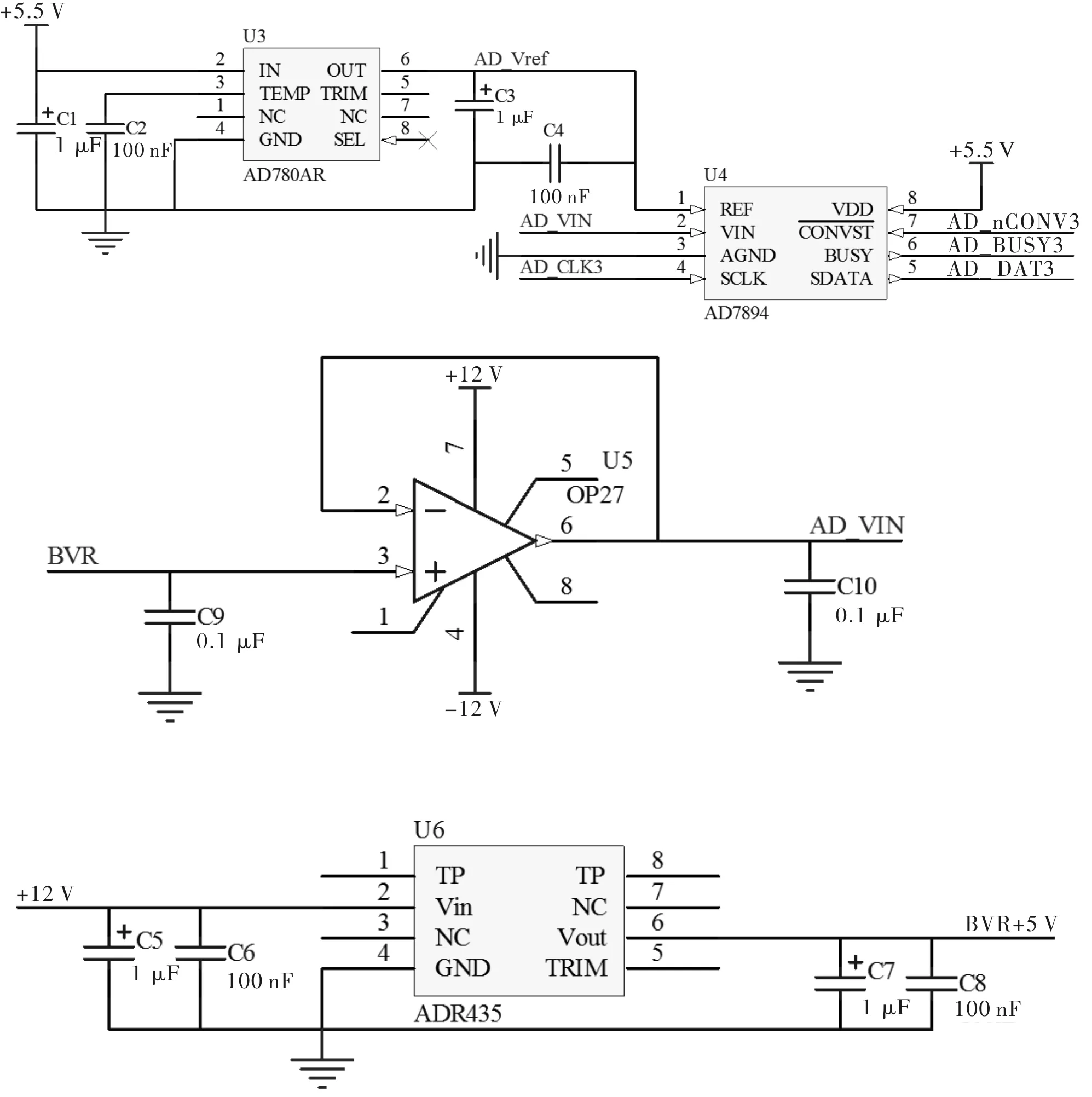
图5 电位器测量电路
上图中电压基准芯片的输出电压(5 V)BVR+5 V接电位器正端,运算放大器的输入端接电位器抽头端,电位器负端与测量电路地连接,电位器输出电压经过放大器跟随后进入AD7894。按图5所示电路测得电位器电阻值后,根据角度与电位器阻值之间的对应关系可以计算得出步进电机的角度值。AD7894是14位模数转换器,则测角精度为0.03°,测角精度略低于旋转变压器。
1.3 霍尔传感器测量电路
霍尔传感器是集成器件,可以将变化的磁场信号转换成数字电压信号输出。当步进电机转动到电气零位时,霍尔传感器输出电平由高到低,当步进电机转出电气零位时,输出电平由低转高。
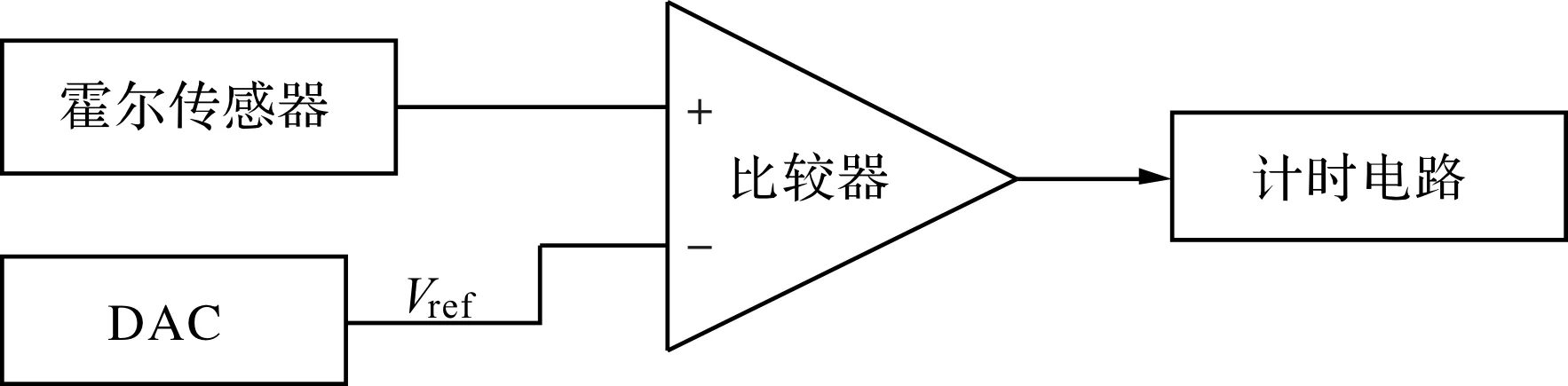
图6 霍尔传感器测量电路
霍尔传感器测量电路如图6所示,霍尔传感器产生的电压信号和DAC产生的电压基准通过比较器产生高低电平的方波,然后通过计时电路对比较器产生的低电平计时,即为零位宽度。其中DAC输出的基准电压略高于霍尔传感器输出的低电平。因此,当霍尔传感器输出电平为低时,此时比较器输出为高电平,计时电路开始工作,当霍尔传感器输出电平信号为高时,此时比较器输出高电平,计时电路停止工作。霍尔传感器只能用于测量步进电机的零位,通过外部测角设备测得的归零精度为0.05°。
计时电路采用FPGA实现,FPGA外部使用晶振作为基准时钟信号,通过内部编程实现一个计时器。理论上霍尔传感器输出的低电平应为地电平,实际上由于步进电机转动时产生的干扰及测试线缆扰动,霍尔传感器输出的电平往往大于地电平,约为0.2 mV左右,因此采用DAC输出基准电压的方式,设置DAC输出电压0.5 mV,可以有效避免计时电路的误触发。
1.4 旋转变压器测量电路
旋转变压器是一种高精度电磁感应式传感器,常用于测量步进电机的转角位置。旋转变压器由定子和转子组成,其中定子绕组也可称为激磁绕组,作为变压器的原边,接受励磁电压,转子绕组作为变压器的副边,通过电磁耦合得到感应电压,所以也常称为输出绕组[7]。
因此测试系统需要对旋转变压器输出激磁信号,对常见在轨航天器常用电机进行分析,激磁信号电压范围为3.5 V~5 V,频率范围为2 kHz~5 kHz,输入电流范围在100 mA以内。设计如下激磁电路产生方案,满足旋转变压器对激磁电压和激磁频率的需求。
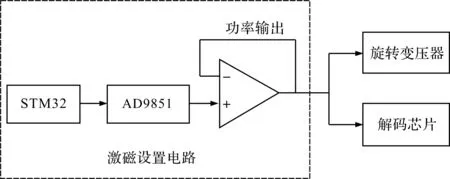
图7 旋转变压器激磁电路
激磁设置电路是由STM32单片机、AD9851和运算放大器组成的电路进行调节。首先STM32单片机从嵌入式计算机接收激磁电压和激磁频率等参数,通过STM32编程控制AD9851产生频率和电压可调节的正弦波信号,然后通过功率运放BUF634实现功率输出。
旋转变压器收到激磁信号后产生的正余弦信号通过旋变解码芯片AD2S80A进行解调。解调电路如下图所示。AD2S80A是一种特殊的16位模数转换器,用来测量旋转物体的转轴角位移和角速度,则旋转变压器的测角精度为0.0027°,测角精度较高,是最常用的测角方案。
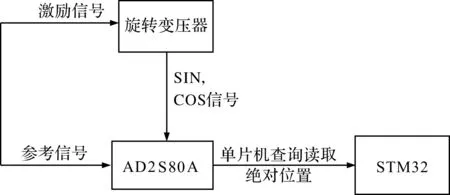
图8 旋转变压器解调电路原理图
1.5 脉冲发生电路
脉冲发生电路可以同时输出步进电机所需的四路脉冲信号,包括两路方波脉冲、正余弦脉冲或梯形脉冲。脉冲发生电路如图9所示,首先STM32单片机从嵌入式计算机接收驱动脉冲幅值、细分数和波形等参数,通过总线将驱动脉冲参数传给FPGA,然后FPGA在其内部实现的定时器作用下依次输出设定的值,方波脉冲直接输出,正余弦脉冲或梯形脉冲经过DA转换成模拟量后再输出。正余弦脉冲和梯形脉冲可以在配置文件中进行设置。每一路脉冲对应着一个数组,当数组中的数据按照索引从小取到大时,电机正转,当数组中的数据按照索引从大取到小时,电机反转。此外FPGA内部设置独立的计数器和定时器用来测量电机转动频率和驱动步数。

图9 脉冲发生电路
通用化电机角度测试系统的电压测量电路采用电阻分压的方式进行测量;电流测量电路采用电流传感器的方式进行测量;数据采集电路以模数转换芯片AD7894为核心,通过切换多个继电器和模拟开关实现多路模拟信号的采集,此外,模数转换芯片的数字控制信号与微控制器之间经过了磁耦隔离电路,这样可以减小数字电路对数据采集电路的干扰,在电路其它部分也采用了磁耦隔离电路,减小数字电路对模拟电路的干扰,提高驱动设备的测控准确度;主备份切换电路采用继电器实现电机的主备份切换和测角装置的主备份切换。
2 软件设计
测试系统软件的接口关系如下图所示,其中用户接口层是用户操作的窗口,对系统进行设置并与硬件电路进行信息交互;处理功能层是系统软件的核心层,包含九个功能模块,对用户接口层产生的指令进行响应,生成相应的测量或控制信息,通过硬件驱动接口对测试系统硬件进行相应的操作,同时将测试系统的状态返回给用户接口层,实现电机运行频率、实际运行步数、角度值、限位角度、电机电流、电机电压、主备份控制状态等的采集显示功能,电机的运行模式、运行步数、运行速度、限位角度、电机电流等的设置功能,远程监控以及数据库保存功能。
测试系统软件使用这种三层次结构,大大提高了软件功能模块的复用性,减少了代码的数量,提高了代码的使用效率。
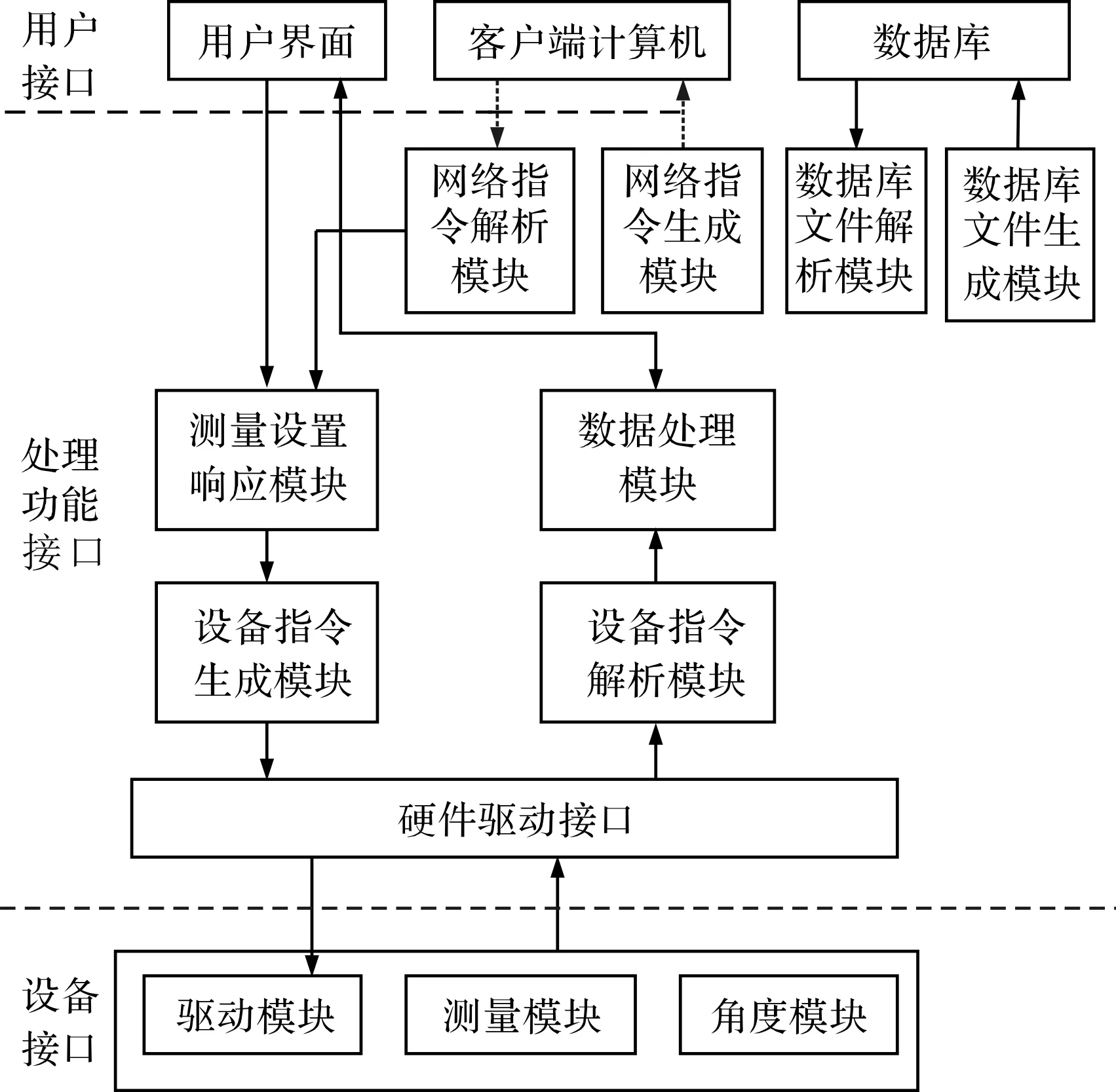
图10 测控软件接口关系
3 测试及验证
使用通用化电机角度测试系统分别与带有零位传感器、电位器、霍尔传感器和旋转变压器的步进电机连接进行测试,测试软件界面图如图11所示。使用示波器测量脉冲发生电路输出的波形图如图12所示,其中(a)为幅值2.5 V/64细分的正弦波,(b)为幅值4.3 V/64细分的正弦波,(c)为幅值2.5 V/8细分的正弦波,(d)为幅值2.5 V/64细分的梯形波。
经过测试验证,本文设计的测试系统可以设置输出不同幅值、不同细分的正余弦或梯形的脉冲电流以驱动不同类型的步进电机,可以对带有零位传感器、电位器、霍尔传感器和旋转变压器的步进电机进行测角,具有测量准确、运行稳定、操作方便的特点。
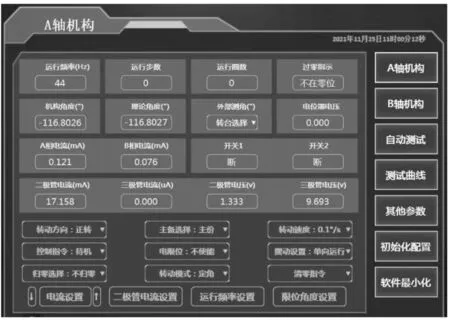
图11 测试软件界面图
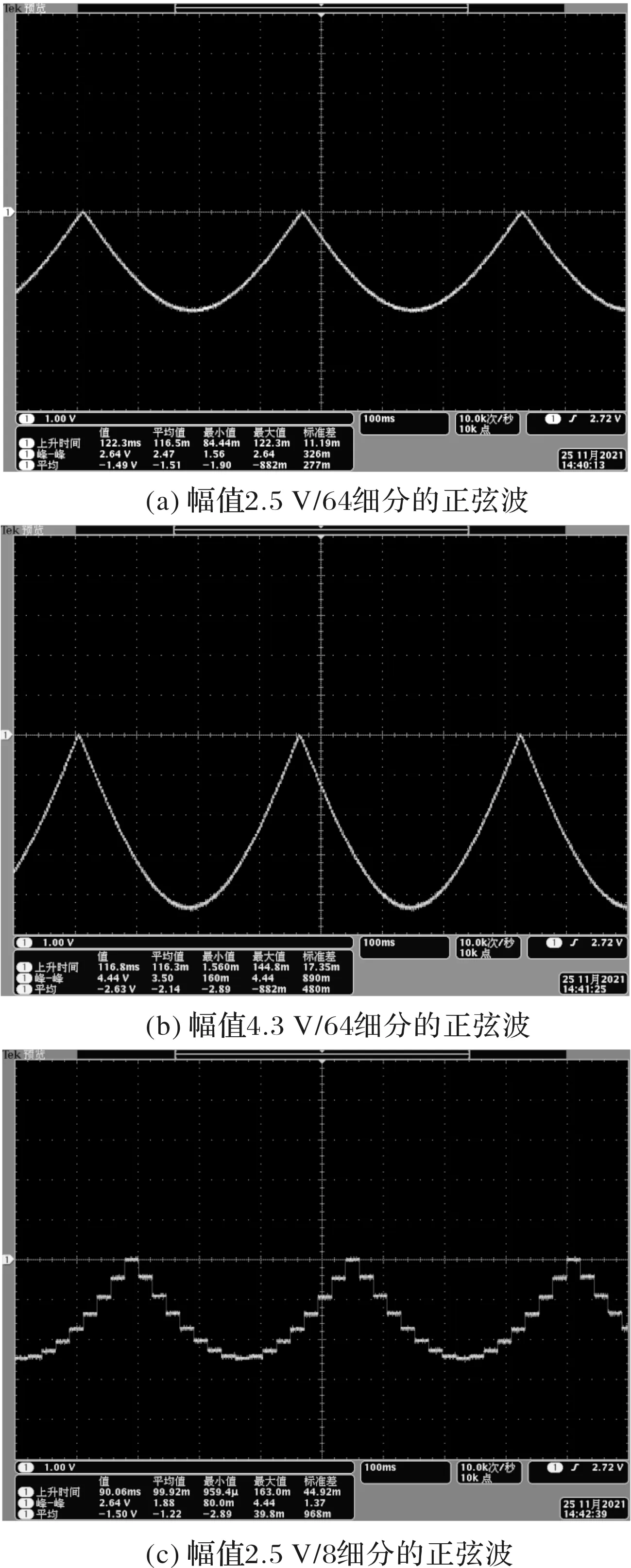
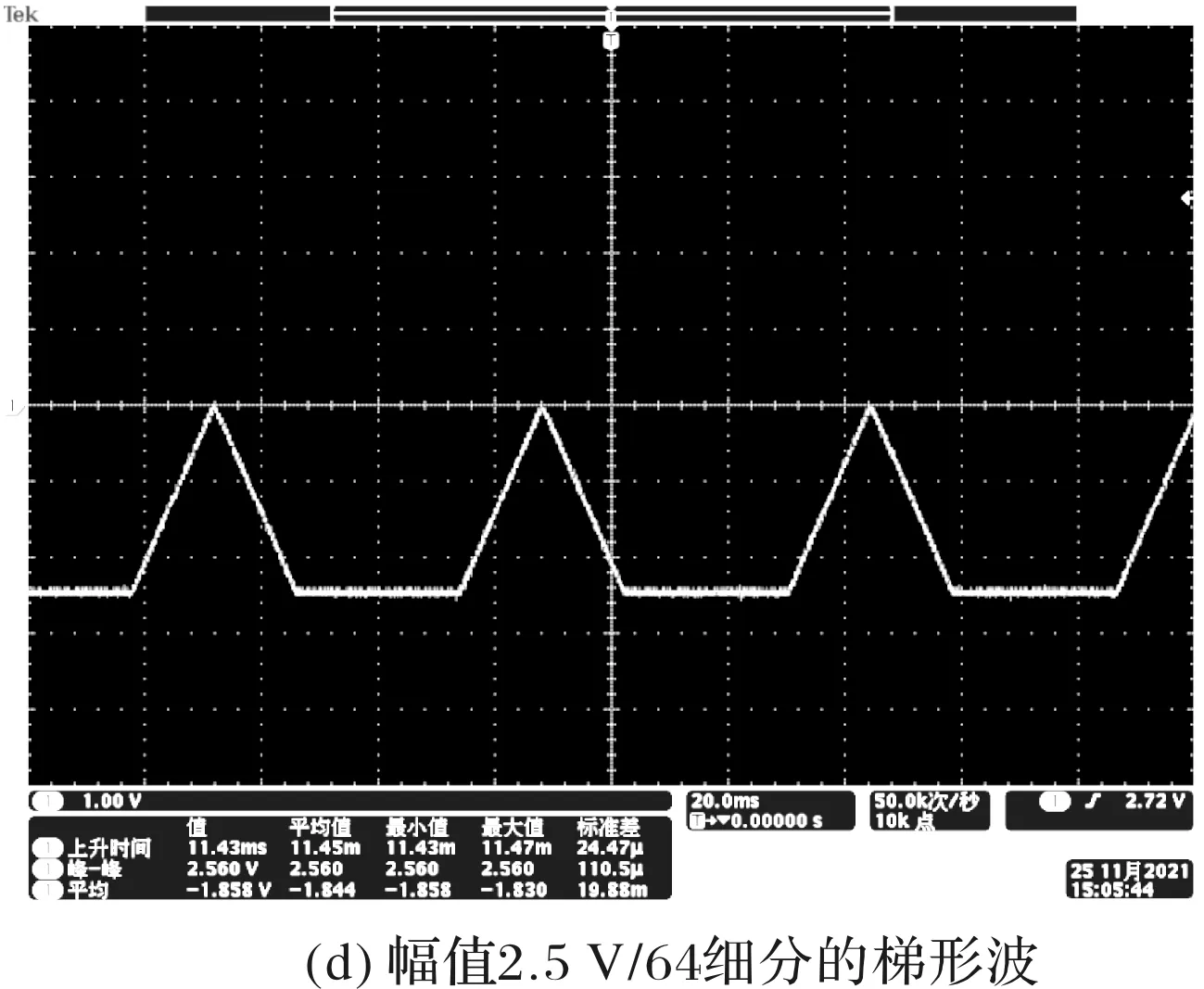
图12 脉冲发生电路输出的波形图
4 结 论
本文基于STM32单片机设计的通用化电机角度测试系统能够满足零位传感器、电位器、霍尔传感器和旋转变压器四种角度测量方案,能够根据需求设置输出正余弦脉冲或梯形波脉冲以驱动各类步进电机,满足目前绝大部分步进电机的角度测试需求。通过测试试验表明本测试系统测量准确、运行稳定、操作方便,为航天器太阳帆板驱动机构的高性能步进电机测试提供了完整的解决方案。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
数学物理学报(2022年3期)2022-05-25 13:33:28
现代机械(2021年3期)2021-07-12 00:47:42
客车技术与研究(2019年5期)2019-10-24 02:22:44
中成药(2017年12期)2018-01-19 02:06:54
中国信息技术教育(2016年23期)2017-01-03 22:24:15
电子设计工程(2015年3期)2015-02-27 12:03:53
决策与信息(2014年21期)2014-12-13 01:50:10
机械工程师(2014年4期)2014-07-01 23:36:27
中国医疗设备(2013年7期)2013-11-19 03:45:32
