陀螺边定向法在井巷贯通测量中的应用及误差分析
2022-05-16 07:29:26常丰国
山东煤炭科技 2022年4期
常丰国
(山西兰花科技创业股份有限公司伯方煤矿分公司,山西 高平 048400)
陀螺仪是煤矿井下施工放线的重要测量工具,作为精密测量定向仪器,对于指导巷道掘进方位和施工调向具有重要意义[1-4]。陀螺仪的主要工作原理是依靠指北定向为基准,可有效感知自转角的动量,从而找到在任意一条测线上的真北方位。由于陀螺仪在实际使用中不受天气和时间等因素的影响,具有全天候、全时段的定向功能,具有施工精度高、便于操作携带等优点。基于此,为保证伯方煤矿三采区与五采区准备巷道的准确贯通,对三采区与五采区准备巷道实施加测陀螺定向边工作。
1 实施方案
1.1 测量资料分析
测量工作主要内容包括测定井下两条特定的陀螺定向边,即三采区的G12-G14 边和五采区G13″-G14 边,利用原始资料,确定地表工业广场或者井下主要大巷的永久导线点,作为陀螺边定向起始点的控制点坐标,经过实测对比,确保误差精度符合要求。选择地表工业广场内变电所屋顶坐标和副井井口坐标作为起始点,设定编号为J1、J2。坐标点成果见表1。

表1 地面坐标点参数表
1.2 校正仪器常数
确定地面已知控制点的点位坐标后,连接两点为一条直线J1-J2,设定该条直线边方位角为A0,将陀螺仪架设在J2 点处,经过运行观测后,可得出A0的实际陀螺方位角为A0′,测量原理如图1,再计算两者的差值,可得出陀螺仪的定位常数Δ:
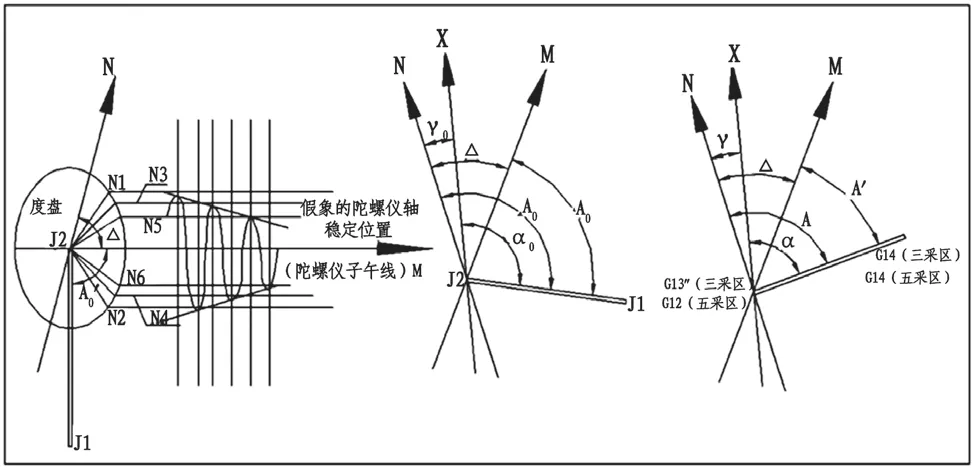
图1 仪器常?数校正测回原理示意图

在下井前和升井后对仪器常数各测定两次,可得到四个测回,将各个测回数值进行相互做差,互差均小于40″的误差值,就可判定符合误差要求。
1.3 井下陀螺边定向测量
根据井下施工现场的测量需要,拟定对矿井三采区G12-G14 边和五采区G13″-G14 边进行测量,与地面校正仪器常数的原理相同。在井下开展测量时,将仪器设定在G13″点和G12 点上,先测出两条采区陀螺边的定向方位角A′,得出结果后便可得到该条边地理方位角,编号为A,则利用公式:

对定向边同样进行两个独立测回。而测量精度要求,必须满足以下两个条件:其一,单次测量内测回陀螺方位角差值小于40″;其二,单次测量外测回陀螺方位角差值小于20″,即满足要求。
再设定地面两个永久点连线J1-J2 的坐标方位角α0,设定井下测量的定向边方位角α,地理方位角为A,放置陀螺仪的定点子午线收敛角γ0,则通过公式(3)计算可反映出三者之间的关系:

因此,为获得地面两点间的直线边方位角A0,可先测定计算出井下定向边的方位角α,再利用设置点陀螺仪的高斯平面求得经纬度或者平面坐标,从而求得陀螺仪定点的收敛角γ0。
1.4 井下定向坐标计算
综合上述计算公式和定向边及方位角的关系,可据此计算井下点坐标之间定向边的方位角。为了求得井下方位角,可通过以下系列公式进行计算:

而井下定点之间定向边的方位角α可计算:)

由上式计算,可得出三采区G12-G14 边和五采区G13″-G14 边的定向坐标方位角。
同理,按照方位角计算关系式,可以推算出任何待测的定向边坐标方位角,

通过关系式可得井下定向陀螺边方位角α井:)

式中:γ1为地面站点子午线收敛角;γ2为井下站点子午线收敛角;α陀螺1为已知测定陀螺边方位角;α陀螺2为未知待测陀螺边方位角;α地为地面测边方位角。
2 测量成果与精度分析
2.1 测边计算过程
2.1.1 测点坐标
地面和井下已知四个测点的坐标,即J1、J2、G13″、G12,其参数见表2。
2.1.2 坐标转换
根据上式中的测边方位角关系,可经过转换坐标后得出J2 点坐标为边起始点的边方位角,转换坐标参数见表3。

表3 转换坐标参数表
2.1.3 子午线收敛角计算
根据公式γ=sinB·(L-L1),可计算出子午线收敛角关系[3],L1为标准中央子午线117°,见表4。
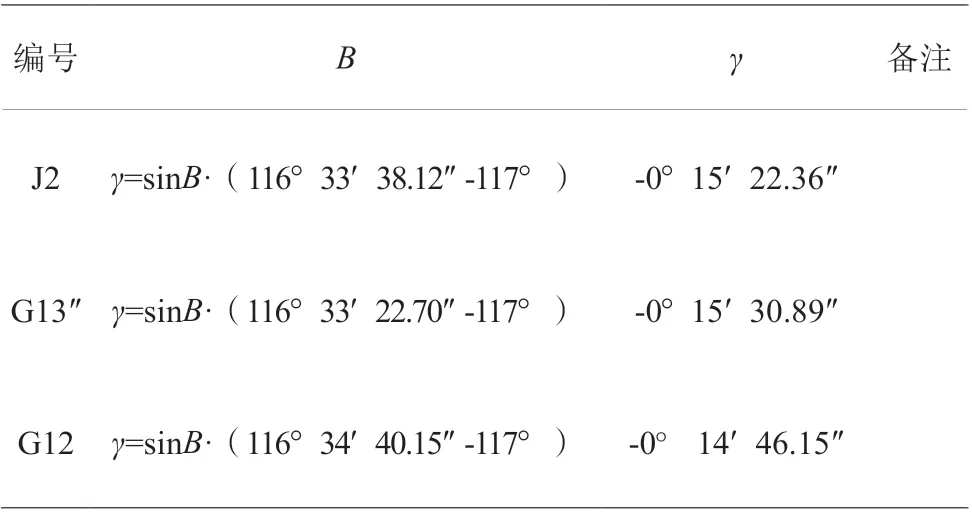
表4 子午线收敛角关系
2.1.4 多次测回陀螺边均值

表5 多次测回陀螺定向均值表
2.1.5 坐标方位角
根据已知公式α井=α地+α陀螺2-α陀螺1+γ1-γ2进行计算分析[4],已知地面测点测边J2-J1 边的坐标方位角223°37′24.69″,将数值代入公式中,计算得出G13″-G14 边的坐标方位角为224°45′10.68″,G12-G14 边的坐标方位角为85°58′50.37″。
2.2 精度分析
为满足测量精度的技术要求,减少数据误差和人为误差,对地面已知测边J2-J1 进行四次测回,对三采区G12-G14 边和五采区G13″-G14 边进行两次独立测回,然后对误差结果分别进行误差分析。
2.2.1 J2-J1 测边误差分析
地面J2-J1 测边的陀螺边定向方位角误差可由公式:

计算得出地面J2-J1 测边的方位角精度误差为6.45″,满足测量规程中要求不超过40″ 的规定,因此,精度符合误差要求。
2.2.2 三采区G12-G14 边误差分析
对于待测的陀螺边方位角可用下式:

由此可得测量边的陀螺方位角中误差值的均值为±4.58″。
而待测边的坐标方位测量中误差为:

经过每条定向陀螺边的互差计算,其测回互差值均小于测量规程中不超过40″ 的规定。
2.2.3 五采区G13″-G14 边误差分析
经过两次独立定向测回,同上式中三采区G12-G14 边测量方法一样,可测定陀螺方位角中误差值:

由此可得测量边的陀螺方位角中误差值的均值为±3.63″。
而待测边的坐标方位测量中误差为:

经过每条定向陀螺边的互差计算,其测回互差值均小于测量规程中不超过40″的规定。
3 结论
陀螺边定向成果的应用可有效帮助地面和隧道、井巷工程的贯通测量,尤其是长距离、高精度的测量要求条件,可避免人为误差和数值误差造成的测算失误,导致工程质量出现问题事故。
使用陀螺边定向方法在井下巷道施工时,为校准数据,必须严格执行每条测边的两遍独立测回作业,以减少测量误差对测量结果的影响。
井巷测量施工中必须确保所有测量数据的真实有效,并对测量方法进行评估分析,对测量结果反复验算,通过误差结果分析及时校正测量参数,为巷道顺利贯通提供依据。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
中国机械工程(2015年13期)2015-12-16 12:25:40
河南科技(2015年18期)2015-11-25 08:50:14
橡胶工业(2015年10期)2015-08-01 09:06:00
橡胶工业(2015年6期)2015-07-29 09:20:36