
基于双干扰机协同的SAR-GMTI可控压制干扰生成方法
2022-05-13 03:01纪朋徽邢世其代大海冯德军
信号处理 2022年4期
纪朋徽 邢世其 代大海 冯德军
(国防科技大学电子科学学院,湖南长沙 410073)
1 引言
合成孔径雷达地面运动目标指示(SAR-GMTI)系统,通过使用多个接收通道,不仅能够对地面静止目标进行成像,还能够获取地面运动目标信息、感知战场态势[1-3]。SAR-GMTI 的广泛使用,对重要军事运动目标构成巨大威胁,需要对其实施干扰,以保护地面重要军事运动目标[4-5]。
当前,对抗SAR-GMTI 的干扰技术根据干扰效果可分为两种,欺骗干扰技术和压制干扰技术[6-9]。其中欺骗干扰技术通过发射与目标回波相干的信号在指定位置生成逼真的虚假目标,所需功率较低,但对干扰系统要求较高,且生成的虚假目标很难做到与真实目标相似,容易被判断为假目标。压制干扰技术则通过发射和目标回波非相干或部分相干的干扰信号增强目标位置处的噪声,达到遮盖重要目标的目的,干扰效果好但所需功率较高。相对来讲,压制干扰技术较为实用,但对功率要求较高也是其一大缺点。其主要原因是,压制干扰技术因其生成的干扰信号和雷达回波信号存在非相干性,生成的干扰会扩散至整个距离向或者方位向,干扰压制区域无法灵活控制。因此,生成二维位置、大小均可控的压制干扰条带以降低干扰机的发射功率,将具有重要应用价值。
文献[10]结合运动调制和余弦调相给出了一种灵巧遮蔽干扰生成方法,能够实现干扰条带大小和方位位置可控,但该方法生成的遮蔽干扰在距离向上以干扰机为中心对称分布,无法灵活控制遮蔽干扰的距离向位置;文献[11]提出利用运动调制和步进移频调制的干扰方法,虽然能够生成位置、大小可控的干扰条带,但干扰条带在方位向的扩展与距离向的步进调频相关,一旦距离向干扰条带大小确定,方位向大小也确定,仍然无法实现方位向、距离向干扰条带大小分别可控。文献[12]提出了一种基于二维噪声卷积和方位向运动调制的密集虚假目标干扰技术,虽然能生成可控的压制干扰条带,但二维卷积难以在实际中实现;文献[13]提出了一种二维余弦调相加散射波调制的干扰方法,但生成的干扰压制区域难以控制且散射波干扰对功率要求较高;文献[14]提到了一种通过移频调制实现距离向位置可控,通过噪声卷积调制实现干扰条带大小可控的对SAR 干扰方法,但其无法对抗SAR-GMTI。以上文献中阐述的方法,都是单个干扰机独立工作,经相位中心天线(DPCA)技术对消处理后,干扰会被部分对消或全部对消,干扰性能下降,甚至无法保护重要目标[15]。对此,文献[15]提出了一种双干扰机协同干扰方法,只要两干扰机的方位位置满足一定的条件,干扰就不会被对消。
为此,本文结合运动调制、余弦相位调制和距离向移频调制的特点,并利用噪声卷积调制能获得部分处理增益的优势,同时基于双干扰机协同,提出了一种对SAR-GMTI 的可控压制干扰生成方法。该方法通过距离向移频调制和噪声卷积调制实现距离向干扰位置、干扰覆盖面积可控,通过方位向运动调制和余弦相位调制实现方位向干扰位置、干扰覆盖面积可控;并且因为使用了双干扰机协同,该方法生成的干扰能够对抗SAR-GMTI 而不被对消,还能利用噪声卷积调制获得部分处理增益,在实现距离向、方位向干扰区域覆盖位置、大小可控的同时,降低干扰机的发射功率。仿真实验验证了文中提出的干扰方法的有效性。
2 基于运动调制余弦调相的噪声卷积移频干扰模型
2.1 运动调制干扰模型
运动调制干扰是指干扰机对截获的信号进行运动调制转发,使转发出去的干扰信号具有运动目标特性,经SAR 成像处理后,将会生成方位位置偏移和散焦的干扰区域,从而影响真实目标检测。下面重点介绍运动调制干扰原理。
如图1 所示,一机载SAR 平台速度为v、高度为H沿平行于x轴正向飞行,合成孔径长度为L,干扰机坐标为(xj,yj);ta=0 时,SAR 平台刚好运动到投影点为O的位置,此时干扰机到SAR 的初始斜距为,一运动目标P,ta=0 时与干扰机坐标相同,沿距离向匀速运动,速度为vy。则任意时刻,P到SAR的斜距为:
若目标P静止,则任意时刻,P到SAR的斜距为:
因此,由运动附加的相位为:
把附加的相位Δφ(ta)调制到截获的SAR 信号上,就得到了运动调制干扰信号。假设SAR 发射的信号为线性调频信号,表示为:
因此,干扰机处的回波信号为:
其中σ表示干扰机处的散射系数。则进行运动附加相位调制后的干扰信号可以表示为:
经距离多普勒(RD)算法成像后有:
因此,距离向匀速运动调制干扰将在方位项生成相对干扰机位置偏移的干扰。
2.2 余弦调相信号模型
方位向余弦调相信号可以表示为[16]
式中,A为调制幅度,fc为余弦调相信号载频,βm为调制指数,fm为调制频率。
其信号频谱可以表示为:
其中Jn(·)为第一类n阶贝塞尔函数,据此可知,余弦调相信号的频谱含有无穷多个频谱分量,各边频分量的幅度正比于Jn(βm),忽略高阶信号分量,其带宽可以用卡森公式估计为:
即单频分量只取到(βm+1)次。
2.3 噪声卷积移频干扰模型
传统的噪声调制干扰包括射频噪声干扰、噪声调频干扰等直接与回波信号相加,在SAR 进行二维匹配处理时,无法获取增益,要想达到一定的干扰效果,对干扰机的发射功率要求较高。而噪声卷积调制干扰则是直接利用截获的SAR信号与噪声信号相卷积,假设调制得到的干扰回波信号为:
其中,⊗表示卷积调制因子,m(tr)为噪声信号可表示为N个幅度不同、时延不同的冲击信号组成[17],即:
由式(13)可知,噪声信号与干扰机截获后的SAR 信号相卷积后,相当于对干扰机处的回波信号进行多次延时和幅度放大处理,因此在SAR 进行二维匹配处理时能获得部分处理增益,这样就会在干扰机位置生成滞后的干扰条带。为了能灵活控制噪声卷积调制干扰生成的条带在距离向上的位置,根据线性调频信号时频耦合原理,可以对噪声卷积调制信号进行距离向移频处理。假设距离向移频量为Δf,则其对应的调制形式为exp(j2πΔftr),因此式(12)表示的干扰信号回波经过噪声卷积移频调制后可以写为[18]:
2.4 运动调制余弦调相噪声卷积移频干扰模型
干扰机对截获的SAR 信号进行运动调制和方位向余弦调相,能够生成方位向位置和覆盖宽度大小可控的干扰条带,但在距离向上无法扩展;对截获的SAR 信号进行噪声卷积移频调制,能够生成距离向上位置和覆盖宽度可控的干扰条带,但却无法在方位向扩展。为此,结合运动调制余弦调相和噪声卷积移频调制,将能生成距离向、方位向上位置和覆盖面积大小均可控的干扰压制条带。
根据式(6)和式(14),经运动调制余弦调相和噪声卷积移频调制后的干扰信号回波可以表示为:
经RD成像后有
为了生成较好的压制干扰效果,虚假目标的间隔应小于等于SAR 图像方位分辨率,此时在SAR 图像上干扰覆盖宽度为:
同时可知,假目标的间隔为距离向位置和覆盖宽度分别为:
3 对SAR-GMTI的干扰效果及性能分析
3.1 对SAR-GMTI的干扰效果
SAR-GMTI 通常利用静止杂波和运动目标的多普勒差异,基于多通道处理技术,对消杂波并显示出运动目标。DPCA 是SAR-GMTI 常用的一种对消处理方法,以下结合三通道SAR-GMTI 系统和DPCA 处理方法分析2.3 节运动调制噪声卷积移频干扰对SAR-GMTI的干扰效果。
图2为机载三通道的成像原理图,S1、S2、S3为三部天线,天线间隔为d,采用一发多收模式,天线S2发射信号,干扰机位置及载机情况与图1 中相同。Rj1(ta)、Rj2(ta)、Rj3(ta)分别为载机运动过程中干扰机到三个天线的距离,则有
假设SAR 发射信号与式(4)相同,则经运动调制和噪声卷积移频调制后,各天线接收的干扰信号回波分别为:
经时延配准及RD 成像后,三个通道的成像结果分别为:
其中,Ij(tr,ta)与式(16)相同。经过DPCA 杂波对消处理后,得到的两幅差图像分别为:
对式(24)取模后得到干扰经DPCA 处理后的结果为:
由式(25)可知,对于静止目标在峰值时有tam=,此时,静止目标将被对消;对于干扰信号在峰值时有,此时当(k为整数)干扰会被对消,特别是在干扰机方位附近的干扰将会被对消,干扰性能下降,当时,干扰将得以保留,实现对SAR-GMTI干扰。
3.2 双干扰机协同干扰
3.1 节给出了单个干扰机生成的压制干扰会在干扰机附近被对消,致使干扰性能下降。对此,文献[15]也进行了分析,并给出了一种基于双干扰机协同的解决方法,当两干扰机的方位向位置满足式(26)时,在两干扰机附近干扰都不会被对消。其本质就是,一台干扰机生成的压制干扰会在另一干扰机生成的干扰被对消的位置处达到最大值,这样合成干扰就能在任意干扰区域存在。
3.3 干扰功率增益分析
文中提出的干扰方法在距离向上使用噪声卷积调制,一方面可以控制干扰覆盖区域的大小,另一方面相比传统的噪声干扰提高了干扰功率增益,接下来对噪声干扰功率增益Kd进行分析[19]。Kd定义为系统输出干扰功率Jo与输入干扰功率Ji之比,即
假设噪声干扰信号时宽为Tn,对于传统噪声信号调制干扰,经距离向脉冲压缩后的时宽为Tn+Tp;对于噪声卷积调制干扰,压缩后的时宽为,由于压缩网络是无源的,根据能量守恒定律有
因此噪声卷积调制干扰相比传统噪声干扰带来的功率增益Kd为:
4 仿真实验与结果分析
为了验证文中提出方法的有效性,以机载三通道SAR-GMTI 系统为干扰对象,作以下仿真。SARGMTI系统参数如表1所示。
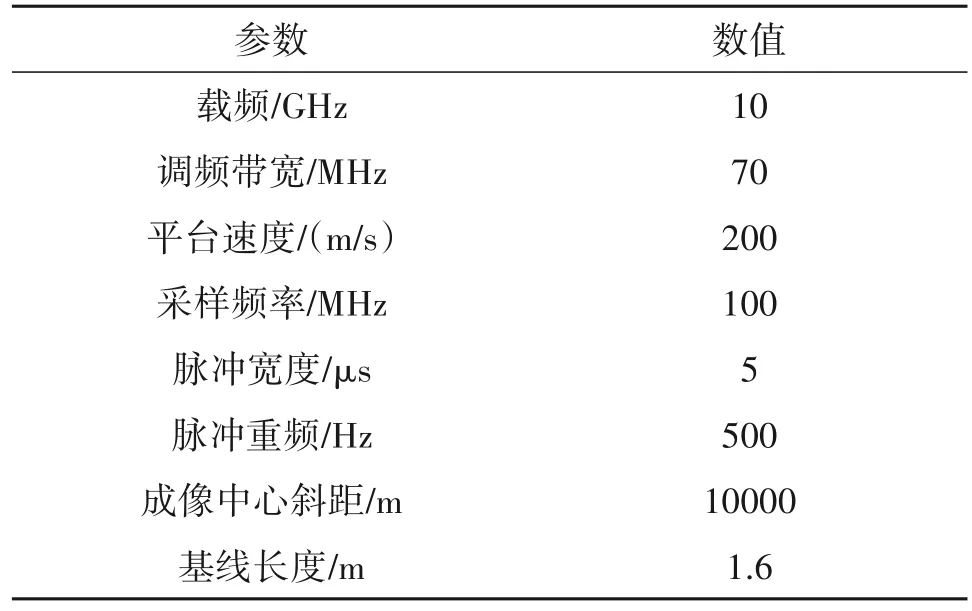
表1 仿真参数Tab.1 Simulation parameters
4.1 参数对干扰条带的影响
本文提出的干扰方法优势就是能生成位置和覆盖面积可控的干扰区域,其中方位向位置和宽度主要受运动调制参数和余弦调相参数调控,距离向位置和宽度主要受噪声卷积长度和移频量调控。为了验证这一点,下面将分析各个调制参数对SAR干扰压制区域的影响。假设干扰机放置在(0,10000)处,干信比JSR=-8 dB。
首先设定一组调制参数,其中运动调制参数vy=0.2 m/s,余弦调相调制指数βm=19、调制频率fm=1.33 Hz,噪声卷积长度Tn=2 × 10-7s,距离向移频量Δf=3.2667 MHz。根据此组调制参数生成干扰信号,其对应的SAR 干扰成像图如图3 所示,根据图3(b)中放大的干扰图像计算可知,生成的压制干扰覆盖区域中心位置近似为(-11,9979),面积近似为44 m × 33 m,与通过(8)和式(19)理论计算的干扰覆盖区域中心位置(-10,9980)、面积40 m ×30 m 基本一致。因此使用本文提出的干扰方法,生成可控的SAR压制干扰是可行的。
其次,改变各调制参数,再次进行仿真,得到的SAR 压制干扰图如图4 所示。由图4 可知,改变各调制参数的数值,可以灵活控制干扰压制区域的中心位置和覆盖面积。对比图3(a)、图4(a)、(b)中设置不同的余弦调相调制指数和调制频率,可以控制方位向干扰覆盖区域的面积;图4(c)中设置不同的运动调制参数,可以控制方位向干扰覆盖区域的中心位置;图4(d)中设置不同的噪声卷积长度,可以控制距离向干扰覆盖区域的面积;图4(e)中设置不同的距离向移频量可以控制距离向干扰覆盖区域的中心位置。因此,使用不同的参数调制,可以灵活控制SAR压制干扰覆盖区域的中心位置和面积。
4.2 对运动目标的遮蔽干扰效果
本小节仿真主要是在4.1节仿真的基础上使用双干扰机生成可控压制干扰,以此来验证本文提出的干扰方法能够对抗DPCA 对消并保护运动目标。为此设定五个运动目标,其初始坐标分别为(0,10010)、(0,10020)、(20,10030)、(40,10040) 和(40,10050),径向速度均为0.4 m/s,根据上面的分析可知具有径向速度的运动目标成像后方位位置会发生偏移,由SAR-GMTI 系统仿真参数可计算出偏移量为-20m,因此实际运动目标成像后的坐标为(-20,10010)、(-20,10020)、(0,10030)、(20,10040)和(20,10050)。为了能压制住所有的目标,干扰机至少需要在(0,10030)处生成40 m × 40 m 的干扰条带。
选用两台干扰机J1和J2进行干扰信号生成,假设干扰机J1放置在坐标(0,10000) 处,则根据式(26)可计算出两干扰机应相距约47 m 是合适的,不妨设干扰机J2的坐标为(-47,10000),两干扰机生成的干扰区域面积均为50 m × 60 m,根据(8)和式(19)可计算出干扰机J1的调制参数应当设置为vy=0 m/s,βm=19,fm=1.73 Hz,Tn=4 × 10-7s,Δf=-1.40 MHz;干扰机J2的调制参数应设置为vy=-0.94 m/s,βm=19,fm=1.73 Hz,Tn=4 × 10-7s,Δf=-1.40 MHz。设置雷达接收端的干信比为-3 dB。按照设定的参数,干扰机即可生成相应的压制区域。为了作对比分析,仿真中另设置了只用干扰机J1生成干扰的情况。
图5 给出了目标成像和压制干扰示意图,其中图5(a)中有五个点目标,由于背景杂波较强,五个点目标并不明显;但经DPCA 对消处理后,杂波被对消掉,目标清晰的显示出来,如图5(b)所示。图5(c)给出了加上单干扰机J1生成压制干扰的示意图,可以看到在目标所处的区域处生成了干扰压制条带,目标被遮盖住;但经DPCA 对消处理后干扰被部分对消,其中有一个点目标刚好位于干扰条带被对消处,因此未被遮盖住,如图5(d)所示。图5(e)给出了加上双干扰机生成压制干扰的示意图,目标均被遮盖住,经DPCA 对消处理后,干扰未被对消,目标依然被全部遮盖,如图5(f)。由此证明,本文提出的干扰方法生成的干扰能够压制住运动目标,并且能够对抗DPCA 杂波对消处理。
另外,为了验证本文提出算法的高效性,在同样的信噪比下对比了距离向使用传统噪声干扰方法调制的干扰效果。图6(a)和(b)给出了传统噪声干扰下的成像图,对比图5(e)和(f)可以看出,传统噪声方法生成的干扰覆盖整个距离向,但因干扰功率太小,部分目标未被压制住。因此,本文提出的方法能够更加精确的生成干扰条带,干扰效率更高。
5 结论
本文提出了一种位置和压制范围均可控的干扰方法,生成的干扰条带既能保护SAR 对静止目标的成像侦察,也能对抗SAR-GMTI 检测运动目标。其中,方位向的干扰位置及压制范围由运动调制和余弦相位调制加以控制,距离向的干扰位置及压制范围由移频调制和噪声卷积调制加以控制。使用本文提出的干扰方法,干扰机对截获的SAR 信号进行调制转发后,能在设定的位置和区域生成干扰条带,保护静止和运动目标。相比使用常规噪声调制的干扰方法,在相同干扰效果条件下,本文提出的方法生成的干扰更加精准,干扰效率也更高。
猜你喜欢
计算机应用与软件(2022年6期)2022-07-12
油气地质与采收率(2022年3期)2022-05-20
自然灾害学报(2022年2期)2022-05-10
中国学校体育(2021年10期)2021-04-26
航天电子对抗(2020年6期)2020-02-04
航天电子对抗(2019年4期)2019-12-04
舰船电子对抗(2019年5期)2019-12-04
无人机(2018年1期)2018-07-05
现代兵器(2016年6期)2016-06-25
电子竞技(2014年5期)2014-03-26
