不同场景下的交通能见度估算模型的应用
2022-05-12 23:49:25刘旗洋乔枫雪陈博宋智超季仁杰魏超时
大气科学学报 2022年2期
刘旗洋 乔枫雪 陈博 宋智超 季仁杰 魏超时


摘要能见度监测是交通出行安全的重要保障,尤其对机场和高速公路的大范围低能见度的监测和预警更为重要。在传统人工目测方法的基础上,以激光透射能见度仪为代表的仪器测量方法更为准确,但存在探测范围小、维护成本高、全覆盖耗资大的局限性。为了克服以上缺陷,使交通能见度的估计更为灵活、高效,本文基于机场气象站点观测数据、机场大雾以及高速公路低能見度图像,构建优化三种不同场景下的能见度估计模型,并探讨了不同模型的适用性。1)基于气象站点观测的能见度估计,运用相关系数矩阵和特征重要性分析筛选出相对湿度、温度、水平风速3个变量,并考虑昼夜分别构建三元三次多项式拟合模型,模型的决定系数(R2)可达0.9以上;2)基于机场大雾图像的能见度估计深度学习模型,利用尺度不变特征变换方法提取图像关键点的特征向量,输入全连接神经网络(fullyconnectedneuralnetwork)模型,加快训练过程并提高模型的可解释性;3)基于高速公路图像的能见度估计的反演模型,根据暗通道先验理论和能见度测量基本方程,计算大气光亮度和透射率,并根据图像距离信息得到单目图像的能见度,该方法无须预置目标物和像机参数,也不需要训练样本。本研究考虑了基于气象观测的物理模型与基于图像特征的深度学习方法,建立分别适用于具有机场常规气象观测,以及机场大雾低信噪比图像或高速公路低能见度单目图像时对交通能见度的估计,有效降低了能见度监测对观测仪器的依赖性。
关键词能见度估算;尺度不变特征变换;全连接神经网络;消光系数;暗通道先验
能见度指视力正常的人能将目标物从背景中识别出来的最大水平距离,是反映大气透明度和空气质量的一个重要指标,对人们的日常生活和交通安全至关重要(张文煜和袁九毅,2007;傅刚等,2009;鲍婧等,2018)。尤其是低能见度相伴随的雾霾天气下,高速公路通行与机场航班起降都将受到影响,也是引发交通事故的主要气象因素(张利娜等,2008;张驰等,2018)。目前,激光透射能见度仪取代传统人工观测,并具有较高的监测精度(聂凯等,2020),但其探测范围小、维护成本高,难以大面积覆盖。因此,基于视频图像和气象观测要素,构建能见度估算模型,能够降低对能见度观测设备的依赖性,从而扩大监测范围,具有现实意义和应用价值。
影响大气能见度的因子和机制复杂,主要的气象因子包括气压、湿度、温度、风速。已有研究表明,能见度与湿度呈现出负相关,与风速和温度呈现正相关(王晓丽等,2008;孟蕾等,2010;张剑等,2011;何佳宝等,2018)。而且,受到多时空尺度大气过程之间的非线性相互作用的影响,在不同天气条件、不同时间段内各因素及过程的作用不同,需要综合考虑热力、动力和水汽等因子的相互制约(张利娜等,2008;孟颖等,2019)。城市能见度与车辆尾气和工业排放的大气污染物有关(吴兑等,2006;白爱娟等,2014),还受到风向风速等扩散输送作用,而且细颗粒物浓度与相对湿度存在共同影响(王京丽和刘旭林,2006;潘洪密等,2015;白永清等,2016)。通过非线性模型能够体现气象因子与能见度的相互作用,但是不同气象要素之间可能存在共线性,输入过多变量会影响能见度拟合模型的效果(陈静和赵春生,2014)。
由于基于气象站数据的能见度拟合模型的精度有限,随着数字摄像技术的推广和深度学习方法的兴起,基于视频图像建立的能见度估计模型得到了快速发展。主要分为两类:一是利用图像特征建立能见度估计模型,提取图像边缘梯度、亮度、对比度等信息,通过支持向量机、随机森林、神经网络等模型构建与能见度的映射关系(许茜等,2013;Chaabani,etal.,2017;石玉立等,2018;姚镇海等,2019),通常需要对图像进行滤波、颜色空间转换、图像分割、感兴趣区选取等预处理以减少干扰与噪声;二是基于物理过程计算大气透射率和消光系数从而反演能见度,大量研究根据大气散射模型(段立春等,2017;范新南等,2019)和暗通道先验理论(赵瑞等,2016;周凯等,2016;欧斌娜等,2020)设计并改进了图像能见度估计模型;如MaoandPhommasak(2014)引入自适应的经验函数计算雾霾浓度系数,实现单幅图像的能见度计算;陈钟荣等(2019)提出以灰度图代替RGB图作为引导图,极大地提高了滤波效率,孟颖等(2019)结合自适应导向滤波和四叉树图像分割算法,能够在图像分辨率低和色彩失真等情况下提取更为稳定和准确的大气透射率参数。
与传统的基于气象站数据的能见度拟合模型相比,虽然基于图像特征和深度学习的能见度估计模型的精度有较大提高,但其需要大量具有较高质量的图像数据进行训练,而且在物理上缺乏可解释性(李伟等,2020);而基于物理过程的能见度估计模型,则常需要获得摄像机的高度、方向等参数,而且对于拍摄的景物也有要求,依赖车辆行驶轨迹或静态的参考目标物(宋洪军等,2015;胡平和杨旭东,2017;徐敏等,2017)。然而,由于机场和高速公路的安全运行受低能见度的制约严重,对雾霾天气下的能见度监测具有更高的要求,进一步提高模型的适应性和准确性十分重要。本文基于高时间分辨率的气象数据以及机场和高速的视频监控数据,构建了3个适用于不同场景下的能见度估计模型,在计算效率、模型精度和可解释性方面进行了改进和优化,并分析了模型的适用性和优缺点。
1基于机场常规气象观测的能见度估计模型
1.1分布特征与概率密度
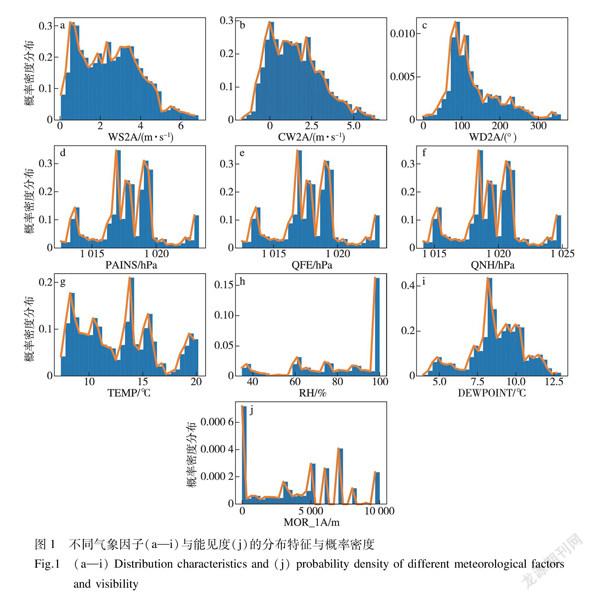
所用的气象观测数据来自南京禄口机场,时间分别为2019年12月15日和2020年3月12日,观测频率为逐分钟,包含了本站气压(PAINS)、飞机着陆地区最高点气压(QFE)、修正海平面气压(QNH)、温度(TEMP)、相对湿度(RH)、露点温度(DEWPOINT)、2min平均风速(WS2A)、2min平均风向(WD2A)、2min平均垂直风速(CW2A)和能见度(MOR)10个物理量,各个气象因子的数据分布和概率密度如图1所示,大多数变量都呈现非正态分布的特征,气温、露点和能见度都呈现多峰型分布;相对湿度和2min平均风向存在明显的峰值;水平风速和垂直风速、本站气压、飞机着陆地区最高点气压和修正海平面气压的分布特征存在高度的一致性。
1.2相关系数与特征重要性
能见度与不同气象因子的相关性分析显示(图2),能见度与相对湿度之间显著负相关(相关系数为-0.89),空气相对湿度越高,空气中的凝结核在水汽上富集,造成气溶胶的粒径增大,从而消光系数增大(沈家芬等,2007);能见度与气温之间显著正相关(相关系数为0.87),这是由于气温升高有利于水汽的蒸发,加快雾的消散,同时加强近地面热力对流运动,有利于污染物的垂直扩散;能见度与风速之间显著正相关(相关系数为0.62),近地面风速增大有利于水汽和颗粒物的稀释和扩散(白爱娟等,2014);能见度与气压和风向的相关系数较低,可能与天气形势的演变过程相关。此外,不同气象因子间的相关性表明,水平风速和垂直风速之间存在高度共线性。为了进一步筛选建模因子,在相关性分析的基础上,通过LASSO(LeastAbsoluteShrinkageandSelectionOperator)收缩估计方法计算各因子的重要性,采用L1正则化的线性回归,在回归系数的绝对值之和小于一个常数的约束条件下,使残差平方和最小化,以去除冗余变量(Tibshirani,1996)。该方法保留了子集收缩的优点,能够从高维变量中提取关键特征,解决变量间共线性问题。如图2所示,水平风速和垂直风速两者与能见度相关系数接近,但水平风速的特征重要性更高,因此最终选用相对湿度、温度和2min平均水平风速拟合能见度。
1.3多项式拟合模型的结果与评价
由于能见度与气象要素之间存在复杂的非线性关系,线性回归模型的拟合能力有限,实验表明三元三次多项式模型具有较好的拟合能力,且不存在过拟合情况。由于昼夜的光照和辐射不同,气象因子在不同时段对能见度的影响作用也不同(侯灵等,2014)。因此,有必要对昼(08—20时)和夜(20时—次日08时)分别进行模型拟合。如图3所示,三元三次多项式拟合模型能较好地再现能见度的整体变化趋势,能够捕捉能见度快速下降阶段。但是对于低能见度(<100m)的拟合会比实际偏高并存在小幅波动,可能是由于在低能见度情况下气象要素变化的作用减弱。另外,由于能见度观测数据的上限值是10000m,且高能见度(>5000m)的观测存在不稳定的突变,对于模型拟合和评价产生一定影响。
为了验证考虑昼夜差异的能见度拟合模型的优势,通过决定系数(R2)、均方根误差(RMSE)、平均绝对误差(MAE)三个指标,与不考虑昼夜差异的能见度拟合模型进行比较(表1)。可以發现,考虑昼夜差异后的评价指标整体有所提升,R2最高可达0.9以上,能够更好地体现气象因子对能见度的作用。模型对于高能见度的误差大于低能见度的误差,12月15日昼的评价指标明显低于其他时间段,这可能是由能见度观测数据在该时段的不稳定性造成的。因此,基于相对湿度、温度和平均水平风速的气象观测数据,同时考虑昼夜差异后,采用三元三次多项式模型,使得能见度拟合模型的准确度提高,虽然对低能见度的拟合略存在高估,但是能够很好捕捉到能见度整体上升和下降的变化趋势。
2基于机场大雾图像深度学习的能见度估计模型
2.1尺度不变特征变换算法
针对大雾天气下的图像信噪低的问题,考虑使用尺度不变特征变换(ScaleInvariantFeatureTransform,SIFT)算子(Lowe,1999,2004),该方法可以检测图像局部特征,对图像的旋转、缩放具有不变性,对视角变化和噪声具有稳定性。SIFT算法一共由四个部分组成:尺度空间极值检测、特征点定位、特征方向赋值、特征点描述。该算法具有独特性、多量性、高速性、扩展性的优势。如图4所示,该算法检测出的关键点主要集中在前景物和背景灯光上,能敏感地体现能见度变化信息,所得的图像关键点的特征向量作为深度学习的训练样本。
2.2深度学习模型的构建与训练
在全部样本(1860个)中,超过75%的能见度位于0~50m的区间内,存在严重的不平衡性(图5)。针对该问题,本研究通过分层抽样确定了训练集,训练样本一共560个,剩余1300个样本用于模型测试,以保证不存在数据泄露。
在进行图像预处理和特征提取后,构建全连接神经网络模型进行特征学习。相比于传统BP神经网络算法,全连接神经网络模型收敛速度快,为了模型过拟合,在全连接层之间设置了Dropout层,使得在训练过程中使部分连接层停止工作,以避免其对于某些局部特征的过度依赖。经过200轮次的训练,得到了全连接神经网络模型在训练集和测试集上的损失函数变化曲线(图6),损失函数先呈现快速下降趋势并达到平稳状态,在训练集和测试集上损失函数的表现具有较好的一致性。
2.3深度学习模型的预测与检验
图7展示了能见度估计深度学习模型在训练集和测试集上的表现,训练集上的拟合优度R2值为0.95,在验证集上的拟合优度R2值为0.88,也说明了模型的泛化能力较强。但是,随着能见度的升高,深度学习模型的模拟误差也在增大,而且预测值比实际值偏低,可能与高能见度的训练样本数量较少有关。
3基于高速公路图像的能见度估计物理反演模型
3.1图像的变化特征与关键区域
基于100张高速公路监控视频截图(2016年4月14日06时30分26秒—07时39分11秒),图像的变化不够明显,大部分区域被雾气笼罩。为了提取图像中反映能见度变化的关键信息和区域,通过图像方差分析逐个像素点的变率大小。从图8a可知,远处的像素方差呈现明显的波纹状结构,除去第35张图像(有一辆车)后,车道线在景物中的变化最为显著,并确定了如图8b所示的关键区域。
3.2能见度测量基本方程
影响能见度的主要因素是物理光学传播状态。光在介质中传播时,受颗粒物吸收和散射的影响会有一定的削弱和增强。景物亮度L0与距离d的关系,公式如下:
其中:L为接收到的亮度;Lf为天空亮度;σ衰减系数(即大气消光系数);L0e-σd描述了物体亮度的削弱;Lf(1-e-σd)描述了大气背景亮度的增强(Hautiereetal.,2006)。
由此推出的朗伯比尔定律揭示了对比度随距离变化的衰减规律:
这里F和F0分别表示观测和入射的光照强度,世界气象组织使用对比阈值为0.05时的距离作为气象光学视程(MeteorologicalOpticalRange,用MOR表示)(WMO,1996),由此可以推出大气能见度与消光系数之间的计算公式:
参数σ称为衰减系数,由散射系数β和吸收系数α组成。但是当观察目标与观察者较近时,大气的吸收效果可以忽略,因此计算散射系数β是求解能见度的关键大气参数。
3.3暗通道先验理论
暗通道先验法(DarkChannelPrior,DCP)是图像去雾的经典算法,揭示了在非天空的局部区域中,某一些像素及其周围区域会存在至少一个颜色通道具有很低的值的规律(Heetal.,2011,2016),并且该规律适用于绝大多数的生活场景。因此本研究中,取图像中每个像素点RGB三通道的最小值,并进行一次最小值滤波,得到暗通道灰度图,公式如下:
式中:Jc为无雾图像;J的三个颜色通道的一个;Jdark为无雾图像J的暗原色。对于J的非天空区域,Jdark的值趋近于0。
由大气散射模型可以描述光线在传播过程中的衰减过程(NarasimhanandNayar,2002),也是被广泛使用的雾天图像光学模型,公式如下:
式中:I(x)为输入图像;J(x)为清晰图像;A为天空亮度,A主要用图像中最亮的0.1%点的均值代替;t(x)为大气透射率。
其中t(x)大气透射率的计算参考周凯(2017)的研究,并取去雾系数ω=0.95,具体计算公式如下:
3.4物理模型的构建与结果
利用图像的局部区域的像元特征和距离观测位置的距离推算散射系数β,公式如下:
式中:R(x)为所选局部区域;pR为所选局部区域的像元数量;D为参考点与摄像头的距离。
虽然无法获取摄像机与目标物的距离信息D,但是高速公路的车道线间隔约为9m(国家质量技术监督局,2009)。在低能见度天气下,车道线两端易于定位,并且对能见度变化较为敏感。此处假设摄像机与图像两个参考点的距离差值约等于图像两个参考点之间的距离,因此如图9所示,车道线两端点的图像像素坐标分别为(230,277)和(284,350),然后,分别以这两个参考点为中心,选择7×7的窗口作為局部区域。由于景物范围较小,假设同一图像的大气透射率t(x)和大气光亮度值A是恒定的。
利用车道线间隔可以间接计算散射系数β,公式如下:
将散射系数β带入能见度测量基本方程,可以得到能见度的反演方程,公式如下:
最终得到了高速公路的能见度的变化曲线如图10所示,呈现显著的波动上升趋势。由于缺少高速公路的能见度实测数据,尚未将能见度估计结果与观测进行对照。但该方法主要是基于大雾低能见度图像,利用暗通道先验理论,结合大气能见度物理方程,构建基于物理光学特征并适用于高速公路的单目图像的能见度反演模型。
4讨论和结论
大气能见度是影响机场、高速公路交通安全的重要因素,低能见度状况更是人们出行安全的主要威胁,对于低能见度情况的监测和预警是交通领域的重要组成部分。但是大气能见度受到大气物理和化学过程、多因子和复杂机制的影响,精确估算仍具有挑战性。
目前,较为精确的仪器测量(以激光投射仪为主)存在探测范围小、维护成本高、全覆盖耗资大的局限性。因此,亟须对缺乏激光投射仪观测的情况下,基于机场或高速公路的观测或者视频图像等,构建合理的模型进行能见度的有效预估。本文采用“华为杯”研究生数学建模竞赛数据,基于机场常规气象观测、机场大雾低信噪比图像、高速公路低能见度单目图像,构建并优化三类情况下的能见度估计模型,并对其模型进行适用性和优缺点分析。
1)基于气象变量的能见度估计模型:通过相关系数矩阵和特征重要性分析,筛选出相对湿度、温度、2min平均风速作为建模因子,由于昼和夜的光照、辐射条件差异,分别构建昼和夜的三元三次多项式的能见度估计方程,提高了模型对能见度的整体估计能力,R2最高可达0.9以上。该模型可以捕捉能见度的整体变化趋势,再现能见度快速降低的过程,但是与能见度的观测值仍有一定偏差。对于高能见度的模拟误差大于低能见度,可能与能见度仪的质量有关;对于低能见度情形下,模拟值会存在小幅的波动。该方法的数据获取容易且建模流程简便,一定程度上反映了不同气象因子对能见度的非线性作用,但由于能见度变化机制复杂,在不同地形、不同地域和不同季节下气象要素权重可能不同,需要进一步尝试建立普适性的模型。
2)基于图像的能见度估计深度学习模型:利用尺度不变特征变换方法确定图像中反映能见度变化的关键点,实现了低信噪比的图像特征提取,简化了图像预处理流程,并将关键点的特征向量作为全连接神经网络模型的训练样本,减少模型计算量的同时也增强了可解释性。通过分层抽样方法解决训练样本的能见度分布不均衡问题,提高模型的泛化能力,在训练集和测试集上的R2分别为0.95和0.88。该方法的估计精度远高于基于气象要素的模型,表明视频图像在能见度估计中能够提供更多特征,并且深度学习模型优于传统的多项式拟合模型。需要强调的是,深度学习模型的训练过程也依赖于能见度的观测数据。
3)基于图像的能见度估计物理反演模型:高速公路具有丰富的视频监控数据,但在低能见度天气下的场景十分单一,根据暗通道先验理论和能见度测量基本方程,利用车道线间接获取图像的距离信息,结合大气光亮度和透射率计算大气消光系数,建立了适用于高速公路的单目图像的能见度反演模型。由于缺少高速公路的能见度实测数据,该方法的精度难以得到定量的验证。该方法无须摄像机的高度和方位等参数,并根据图像的光学特征和影响能见度的物理过程进行推导,具有明确的物理过程,反演结果捕捉了大雾逐步消散的变化趋势。该模型的不确定性主要来源于两个方面,一是监控拍摄的图像质量可能引起模型的能见度估计误差,二是间接获取的车道线距离与实际的偏差会导致能见度估计的系统性误差。
致谢:本文研究数据来自2020年“华为杯”第十七届中国研究生数学建模竞赛E题,感谢大赛组委会及命题专家提供了数据与帮助。
参考文献(References)
白爱娟,钟文婷,华兰,等,2014.成都市大气能见度变化特征及影响因子研究[J].中国环境监测,30(2):2125.BaiAJ,ZhongWT,HuaL,etal.,2014.AnalysisonthevariationofvisibilityinChengduanditsfactorsoflowvisibility[J].EnvironMonitChina,30(2):2125.doi:10.19316/j.issn.10026002.2014.02.004.(inChinese).
白永清,祁海霞,刘琳,等,2016.武汉大气能见度与PM2.5浓度及相对湿度关系的非线性分析及能见度预报[J].气象学报,74(2):189199.BaiYQ,QiHX,LiuL,etal.,2016.Studyonthenonlinearrelationshipamongthevisibility,PM2.5concentrationandrelativehumidityinWuhanandthevisibilityprediction[J].ActaMeteorolSin,74(2):189199.(inChinese).
鲍婧,黄亮,沈阳,等,2018.江苏不同强度降雨对能见度影响分析[J].大气科学学报,41(5):702709.BaoJ,HuangL,ShenY,etal.,2018.AnalysisoftheinfluenceofrainfallintensityonvisibilityinJiangsu[J].TransAtmosSci,41(5):702709.doi:10.13878/j.cnki.dqkxxb.20170806002.(inChinese).
ChaabaniH,KamounF,BargaouiH,etal.,2017.ANeuralnetworkapproachtovisibilityrangeestimationunderfoggyweatherconditions[J].ProcediaComputSci,113:466471.doi:10.1016/j.procs.2017.08.304.
陈静,赵春生,2014.大气低能见度的影响因子分析及计算方法综述[J].气象科技进展,4(4):4451.ChenJ,ZhaoCS,2014.Areviewofinlfuencefactorsandcalculationofatmosphericlowvisibility[J].AdvMeteorolSciTechnol,4(4):4451.doi:10.3969/j.issn.20951973.2014.04.007.(inChinese).
陈钟荣,张炎,张瑶,2019.基于自适应雾浓度系数的暗通道先验法能见度测量[J].现代电子技术,42(9):3945.ChenZR,ZhangY,ZhangY,2019.Visibilitymeasurementusingdarkchannelpriormethodbasedonadaptivefogconcentrationcoefficient[J].ModElectronTech,42(9):3945.doi:10.16652/j.issn.1004373x.2019.09.010.(inChinese).
段立春,刘超,钟玮,等,2017.一种利用大气散射模型实现图像去雾的方法[J].图像与信号处理,6(2):7888.DuanLC,LiuC,ZhongW,etal.,2017.Amethodofimagedehazingusingatmosphericscatteringmodel[J].JournalofImageandSignalProcessing,6(2):7888.doi:10.12677/jisp.2017.62010.(inChinese).
范新南,冶舒悦,史朋飞,等,2019.改进大气散射模型实现的图像去雾算法[J].计算机辅助设计与图形学学报,31(7):11481155.FanXN,YeSY,ShiPF,etal.,2019.Animagedehazingalgorithmbasedonimprovedatmosphericscatteringmodel[J].JComputAidedDesComputGraph,31(7):11481155.doi:10.3724/SP.J.1089.2019.17458.(inChinese).
傅刚,李晓岚,魏娜,2009.大气能见度研究[J].中国海洋大学学报(自然科学版),39(5):855862.FuG,LiXL,WeiN,2009.Reviewontheatmosphericvisibilityresearch[J].PeriodOceanUnivChina,39(5):855862.doi:10.16441/j.cnki.hdxb.2009.05.009.(inChinese).
國家质量技术监督局,2009.道路交通标志和标线:GB/T5768.12009[S].北京:中国标准出版社.TheStateBureauofQualityandTechnicalSupervision,2019.Roadtrafficsignsandmarkings:GB/T5768.12009[S].Beijing:StandardsPressofChina.(inChinese).
何佳宝,周军,江琪,等,2018.宁波市秋冬季大气能见度特征及影响因素分析[J].中国环境监测,34(2):3540.HeJB,ZhouJ,JiangQ,etal.,2018.Character8885isticsandinfluencefactorsofatmosphericvisibilityinautumnandwinterofNingbo[J].EnvironMonitChina,34(2):3540.doi:10.19316/j.issn.10026002.2018.02.05.(inChinese).
HeKM,SunJ,TangXO,2011.Singleimagehazeremovalusingdarkchannelprior[J].IEEETransPatternAnalMachIntell,33(12):23412353.doi:10.1109/TPAMI.2010.168.
侯灵,安俊琳,朱彬,2014.南京大气能见度变化规律及影响因子分析[J].大气科学学报,37(1):9198.HouL,AnJL,ZhuB,2014.CharacterizationofvisibilityvariationtrendanditsinfluencefactorsinNanjing[J].TransAtmosSci,37(1):9198.doi:10.13878/j.cnki.dqkxxb.2014.01.010.(inChinese).
胡平,杨旭东,2017.高速公路能见度快速检测算法[J].公路交通科技,34(4):115122.HuP,YangXD,2017.Analgorithmforfastdetectingexpresswayvisibility[J].JHighwTranspResDev,34(4):115122.doi:10.3969/j.issn.10020268.2017.04.017.(inChinese).
李伟,魏敏,郭忠立,2020.基于深度学习的机场大雾天气预警方法研究现状[J].计算机科学与应用,(7):13671372.LiW,WeiM,GuoZL,2020.Researchonairportwarningmethodsofheavyfogbasedondeeplearning[J].ComputSciAppl,(7):13671372.(inChinese).
LoweDG,1999.Objectrecognitionfromlocalscaleinvariantfeatures[J].ProcSeventhIEEEIntConfComputVis,2:11501157vol.2.doi:10.1109/ICCV.1999.790410.
LoweDG,2004.Distinctiveimagefeaturesfromscaleinvariantkeypoints[J].IntJComputVis,60(2):91110.doi:10.1023/b:visi.0000029664.99615.94.
MaoJ,PhommasakU,2014.Detectingfoggyimagesandestimatingthehazedegreefactor[J].JComputSciSystBiol,7(6):226228.doi:10.4172/jcsb.1000161.
孟蕾,周奇越,牛生杰,等,2010.降水对雾中能见度参数化的影响[J].大气科学学报,33(6):731737.MengL,ZhouQY,NiuSJ,etal.,2010.Effectofrainfallonparameterizationoffogvisibility[J].TransAtmosSci,33(6):731737.doi:10.13878/j.cnki.dqkxxb.2010.06.010.(inChinese).
孟颖,吴宏涛,贾磊,等,2019.基于监控视频的公路能见度检测方法[J].交通运输研究,5(1):6572.MengY,WuHT,JiaL,etal.,2019.Highwayvisibilitydetectionmethodbasedonsurveillancevideo[J].TranspRes,5(1):6572.doi:10.16503/j.cnki.20959931.2019.01.009.(inChinese).
NarasimhanSG,NayarSK,2002.Visionandtheatmosphere[J].IntJComputVis,48(3):233254.doi:10.1023/a:1016328200723.
聶凯,王京丽,雷鸣,等,2020.基于数字摄像能见度仪的北京地区降雨和雾霾天气能见度对比分析[J].气象与环境学报,36(1):2835.NieK,WangJL,LeiM,etal.,2020.ComparisonofvisibilityinrainfallandhazefogweatherinBeijingusingdigitalphotographicvisibilitysystem[J].JMeteorolEnviron,36(1):2835.doi:10.3969/j.issn.1673503X.2020.01.004.(inChinese).
欧斌娜,陈志翔,汤英文,等,2020.基于暗通道的单幅图像雾天低能见度检测算法[J].闽南师范大学学报(自然科学版),33(1):2430.OuBN,ChenZX,TangYW,etal.,2020.Lowvisibilitydetectionalgorithmbasedondarkchannelforsingleimageinfoggydays[J].JMinnanNormUnivNatSci,33(1):2430.doi:10.16007/j.cnki.issn20957122.2020.01.005.(inChinese).
潘洪密,吴兑,李菲,等,2015.广州地区大气能见度与颗粒物关系的初探[J].环境监控与预警,7(1):3236.PanHM,WuD,LiF,etal.,2015.TherelationshipbetweenatmosphericvisibilityandparticulatematterinGuangzhou[J].EnvironMonitForewarning,7(1):3236.doi:10.3969/j.issn.16746732.2015.01.009.(inChinese).
石玉立,王彬,卜帆,2018.基于图像特征的大气能见度估算方法[J].南京理工大学学报(自然科学版),42(5):552559.ShiYL,WangB,BuF,2018.Atmosphericvisibilitymeasurementbasedonimagefeature[J].JNanjingUnivSciTechnol,42(5):552559.doi:10.14177/j.cnki.321397n.2018.42.05.007.(inChinese).
宋洪军,郜园园,陈阳舟,2015.基于摄像机动态标定的交通能见度估计[J].计算机学报,38(6):11721187.SongHJ,GaoYY,ChenYZ,2015.Trafficvisibilityestimationbasedondynamiccameracalibration[J].ChinJComput,38(6):11721187.doi:10.11897/SP.J.1016.2015.01172.(inChinese).
沈家芬,冯建军,谢利,等,2007.广州市大气能见度的特征及其影响因子分析[J].生态环境,16(4):11991204.ShenJF,FengJJ,XieL,etal.,2007.CharacterizationofvisibilityanditseffectfactorsinGuangzhou[J].EcolEnviron,16(4):11991204.doi:10.16258/j.cnki.16745906.2007.04.025.(inChinese).
TibshiraniR,1996.Regressionshrinkageandselectionviathelasso[J].JRoyalStatSocSerBMethodol,58(1):267288.doi:10.1111/j.25176161.1996.tb02080.x.
王京丽,刘旭林,2006.北京市大气细粒子质量浓度与能见度定量关系初探[J].气象学报,64(2):221228.WangJL,LiuXL,2006.ThediscussonrelationshipbetweenvisibilityandmassconcentrationofPM2.5inBeijing[J].ActaMeteorolSin,64(2):221228.doi:10.3321/j.issn:05776619.2006.02.010.(inChinese).
王晓丽,张苏平,张晓梅,等,2008.青岛市水平能见度变化特征及气象影响因子分析[J].气象科学,28(S1):3136.WangXL,ZhangSP,ZhangXM,etal.,2008.VariationcharacteristicsandmeteorologicalinfluencefactorsofvisibilityinQingdao[J].SciMeteorSin,28(S1):3136.(inChinese).
WMO,1996.Guidetometeorologicalinstrumentsandmethodsofobservation[M].6thed.Geneva:WMOPublish:186187.
吴兑,毕雪岩,邓雪娇,等,2006.珠江三角洲大气灰霾导致能见度下降问题研究[J].气象学报,64(4):510517,538.WuD,BiXY,DengXJ,etal.,2006.Effectofatmospherichazeonthedeteriorationofvisibilityoverthepearriverdelta[J].ActaMeteorolSin,64(4):510517,538.doi:10.3321/j.issn:05776619.2006.04.011.(inChinese).
徐敏,張红英,吴亚东,2017.基于场景深度的雾天图像能见度检测算法[J].自动化仪表,38(9):8994.XuM,ZhangHY,WuYD,2017.Imagevisibilitydetectionalgorithmbasedonscenedepthforfoggingenvironment[J].ProcessAutomInstrum,38(9):8994.doi:10.16086/j.cnki.issn10000380.201709021.(inChinese).
许茜,殷绪成,李岩,等,2013.基于图像理解的能见度测量方法[J].模式识别与人工智能,26(6):543551.XuX,YinXC,LiY,etal.,2013.Visibilitymeasurementwithimageunderstanding[J].PatternRecognitArtifIntell,26(6):543551.doi:10.16451/j.cnki.issn10036059.2013.06.003.(inChinese).
姚镇海,周建平,邱新法,2019.基于高速公路视频图像的能见度计算[J].南京信息工程大学学报(自然科学版),11(1):8590.YaoZH,ZhouJP,QiuXF,2019.Visibilitycalculationalgorithmbasedonhighwayvideoimage[J].JNanjingUnivInfSciTechnolNatSciEd,11(1):8590.doi:10.13878/j.cnki.jnuist.2019.01.015.(inChinese).
张驰,贺亚龙,黄星,等,2018.雾天不同能见度条件下高速公路限速建议值研究[J].交通信息与安全,36(5):2533.ZhangC,HeYL,HuangX,etal.,2018.Astudyonspeedlimitofdifferentvisibilityonexpresswaysunderfoggyweather[J].JTranspInfSaf,36(5):2533.doi:10.3963/j.issn.16744861.2018.05.004.(inChinese).
张利娜,张朝林,王必正,等,2008.北京机场高速公路能见度与大气动力和热力因子的诊断及物理分析[J].气候与环境研究,13(3):260272.ZhangLN,ZhangCL,WangBZ,etal.,2008.ThediagnoseandphysicalanalysesabouttherelationshipbetweenatmosphericvisibilityandthecorrespondingdynamicalandthermodynamicalfactorsintheBeijingAirportexpressway[J].ClimEnvironRes,13(3):260272.(inChinese).
张剑,刘红年,唐丽娟,等,2011.苏州城区能见度与颗粒物浓度和气象要素的相关分析[J].环境科学研究,24(9):982987.ZhangJ,LiuHN,TangLJ,etal.,2011.CorrelationanalysisbetweenatmosphericvisibilityandparticulatemassconcentrationaswellasmeteorologicalfactorsoverSuzhouurbanarea[J].ResEnvironSci,24(9):982987.doi:10.13198/j.res.2011.09.18.zhangj.009.(inChinese).
张文煜,袁九毅,2007.大气探测原理与方法[M].北京:气象出版社.ZhangWY,YuanJY,2007.Principlesandmethodsofatmosphericdetection[M].Beijing:ChinaMeteorologicalPress.(inChinese).
赵瑞,胡辽林,赵江涛,2016.基于暗原色先验理论的大气能见度测量[J].激光与光电子学进展,53(6):060103.ZhaoR,HuLL,ZhaoJT,2016.Atmosphericvisibilitymeasurementbasedondarkchannelprior[J].LaserOptoelectronProg,53(6):060103.doi:10.3788/LOP53.060103.(inChinese).
周凯,2017.基于道路监控视频的雾霾能见度检测方法研究[D].南京:南京邮电大学.ZhouK,2017.Researchonmethodsforhazevisibilitydetectionbasedonroadsurveillancevideos[D].Nanjing:NanjingUniversityofPostsandTelecommunications.(inChinese).
周凯,成孝刚,谈苗苗,等,2016.基于暗通道先验与图像熵的能见度检测[J].南京邮电大学学报(自然科学版),36(6):9095.ZhouK,ChengXG,TanMM,etal.,2016.Visibilityestimationbasedondarkchannelpriorandimageentropy[J].JNanjingUnivPostsTelecommunNatSciEd,36(6):9095.doi:10.14132/j.cnki.16735439.2016.06.014.(inChinese).
Analysisoftheapplicationoftrafficvisibilityestimationmodelsindifferentscenarios
LIUQiyang1,2,3,QIAOFengxue1,2,3,CHENBo4,SONGZhichao1,2,3,JIRenjie1,2,3,WEIChaoshi4
1KeyLaboratoryofGeographicInformationScience,MinistryofEducation,EastChinaNormalUniversity,Shanghai200241,China;
2SchoolofGeographicSciences,EastChinaNormalUniversity,Shanghai200241,China;
3InstituteofEcoChongming(IEC),EastChinaNormalUniversity,Shanghai202162,China;
4TheEastChinaRegionalAirTrafficManagementBureauundertheCivilAviationAdministrationofChina(CAAC),Shanghai200335,China
Visibilityisanimportantphysicalquantitythatreflectsthedegreeofatmospherictransparency,andiscloselyrelatedtopeoplesdailylifeandtraffictravel.Inthisstudy,inordertomaketheestimationofvisibilitymoreflexibleandefficient,threevisibilityestimationmodelsareconstructedandimprovedfordifferentscenarios,andtherespectiveapplicability,advantagesanddisadvantagesofthedifferentmodelsareanalyzed.First,thevisibilityestimationisperformedbasedonmeteorologicalstationobservations,usingcorrelationcoefficientmatrixandfeatureimportanceanalysistofilteroutthethreevariablesofrelativehumidity,temperatureandhorizontalwindspeed,andbothdayandnightareconsideredtobuildaternarycubicpolynomialfittingmodel,whichimprovestheoverallfittingability.Second,thedeeplearningmodelofvisibilityperformsestimationbasedonimages,andthescaleinvariantfeaturechangemethodisusedtoextractthefeaturevectorofkeypointsofimages,asthetrainingoffullyconnectedneuralnetworkmodel.Next,asthetrainingdataofthefullyconnectedneuralnetworkmodel,thecomputationalcostisreducedandthestabilityofthemodelisimproved.Third,theinversemodelofvisibilityestimationbasedonheighthighwayimages,accordingtothedarkchannelaprioritheoryandbasicequationofvisibilitymeasurement,theatmosphericluminosityandtransmittancearecalculated,andthevisibilityofthemonocularimagesisobtainedbasedontheimagedistanceinformation.Themethoddoesnotrequirepresettargetandcameraparameters,nordoesitrequiretrainingsamples.Thethreevisibilityestimationmodelscanbeadaptedtodifferentscenarios,andcanreducethedependenceonobservationequipment.
visibilityestimation;scaleinvariantfeaturetransform;fullyconnectedneuralnetworks;extinctioncoefficient;darkchannelprior
doi:10.13878/j.cnki.dqkxxb.20210731001
(责任编辑:袁东敏)
20210731收稿,20220301接受
上海市自然科學基金资助项目(21ZR1420400);国家自然科学基金资助项目(41730646)