电动汽车负载模拟加载电机控制系统的设计
2022-05-11 08:57孙柯楠李若楠寇恒庆李彦林
科学技术创新 2022年13期
孙柯楠 李若楠 寇恒庆 韩 帅 李彦林
(泰州学院,江苏 泰州 225300)
在电动化、智能化、共享化、网联化的趋势下,以及对环保要求越来越严格,电动化是汽车未来的发展方向。近两年,随着技术进步和燃油车禁售等相关政策的推进,纯电动汽车成为各大车企的研发重点[1]。由于其对环境的影响小于传统汽车,其前景普遍看好。因此,用于电机驱动系统实验测试的负载模拟器也成为研究热点。通过电力负载仿真模拟实际负载的动静态特性,替代以往整车物理测试的做法,可以节省成本和资源,达到测试目的,解决实际问题。所以如何更好设计负载模拟系统,更方便的解决电动汽车试验时所遇到的问题也成了国内研究的一大热点[2-4]。
1 负载模拟系统原理
负载模拟系统又称转矩伺服加载系统,是利用电机作为电能与机械能之间的自建能量交换装置,以转矩的形式加载轴承设备,进而模拟实际的轴承对象。该系统主要分为五个部分:速度控制模块、牵引电机模块、机械轴连接装置模块、负载电机模块和负载转矩加载模块。机械轴连接模块连接两个实验电机,负责协调速度和扭矩之间的关系。
上位机与嵌入式工业计算机通过网线通信,电动汽车驱动电机与负载模拟电机通过联接轴连接,实现两者的转速一致。联接轴上附带转速、转矩传感器,实时采集转速和扭矩信息传递给上位机,上位机通过反馈的电压和电流信号,控制负载模拟电机驱动器,对加载电机进行控制,模拟汽车在运行时的情形。其结构如图1 所示。
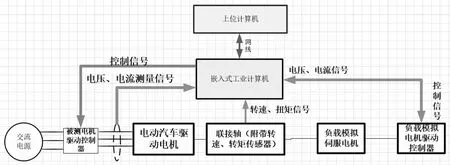
图1 负载模拟系统与车用电机驱动轴连接示意图
汽车在行驶时会受到各种各样的阻力,路况的不同,风阻的差异,轮胎的摩檫力等都会是汽车的运动状态改变。所以分析汽车行驶时的运动模型就显得很有必要,图2 为汽车行驶时的受力示意图。
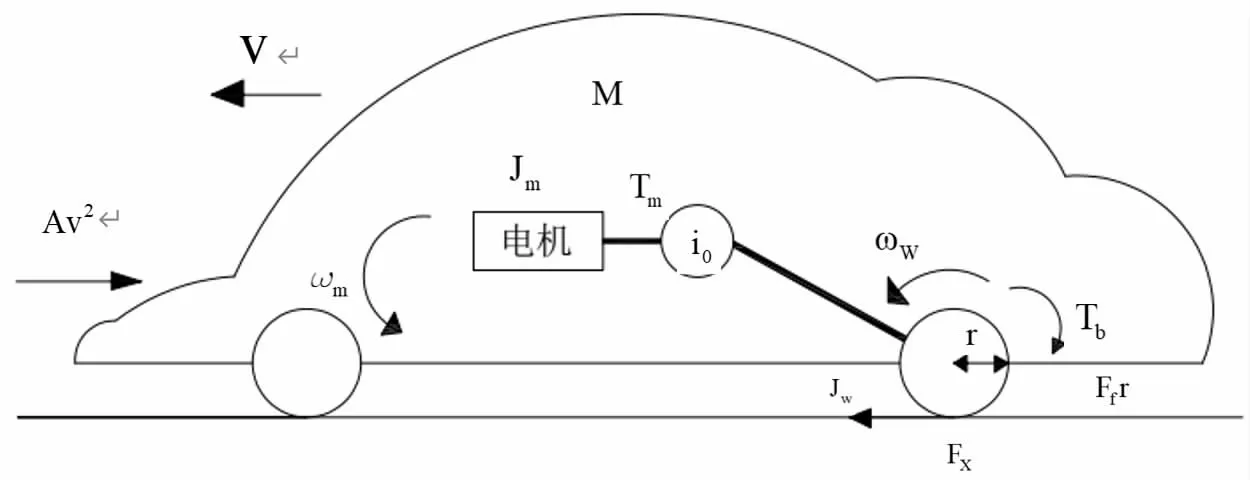
图2 车辆受力示意图
其中,阻尼载荷在实际仿真中容易实现,加速度阻力体现为惯性载荷,其计算与速度微分项有关。在实际电气仿真中,速度的测量会导致惯性负载项的扰动较大,因此可以采用负载模拟加载系统来解决上述问题。
2 系统设计
电动汽车负载模拟系统的实质在于对加载电机的控制,本质上就是通过电流和转速环的联合控制,电流环是一个矢量控制,我们采用pi 调节器控制,达到控制电机的目的。该系统主要包括以下模块:永磁同步电动机部分、速度控制部分、电流控制部分、坐标变换部分、SVPWM部分和逆变器部分。整个控制过程如下:首先将给定转速信号与转速位置检测到的转速信号进行比较,在转速环的调节作用下,将输出的交轴电流分量作为电流调节器的给定信号,然后使用其与反馈信号之差作为电流控制回路的输入。α、β 坐标系中的电压通过park变换得到,逆变器的作用是产生把直流变换成三相频率相同幅值大小可变的交流电。逆变器由SVPWM信号驱动,控制逆变器IGBT 管的通断,从而实现对电机的控制。随着高性能处理器的普及,上述这些步骤都可以在DSP 开发板内部实现,为实验提供了便利。这里主要介绍电流环和转速环的设计。
2.1 电流环的设计
在伺服系统中,主观目的是达到对转矩的精确控制,使控制系统有一定的快速响应性能,因此反馈环节就显得极为重要。电流调节器一般采用比列积分(PI)控制。其电流控制部分如图3 所示。
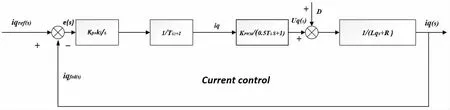
图3 电流控制部分框架图
PWM 逆变器和电机的电枢回路是电流控制部分的控制对象。KPWM表示逆变器的放大倍数,在控制系统中,PWM 环节也可以被认为是惯性环节,只不过惯性较小。设其为10KHZ 时,我们可以将延时环节和PWM环节组合成一个惯性环节,其结构将得到极大简化。记延时时间常数为td=TS,而逆变器的放大倍数KPWM取值也很重要,为简化分析这里将其设为1 来处理。于是电流环简化得到:


图4 简化后的电流环框架
2.2 转速环的设计
速度环的主要作用是为了抑制负载扰动,转速环作为矢量控制的外环一样决定系统的稳定性。转速外环传递函数框架图如图5 所示。
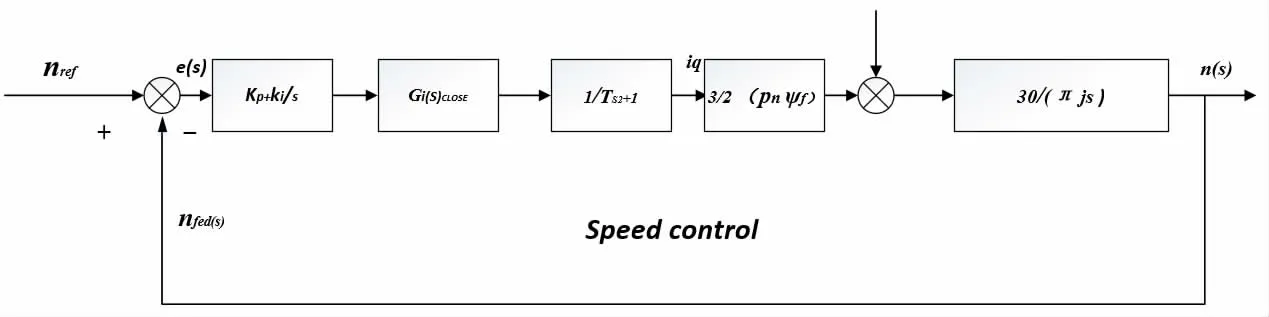
图5 转速环框架图
电流环都可以用等效成一阶惯性环节来代替,由于外部速度环有延时环节,可以结合延时小惯性环节。由于外部速度环的采样时间Ts2远大于电流环的采样时间Ts,简化整定后的电流环与延时环节进行合并处理得:
ASR 动态结构图进一步简化整定见图6。
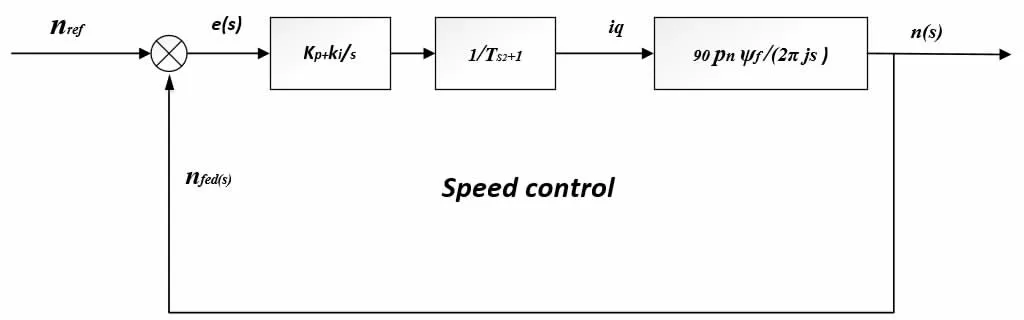
图6 简化后的转速环框架图
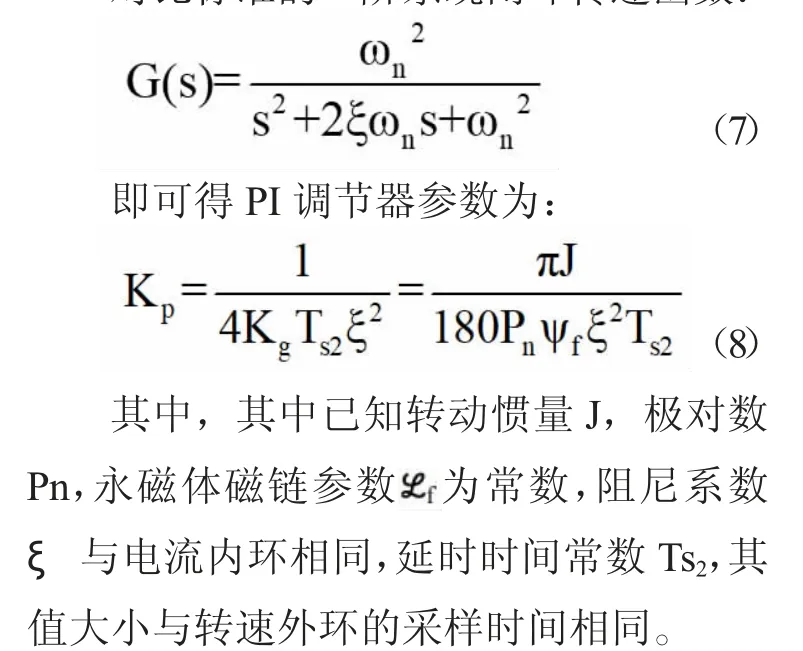
将转速环按二阶典型环节整定,当Ki 的值比较小,可得其传递函数:

对比标准的二阶系统闭环传递函数:
3 实验结果分析
针对上一章设计的加载电机控制系统于MATLAB 中搭建相关模块,在此基础上,通过实物与上位机的有机结合搭建半实物实验平台。从MATLAB/Simulink 生成针对特定处理器芯片产品级嵌入式代码,完成目标代码的生成,再快速地植入目标软件系统。对加载电机进行实时控制,来达到模拟电动汽车行驶时情形的目的。
通过实验得到输出的SVPWM波形如图7 所示。
由图7 可以看出得到电压波形呈正弦波状。简单来说,占空比越大,电压越高;占空比越小,电压越低。让占空比呈正弦变化,电压值自然也是呈正弦变化了。
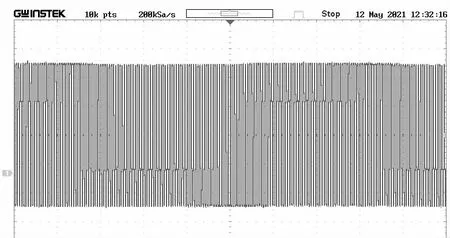
图7 输出SVPWM 波形
U-V 两相之间的线电压如图8 所示。
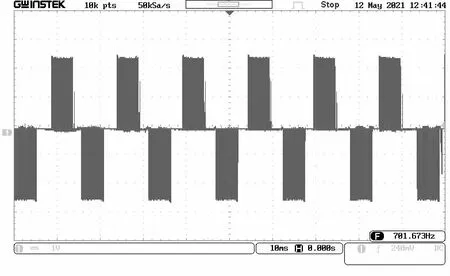
图8 U-V 两相之间的线电压
U-W 两相之间的线电压如图9 所示。
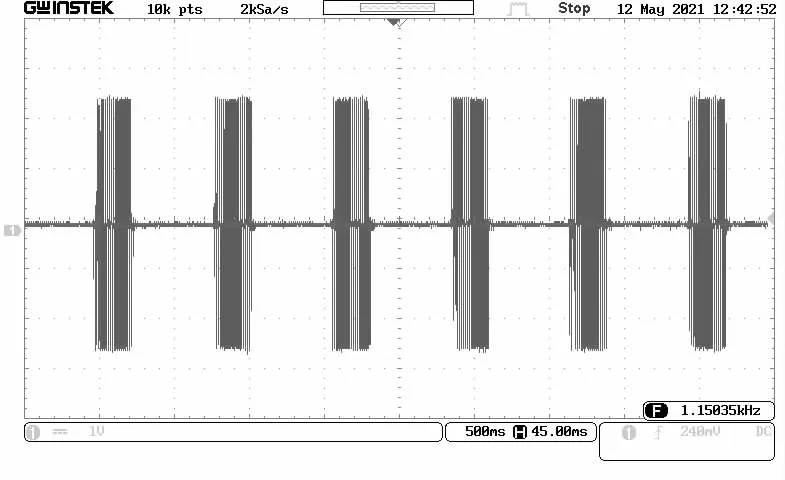
图9 U-W 两相之间的线电压
从实验结果可以看出,电机空载运行时,通过调节给定电压的大小,控制给定转速的高低,实际转速接近给定的转速信号,转速调节平滑。输出SVPWM波形呈正弦状,U V W 三相中两相之间的线电压稳定,产生三相正弦变频电压能够稳定驱动逆变器工作,控制电机运转,电机平稳运行。证明该模拟系统设计可靠,跟随性能良好。
4 结论
本文从研究电动汽车负载模拟的角度出发,提出一种有实物参与的半实物实验平台。通过控制加载电机来模拟汽车行驶的实时负载。由上述实验结果可以看出,模拟负载系统可实现对转速的平滑调节,负载电机实时输出转矩响应迅速,具有良好的动态响应性能;且给电机施加变化负载时,系统能够很快的纠正偏差使转速在很短时间内恢复正常,电机稳定运转。说明该负载模拟系统具备很好的抗负载扰动性能。通过不同的负载模拟了汽车在行驶过程中遇到的不同情况。具有较强的可移植性,为以后电动汽车电机的选型和设计提供了一种更简洁有效的方法。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
防爆电机(2021年5期)2021-11-04
科技信息·学术版(2021年7期)2021-01-10
煤矿机电(2020年5期)2020-11-02
课程教育研究·学法教法研究(2018年20期)2018-08-11
电机与控制学报(2018年9期)2018-05-14
电子制作(2018年1期)2018-04-04
电子制作(2017年23期)2017-02-02