基于滑动窗滤波与卡尔曼滤波的信息融合
2022-05-11 08:57黄金虎
科学技术创新 2022年13期
黄金虎 乔 祁
(1、中国直升机设计研究所,江西 景德镇 333001 2、中航技进出口有限责任公司,北京 102600)
1 总体设计思路
本文以无人直升机活塞发动机的转速信息融合为研究对象,具体实施过程如图1 所示。首先分析发动机的开车数据,建立对应的离散化数据模型;其次是确定初始参数、融合过程;最后分析对比融合数据与原始数据。

图1 设计流程图
活塞发动机的转速信号主要包含三路传感器采集,分别是频率采集单元(脉冲信号)、发动机采集单元TCU(数字信号)、旋翼转速信号(脉冲信号)。本文最终目的是在飞控计算机内具备实时融合三路传感器为一路,同时如果有一路信号出现故障时,能自动剔除该信号。
三路传感器的之间相互独立,额定转速5500rpm,旋翼转速乘传动比9.524,完整开车转速信号数据如图2 所示,离合器啮合后,旋翼转速与发动机转速重叠。在时间t=515~1672s 区间,发动机转速处于额定闭环控制状态。在时间t=1672~1900s 区间,发动机转速处于停车过程。
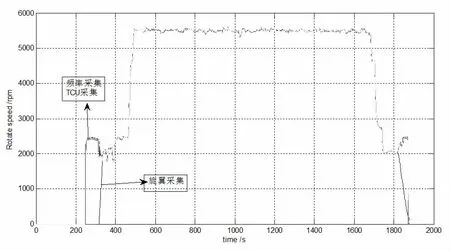
图2 各路信号数据
2 建立数学模型
发动机转速特性离散化的模型及观测模型如下:

式中:x 为发动机的转速函数,k 为时间计数,f 为状态转移矩阵,B 为控制输入矩阵,μ 为外部输入包括油门开度、扭矩、活塞缸空气输入、环境温度等,q 为发动机本身系统偏差造成的高斯噪声,包含缸体振动、气动负载变化、油品、其他环境因素等。z 为各传感器的观测值包括发动机转速传感器(脉冲信号)、TCU 采集、旋翼传感器(脉冲信号),h 为转速到传感器映射矩阵,v 为各传感器采样时的高斯噪声。
3 窗空间
窗函数在信号处理中是指一种除在给定区间之外取值均为0 的实函数。本文借鉴此类方法,对有限时间范围的波形进行分析。本文的运算周期tick=40ms,建立一个按照先进先出原则的样本分析窗空间speed。其中speed 为13×3 矩阵,每列分别对应于频率采集单元(脉冲信号)、发动机采集单元(数字信号)、旋翼转速信号(脉冲信号)数值。
4 滤波参数的初始化
发动机的输入矩阵为μ,设μ1 为油门值、μ2 为扭矩负载值、μ3 活塞缸空气输入、μ4 环境温度等,则外部输入向量为μ=[μ1,μ2, μ3,μ4]T,发动机转速函数为x(μ1,μ2, μ3,μ4),则控制阵B 为:

分析完整的开车时间历程数据,发动机在额定状态下,转速近似一条水平直线,即宏观上发动机转速对任意输入的偏导数为0,则控制矩阵为0。实际上,采用了PID 闭环控制的活塞发动是一套稳定的总距随动控制系统。在额定工况下,发动的转速,在任意负载下,转速的波动范围为(-50,50)。引起此类偏差是由发动机气缸特性、气动负载、油品、环境造成的,属于高斯噪声;如果想提高模型的预测准确性,实际使用中可通过黑盒法辨识出发动机转速模型,本文不做扩展。实际上对于机械惯性系统,在很短的时间的微小输入都可以看作是噪声干扰。因此公式(1)可以简化为:

式中:带下标x_(k)为转速在本次tick 的先验估计值,x(k-1)为上次tick 的转速后验估计值(最优估计),f 为状态方程。
4.1 状态方程f:在一个tick=40ms 下,默认状态下,上一tick 的采样与本次tick 的采样相同,转速不变,f=1。
4.2 过程噪声q:分析历程数据,得到模型高斯噪声q=1.5。
4.3 估计值协方差p:初始化p=1,需要迭代过程实时跟新。
4.4 先验估计协方差p_:初始化p_=1,需要迭代过程实时跟新。
4.5 窗空间列方差v:初始化v=[0 0 0],用于存储speed 每列的方差,不断更新观测方程的方差矩阵。
有时候我们在材料上找不到明确的主题或标题,而问题设问上也没有具体对象的限制。那么我们可能遇到了“全开”式论题,我们只能根据材料信息,将零碎的信息源整合成一个对象,以此为基础进行“要义”式、“推因”式或“推果”式立论。若是零碎的材料信息可以整合成两个对象,可以考虑在二者之间建立联系,使之成为简约句子结构的主语或宾语。下面请看例3:
4.6 测量噪声协方差r:初始化r=[1 0 0;0 1 0;0 0 1]; 3×3 矩阵,用于求取测量残差,需要使用v 对对角线赋值,由于各传感器相互独立,因此其他元素赋值0。
4.7 观测矩阵z:初始化z=[0;0;0]; 1×3 的列向量,z1、z2、z3 分别对应频率采集单元(脉冲信号)、TCU(数字信号)、旋翼转速信号(脉冲信号)最新数值。
4.8 观测到状态矩阵h:由公式2 得,h=[1;1;1],是1维列向量,用于映射传感器测试量与预测值,统一它们的量纲。
4.9 转速最优估计x:初始化x=0。
4.10 滤波增益矩阵K:初始化K=[0 0 0],需要迭代过程实时跟新。
5 迭代运算
融合的迭代运算主要以卡尔曼滤波[2]的为基础进行,但系统噪声及观察噪声做了相应调整。
5.1 卡尔曼第一公式

式中:状态转移公式x_是本次的先验估计,f 是状态转移矩阵,x 是上次的最优估计。
5.2 卡尔曼第二公式

式中:噪声协方差矩阵的传递公式,预测模型带来的噪声q,表示不确定性在各公式的传递。
5.3 人工干预通道
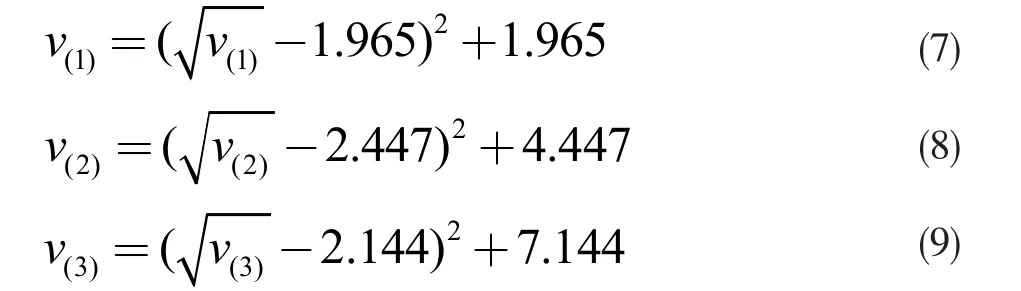
为了避免矩阵计算机运算过程中出现非法数,需要对窗空间的各列向量均方根值v 做出限定。设定上边界v(1)Max=25000,v(2)Max=25000,v(3)Max=25000。
设定下边界,使用抛物线函数,对称轴由实际开车均方根值数据得到。极小值可人工设置,本文称之为“人工干预通道”,通过调整各传感器极小值来主动选择置信度,极值越小置信度越高。
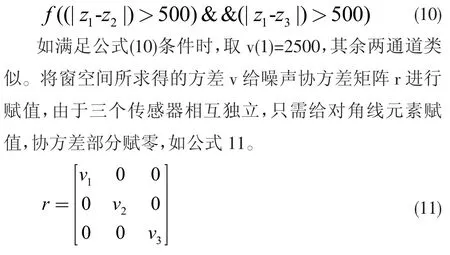
5.4 余度管理与控制
当某路传感器出现背离其它传感器信号时,采用三判二的原则,方差v 赋极大值,能使其融合权重占比降至最低。
5.5 测量残差协方差
5.6 卡尔曼第三公式

卡尔曼系数的更新,其中K 为1×3 的列向量,每个元素对应的数学意义分别表示频率采集、TCU 采集单元、旋翼转速采集在转速融合中所占之权重。预估值在转速信息融合中所占权重则为1-K×h。
5.7 卡尔曼第四公式
后验估计(最优估计)=模型数据后验估计+k×(观测残差)。

5.8 卡尔曼第五公式
预估模型的噪声协方差矩阵的更新。

5.9 窗空间的更新
程序等待一tick 后,更新speed 的13×3 的矩阵,以最新的转速采样z1k+1、z2k+1、z3k+1替换上一tick 的值,队列其他元素依次向前,z1k-12、z2k-12、z3k-12丢弃,按照“先进先出”的原则往前替换,如公式16、17 所示。
求取k+1 时刻speed 的每列均方根值,更新窗空间方差v,用于不断校准观测方程的方差矩阵。程序跳转至卡尔曼第一公式。
6 融合效果与分析
飞控计算机分别记录下k 矩阵,转速融合最优估计x,画图分析如下。
6.1 额定阶段的转速与权重
选取时间段(1015~1050s)波动最大部分分析,如图3所示。
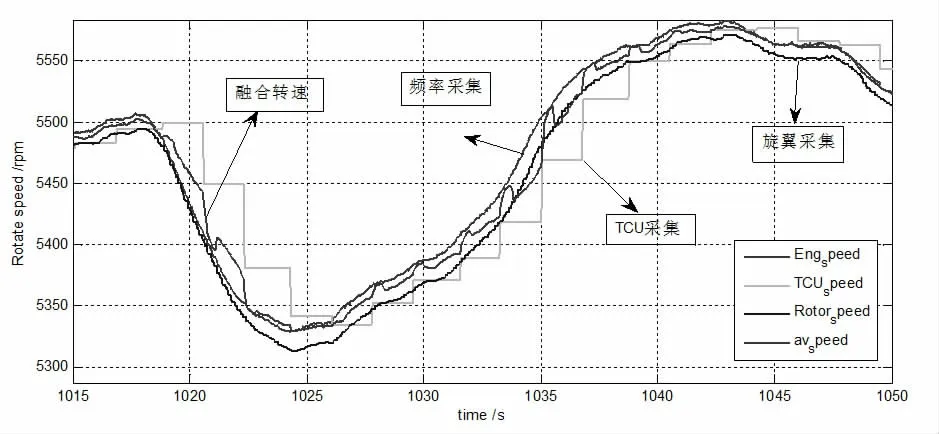
图3 额定阶段采样值与融合值
k1、k2 、k3、k4 分别表示频率采集、发动机采集单元、旋翼转速采集、预估值在转速信息融合中所占权重。其中k1+k2+k3+k4=1。在发动机额定状态,频率采集的权重约50%,TCU 采集的权重约12%,旋翼采集约18%,预估值的权重约20%。这些值的置信度可以通过调节人工干预通道进行调节。当某一信号波动较大时,与之对应的占比将相应的自动降低如图4 所示。
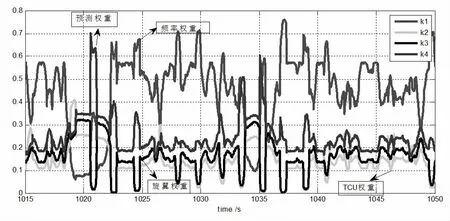
图4 额定阶段权重对比
6.2 停车阶段的转速与权重
选择时间t=1672~1900s 区间,分析发动机停车的过程数据如图5 所示,离合器率先进行脱开的过程,旋翼转速下降,最后发动机停车。
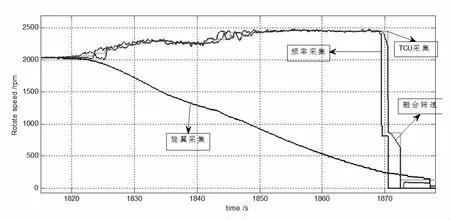
图5 停车阶段采样值与融合值
发动机的停车过程,能模拟当旋翼传感器失效时,融合算法经过若干步长后,能有效剔除失效信号。信息失真度低。如图6 所示,旋翼转速在最终融合过程中权重被调节到0%。
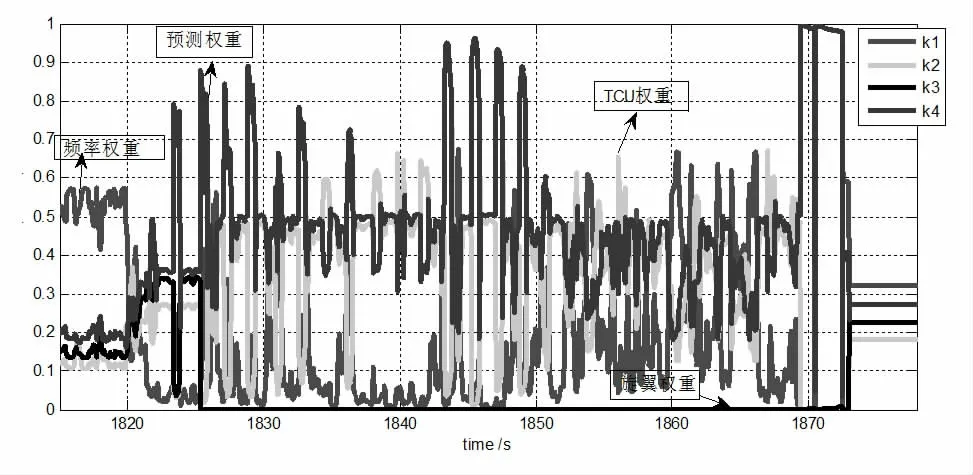
图6 停车阶段权重对比
7 结论
本文基于卡尔曼滤波的预测与跟新的回归校准思想,引入了谱分析中窗函数概念,改进了常规的“三判二”式的信号选择方式,设计了一套既能满足时域离散系统、过滤信号中高斯噪声的,又能诊断并屏蔽失效信号的、具备人工干预、余度控制融合的方法。
猜你喜欢
心理学报(2022年5期)2022-05-16
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
当代陕西(2020年17期)2020-10-28
电子制作(2019年9期)2019-05-30
计算机应用与软件(2019年2期)2019-04-01
人大建设(2018年5期)2018-08-16
经济研究导刊(2018年19期)2018-07-24
证券市场红周刊(2018年3期)2018-05-14
雷达学报(2017年3期)2018-01-19