基于DSP 的锅炉汽包水位控制系统研究
2022-05-11 15:38员三妮
山西化工 2022年2期
员三妮
(北京石油化工工程有限公司西安分公司,陕西 西安 710075)
在化工生产运行过程中,其中锅炉是非常重要的动力设备,主要任务是在生产过程中根据生产负荷的需要提供一定量规格的蒸汽,不仅是重要的热源更是动力源。一般常见的锅炉水位控制系统,如图1 所示。在火电厂运行过程中,在确保锅炉安全生产时首要任务就是控制其水位高度在额定值之间使过热蒸汽的温度保持稳定,将锅炉中炉膛负压值维持恒定值,并保证锅炉燃烧的经济性、高效性和有效性等。其水位的高度值与对燃烧的控制、蒸汽温度的控制以及蒸汽压力的控制密切相连。如果在运行的过程中汽包水位值降到警告值以下,水的气化速度将会非常快速,气泡内水量变化会比正常情况变化快,如果水位过高将会导致管壁结垢而遭到破坏,因而锅炉控制系统中的重中之重就是对汽包水位的控制。
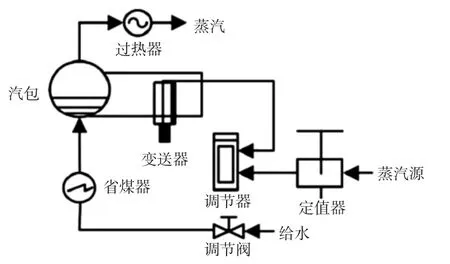
图1 锅炉水位系统控制结构图
1 锅炉气泡水位的控制方案
锅炉的运行过程中根据其容量、调节精度及负荷变化速度的相关要求,目前锅炉汽包水位控制系统通常有单冲量控制系统、位式控制系统、双冲量控制系统、三冲量控制系统等。
1)单冲量锅炉汽包水位控制系统具有设计成本低、系统结构简单、参数整定便捷等优点。但在实际的生产过程中会有“虚假水位”的存在,在生产中如果突然增加用气量时,实际的水位值是下降的,而这种单冲量控制系统的反馈却是上升的,当系统接收到这种错误信号后会减少水的流入量及减少阀门的开度。等“虚假水位”现象消散之后,会导致其水位发生骤降而引起安全事故。这种控制系统不适用于蒸汽流量变化较大的大中型锅炉。
2)双冲量水位控制系统目前采用的是“前馈-反馈”的复合结构,在长期生产实践探索中得出:直接利用蒸汽流量的变化作为输入量,不经过闭环通道,直接作用于水阀门,从而进行相关补偿,这样就会有效的解决了单冲量汽包水位控制系统中难以解决的问题,高效抑制了“虚假水位”对系统的影响。
3)三冲量水位控制系统是根据“汽包水位、蒸汽流量、给水流量”的变化控制汽包的水位,并通过给水调节阀来实现水位变化达到稳定的目的。
在锅炉启动过程中就对过热器、汽包、省煤器、水冷壁、再热器等相关设备进行保护。
对汽包的保护:严格控制上水温度及上水速度;严格控制汽包上、下壁温度差及内、外壁温差低于规定值;严格控制升温及升压速度。
三冲量水位控制系统,如图2 所示,目前这种控制系统采用的是“串级-前馈”复合结构。在控制系统中将给水流量、汽包水位作为系统的主调节部分,副调节相关参数则在前馈通道中进行补偿,在副回路中完成稳定调整。这种复合结构有效的满足了系统对“稳准快”的要求,抑制了“虚假水位”。具有系统稳定,抗干扰性强等特点,普遍适用于大中型锅炉。

图2 三冲量控制框图
2 控制系统硬件
本次设计控制系统硬件部分采用DSP2407A 作为控制核心,在整个系统中需要采集相应的输入信号:包括汽包水位值、给水流量、饱和蒸汽流量、饱和蒸汽压力、汽包压力。将这些信号输入到控制器采集后进行输出,电动执行器的位置信号作为输出控制的控制参量。
通过对锅炉汽包水位控制对象的性能分析后,本文提出了基于DSP 为控制核心的模糊自适应PID控制方案,在硬件系统中包含2407 控制器、SCI 接口、CAN 总线、显示模块、D/A 转换模块、JTAG 接口模块、电源模块、扩展存储器RAM 模块等,如图3所示。
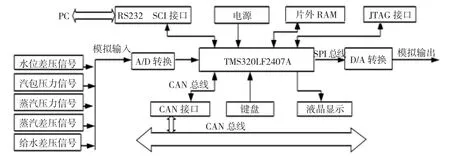
图3 模糊自适应PID 控制器硬件图
首先系统采集5 个模拟输入信号,包括:水位差压信号、汽包压力信号、蒸汽压力信号、蒸汽差压信号以及给水差压信号。采集信号之后通过A/D 转换器转换成为数字量,还需要数字滤波、压力补偿和标度变换等环节。再输入给控制器,执行相关的自适应模糊控制算法,DSP 经过运算后将电动执行器的位置信号输出,通过D/A 转换器称为模拟信号,传送给变频器或着伺服放大器,从而控制水阀门的开度值,保持汽包水位在一定的稳定范围内,使整个系统维持在平衡状态。
3 控制策略及系统仿真
在自动控制系统中传统的PID 算法作为最经典的控制算法已经有几十年的历史了,尤其在工控领域应用最多,控制算法依旧是普及最广的控制策略,其算法简单可靠、鲁棒性好、易学易懂、适用性强,稳态无静差。在工控系统控制中我们主要通过改变三个参数KP、KI、KD 来进行对系统的调整,根据给定值和实际的输出值构成控制偏差,将偏差按照比例、积分、微分通过线性组合构成控制量,对被控对象进行控制,从而可使系统达到稳定。
但是对于复杂的系统而言,由于有多个因素的影响,并且输入量较多,只用PID 进行控制时就无法满足控制要求。例如锅炉正常运行时发现当蒸汽流量和给水流量扰动不存在时,传统的控制策略将无法满足控制要求,非常容易存在静态误差,调整参数时很难达到精度要求。传统的PID 控制无法满足这种随机信号的大噪声干扰,因为这种控制方法不具备自整定、自适应性等特点。而模糊控制策略则具有相应特性,改善系统性能,因此采用模糊控制PID 控制策略,如图4 所示。
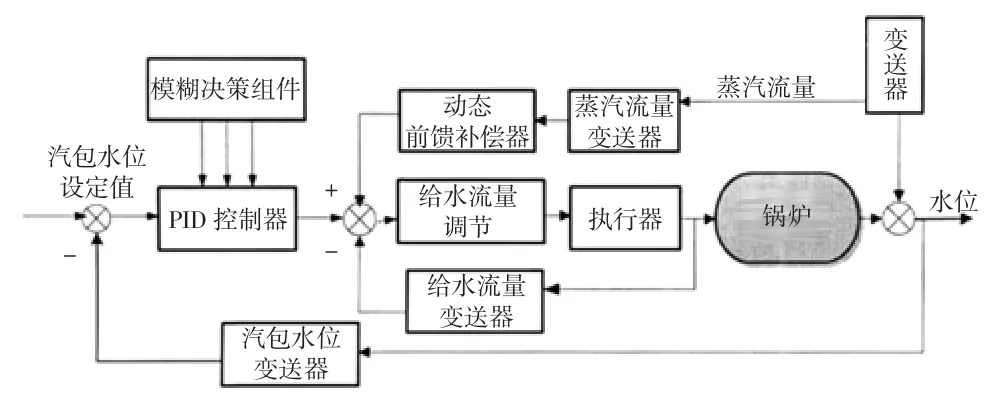
图4 模糊自适应控制系统图
当检测系统采用模糊控制算法时,在检测过程中添加3 个测量信号,有给水流量、蒸汽流量和汽包水位值,利用模糊控制算法计算出控制参数,应用于三冲量系统控制中。在系统中形成两路闭环回路,一条是给水流量检测装置,在给水流量变送器输出的信号中加入动态前馈补偿器,比较后输出给水调节阀,用来消除给水侧端的扰动,稳定给水流量在一定的稳定范围。在水位控制中起辅助作用,称之为水流量回路。另外一条由调节算法、水位变送器、整个内回路及对象控制通道所构成的回路,称外回路。消除外部各种干扰岁水位值得影响,维持汽包水位与给定值接近。在图中可以看到蒸汽流量是前馈信号,在系统中形成开环,但是不影响两个闭环的稳定性。在系统中与给水流量信号配合,达到期望的水位值,另一方面改善蒸汽量干扰下对水位的控制品质,克服虚假水位所引起的调节算法的误动作输出。
根据以上系统动态特征的分析来设计汽包水位值的自适应调节,设计是必须考虑给水量和蒸汽量的阶跃变化,这两个因素是引起水位值变化的主要因素,调节器则根据水位实际值与设定值的偏差去控制水位调节阀,将水位值控制在预设的正常范围内。通过上述分析,在系统中进行仿真实验,如图5所示。加入模糊控制后能达到系统的控制要求。
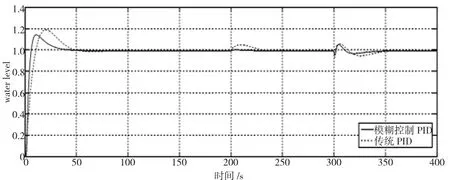
图5 模糊控制仿真波形
4 结语
本文采用了模糊算法结合PID 控制的方案。主要针对火电厂锅炉汽包水位对象复杂,干扰因素多难以控制的问题,在分析被控对象的特性后,首先建立了系统模型,并对PID 的控制系数按照要求进行在线自整定。通过MATLAB 中的simulink 仿真工具箱建立仿真系统模型,对汽包水进行控制,可见模糊PID 控制具有过渡时间更短、超调量更小,能够快速调整实现稳定输出。在蒸汽扰动和给水扰动下具有较强的抗干扰能力,由此可得在锅炉汽包水控制系统中模糊PID 控制系统作用效果最好。
猜你喜欢
江苏广播电视报·新教育(2022年1期)2022-05-15
当代水产(2022年3期)2022-04-26
机械管理开发(2022年1期)2022-03-24
青海电力(2022年1期)2022-03-18
汽车实用技术(2020年21期)2020-12-09
发电设备(2020年5期)2020-10-09
航空发动机(2020年1期)2020-06-13
爆炸与冲击(2017年1期)2017-04-10
山东工业技术(2016年15期)2016-12-01
中国新技术新产品(2011年23期)2011-12-31