GeoSLAM Horizon 3D系统用于地形图修测的分析
2022-05-09 02:08:28陈鹏
城市勘测 2022年2期
陈鹏
(福州市勘测院,福建 福州 350003)
1 引 言
SLAM(Simultaneous localization and mapping),意为“同步定位与建图”,即扫描仪在一个位置开始移动,利用激光点云的处理算法,从杂乱无章的点云中找到线索,求取其中隐含的更稳定的高阶特征点和特征向量,并连续跟踪这些特征点和特征向量,进而高精度地动态反向解算扫描仪的位置和姿态[1]。
因在进行数据采集时无须GPS信号及大量的标记点,SLAM技术适用于室内室外场景,对于解决传统测绘中的定位及场景重建问题具有广阔的前景。基于SLAM技术的移动测量系统在多个测绘领域发挥作用[2,3]。本文中所举实例福州市人民公园小区的建筑物、植被密集,目前的移动测量系统因需要依赖全球卫星导航系统(GNSS)和惯导系统(INS),利用它们做地形图修测项目效果不佳。而SLAM技术因其自身的技术特点,可满足该小区地形图修测的需求[4]。
2 测区概况
人民公园小区位于福州市仓山区上三路与复园支路路口,占地约14.6亩,含6座建筑物(8层楼5座,1层楼1座),本文拟采用GeoSLAM Horizon3D系统对其进行三维激光扫描、数据处理,并更新小区的地形图。
3 作业方法
3.1 外业作业步骤及耗时情况
GeoSLAM设备外业扫描共分为控制点布设和测量、现场准备与数据采集三个步骤,累计耗时约 1 h 20 min左右。
(1)控制点与检核点的布测
GeoSLAM生产的点云数据为自由坐标,布设控制点的目的是对点云数据进行坐标纠正,并赋予点云数据绝对坐标。
本次测量在人民公园小区的4个角点布设4个控制点,耗时约 1 h。为节省控制点测量的时间,控制点布设也可与激光扫描同时进行,扫描结束后再对控制点坐标进行采集。小区的控制点位分布如图1所示。

图1 人民公园小区控制点分布图
为检测激光点云的平面坐标及高程的精度,本文选取54个特征点作为检核点,并用传统方法测量其平面位置与高程。其中21个墙角点用以检测点云的平面位置精度,33个地面点用以检测点云平面位置及高程精度。
(2)现场准备:从背包里取出仪器,安装,静止 30 s后即可进行数据采集。本步骤耗时约 3 min。
(3)数据采集:手持GeoSLAM设备绕测区进行扫描作业,扫描作业时注意覆盖小区完整的范围,遇控制点时,将GeoSLAM设备外接的基准标定板十字孔中心对准控制点静止放置 5 s以上,使GeoSLAM设备能够自动识别并记录控制点的位置,最后需确保仪器回归到初始位置,结束扫描。人民公园小区外业扫描耗时 17 min 23 s。
3.2 数据预处理
(1)原始数据解算
将原始数据导入预处理软件GeoSLAM Hub里进行解算,解算数据所需时间与电脑的配置以及扫描数据量有关,本步骤耗时约 30 min。
(2)数据坐标转换
原始数据解算输出的是自由坐标的点云,将所测控制点坐标输入GeoSLAM Hub软件,可进行点云的坐标转换,误差解算,生成精度报告等。据测算,本次人民公园小区的测量中误差为 5 cm。本步骤耗时约 5 min。
4 GeoSLAM horizon3D系统点云精度分析
利用GeoSLAM生成点云的点位中误差为 5 cm,点云三维模型如图2所示。

图2 GeoSLAM生成的点云图
利用传统方法测量的检核点的平面坐标、高程与利用点云刺出的同名检核点的平面坐标、高程做比较,分析点云数据绘图的精度。
21个房角检核点全部成功刺点。21个房角检核点平面坐标与点云刺点平面坐标平均较差为 2.80 cm,其中最大值为 6.11 cm。
33个地面平面高程检核点中,因受车辆和植被遮挡、扫描作业时未走到正确的位置等因素影响,15个点位无法有效刺点。剩余18个有效点位的平面精度的平均值为 6.32 cm,最大值为 12.25 cm,高程精度的平均值为 5.98 cm,最大值为 11.01 cm。
根据以上精度分析,GeoSLAM设备生产的点云数据可基本满足小区地形图修测的要求。
5 点云数据处理
首先,利用GeoSLAM Hub软件读取GeoSLAM Horizon3D设备中的点云数据。获取LAS格式的点云数据后,使用Quick Terrain Modeler(QTM)软件进行点云数据浏览、检查点云数据效果、分析数据分层、查看点云着色、检查地面标线等操作,以检查点云数据的质量情况。
其次,利用Terrasolid软件的滤波去噪功能可平滑密度不规则的点云数据、去除因遮挡等问题造成的离群点、重采样大量点云数据、去除噪声数据,进一步提高点云数据质量。利用Terrasolid的抽稀功能可适度减少点云数据量,以此减少点云数据对软硬件设备存储及显示等功能的需求,同时避免人力资源与计算资源的浪费。
最后,利用清华山维EPS软件点云处理模块进行地形图的绘制。清华山维EPS点云处理模块可同时加载点云数据与影像数据,并可实现二维空间与三维空间的联动,绘制地形图方便、快捷。除传统的绘图功能外,清华山维的点云处理模块中的点云切片功能、点云着色、点云编辑等功能让绘图更直观。
6 GeoSLAM Horizon3D系统更新地形图的优缺点分析
6.1 GeoSLAM Horizon3D系统的优点分析
首先,GeoSLAM生产的点云数据应用于地形图修测时,外业测量时间大大缩短;其次,点云数据平面精度高,且在保障精度的情况下,覆盖范围更全面;第三,点云的地面点高程的精度可靠[5];第四,点云的穿透能力强,可在一定程度消除遮挡的影响;最后,点云数据可以实现三维浏览巡图。
(1)外业测量耗时少
利用传统的作业方法,修测人民公园小区地形图耗时约为 3 h,而利用GeoSLAM设备对人民公园小区扫描外业共耗时 1 h 20 min,除去布设控制点所耗 1 h外,扫描时间仅耗时 20 min。大大节省了外业的人力资源,提高了外业作业效率,为测量数据获取的技术革新提供了一种新方法。
(2)点云数据平面精度高且覆盖范围全面
利用GeoSLAM设备生产的点云数据可全面、清晰、准确地勾绘房屋的轮廓。
图3为点云切片数据叠加背景地形图的效果图,相比矢量数据,此图可清晰分辨房屋轮廓,勾绘房屋更加方便、快捷;
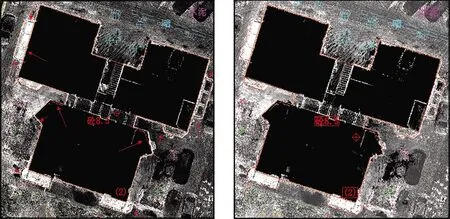
图3 编辑前(点云+地形图) 图4 编辑后(点云+地形图)
北侧墙体部分在点云扫描之前刚刚完成了地形图的更新,可认为其精度是可靠的,而此部分墙体的轮廓与点云数据的吻合度非常高,表明点云数据的平面精度是可靠的;
在房屋中间凹处及阳台等隐蔽区域,背景地形图的房屋轮廓与点云数据存在多处较大的位置偏差(箭头处所示),经检核,点云精度较为可靠。由此可见,点云数据可在保障精度的前提下,覆盖范围更加全面。
图4为利用点云数据修正地形图后成果图。
(3)点云地面高程精度可靠
利用点云数据提取地面以上地物(如花坛、矮墙等)的特征点时,特征点位精度容易受点云密度、操作人员刺点经验等因素的影响,高程精度浮动较大。而地面点位则不受上述因素影响,仅仅取离地面点位较近的点位即可,在保障点云密度的情况下,精度可优于 3 cm。本文4个控制点的高程与点云数据的较差均在 3 cm以内,点云数据较高的地面高程精度亦适用于土方测量、道路测量等领域。
(4)点云穿透能力强
如图5所示,GeoSLAM设备的发射源位于地面,其生产的点云数据不仅可体现植被底部的信息,而且可体现植被外边缘的信息,可见其具备较强的穿透性。因其具备高穿透性能,利用点云数据绘制地形图可大大减小遮挡的影响[6],消除绘图盲点。利用EPS点云处理模块的切片功能,可参考不同切面的点云数据,从多个角度分析、绘制地形图,可大大提高作业的效率和准确率。

图5 激光点云穿透性
(5)点云具备三维效果
相比二维地形图,点云数据可进行三维展示,选择不同的着色方式对点云进行着色,点云的视觉效果会相对形象、直观。在点云数据的三维视图中浏览地形图,可对地形图进行查缺补漏、发现地物是否有明显位置偏差,初步实现巡图的功能,如图6所示。

图6 三维浏览地形图
6.2 GeoSLAM Horizon3D系统的缺点分析
(1)点云数据绘图不直观
点云数据由众多独立的点聚集而成,相比三维影像模型,点云数据绘制地形图时缺乏直观性,需要考验绘图人员的想象力。点云密度、点云着色方式等因素影响地形图地物、地貌的分辨、判断,内业的作业效率偏低。
从事地形图修测的任务生产时,绘图人员尚能借助背景地形图理解点云数据,若是从事如竣工地形图等白纸测图的任务,点云数据缺乏直观性的问题便会愈发凸显,绘图难度大大增加。
(2)点云数据绘图具有局限性
利用点云数据很难去分辨一些常见地物,如小区内部停车用的植草砖,地面材质如铺砖、铺石、水泥、沥青等,黄色的车位标线,部分井盖等地物,给地形图的绘制带来极大不便。
(3)遮挡的影响仍存在
虽然点云数据具有很强的穿透能力,而且点云处理软件具有切片功能,但是点云数据依然在一定程度上受到遮挡的影响。本文花圃中的植被过于茂密,大部分点云无法穿透植被至其底部的花坛,导致花坛线的点位密度低,而无法有效完成地形图的绘制。
6.3 GeoSLAM Horizon3D系统更新地形图的优缺点总结
点云数据用于地形图修测任务生产时具备许多优点,同时其缺点也是显而易见的,表1罗列其优缺点,生产作业时可扬长避短,提高作业效率。
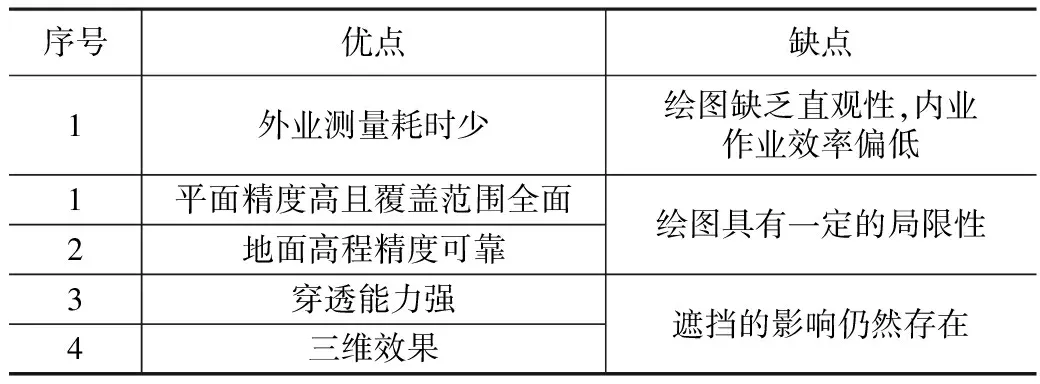
点云数据应用于地形图修测的优缺点总结 表1
7 建议与展望
7.1 GeoSLAM Horizon3D系统扫描作业方法的改进
外业扫描时作业人员未经过正确的位置,便会导致一些地方点云密度偏低而不足以辨认地物。图7中,作业人员扫描时途径花圃左侧,因此,花圃左侧的点云密度高,花圃轮廓清晰可见。因作业人员未途径花圃右侧与建筑物间的小路,图中箭头所示,所以花圃右侧边界线上点云密度低,从而影响花圃地类界的绘制。

图7 花圃的扫描方法
为此,作业人员在扫描之前,应提前规划扫描路线,扫描路线应完整覆盖小区内部的目标地物、地貌,作业时严格按照预定的规划路线进行扫描,以便完整地覆盖整个小区[7]。
7.2 GeoSLAM Horizon3D系统与倾斜摄影模型完美互补
由本文第6节可知,点云数据用于地形图修测任务时,优点很显著,同时缺点也很明显。而倾斜摄影模型近些年也广泛应用于地形图的绘制中,但是倾斜摄影用于绘图也存在一些缺点。笔者总结一下4个原因说明二者的优缺点完美互补,在实际生产中可配合使用。
(1)倾斜摄影数据源位于空中,地物易受植被遮挡;GeoSLAM Horizon3D系统数据源位于地面,且点云穿透能力强,可有效弥补倾斜摄影模型的盲点。
(2)倾斜摄影模型采集的点位高程精度低;点云数据的高程精度,尤其是地面点高程精度高,在提取地面点高程时,可用点云数据替代倾斜摄影模型[8]。
(3)利用倾斜摄影测量房屋精度易受飞行高度等因素的影响,不稳定;本文点云数据测量房屋精度达 5 cm,利用点云数据绘制建筑物的轮廓可以满足一般工程测量的需求。
(4)倾斜摄影三维模型绘制停车位、地面材质、井盖等方便、快捷,可替代点云数据完成此项工作。
猜你喜欢
西部交通科技(2021年9期)2021-01-11 12:55:36
当代陕西(2020年23期)2021-01-07 09:24:44
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
中国资源综合利用(2017年2期)2018-01-22 02:45:02
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
石家庄铁路职业技术学院学报(2017年4期)2017-05-25 13:26:41
中国工程咨询(2017年12期)2017-01-31 02:56:54
中国房地产业(2016年2期)2016-03-01 01:25:35
安徽地质(2016年4期)2016-02-27 06:18:21
全球定位系统(2015年4期)2015-02-28 12:38:13