玉米播种机地面信息采集系统的研究与试验
2022-05-07 06:49:32张博张伟付晓明
黑龙江八一农垦大学学报 2022年2期
张博 ,张伟 ,付晓明
(1.黑龙江八一农垦大学信息与电气工程学院,大庆 163319;2.黑龙江八一农垦大学农业工程博士后科研流动站;3.黑龙江八一农垦大学工程学院)
作物的出苗率、幼苗生长受到播种深度的影响[1-3],合理、一致的播种深度可提高作物出苗率、苗品质及作物后期长势,有利于提高作物产量[4-5]。播种作业中开沟深度是影响播种深度的主要因素之一[6],高性能仿形机具可使播种机开沟器随地形变化并始终保持稳定的工作深度,是播种机控制开沟深度的重要手段[7-9]。现有播种单体仿行机构从播深控制方式上分为被动和主动调节两种方式[10],被动调节方式受到播种单体重力和地面支撑力的影响造成地面适应性差,主动调节开沟深度控制动力由仿形机构自身提供,地面适应性较好[11]。主动式仿形机构中地面高度变化信息采集的精度直接影响到开沟深度的准确性、均匀性[12],因此地面高度变化的准确采集是设计主动式仿形机构的关键之一[13]。
地面高度变化信息采集主要有接触和非接触式测量[14-16],目前国内多采用接触式地面高度变化测量系统,先后有学者采用仿行拖板或地面滚动轮作为触地部件,利用电子尺、角度传感器及开关传感器采集触地部件的位移和角度变化信号,实现地面高度变化测量[17-22]。Mouazen A M、Saeys W 等[23-24]通过触地式压力传感器采集地表高度变化对传感器产生的冲击来测量高度变化,Jensen LD[25]将深度控制轮上安装传感器,通过感知深度控制轮上的符合来测量地面高度变化,Anthonis J[26]研究表明该种方法测量精度受地表密实程度的影响;Zhao Jiale[27]将PVDF 形变传感器安装于地轮内表面,由车轮形变决定传感器输出电压,并通过建立的电压信号与形变关系模型检测地面高度变化;Zielke R[28]研究了一种移动式实时土壤湿度检测传感器,以合理湿度的土层深度作为播深控制的依据,该种播深控制土壤检测方法目前还处于推广阶段;温丽萍[30]研究表明接触式测量地面测量方式直接,外部环境干扰较小,但高速播种条件下触地部件上下移动时产生的惯性会造成惯性误差影响测量结果,同时伴随着长期使用会有部件磨损精度下降情况出现[29],故采用非接触测量方式可有效避免磨损和机械惯性产生的测量误差。
针对主动式播深控制装置接触式地面变化信息采集系统惯性和机械磨损产生检测误差造成控制精度降低的问题,设计了一种基于单片机控制的非接触式测量的地面高度变化信息采集并以及地面变化适应性液压播深控制系统,可具备地面高度变化信息高精度采集并通过变速液压控制降低播种单体震动误差的功能,为播种机及其他随地高作业部件的地面高度变化信息采集和变速控制提供一种解决方法。
1 系统结构及工作原理
1.1 系统结构与技术参数
播深控制装置地面信息采集及适应性电液系统结构框图如图1 所示,系统主要由地面信息测量硬件(地面高度信息采集传感器,地面相对速度传感器)、单片机控制系统、主动播深控制系统和采集系统机械结构等组成。系统单片机电路部分包含连接测距传感器的A/D 转换的输入端,可实时将传感器传来的模拟信号转换成数字信号,1 路数据输入接口进行单片机数据读取,两路带继电器开关的D/A 输出端输出控制信号,如图2 所示。地面高度信息采集系统安装结构简图如图3 所示,包含测距传感器组和传感器安装组件。系统主要技术参数:响应时间0.03 s,高度测量范围20~500 mm,测量范围内精度为±1 mm。

图1 播深控制装置地面信息采集及适应性电液系统结构框图Fig.1 Block diagram of ground information collection and adaptive electro-hydraulic system of broadcast control device

图2 地表高度信息采集系统电路图Fig.2 Surface altitude information acquisition system circuit diagram

图3 地表高度信息采集系统安装结构简图Fig.3 Simplified diagram of the installation structure of the highly variable collection device
1.2 工作原理
系统运行前,在单片机上设定传感器与地面距离的初始位置;测量时地表高度检测机构随田间起伏上下浮动,为开沟深度提供基准;当开沟器正前方传感器采集到距离变化量超过合理变化量时,单片机将该传感器采集的数值信息与其余4 个传感器采集的信息进行对比,并通过差值分析得到开沟器正前方传感器产生探测距离变化的原因,当判定变化是由地表高度变化产生,单片机对变化量运算并输出仿形控制信号,反之将该变化量视为无效不进行仿形控制。
2 关键部件设计
2.1 传感器选择
目前非接触式有源测距包括激光雷达、超声波、红外光和连续波雷达等[33-45]。红外线相比超声波传具有播速度快、传播指向性好、发射功率可控性强和抗干扰能力突出等优点[46-51],因此选择红外测距传感器运用其三角测距的方式进行距离测量[52](图4)。其原理是红外发射器按照一定的角度发射红外光束,遇到物体后光束返回,反射光线被CCD 检测器采集到后,会得到偏移值L,利用三角关系,在已知发射角度a、偏移值L、中心矩X、以及滤镜的焦距f 以后,通过几何关系可以计算出传感器到物体的距离D。由于采用三角测距原理该传感器测量扫描的范围不是一个面而是一个点,因此需要多个传感器阵列组合并通过联合工作达到采集地面区间变化的目的。

图4 三角测距原理Fig.4 Principle of triangular distance measurement
2.2 传感器位置及数量设计
整地后耕地土块最大直径小于50 mm[53],保护性耕作玉米收获时将秸秆粉碎还田,被粉碎的玉米秸秆平均长度为52 mm,未被完全粉碎的残茬尺寸在100~250 mm[54]。对地表距离信息采集时有土块或秸秆出现在传感器测量区域会产生采集的地表高度变化信息与实际不符的情况,导致错误的仿形控制,采用多传感器数据实时比对方法可降低杂物对整体采集的干扰,从而能有效减少这一情况发生。
为防止未被完全粉碎的秸秆同时出现在所有传感器的被测区域造成无传感器采集到真实地表变化信息,应要求每个测距传感器最小距离应大于未被完全粉碎土块尺寸(50 mm),地面高度信息采集组件最大探测面应大于玉米最大秸秆残茬尺寸(250 mm)。以此为依据,设计地面高度信息采集组件由5 个垂直排列于播种机前进方向红外测距传感器组成,每个红外测距传感器的距离为70 mm,探测面幅为280 mm(图5,图6),中位传感器探测点与开沟器位于同一纵向轨迹。

图5 红外测距传感器安装位置Fig.5 Location of infrared distance sensor

图6 红外测距传感器组Fig.6 Infrared ranging sensor group
2.3 非必要仿形控制原理
通过实时对比测距传感器组件传来的5 点地面高度变化信息,分析出使传感器测量数据产生变化的原因,区分真实地表高度变化或杂物干扰并进行仿形决策,降低地表杂物对测距传感器干扰而产生非必要仿形情况的发生,提高仿形正确率。
在非必要仿形控制程序中设置开沟器正前方的红外测距传感器为主传感器。当主探头探测到距离变化时,单片机将主传感器信号与两翼四个传感器的即时信号进行对比分析后决策是否仿形,若仿形则按照主探头采集到的地面变化数据进行仿形控制。因此研究主探头探测到高度变化时的地面可能存在的情况进行分析,以此确定必要仿形控制方案。
在不同地面情况下,各传感器采集到的地面变化信息不同和仿形决策不同:
当开沟地面为平整度较好、高度变化为整体性变化的情况时,主传感器采集到高度变化信息且与其余4 个传感器差值小于5 mm 时,系统决策后进行仿形控制;
当播种地面为整地后所产生的垄沟带时,该地貌下探测幅宽内各测点高度不同,前进方向一段距离内变化一致,主传感器采集到的距离信息是持续的并在合理波动范围内的值,合理波动范围≤5 mm,系统决策后进行仿形控制;
当遇到有小块的地面凸起和凹陷、土块、完全露或半露于地表的玉米秸秆出现的地况时,主传感器采集到距离变化信息,辅助传感器信号没有或有较小变化,系统决策后不进行仿形控制;
在地面平整度较差的地况作业时,5 点传感器测量位置各不相同,此时系统根据主传感器采集到的持续变化信号延续时间情况进行仿形决策,当遇到开沟器位于地面持续性隆起或凹陷的情况时,既变化信号延续时间≥0.1 s 时系统进行仿形控制,反之不进行控制。
如图7 所示,开沟器位于整地后的垄沟带时传感器组采集到的信号变化信息与小块的地面凸起和凹陷、土块、完全或半露于地表的玉米秸秆出现在开沟器前方时各传感器信号变化信息相似,不同的是前者主传感器采集到的地面变化信息具有持续性。为区分两种地面情况,引入主传感器信息采集计时,主传感器采集到地表高度信息变化且与其余四个传感器差值大于合理值时,开始对主传感器进行信号计时,当大于设定计时时间进行仿形控制,反之不做控制。玉米播种作业时前进速度为5~8 km·h-1,种植间距为20~25 cm 每株,平均每株播种时间间隔0.4 s,设定计时时间0.1 s(0.1 s 播种机前进距离为139~222 mm)。根据不同地表高度变化时传感器组各传感器采集信号变化特点,设计仿形控制程序,程序控制流程图如图8 所示。

图7 地表小型土包与带状升高Fig.7 Surface small soil bags and ribbon increa

图8 地表小型土包与带状升高Fig.8 Surface small soil bags and ribbon increa
3 非必要仿形控制试验与结果分析
对设计的多点地表高度变化信息采集系统进行试验,通过静态和动态试验测试其非必要仿形控制可行性、准确率和稳定性。
3.1 试验设备
非必要仿形控制试验在搭建的地面信息采集试验台上进行(试验台通过轨道轮在土槽轨道上移动,保证测试过程中传感器组的水平高度不变,试验台上测距传感器组与标准地面距离350 mm),通过固定装置连接在土槽试验车上,以土槽试验车作为牵引动力源。试验系统如图9 所示。

图9 地面信息采集试验台与土槽试验车Fig.9 Ground information acquisition test bed and earth tank testing vehicle
3.2 试验前准备
试验前先将土槽土壤整备均匀,根据整地后播种地面情况制作出地表升高降低(编号1~6)、地面坑洼凸起变化(编号 7~10)、垄沟带(测点编号 11、12)以及布置由土块和未完全粉碎的玉米秸秆等布置的杂物点(土块测点13~16;秸秆测点17~26)。在与测点平行位置的轨道侧安装定位用接近传感器金属模块,土槽检测试验带如图10 所示。

图10 土槽检测试验带Fig.10 Earth slot detection zone
3.3 试验内容
地面传感器组静止状态下测试地表高度变化信息采集系统在对坑洼、凸起以及放置土块、玉米秸秆等杂物无需仿形控制时的仿形决策。在玉米播种作业上限速度(8 km·h-1)时对地面升起,垄沟带的检测精度,以及仿形决策的准确率。
3.4 试验结果分析
3.4.1 静态测量试验结果分析
静态测量点为1~12 地面点,地面变化高度数据与五次试验测量数据(表1),将5 次测量误差做线形图(图11),静态测量误差平均值为1.67 mm,标准差计算公式(公式1-1)算得总体静态数据误差标准差σ 为1.80,系统稳定性94.5%,测量精度满足系统设计要求。
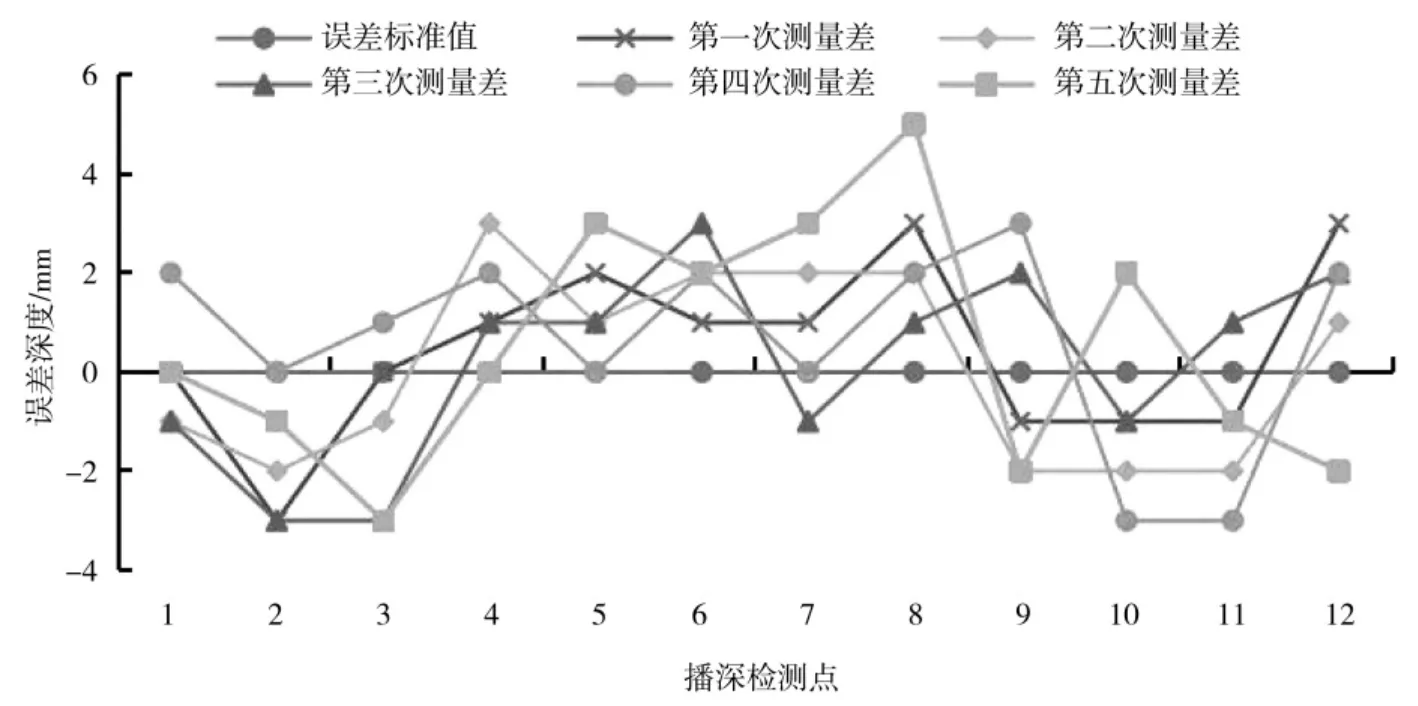
图11 静态测量误差Fig.11 Static measurement error

表1 静态测量数据Table 1 Static measurement data

静态测量状态下,整体地面高度变化测量数据误差标准差σ 为1.84,系统稳定性93.9%;地面单点高度变化和垄沟带误差标准差σ 为2.13,系统稳定性95.1%。
3.4.2 动态测量试验结果分析
动态测量点为1~26 地面点,其中13~26 点为仿形决策测试点,在8 km·h-1前进速度测量状态下测量个点数据(表2),用设定的地面变化高度数据与5次试验测量数据算得的误差值做线性图,如图12 所示。动态测量值与静态测量值相近,开沟测量误差平均值为2.3 mm,动态数据误差标准差σ 为2.77,稳定系数92.1%。动态测量状态下,整体地面高度变化测量数据误差标准差σ 为2.63,系统稳定性93.1%;地面单点高度变化和垄沟带误差标准差σ 为2.93,系统稳定性91.8%。在13~26 测量点皆为设置的地表杂物点,因此正确的控制输出值应为0 mm,出现变化既为仿形决策错误,非必要仿行控制数据见表3,非必要仿形控制程序的准确率为97.1%,系统稳定性94.1%。

图12 动态测量误差Fig.12 Dynamic measurement error

表2 动态测量数据Table 2 Dynamic measurement data

表3 非必要仿行控制数据Table 3 Non-essential copy control data
4 讨论
基于上述分析,设计通过静态与动态两种方式对地面高度信息采集系统进行试验,试验方法及系统响应时间0.03 s 与温丽萍的研究相同[21],但测量精度更高。系统采用多点有源探测方式进行地面高度变化信息的采集,通过仿形程序对多组地面变化信号的计算和筛选后进行仿形决策,相比单点源测量通过单组地面变化信号控制播深[11,55],有效提高了播深控制决策的准确率,降低了错误仿形情况的发生。相比传统机械式和接触式的地面探测[13-14,17],在结构简化的同时避免了机械磨损。通过室外试验研究发现,在实际田间作业中尤其是在高强度阳光直射传感器的情况下,测距传感器偶尔会受到直射日光的干扰,因此在实际作业时应在传感器组外侧加装一圈小型的遮光板,从而避免阳光直射的情况出现。
5 结论
设计了玉米播种机单体仿行机构多点地表高度变化信息采集系统,该系统响应时间为0.03 s,高度测量范围20~500 mm。具有非必要仿形控制功能,可降低因地表杂物对传感器的干扰而产生错误仿形的情况发生,为播种机地面高度变化信息采集系统的设计提供参考。
猜你喜欢
中阿科技论坛(中英文)(2021年2期)2021-03-17 02:40:42
农机化研究(2020年2期)2020-10-17 00:59:16
学生天地(2020年14期)2020-08-25 09:20:58
科学(2020年3期)2020-01-06 04:02:51
特别文摘(2018年3期)2018-08-08 11:19:42
农机化研究(2018年8期)2018-07-10 11:39:26
电子制作(2017年7期)2017-06-05 09:36:13
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:02
诗选刊(2015年6期)2015-10-26 09:47:11
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55