基于轮速信息的ABS参考车速算法研究★
2022-05-06 12:51陈彩燕欧学仕梁静强
现代工业经济和信息化 2022年2期
陈彩燕,白 帆,欧学仕,梁静强
(上汽通用五菱汽车股份有限公司,广西 柳州 545007)
引言
ABS参考车速的估算,国内常见的有最大轮速法、斜率法、综合法、自适应斜率法和基于卡尔曼滤波法等。最大轮速法[1],是取四个车轮轮速的最大值(简称最大轮速)作为车身的参考车速。斜率法[2],是根据试验数据结果事先确定一个平均减速度,然后用这个平均减速度计算参考车速。最大轮速法和斜率法虽然简单,但是与实际车速相差大。综合法,选取最大轮速法与斜率法中较大的值作为参考车速,此方法虽然相较于前面的最大轮速法和斜率法有所改进,但是自适应能力较差。自适应斜率法[3],实时调整斜率法的初始点和车身参考减速度,将斜率法计算出的参考速度与最大轮速进行比较,较大者作为参考车速。基于卡尔曼滤波法[4],此方法是基于卡尔曼滤波进行参考车速的计算。自适应斜率法和基于卡尔曼滤波法两者适应性强,但算法都较为复杂。
王伟达、丁能根、徐向阳和杨磊等人提出的ABS参考车速自适应算法,其思路是:第一个控制循环根据经验值设定车身参考减速度,然后再根据斜率法进行后续控制循环的时参考车速的计算,在后续控制循环中他们认为在阶梯增压开始时,车轮速度较为接近车身速度,阶梯增压开始时刻为控制循环的起止点。郑太雄、单荣明、将国英、杨勇等人提出的ABS参考车速综合算法,其思路是[5]:先根据整车动力学分析进行首次制动循环时的参考车速计算,然后再根据斜率法进行常规制动循环的时参考车速的计算,轮速相连两个峰值的斜率是车身参考减速度,在常规制动循环中他们认为峰值点的轮速最为接近车速,轮速峰值点时刻为控制循环的起止点。这两篇研究的关键都是算法控制循环的起止点,但研究中都没有详细给出控制循环起止点是如何确定。因此,本文在他们研究的基础上提出一种改进的参考车速综合算法。
1 改进的综合法
ABS制动过程中轮缸压力和轮速的变化,一般分为5个变化过程[6]:过程1,轮缸压力随着主缸制动压力的增加而增加;过程2,车轮出现抱死趋势,进入压力保持阶段;过程3,车轮进一步出现滑移,进入压力降低阶段;过程4,进入压力保持阶段让车轮恢复稳定;过程5,车轮稳定后制动压力再次增加,进入下一个控制循环。因此,轮速在这样的控制循环下,出现了轮速峰值。
本文研究的ABS参考车速综合算法,根据轮速信息进行估算。由于制动开始时车轮轮速信息有限,不能通过轮速信息计算参考减速度,因此ABS参考车速估算分为第一个参考车速估算循环和后续参考车速估算循环。
在第一个参考车速估算循环中,制动踏板踩下一定时间后,采用最大轮速作为车身参考车速估算的起始点。当最大轮速还没有出现终止点时,采用斜率法进行参考车速估算,然后根据经验用一个固定的值作为参考减速度。当最大轮速出现峰值且出现峰值时刻与起始点的时刻间隔大于一定时间时,则该时刻为参考车速估算的终止点。
最大轮速是否进入第一个参考车速估算循环的判断条件:

式中:TBP为制动踏板踩下的时间;TCB为时间标定量;AW为当前时刻最大轮速加速度;ACW为加速度标定量。
第一个参考车速估算循环,参考车速计算公式如下:

式中:vf为车身参考车速;vmax为最大轮速;A0为初始减速度。
Zeff认为经济后果为:利益相关者作出投资决策依赖财务报告,财务报告是否真实会对利益相关者决策的科学性和合理性产生很大影响,利益相关者行为又可能对与其有关联的个人或组织的利益产生影响。
在后续参考车速估算循环中,根据最大轮速法和斜率法相结合的综合法估算方法来计算参考车速。在最大轮速达到峰值点的时刻,最大轮速较为接近车身速度,这一时刻作为上一个控制循环的终止点和下一控制循环起始点。当最大轮速达到峰值点时重新计算下一周期的参考减速度。
后续参考车速估算循环,是否为最大轮速峰值点的判断条件如下:

式中:SMW为当前时刻的最大轮速;AN为车轮当前时刻前一控制周期最大轮速的轮加速度;AW为当前时刻最大轮速的轮加速度;T0为最大轮速达到峰值点后经过的时间;Tc为时间标定量。
后续参考车速估算循环,参考车速计算公式如下:

式中:vf为车身参考车速;vmax为最大轮速;ax为车身参考减速度。
2 算法程序与验证
2.1 算法程序
改进的ABS参考车速综合算法基于MATLAB软件建立模型,其步骤如图1所示算法流程图:
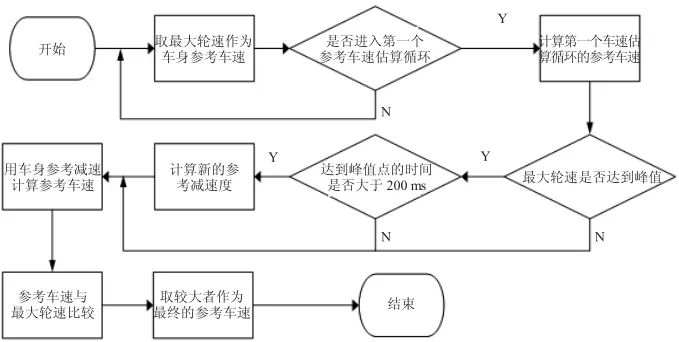
图1 算法流程图
2.2 算法验证
本文ABS参考车速算法模型的验证,用某汽车的实车道路试验数据进行对比验证。如表1所示参数说明表是算法模型验证时示波器显示结果的参数说明:
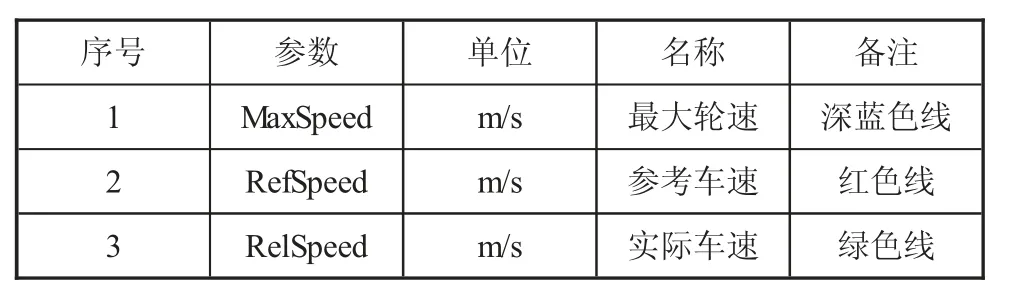
表1 参数说明表
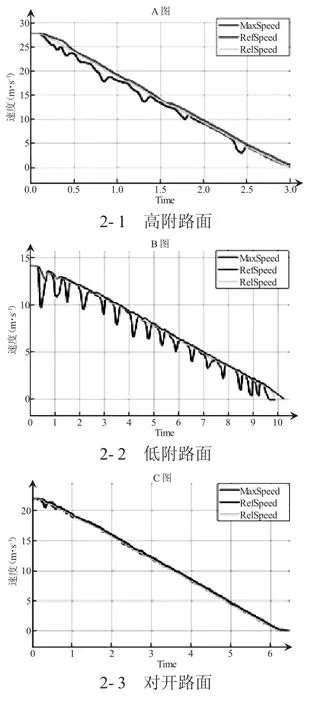
如图2所示路面试验图为高附路面(图2-1)、低附路面(图2-2)、对开路面(图2-3)、对接路面(图2-4)的试验结果图,从图2中可以明显地看出高附、低附、对开与对接这四个路面试验结果的参考车速(RelSpeed)与实际车速(RelSpeed)都非常相近,其中高附、低附、对接路面的试验结果明显表明满足条件的最大轮速峰值最接近车身车速。

图2 路面试验图
四种典型工况的道路试验结果表明,高附路面试验计算出的参考车速与实际车速的差值小于0.45 m/s,低附路面试验计算出的参考车速与实际车速的差值小于0.25 m/s,对开路面试验计算出的参考车速与实际车速的差值小于0.30 m/s,他们的百分比(差值除以参考车速)都小于5%。对接路面试验计算出的参考车速与实际车速的差值小于0.50 m/s,对接路面试验的百分比(差值除以参考车速)小于6%。
3 结语
本文通过ABS参考车速算法的研究与验证得出以下3点结论:
一是改进的综合算法给出了控制循环的起始点是如何确定的,即最大轮速峰值的判断条件;二是从本文的试验结果可以看出,最大轮速峰值与参考车速最接近;三是该算法准确性好、适应性强,基于本文所用的试验数据,在高附、低附、对开等路面试验中得到的百分比均在小于5%,在对接路面试验中得到的百分比小于6%。
猜你喜欢
汽车安全与节能学报(2022年2期)2022-07-17
汽车实用技术(2022年10期)2022-06-09
汽车实用技术(2020年24期)2021-01-05
河北理科教学研究(2020年2期)2020-09-11
物理之友(2020年12期)2020-07-16
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
福建中学数学(2016年7期)2016-12-03
汽车维护与修理(2015年5期)2015-02-28