雷达通信一体化:共用波形设计和性能边界
2022-04-30 02:00马丁友刘祥黄天耀刘一民
雷达学报 2022年2期
马丁友 刘祥 黄天耀 刘一民
(清华大学电子工程系 北京 100084)
1 引言
雷达和通信在军事与民事领域具有重要应用。为了实现协同作战,作战平台上需要同时装配有雷达和通信设备,以将探测数据传给其他平台和控制中心。在民用领域,随着信息化和智能化的发展,通信和雷达技术将广泛应用于智慧生活、社会治理、产业升级等方方面面[1]。在传统设计中,雷达和通信分别使用不同的硬件和频谱资源。这种分立设计导致了系统的体积、功耗和成本的增加,以及系统电磁兼容性的下降。为了克服分立实现的缺点,军事和民事领域对雷达通信一体化设计都开展了深入研究[2–9]。军事领域对多功能一体化平台开展了相应研究,比如美国海军的“AMRFC”计划[10]、美国国防高级研究计划局的“CONCERTO”计划[11]等。在民用领域,以智慧交通[12]、智能家居[13]、人体行为检测[14]为应用背景的雷达通信一体化研究也成为研究的热点。
雷达通信一体化可以通过资源分配和共用波形两种方式实现。资源分配通过协调雷达和通信使用的时间[14,15]、频谱[16]、阵列[17,18]等资源,以避免两种功能之间的干扰。这种方式实现简单、灵活性高并能够兼容现有体制,但是存在雷达和通信没有充分使用所有资源的缺点。共用波形的实现方式通过发射共用波形来同时实现雷达探测和通信数据传输的功能,功率和频谱资源使用效率高,能够从根本上避免跨系统干扰,因此受到了雷达通信一体化领域的广泛研究。
雷达通信一体化共用波形需要同时完成通信传输和雷达探测的功能,既需要考虑雷达和通信的理论性能,还需要关注硬件实现的复杂度、功率效率等工程实现问题。当前的雷达通信一体化研究提出了很多共用波形,但是由于缺少统一的衡量标准,很难确定何种共用波形更适合什么场景。比如在有些研究中通过通信波形实现探测功能,虽然保证了高速通信但是却降低了雷达性能[19–21]。与此相对,有些研究将通信信息嵌入雷达波形[22–25],保证了雷达性能但是却存在通信速率较低的问题,因此只能作为现有通信方式外的额外补充。
本文的目的有两点。首先对现有研究中的共用波形进行综述,明确各类共用波形的基本原理以及优缺点。本文将现有一体化共用波形分为3类:基于通信波形的共用波形、基于雷达波形的共用波形和基于联合设计的共用波形。针对每一类波形设计方式,本文结合雷达和通信对性能的要求与约束对其基本原理、具体类别、信号处理方式、主要优缺点等方面进行了分析。然后针对一般波形,本文对雷达通信一体化系统的性能边界的相关工作进行了综述,并通过仿真说明了雷达和通信性能的折中。最后对本文进行了总结,并对雷达通信一体化共用波形面临的挑战和未来的研究方向进行了展望。
本文后续章节使用以下符号定义:粗体小写字母用于表示向量;粗体大写字母用于表示矩阵;IM表示维度为M ×M的单位矩阵;[A]i,j表示矩阵A的第i行、第j列的元素;|a|表示标量a的模;A†表示矩阵A的伪逆;AT表示矩阵A的转置;AH表示矩阵A的共轭转置;det(A)表示矩阵A的行列式;tr(A)表示矩阵A的迹;||s||表示向量s的l2范数;||A||F表示矩阵A的Frobenius范数;⎿·」表示下取整函数;R表示实数集合;C表示复数集合(;对于)非负整数M和N,假设M ≥N,定义符号
2 一体化共用波形
本节对现有的雷达通信一体化共用波形进行综述。总体而言,现有一体化共用波形可以分为3类:基于通信波形的共用波形、基于雷达波形的共用波形,以及基于联合设计的共用波形。为了统一后文的描述,本文考虑的一体化系统以及应用场景如图1所示。在该系统中有一个共用波形发射机、一个雷达接收机和若干通信接收机。通信接收机位于远方,共用波形发射机和雷达接收机位于一个设备上。共用波形发射机和雷达接收机可以通过时分双工或者收发全双工使用相同的天线,也可以使用收发分置的天线。共用波形发射机的发射波形将照射到目标并返回雷达接收机,或者经过通信信道由通信接收机接收。假设一体化共用波形发射机有LT根发射天线,雷达接收机有根接收天线。为了方便起见,考虑多用户通信时,假设通信接收端使用单天线接收。下面对每一类共用波形进行综述,包括基本原理、具体类型、信号处理方式、性能分析等。
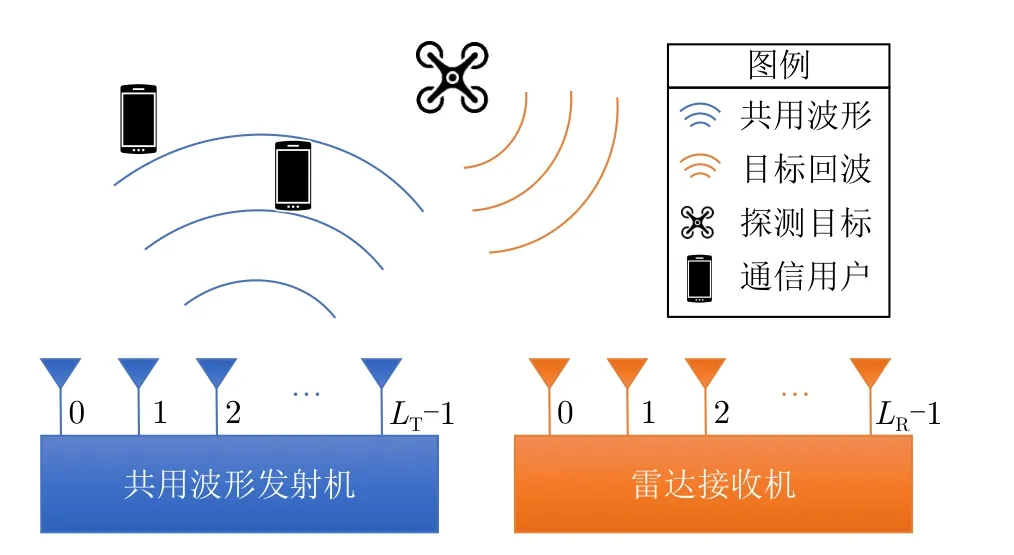
图1 雷达通信一体化系统模型和场景的图示Fig.1 An illustration of the system model and the scenario of joint radar and communication systems
2.1 基于通信波形
一种常见的共用波形设计方式是利用传统通信波形进行雷达探测。虽然可以通过多种通信波形以及调制方式实现雷达通信一体化系统的设计,本节针对几种典型通信波形在一体化系统方面的研究进行综述。具体来说本文首先对基于扩展频谱技术的共用波形研究进行了综述,然后对基于正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)波形的共用波形的相关工作进行了介绍,最后对利用现有通信标准进行一体化设计的相关研究进行了讨论。
2.1.1 基于扩展频谱技术
扩展频谱技术一般通过直接序列扩频或者跳频的方式实现发射波形频谱的展宽。在传统通信领域中,扩展频谱技术广泛用于抗干扰、保密通信等应用中,并可以通过使用不同的扩频序列实现多址接入。文献[26]对基于直接序列扩频技术的车载雷达通信一体化系统进行了研究。针对多用户之间存在的干扰,文献[27]通过自适应功率控制和干扰消除技术降低了用户之间的干扰。由于扩频序列的自相关峰值与旁瓣的比值随着序列长度的增加而下降[28],因此对雷达应用期望序列具有足够的长度。但是对于通信来说,由于通信符号调制在整个扩频序列上,因此导致了通信速率的下降。针对雷达和通信之间对序列长度的不同要求,文献[29]利用通信符号和外层序列来控制内层短序列的级联实现了长码,在一定程度上缓解了通信和雷达对码长要求的矛盾。
基于扩展频谱的优点体现在两点:首先,扩频序列恒模的特点适合发射功率较高的雷达应用;另外可以通过选择不同的扩频序列很容易实现多个系统的共存。通过使用不同的序列实现多用户一体化波形具有以下缺点:首先,波形自相关性质的不理想会限制雷达的动态距离范围,即最大探测距离和最小探测距离之间的比值。另外,利用扩展频谱波形的回波恢复运动目标相比传统雷达波形需要更高的计算复杂度[30]。最后当雷达需要高距离分辨力时,对宽带扩频波形进行接收需要高速模数转换器进行采样,导致了设备成本和硬件复杂度的增加。
2.1.2 基于OFDM波形
由于具有频谱效率高、能够对抗码间干扰等优点[31],OFDM波形在传统通信领域得到了广泛应用。在基于通信波形的一体化设计中,OFDM波形受到了很多关注。文献[32]最早对利用OFDM波形进行探测的方法进行了研究。与单纯利用OFDM波形进行探测不同,在一体化设计中子载波上仍然需要调制通信符号以携带通信信息。由于OFDM子载波上调制的符号随着通信信息的变化,雷达处理的性能会受到通信信息的影响。当对近距离目标进行探测时,文献[28,33]通过发射连续OFDM波形实现雷达通信一体化设计,并且通过在接收端将每个子载波的接收信号除以对应的发射符号来消除对通信数据的依赖,然后通过在载波维度和符号维度做二维离散傅里叶变换(Discrete Fourier Transform,DFT)分别得到每个目标的距离和速度。为了增大探测距离,文献[34]以脉冲形式进行发射,并通过在波形脉宽内发射多个OFDM符号来提高通信速率。
一些文献对发射波形的参数设计进行了研究。文献[35]根据最大不模糊距离和不模糊速度设计了子载波的间隔。当发射总功率恒定时,可以按照不同的性能指标对不同子载波的发射功率进行优化来提高性能。文献[36,37]以通信信道容量以及雷达目标回波和目标冲击响应之间的互信息为优化指标对子载波发射功率的分配进行了建模和优化。文献[38]将雷达的目标检测概率和通信信道容量作为性能指标对发射功率的分配进行了设计。文献[39]以目标参数估计的克拉默-拉奥界(Cramér-Rao Lower Bound,CRLB)和通信信道容量为衡量指标来对子载波的功率分配进行了优化。为了提高通信速率和雷达的角度分辨力,可以通过在每个发射天线发射不同的子载波从而将OFDM与实现多输入多输出(Multiple-Input Multiple-Output,MIMO)结合。一些文献对如何在天线阵元间划分子载波进行了研究,比如等间隔子载波划分[40,41]、不等间隔子载波划分[42]和随机分配[43]。由于每个发射天线的发射波形只使用了一部分子载波,直接对波形进行时域脉冲压缩会导致距离分辨力的下降。文献[41]通过对时间和空间的联合处理同时实现了距离与角度的高分辨。为了进一步提高探测的距离和方位分辨力,文献[44]首先通过滑窗降低不同目标的回波的相关性,然后利用处理以后的信号在频率和脉冲维度的旋转不变性提出了一种自配对的超分辨算法。当雷达具有高距离分辨力的要求时,需要发射宽带波形。在这种情况下使用OFDM波形进行探测需要使用昂贵的发射和接收硬件,可以通过发射步进频波形的方式降低对硬件的要求[45]。另外由于OFDM波形存在峰均比高的缺点,在需要高功率发射的雷达应用中功率效率低。文献[46,47]研究了通过加权来控制波形的最大峰均比,但是会影响通信符号的调制。
2.1.3 基于通信标准
另一种基于通信波形的共用波形利用当前通信标准中的导频进行探测。在这种波形设计中,通信功能没有受影响,雷达功能是附加的。文献中常见的通信标准包括IEEE 802.11p[19]或IEEE 802.11ad[20,21,48–50]。IEEE 802.11p标准在5.9 GHz频段运行,使用OFDM波形[19],可以用于短距离车间通信以保证安全驾驶。IEEE 802.11ad是工作在60 GHz的短距离毫米波通信标准。因为毫米波频段具有更高的带宽,因此802.11ad通信标准支持更高的通信速率,并可以为雷达提供更高的距离分辨力。为了避免通信数据对雷达探测造成影响,文献[20,21,48]提出只利用通信导频进行雷达探测。为了优化导频对雷达探测的性能,文献[50]研究了适合雷达探测的导频设计。毫米波通信使用高度定向的波束,一旦建立了通信数据链,雷达只能可靠地探测位于指定波束方向的目标。为了提高雷达的波束覆盖范围,文献[49]提出通过随机动态选择部分发射天线来增加旁瓣的幅度从而扩展覆盖区域。基于现有通信标准的一体化波形设计的好处是这些方法在实现雷达功能的同时,能够避免对通信的影响。由于只使用了一部分导频进行探测,影响了探测波形的功率效率。对于一些功率受限的系统,限制了雷达的探测范围。
总结以上,基于通信波形的一体化共用波形,特别是基于OFDM的共用波形,可以利用传统通信波形实现探测。由于OFDM波形在通信领域具有广泛的应用,因此这种波形在一体化波形设计中得到了更多关注。为了将OFDM波形应用于实际场景中,需要探索如何降低发射和接收宽带OFDM波形的成本,以及如何在保证通信速率和雷达性能的条件下降低峰均比的有效方法。
2.2 基于雷达波形
除了利用传统通信波形进行一体化波形设计外,还可以将通信信息嵌入雷达发射波形来设计共用波形。基于雷达波形的共用波形可以分为两类:第一是对雷达波形进行改造以携带通信信息;第二是利用索引调制来控制雷达波形参数的改变以携带通信信息。
2.2.1 对雷达波形进行修改
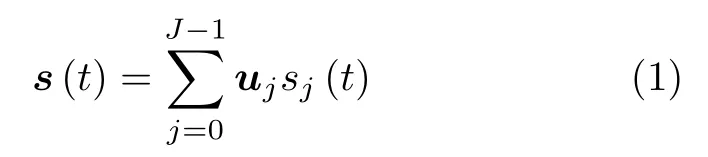
将通信信息嵌入雷达波形的一种方法是修改传统的雷达波形,比如利用最小频移键控[51](Minimum Shift Keying,MSK)或者连续相位调制[52,53](Continue Phase Modulation,CPM)修改线性调频波形的相位,或者改变线性调频波形的调频斜率[54,55]。这些方案的优点是对传统雷达波形的改造保留了雷达波形的某些优势,比如波形恒模等特点。但是由于通信速率和脉冲重复频率成正比,通信速率受限于脉冲重复周期。因为脉冲重复周期和雷达的最大无模糊距离成正比,减小脉冲重复周期虽然可以提高通信速率,但是会减小最大无模糊距离。文献[56]提出了一种利用随机相位编码解距离模糊的方法,可以缩短脉冲重复周期,从而提高通信速率。另外,还可以利用一组正交波通过波束成形来提高通信速率。假设J个正交波形同时从天线阵列发出。利用向量对发射波形进行波束成形,发射信号可以表示为
在通信接收端,接收信号可以表示为

其中,gc和w(c)(t) 为信道响应和加性噪声。在接收端利用不同的正交波形与接收信号进行匹配滤波可以得到接收信号

其中

2.2.2 基于索引调制
索引调制是一种新兴的通信技术。由于索引调制具有较高的能量效率和频谱效率,近年来受到了广泛关注[59]。除了利用传统的幅度相位调制来携带信息,索引调制可以将信息嵌入特定的波形参数之中,比如激活天线的选择方式[60]、发射载波的选择方式[61]等。这些波形参数对于雷达来说也是很重要的,因此可以利用索引调制来控制雷达波形参数的变化以传递信息。在基于索引调制的雷达共用波形中,可以调制的索引包括载波频率、发射时隙、天线选择以及正交波形等。因此可以利用索引调制控制雷达波形的参数,将通信信息嵌入波形的发射参数变化之中。目前基于索引调制的一体化波形设计主要集中于MIMO雷达和频率捷变雷达,下面对这两类波形的相关研究进行介绍。
(1) 索引调制和MIMO雷达的结合:文献[62]利用索引调制来控制MIMO雷达正交波形的排列方式。对于一个拥有LT个发射天线的MIMO雷达,一共有LT!种波形在天线上的排列方式。因此,每个雷达脉冲重复周期一共可以传输⎿log2LT!」个通信比特。文献[63]提出利用稀疏发射阵列的MIMO结构,并将通信信息嵌入发射天线的选择以及正交波形的排列之中。在每个脉冲发射时,从LT个天线中选出K个天线用于发射。向量s(t)=[s0(t)s1(t) …sK–1(t)]T由K个正交信号组成。用大小为LT×1的向量表示第m个脉冲的发射信号。向量由零元素和s(t)组成,并且可以表示为(m)s(t),其中Λ(m)为一个大小是K×K的置换矩阵(permutation matrix),ΩM(m)∈是描述天线选择的矩阵。通信接收信号表示为

其中,gc是大小为LT×1的信道向量,w(c)(m,t)是加性噪声。经过和发射信号进行匹配滤波以后,可以得到接收向量
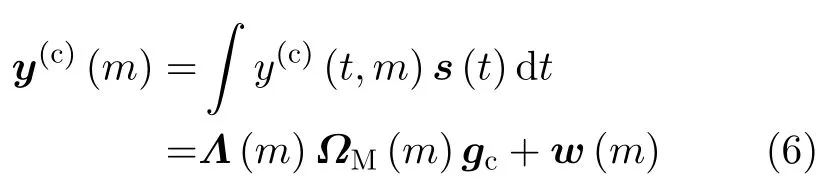
通信信息可以嵌入天线的选择以及正交波形的排列,即矩阵Λ(m)ΩM(m)的实现方式。通过K个正交波形的排列和发射天线的选择,每个脉冲可以传输个信息比特。
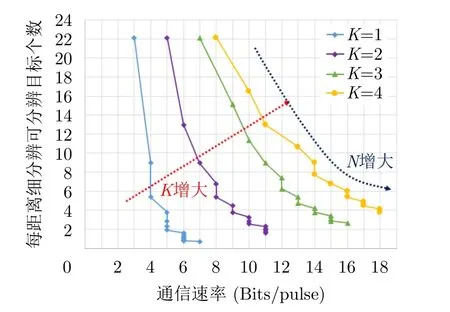
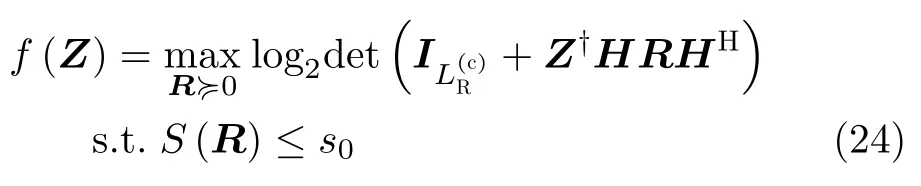
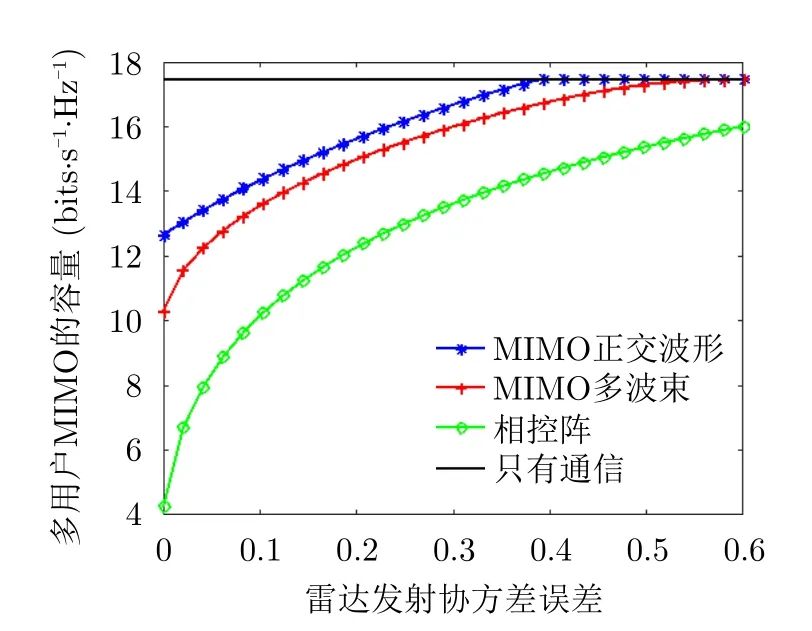
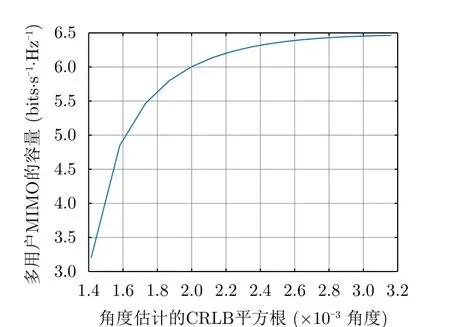
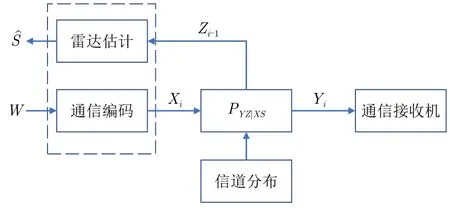
(2) 索引调制与频率捷变雷达的结合:频率捷变雷达可以用于干扰环境,并能够通过合成带宽实现距离高分辨力。频率捷变雷达的载波频率在脉冲之间随机变化。这种发射方式可以和索引调制结合,即利用索引调制来控制雷达载波频率的变化从而携带通信信息。文献[64]提出通过载波频率的排列来携带通信信息。对于拥有N个载波的发射载波集合,一共有N!种载波排列方式可以用于嵌入通信信息。文献[23,25]提出了一种多载波频率捷变系统。与传统的频率捷变雷达不同,该系统可以同时从多个天线阵元发射不同频率的载波。考虑一个具有LT个发射天线的一体化系统,以及具有N个子载波的发射载波集合F。通信信息可以通过如下方式嵌入发射波形的参数:在第m个发射脉冲周期,首先从载波集合F中选出K 其中,rect(·)是在区间[0,1]取值为1,在其余位置取值为 0的窗函数;θ为波束指向的方向;u(θ,fm,k)为对载频为fm,k的第k个发射载波进行波束成形的导引矢量;ΩF(m,k)是决定哪个天线用于发射载波fm,k的天线选择矩阵。通信信息可以通过发射天线的组合方式以及载频选择的方式来携带。 相关研究还对基于索引调制的共用波形的性能进行了分析。文献[25]分析了索引调制的互信息的下界,并表明在中低信噪比时索引调制的互信息与单天线的信道容量相当。雷达性能的分析可以通过分析模糊函数或者从解方程的角度分析恢复求解性能。模糊函数可以用来表征波形的分辨能力以及对抗杂波的能力。文献[18,65]对天线随机变化的波形的模糊函数进行了分析,文献[22,66]对载频-天线随机变化的波形的模糊函数进行了分析。当把雷达对目标的恢复建立成方程求解问题时,可以通过方程的恢复性能来说明雷达性能。文献[67]将目标恢复建立成稀疏恢复问题,并通过对观测矩阵互相干性的分析得出了目标恢复个数的下界。文献[22]通过相变理论分析了目标恢复的求解问题,得出了利用载波-天线维度的索引调制来控制雷达波形时,波形参数变化与最小可恢复目标个数的准确关系。利用该关系可以得出通信速率与雷达可恢复目标的性能折中曲线随波形参数的变化。 图2描述了文献[22]提出的一体化波形参数变化与雷达性能和通信性能的关系。图2的纵轴为每个距离细分辨能够准确恢复的目标个数,横轴为每脉冲能够传输的通信比特个数。在该图中子载波个数N=16,发射阵元个数LT=4,每个子载波上调制的相移键控符号的阶数为2。从图2可以看出,当其他波形参数不变时,增加划分的子载波个数虽然会获得通信速率的提升,但是会导致雷达可恢复目标个数的下降。这是因为增加子载波能够增加频率索引调制的组合个数,但是会导致雷达发射波形在频域更加稀疏。而在其他参数保持不变时,增加激活阵元个数K会将雷达通信性能折中曲线向性能更优的方向扩展。这是因为对于图中的参数设置,虽然随着K增加通过空间索引调制携带的比特个数减少,但是通过相位调制和频率索引调制携带比特个数的增加更多,所以通信速率得到提升。而雷达可观测目标个数的提高是因为发射波形在频率和天线维度获得了更多观测。 图2 文献[22]提出方案的雷达可恢复目标个数和通信速率与波形参数的关系Fig.2 The number of targets that can be recovered by radar and the communication rate versus different waveform parameters in the scheme proposed in Ref.[22] 通过上述分析可以得出,基于雷达波形的共用波形的优点为它们可以在尽可能减少对雷达功能影响的条件下提供通信能力。比如利用索引调制来控制频率捷变雷达的载频选择时,其雷达性能与载波发射随机变化相当[23]。特别地,由于频率捷变波形每次发射时使用了窄带波形,可以降低雷达接收的采样速率从而降低硬件复杂度和成本。然而基于雷达波形的一体化波形的通信速率相对有限,并且需要专门针对雷达波形进行通信解码,提高了通信接收机的复杂度。因此基于共用雷达波形的一体化设计更适合作为现有通信体制(如蜂窝通信、车载通信)之外的补充通信方式,而不能替代传统通信方式。 之前介绍的共用波形都是基于传统的雷达或通信信号。传统的发射波形在通信或者雷达方面都有性能保证,并能够与现有的设备相适应。然而由于这些波形并不是专门为雷达通信一体化应用设计的,从而导致了这些波形的雷达或者通信性能下降。本节将介绍基于联合设计的专用波形,这种波形结合了雷达和通信的需求与约束来进行波形设计,提高了一体化系统的性能。 基于联合设计的专用波形并不基于传统的雷达/通信信号,而是根据一体化系统中雷达和通信的目标与约束来设计[68–73]。在专用波形中发射信号用大小为LT×J的矩阵X来表示,其中J是波形时间采样的点数。考虑与LU个用户进行通信,每个用户使用单天线进行接收。通信接收到的信号可以表示为 方向θ对应的波束响应为 其中,H是大小为LU×LT的信道矩阵,U为联合波束形成矩阵,W(c)为加性噪声。利用式(8)和式(9)可以设计发射波形X和与编码矩阵U以满足雷达或者通信的性能要求。文献[69]通过设计X使得雷达目标方向和通信方向收到的波形等于预设波形,但是由于没有考虑对其他方向波形的优化,可能导致目标方向之外有较高的旁瓣。文献[70,72]通过对所有方向的雷达波束方向图进行约束克服了该问题。具体来说,文献[70]设置X为通信波形并通过优化预编码矩阵U来达到目标波束方向图,并满足每个下行通信接收端的信干噪比约束。文献[72]在雷达约束下对发射波形X进行设计,以最小化多用户之间的干扰,常见的雷达约束包括波束方向图、波形恒模约束以及与某个确定波形之间的差异,CRLB[71]等。文献[68,73]将发射波形分为雷达波形和通信波形两部分,通过分别优化雷达和通信波形的预编码矩阵以满足雷达与通信的性能约束,比如约束通信用户端的最小信干噪比并最小化发射波形协方差与目标协方差之间的差距[68],或者给定发射波形协方差并最大化通信用户端的信干噪比[73]。 专为一体化设计的双功能波形不受常规波形限制,可以通过联合设计实现雷达和通信性能的折中。尽管如此,专用优化一体化波形在应用中依然受到限制,比如专用波形的生成涉及复杂优化问题的求解并依赖通信信道状态信息。在一些快速运动的场景以及硬件性能受约束的场景应用还具有挑战。 本节将现有的一体化共用波形设计方式分为3类,即基于通信波形、基于雷达波形和基于联合设计。对于每一类共用波形设计方法,本文都对其基本原理以及优缺点进行了介绍。由于这些一体化波形在在雷达性能、通信速率、硬件复杂度等方面都具有差异,下面结合通信和雷达性能的折中对各种波形进行简要评述。 基于通信波形的方法,特别是基于OFDM的共用波形,通过使用传统的通信信号来支持高速传输。具体来说,OFDM虽然具有良好的雷达模糊函数,但是在需要使用宽带应用的场景中,发射和接收OFDM波形都需要昂贵的硬件设备。此外,OFDM波形的非恒模特性导致了发射功率效率的下降。基于现有通信标准的一体化波形是使用通信波形进行雷达探测的特殊情况。这种波形可以在有限的雷达探测性能下保证通信的传输能力,因此可以作为一种附加的传感设备,而不应该取代现有的专用雷达。 基于雷达波形的方案,特别是基于索引调制的一体化系统,可以自然地集成到当前的雷达系统中,并对雷达造成很小的性能影响。尽管如此,由于基于雷达波形的共用波形通信速率受限,并且不能使用现有的通信接收机进行接收和处理。这类一体化波形还是无法完全取代现有的通信系统,只能作为补充。在商用移动网络覆盖不到的场景或者自组织网络中,可以利用这种一体化波形在实现探测的同时进行消息的传输。 基于联合设计的波形根据每个功能的目标和约束来设计专用波形。这种波形有可能在雷达和通信性能之间实现任何给定的折衷。尽管如此,作为一个相对较新的研究领域,这类波形设计在计算复杂度、硬件成本等方面还具有一定的挑战。除此之外由于优化需要的先验信息在高速动态变化的场景下是不容易获取的。 通过对现有共用波形技术的分析,可以得出每种一体化方法都有其优点和缺点,没有一种一体化方法可以适用于所有的应用场景。一体化波形设计的目标是针对某种应用场景,在一定的工程约束下利用给定的时间、频谱、天线和功率资源以满足一定的通信和雷达的性能要求。明确每种波形的特点以及适用场景,可以为一体化系统的实际设计提供指导。 上文讨论的雷达通信一体化性能都取决于具体的波形体制和调制方式,虽然在一定程度上展示了雷达和通信的性能折中,但还是缺乏普适性。实际上,有些研究也开始考虑一般化的一体化波形所能达到的通信雷达折中的理论性能边界。因为信道容量可以很好地表示通信性能边界,所以现有工作主要考虑在雷达性能约束下,计算通信的容量。根据对雷达性能描述方法的不同,现有工作可以分为两类:第一类考虑传统的雷达性能求解通信的容量,常见的雷达约束包括模糊函数、发射波束和估计精度等;另一类试图在信息论的框架下对雷达的性能进行度量,进而建立起一体化性能边界分析的统一框架。 3.1.1 单天线一体化系统 文献[74]针对单天线一体化系统,给出了雷达约束下的通信容量在高信噪比下的近似表达式。假设信号带宽为Bw,时宽为T。把椭球波函数作为信号基底,发射复信号可以用G=1+⎿BwT」维的向量s表示。同时为了保证雷达性能,要求功率归一化的发射信号满足L个不等式约束: 其中,可导实函数Fl(·)表示某种雷达性能指标,cl为某种雷达性能约束的下限。 在加性高斯白噪声信道下,给定噪声功率ε2,并假设发射信号的平均功率约束满足2GP0,其中P0定义为每个维度信号的平均功率。定义集合S={s ∈CG|||s||=1},以及S的子集 当信噪比P0/ε2远大于1时,文献[74]给出通信容量的近似表达式为 其中,V2G−1(·)表示维度为2G −1的流形的体积。 利用上述结果,文献[74]进一步考虑了在某些具体雷达约束下的通信容量。给定一个向量w,并利用w在接收端进行非匹配滤波,即对w和雷达接收信号做互相关操作。非匹配滤波的性能可以通过非匹配滤波的信噪比损失(Filter Loss,FL)以及输出的峰值旁瓣比(Peak-to-SideLobe Ratio,PSLR)衡量。用函数FL(w,s)表示信号非匹配滤波带来的信噪比损失FL(w,s),并用函数PSLR(w,s)表示输出距离像的峰值旁瓣比。对于给定的发射信号s,雷达通过设计w,实现在给定的信噪比损失下,最大化峰值旁瓣比。上述描述对应的雷达性能函数为 雷达信号的约束集合为Ω={s ∈S|F1(s)≥c1}。 计算通信容量的关键在于计算集合Ω的体积。文献[74]首先讨论了F1(s)可以进行高效计算。然后通过蒙塔卡罗实验在集合S中产生大量样本s,并通过计算F1(s)来判断s是否位于集合Ω内,进而得到集合Ω和集合S的体积的比。最后将集合Ω和集合S的体积的比值代入式(12)从而求出通信容量。 3.1.2 MIMO一体化系统 对于MIMO雷达通信一体化系统,文献[75]给出了在雷达空域处理性能约束下的通信容量的计算方法。为了简单起见,文献[75]忽略了雷达信号时域匹配滤波的旁瓣问题,仅考虑了雷达在空域的性能。用一个LT维的向量x(t)表示发射波形,其中LT是发射天线个数。发射波形x(t)的协方差矩阵R=E(x(t)xH(t))需要满足tr(R)=Pw,其中Pw表示发射功率。相关分析表明,雷达性能和通信容量都取决于协方差矩阵R[75,76]。因此,雷达性能约束下的通信容量计算可以表示成关于R的优化问题。下面分别给出雷达性能和通信容量的表达式,进而给出雷达和通信的折中关系。 (1) MIMO通信容量 对于通信来说,常用的性能指标是信道容量。考虑一个接收天线个数为的MIMO通信系统,并用的矩阵H表示信道,信道输出可以表示为 其中,w(c)(t)是加性高斯白噪声,w(c)(t)∼CN上面的信道模型可以同时用来描述点对点MIMO系统和多用户MIMO系统。在点对点MIMO系统中只存在一个通信用户,其接收机有个接收天线。而在多用户MIMO系统中存在个用户,每个用户只有一根接收天线。对于给定的发射协方差R,点对点MIMO的信道容量为 多用户MIMO的信道容量为[75] 其中,Z的物理含义是通信接收噪声的协方差。点对点MIMO的信道容量是有解析表达式的,而多用户MIMO的信道容量的表达式中包含一个关于半正定矩阵Z的优化。 (2) MIMO雷达性能 MIMO雷达可以选择多种性能指标。从发射波束成形的角度来看,雷达的发射波束方向图可以表示为[77] 其中,a(θ)表示方位θ对应的发射导引矢量。MIMO雷达实际的发射波束方向图和理想的波束方向图BPd(θ)之间的误差可以作为优化目标,并表示为[78] 从目标参数估计的角度来说,雷达也可以把参数估计的CRLB作为优化目标。如果一个距离分辨单元内有P个目标,目标的方位和回波幅度分别为和,那么MIMO雷达的接收信号可以表示为 其中,b(·)表示接收导引矢量,w(r)(t)表示高斯白噪声。在MIMO雷达的观测模型中,待估计参数包括θp,ℜ(αp),ℑ(αp),总共有 3P个。用一个3P ×3P的半正定矩阵F来表示参数估计的Fisher信息矩阵。MIMO雷达的相关研究表明F由发射协方差R决定,并且可以表示为关于R的线性函数[76]。通过设计R,可以优化各个待估计参数的CRLB的加权和 来评价雷达的性能指标。可以说明,上面给出的3种MIMO雷达性能指标都是关于R的凸函数。在后面的讨论中,本文用一个一般化的函数S(R)来评价雷达的性能,S(R)的值越小,意味着雷达的性能越好。 (3) 一体化的性能边界 上文分别讨论了雷达和通信的性能指标。为了得到一体化系统的性能边界,可在雷达性能约束下去优化通信的信道容量,对应的优化问题可以表示为关于R的优化: 对于点对点MIMO系统,通信目标函数C(R)=C1(R)是关于R的凹函数,因此上述优化问题可以直接用凸优化工具箱求解。而对于多用户通信系统,通信目标函数C(R)=C2(R)中包含了关于Z的优化,处理起来较为困难。为了进行求解,可先把上述优化问题表示为关于Z和R的鞍点优化问题 其中的约束都是凸的,目标函数是关于Z的凸函数,同时又是关于R的凹函数。这种类型的优化虽然一般无法直接调用凸优化工具箱求解,但也可以有效求解。考虑到其中关于Z的约束较为简单,我们可以把鞍点优化问题中关于R的最大化的值表示为一个关于Z的凸函数 接下来就可以把鞍点问题表示为关于Z的凸优化: 其中,f(Z)虽然没有解析表达式,但是可以通过凸优化工具包进行计算。因为优化问题的约束比较简单,可以直接利用梯度投影法对Z进行迭代,迭代过程可以表示为 (e)给ℓ的值加1,回到步骤(b)继续迭代当Z的值收敛以后,迭代可以终止,步长γ(ℓ)可以通过回溯直线搜索确定。 对于LT=10,=4,Pw=10,图3展示了多用户MIMO通信的信道容量和雷达性能折中曲线,其中信道服从标准复高斯分布,雷达的性能度量选用发射协方差误差S3(R)。这里雷达的性能和最优协方差Ro有关,图3对比了3种不同的Ro,分别对应MIMO雷达发射正交波形、MIMO雷达多波束和相控阵几种不同的雷达体制。可以看出,相比只有通信的情形,一体化系统中的雷达约束会带来一定的通信速率损失。在瑞利衰落信道下,MIMO雷达发射正交波形对于多用户MIMO的容量是最优的,MIMO多波束次之,相控阵模式下的通信容量最低。通过该仿真结果可以得出,在发射不同波形以及不同雷达性能约束下,会对通信性能产生不同的影响。应用本节的性能边界理论,可以对根据实际应用需求对共用波形进行设计,以实现雷达和通信性能的折中。 图3 多用户MIMO通信的信道容量和雷达的协方差误差S3(R)的关系Fig.3 The relationship between the channel capacity of multi-user MIMO and the bias of the radar covariance S3(R) 图4 多用户MIMO通信的信道容量和雷达目标角度估计的CRLB的关系Fig.4 The relationship between the channel capacity of multi-user MIMO communication and the CRLB of the angle estimate of radar targets 除了估计精度、峰值旁瓣比等传统的雷达性能度量,也有工作试图通过信息论对雷达性能进行度量,进而给出一体化系统的性能边界。在信息论的框架下,通信性能可以用信道输入和输出的互信息来衡量。为了衡量雷达性能,文献[79]考虑通信接收机也是雷达目标的场景,把雷达回波等价为来自通信接收机的广义反馈,进而雷达的任务就是要根据反馈信号估计信道状态。图5给出了对应的系统概念图,其中雷达和通信共用发射机,雷达在单基地模式下工作。对其中各个模块的具体解释如下: (1)W表示通信信息,经过编码之后得到发射通信符号Xi,其中i=1,2,...; (2) 经过信道Si之后,通信接收机收到信号Yi,其中Ni为加性高斯白噪声; (3) 通信接收机将接收信号反馈给发射机,发射机收到反馈Zi−1,并且根据反馈估计出信道。 在图5中,符号传输和广义反馈这两个过程可以用一般化的条件概率PYZ|XS进行描述。具体来说,文献[79]考虑了点对点通信,并假设信道为加性高斯噪声信道。在这些条件下,信道的输出为 图5 基于信息论的通信雷达一体化系统示意图Fig.5 An illustration of the joint radar and communication system based on information theory 其中,信道Si服从高斯分布。为了简单起见,文献[79]考虑发射机收到的广义反馈Zi=Yi的情况。显然,这一假设和实际雷达的信号模型并不符合。尽管如此,文献[79]的理论推导还是针对一般意义下的PYZ|XS展开的,因此还是有可能用于实际雷达的性能分析。 文献[79]用信道估计失真的期望来衡量估计的精度。信道估计失真的期望可以表示为 其中,d(·)是一个给定的失真函数。为了描述一体化系统的性能边界,可以在给定雷达估计失真的约束下,优化通信的互信息。对应的优化问题可以表示为 其中,b(X)表示发射符号X的资源消耗,B表示平均资源消耗的上限。在式(28)中,优化目标是发射符号X的分布。基于交替优化的思想,文献[79]提出了一种迭代算法求解最优的概率密度函数。对不同的失真D求解上述优化问题,可以得到雷达估计失真和通信容量折中的性能边界。文献[79]在信道Si服从高斯分布的条件下,给出了平均雷达估计失真和通信容量的折中曲线,并且和通信雷达时分复用的结果进行对比,说明了一体化设计的优势。 在图5所示系统模型的基础上,文献[80]进一步考虑了多址接入信道下的雷达通信性能边界。文献[80]考虑了两个一体化发射机同时向一个通信接收机传输符号,并且接收广义反馈进行雷达信道估计。与文献[79]类似,文献[80]建立了两路通信速率和与雷达估计失真之间的折中关系,并且通过数值结果表明当失真较小时,得到的雷达通信性能折中边界和理论外边界很接近。 雷达通信一体化设计可以在性能、尺寸、成本、功耗和电磁兼容性方面带来潜在的收益。本文首先对雷达通信一体化共用波形进行了综述,并将现有的共用波形设计方法分为3种类型,即基于通信波形、基于雷达波形和基于联合设计。对每一类波形设计方法的基本原理、适用场景、雷达和通信的性能表现、实现复杂度等进行了介绍。根据各种波形设计方法在雷达性能、通信性能、复杂度和成本等方面的表现,本文的结论是没有一种单一的一体化波形适用于所有场景,明确各种波形特点可以为具体场景下的一体化设计提供指导。然后,在具体波形基础上,本文针对一般波形在雷达性能约束下对通信容量进行了求解,通过分析揭示了不同雷达性能约束对通信容量变化的影响。 尽管对雷达通信一体化设计的研究已经有数十年,但是在该领域还有很多需要探索的研究方向。首先,共用波形对雷达和通信都带来了与单一功能波形不同的挑战,需要针对一体化波形开发对应的雷达和通信检测算法、信道同步和估计算法、雷达杂波抑制算法等。其次,尽管现有工作已经充分说明了雷达通信一体化的必要性和可行性,然而却没有实现雷达和通信在基础理论上的统一。通信的基础是香农信息论框架下随机信源和信道输出的互信息,但是这套理论却无法很好地对雷达检测和参数估计的性能进行解释。是否存在更高层次的基础理论对通信和雷达的设计进行统一,是指导雷达通信一体化研究的重要命题。最后,现有的雷达通信一体化研究主要关注单个一体化平台的信号设计、传输与处理。为了应对日益复杂的环境和需求,多平台协作组网成为未来的重要发展趋势。因此一体化的研究不应局限于单个平台,在大尺度、全空间、全频段意义下的分布式雷达-通信一体化网络,才是一体化设计和分析的最终目标。
2.3 基于联合设计


2.4 讨论
3 一体化系统的性能边界
3.1 雷达性能约束下的通信容量












3.2 基于信息论的雷达通信一体化性能边界



4 总结和展望
猜你喜欢
汽车零部件(2022年7期)2022-08-03
电子技术与软件工程(2022年6期)2022-07-07
中国空间科学技术(2021年1期)2021-03-16
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20
读写算·高年级(2015年6期)2015-06-16
爆笑show(2015年1期)2015-03-26
数学大世界·小学低年级辅导版(2010年10期)2010-11-01
数学大世界·小学低年级辅导版(2010年5期)2010-05-04
现代电子技术(2009年8期)2009-06-25