
城乡建设遥感动态监测关键技术研究及应用
2022-04-27 13:23吴亚文申佩佩
地理空间信息 2022年4期
吴亚文,聂 倩,申佩佩
(1.宁波市阿拉图数字科技有限公司,浙江 宁波 315000;2.宁波市测绘设计研究院,浙江 宁波 315000)
随着地球空间信息学的快速发展,尤其是遥感、地理信息系统等3S技术具有信息获取全面、多尺度、时效性强、成本低等诸多优点[1-3],可以及时掌握城市建设的现状和变化信息等第一手资料,从而为城市规划和建设管理提供不同视角、不同时空的科学论证和决策依据,因此已成为加强城乡规划实施监督、提升稽查执法效能的重要手段。本文以宁波市为例,采用多期高分辨率卫星影像实施城市建设变化监测分析,建立全市“空、天、地”一体化的遥感动态监测技术辅助城乡规划督察技术服务体系,从而为城乡规划督察工作提供稳定和快速反应的技术支撑。
1 研究区概况及数据源
1.1 研究区概况
宁波是我国首批对外开放的沿海港口城市和计划单列市,是一座具有深厚文化底蕴而又充满现代活力的国际化港口城市。宁波地处我国海岸线中段,长江三角洲南翼。东有舟山群岛为天然屏障,北濒杭州湾,西接绍兴市的嵊州、新昌、上虞,南临三门湾,并与台州的三门、天台相连。是长三角五大区域中心之一,也是长三角南翼经济中心和浙江省经济中心之一。目前,宁波印发了促进地理信息发展的实施意见,其中加快发展航空航天遥感技术及应用,培育发展全市全天候新型多源航空航天遥感获取、处理、加工和服务产业的发展作为首要的发展重点。
1.2 数据源及其预处理
本文研究内容数据源以遥感影像为主,通过卫星遥感技术可以得到客观准确的数据。但受到拍摄成本和拍摄条件等因素的限制,需要在遥感数据处理过程中融入较多的其他元素对影像作出参考,且对数据格式、坐标系、时间的统一性提出较高要求,数据快速标准化处理成为要完成的第一步。
1.2.1 数据源
本文研究内容数据源由以下四部分构成:①分辨率为0.8 m的高分二号和北京二号影像;②收集已有(2015年)分辨率为0.5的影像数据(digital orthophoto map,DOM);③收集已有(2015年)数字高程模型(digital elevation model,DEM);④无人机采集影像数据。影像范围宁波市约10 000 km2,同时收集研究区poi、路网数据等辅助完成后续位置确定等工作。
1.2.2 数据预处理
由于收集影像存在不同时相、不同传感器或不同视角的成像条件的差异,图像间会存在相对平移、旋转和尺度等变换,因此需要对影像做几何纠正、影像配准、影像融合、匀光匀色、信息增强等预处理。
1)数据介绍。本次研究主要采用高分二号和北京二号2种数据源进行。高分二号是我国自主研制的首颗空间分辨率优于1 m的民用光学遥感卫星,搭载有2台高分辨率1 m全色、4 m多光谱相机,具有高辐射精度、高定位精度和快速姿态机动能力等特点。北京二号是由三颗高分辨率卫星(0.8 m全色、3.2 m多光谱的光学遥感卫星)组成的民用商业遥感卫星,可提供覆盖全球、空间和时间分辨率俱佳的遥感卫星数据和空间信息产品。
2)技术路线。对本文研究区的遥感影像预处理如图1所示
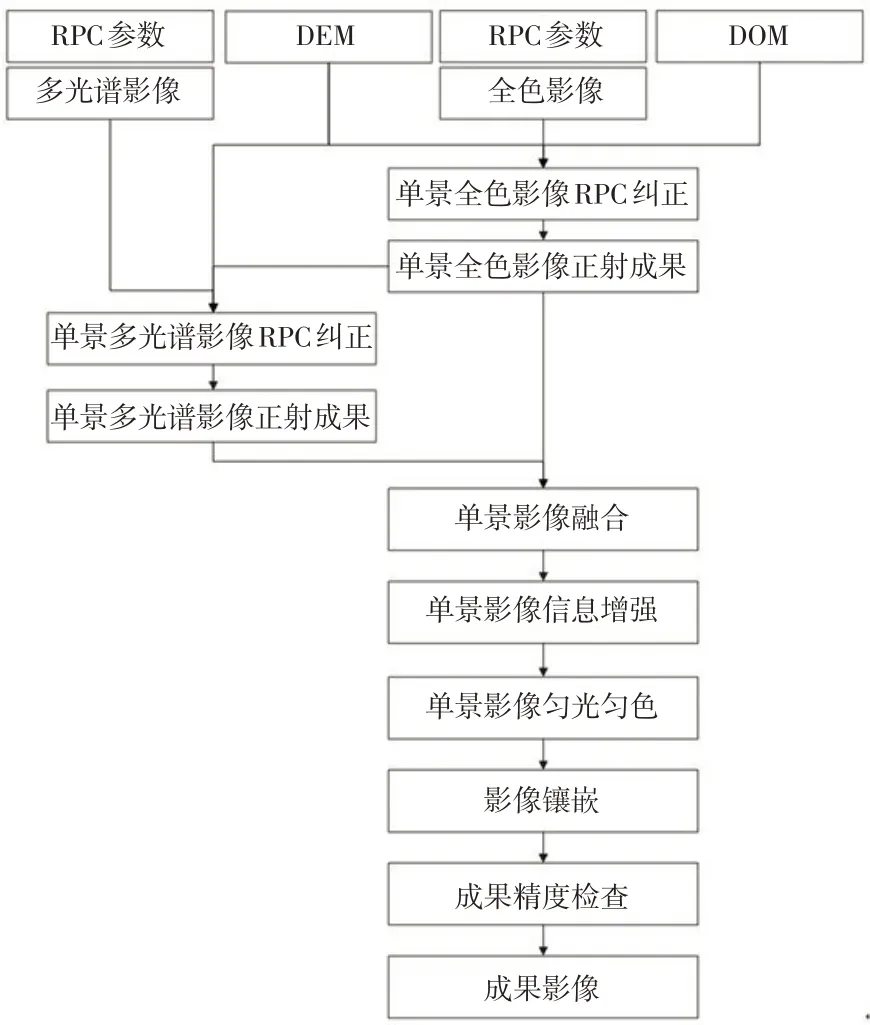
图1 遥感影像预处理流程图
3)有理函数模型。通常情况下,遥感影像无地面控制时的定位精度不能满足应用要求。采用有理函数模型(rational function model,RFM)作为影像数据的几何模型,由于RPC是由卫星参数通过严密几何模型解算得到的,所以卫星原有的系统误差也被代入有理函数系数中,为了保证几何定位的高精度,应在平差过程中采用某些方法来补偿系统误差。如像方平移改正模型、平移变换模型和仿射变换等补偿方案,其实质就是利用影像自带的RPC系数来消除像点的系统误差[4]。
有理函数模型是将像点(r,c)表达为与其相应的地面点空间坐标(X,Y,Z)为自变量的的多项式比值,
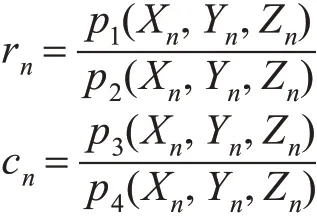
其 中,p1(Xn,Yn,Zn),p2(Xn,Yn,Zn),p3(Xn,Yn,Zn),p4(Xn,Yn,Zn)的表达式为:
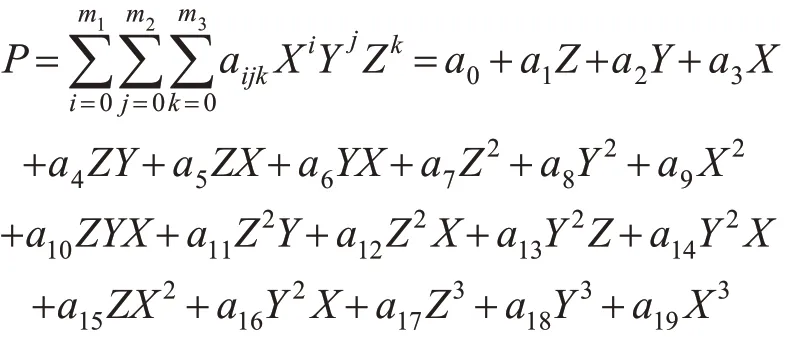
式中,aijk(a0......a19)为有理函数的多项式系数(rational functioncoefficientsRFC)。
2 研究方法
宁波市自2015年以来,逐步开展了利用卫星遥感技术辅助城乡规划督察工作,以高分辨率遥感影像为基础,以无人机航测技术、地理信息技术和移动互联技术为依托,综合遥感监测、督察统筹、分局监管等模式,构建宁波市一站式遥感动态监测技术辅助城乡规划督察技术服务体系(如图2所示),在维护城乡总体规划权威性和严肃性方面取得了明显成效。其关键技术包括研究区遥感影像采集、遥感影像预处理、基于感知哈希算法的遥感影像变化发现、基于层级信息匹配的变化图斑空间化技术、变化图斑快速核查与反馈技术和倾斜实景三维快速建模与取证。
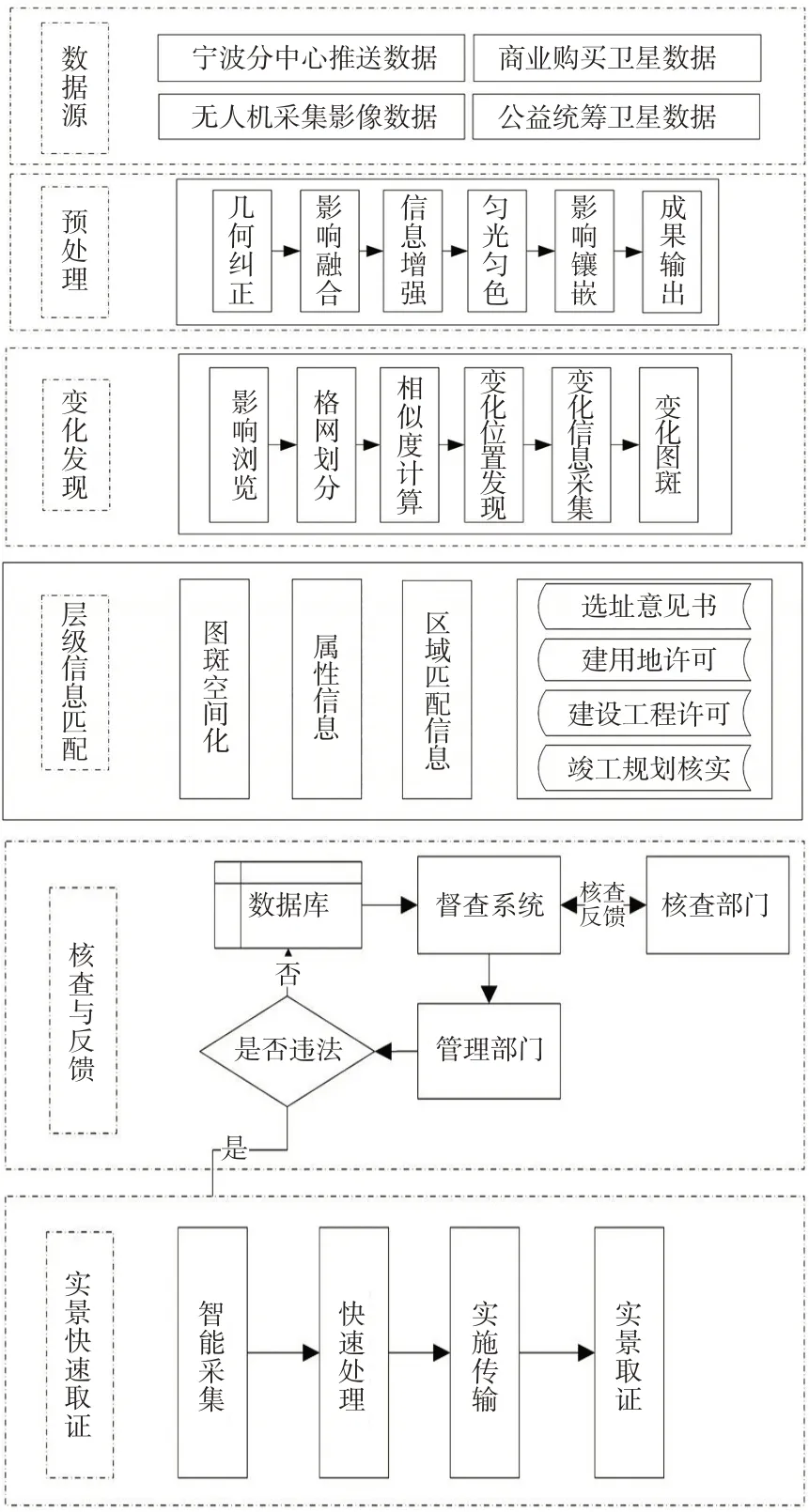
图2 遥感动态监测服务体系流程
3 关键技术
3.1 基于感知哈希算法的遥感影像变化发现
基于感知哈希算法的遥感影像变化发现采用格网将影像划分为不同的区域,由于感知哈希算法大多针对图像全局进行特征提取[5],对影像进行基于信息熵的自适应格网划分,先对影像进行隐形格网划分,将其分割为大小相等的区域;设定相似度阈值,根据阈值范围提取变化图斑;数据编辑后如不满足信息划分需求,将基于局部自适应策略,根据信息熵自适应地对格网单元进行格网加密操作。实现不同时相间遥感影像变化发现与提取(如图3所示)。
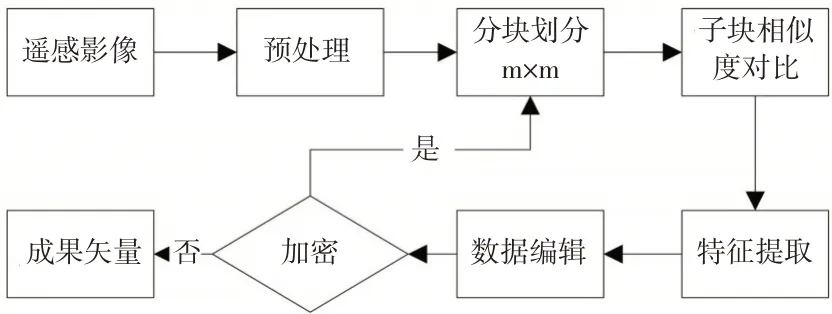
图3 基于感知哈希算法的遥感影像变化发现流程
相较于传统人工对比影像和识别变化位置的方法,存在人工操作干预度高、数据冗余量大等问题。而基于感知哈希算法的遥感影像变化发现在提高运算速度、减少人工操作、减少数据冗余方面都可完成较大程度的提升。针对不同的变化尺度,采用动态格网分割的方式,对影像进行分块对比检测,提取出准确的变化位置(如图4所示)。
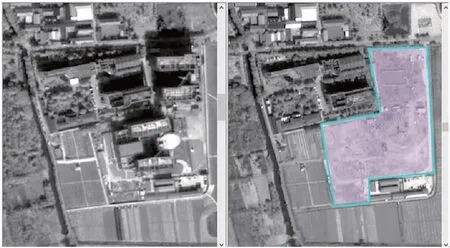
图4 变化发现示意图
3.2 基于层级信息匹配的变化图斑空间化技术
城市建设的规划管理是基于各层级各阶段进行流程化审批与监管,如选址、建设用地许可、初验、建设工程许可、复验、竣工核实等,而变化检测数据与规划审批信息存在地理空间上的一致性,宁波市遥感辅助动态监测以城乡建设项目为索引,通过空间位置关系、对应关系、映射关系等进行检索统一(如图5所示),然后进行智能匹配空间化,使两者的空间位置与属性信息进行高度融合。实现了通过数据库的形式对将核查的图斑空间属性和数据属性进行整合,形成完整的数据体系。
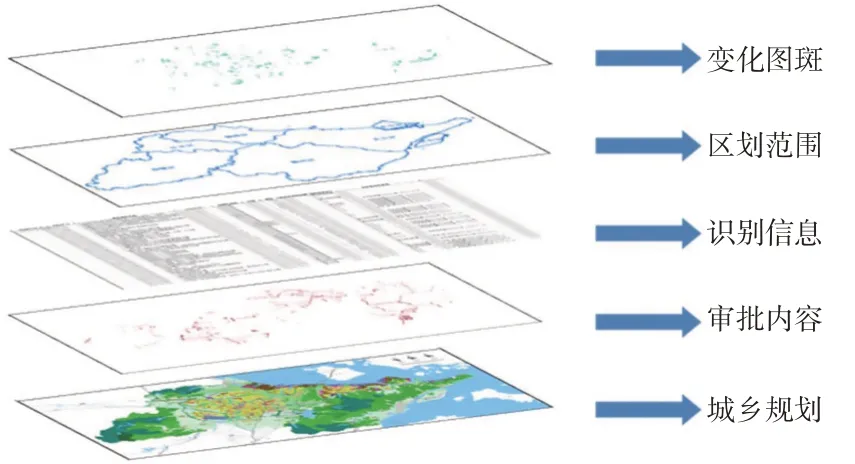
图5 层级匹配示意图
3.3 变化图斑快速核查与反馈技术
由于督察频次逐年递增,变化图斑的数量进一步增加,从而会带来误判数量激增和判读耗时等问题,拖延了督察工作的进度。因此,利用基于感知哈希算法的遥感影像变化情况,可快速发现变化图斑;对发现的变化图斑进行基于层级信息匹配的变化图斑空间化技术,精准地完成变化图斑与高精度地理数据、规划管理数据的匹配。在此基础上完成了变化图斑的预判预查,通过督察系统将预判预查图斑分发至各个核查部门,对变化图斑“定性”,即对图斑相应的审批信息进行确认,并将具有违法性质的建设进行判断甄别。在进一步核查后移交至相关管理部门,对违法建设采取控制、补办、拆迁等相关措施(如图6所示)。
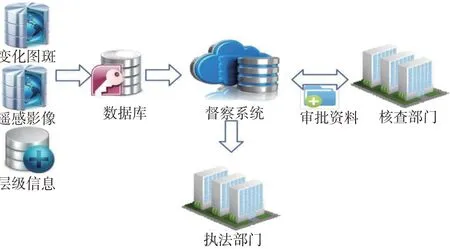
图6 多部门信息化导向图
3.4 倾斜实景三维快速建模与取证
倾斜实景三维模型主要采用基于倾斜摄影测量的三维建模方式进行制作,真实反映测区内建筑、交通、水系、植被、地形地貌等地物主要的特征和结构,通过表面纹理真实反映其表面的颜色、质地、形状和图案等,达到色调协调、自然真实的效果。根据摄影测量原理,对获得的倾斜影像数据进行数据预处理、多视角联合平差、模型构建、三维模型修改、检查等过程,最后进行整理提交。在城市规划督察工作中,可以全面直观地了解到现场情况,对于确切掌握变化图斑的边界、准确位置和实地取证等方面具有参考价值[6-9](如图7所示)。
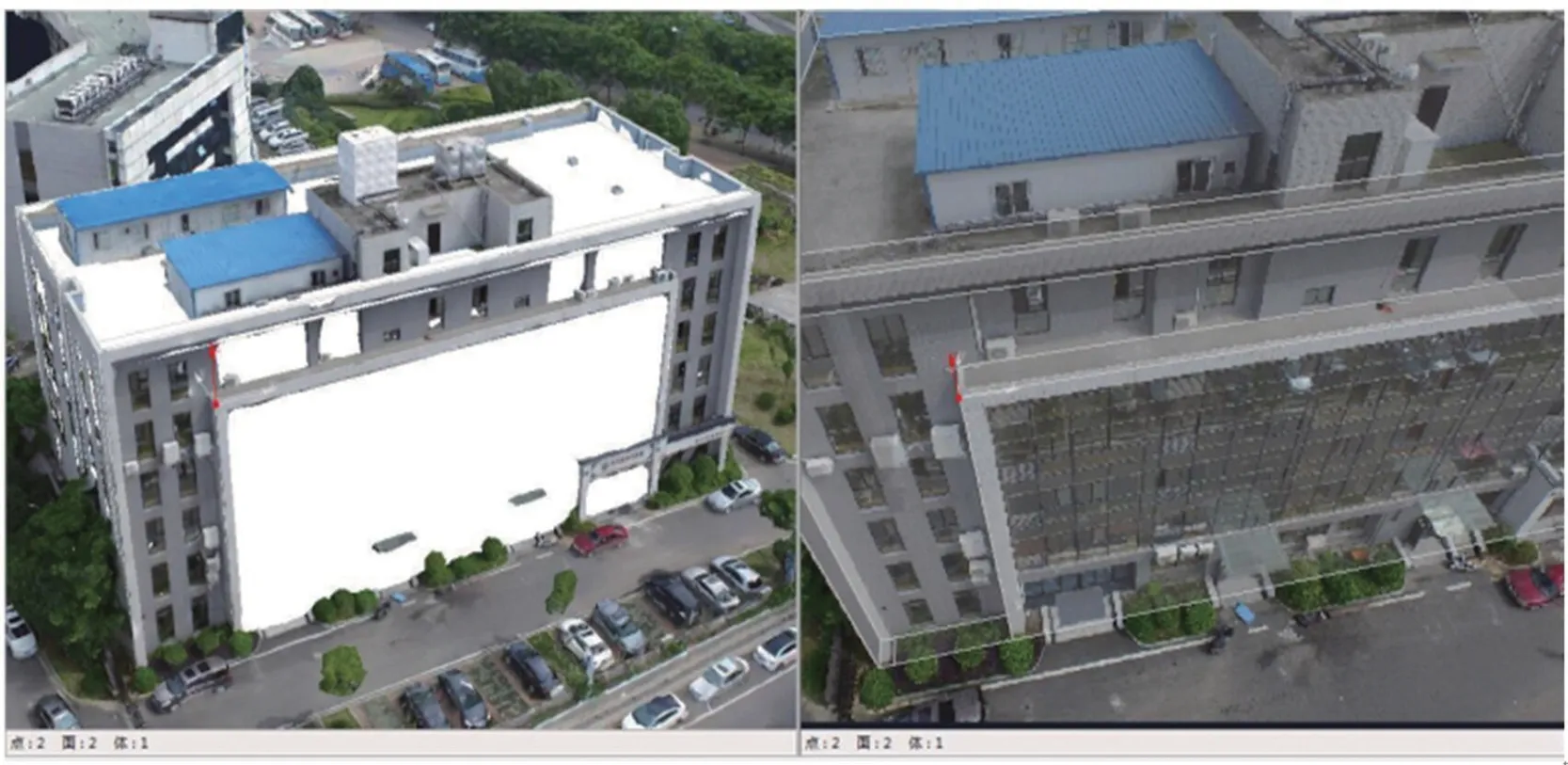
图7 倾斜实景三维实地取证示意图
4 实验结果与分析
选取宁波市部分地区作为实验区进行试验,利用PCI软件对实验区影像数据进行几何纠正、影像配准、影像融合、匀光匀色、信息增强等预处理。最后得到高分辨率的遥感影像图,形成DOM。对于DOM的质量,采用控制点中误差的精度进行统计(如表1所示),从精度检测发现存在的个别粗差点,需要剔除后重新计算。检测结果表明遥感影像精度小于2.5 m,满足技术体系要求。基于感知哈希算法的遥感影像分类,对于算法的分类质量采取目视解译的方式随精度进行判断,结合实验区结果精度(如表2所示),检测结果表明正确率达到90%以上。利用ArcGIS软件和图斑分析工具实现变化图斑快速核查,层级匹配信息包括区划范围、目视解译内容、审批等,之后利用宁波市督察系统将数据进行“上传下达”,整合数据后得到成果,在之后的督查中更新完善并且达到长效的生命周期管理。在此基础上,发现违法性质的图斑,利用倾斜实景三维技术进行实地取证(如图8)。
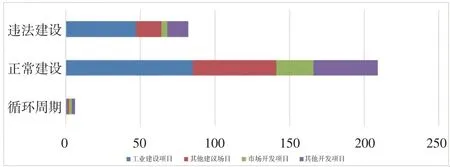
图8 实验区违法比例情况
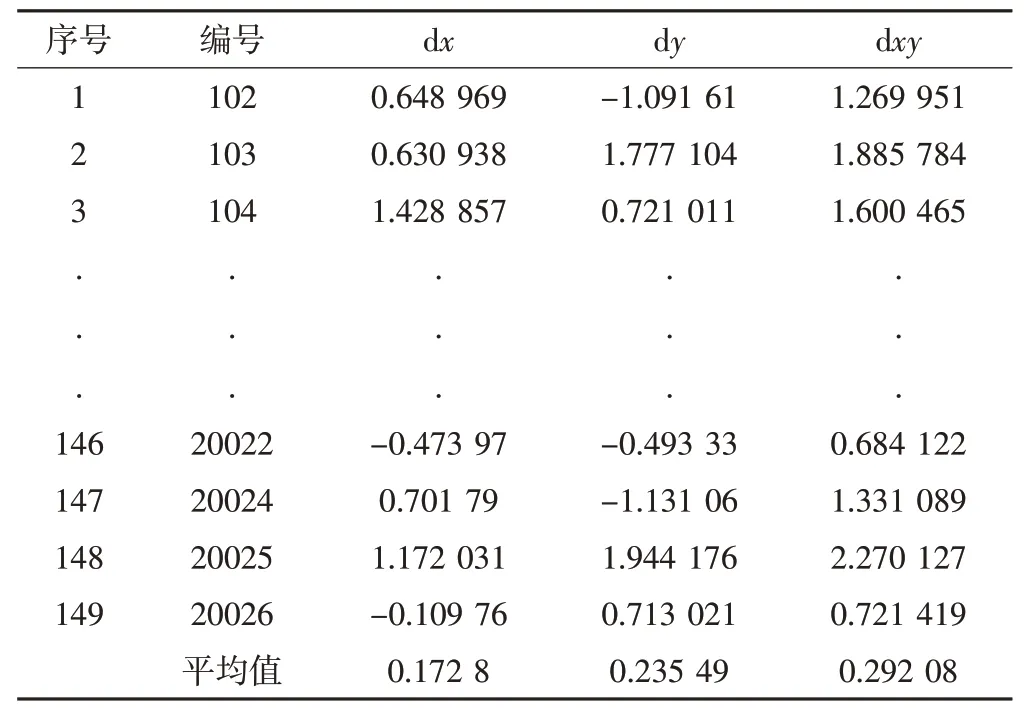
表1 检查点精度分布
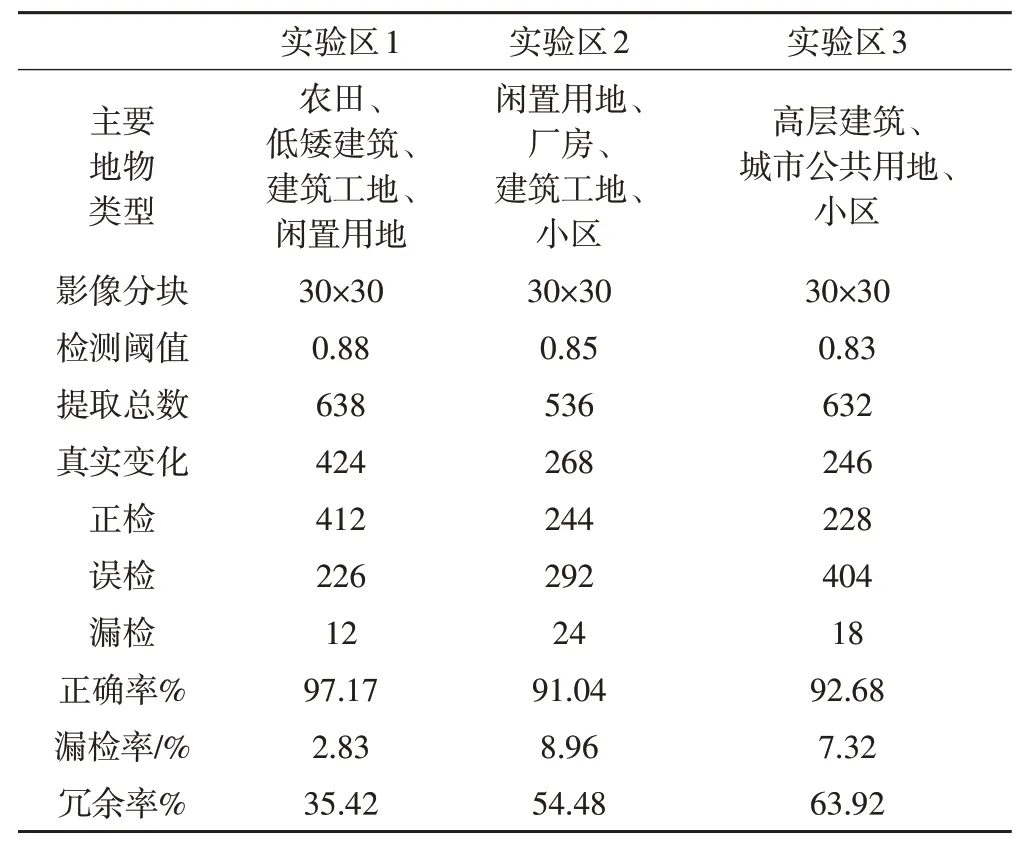
表2 部分实验区精度提取
5 结语
随着国家对规范建设、生态建设等问题越来越重视,城乡督察工作也越来越重要,在当前遥感信息技术高速发展的新形式下,结合高效、成熟的技术手段为督察工作提供支撑。本文以宁波市城市建设遥感动态监测的关键技术,遥感影像的快速智能处理、基于感知哈希算法的遥感影像变化发现、基于层级信息匹配的变化图斑空间化技术、变化图斑快速核查和反馈技术和倾斜实景三维快速建模取证,构建空天地一体化辅助城市建设遥感督察服务体系。实现利用遥感技术、地理信息技术和计算机技术,建设变化图斑的采集、处理、分发、甄别和查处等全流程技术体系,为相关工作提高了效率。
猜你喜欢
北京测绘(2022年9期)2022-10-11
资源导刊(信息化测绘)(2022年3期)2022-05-05
绿色科技(2021年5期)2021-11-28
大数据(2021年6期)2021-11-22
电脑爱好者(2021年8期)2021-04-21
中国科学数据(中英文网络版)(2020年4期)2021-01-20
电脑爱好者(2020年20期)2020-10-22
华南地震(2020年3期)2020-10-20
空间科学学报(2020年6期)2020-07-21
计算机技术与发展(2020年4期)2020-04-30
