
Design,modeling,and control of morphing aircraft:A review
2022-04-27 08:26:16LinglingCHUQiLIFengGUXintianDUYuqingHEYangchenDENG
Chinese Journal of Aeronautics 2022年5期
Lingling CHU, Qi LI, Feng GU, Xintian DU, Yuqing HE,Yangchen DENG
a State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
b Institutes for Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China
c University of Chinese Academy of Sciences, Beijing 100049, China
d Shenyang Aircraft Design & Research Institute, Shenyang 110034, China
KEYWORDS Aircraft design;Dynamic modeling;Fault tolerance;Flight control;Intelligent material;Morphing aircraft;Unmanned Aerial Vehicles(UAV)
Abstract A morphing aircraft can adapt its configuration to suit different types of tasks,which is also an important requirement of Unmanned Aerial Vehicles(UAV).The successful development of an unmanned morphing aircraft involves three steps that determine its ability and intelligent: configuration design, dynamic modeling and flight control. This study conducts a comprehensive survey of morphing aircraft.First,the methods to design the configuration of a morphing aircraft are presented and analyzed.Then,the nonlinear dynamic characteristics and aerodynamic interference caused by a morphing wing are described. Subsequently, the dynamic modeling and flight control methods for solving the flight control problems are summarized with respect to these features.Finally, the general as well as special challenges ahead of the development of intelligent morphing aircraft are discussed. The findings can provide a theoretical and technical reference for designing future morphing aircraft or morphing-wing UAVs.
1. Introduction
1.1. Research background
In military as well as civilian applications, the demand for multi mission aircraft is growing. Fixed-wing aircraft do not always possess the optimal aerodynamic characteristics in the full flight envelope. Therefore, the use of morphing aircraft has become one of the key strategies to address this demand and has been widely studied by various research institutions and scholars. Fundamentally, the morphing-wing design allows engineers to change the wing shape to over the duration of the flying process so as to optimize structural efficiency,survivability, stealth, and other aspects of aerodynamic performance.
Since 2017,a European-funded project has been developing smart airplane wings for bird-like flight that sense pressure gradients in the air and accordingly adapt their shape in real-time instantaneously. Their wings can reduce fuel consumption by at least 1% and COemissions by 0.5%. Airbus has completed the simulation test of its A320 wings. In July 2020, engineers at Airbus demonstrated the entire flight process of AlbatrossONE in which the free wingtip swing reduces the wing load and wingtip stall. They verified the unique advantages of the morphing-wing design in terms of energy savings, emission reduction, and wind-gust adaptability.Meanwhile, the US Air Force Research Laboratory (AFRL)and National Aeronautics and Space Administration (NASA)retrofitted an Adaptive Compliant Trailing Edge, which can expand its flight envelope to Mach 0.75 at a maximum altitude of 40,000 ft.,through camber change and span-wise twisting at high rates. They successfully completed flight tests.
However, due to the limitations of the morphing aircraft configuration and intelligent control technologies,the conventional fixed wing is still preferable in harsh or complex mission environments.For example,in 2019,Black Swift Technologies(BST)and the National Oceanic and Atmospheric Administration (NOAA) jointly developed a UAV system for the low boundary layer observation of hurricanes and tropical cyclones. In 2020, Tengdun Technology Company, in conjunction with the China Meteorological Administration, used the ‘‘double-tailed scorpion” UAV to enter the circulation of Typhoon No. 16 ‘‘Langka” to observe its internal structure and the sea waves. These exposed the inherent flaws of the conventional fixed wing,such as low endurance,low resistance to strong wind gust, and inability to consider the characteristics of high and low speed.
Thus, the development of morphing-wing aircraft is extremely urgent. However, due to constraints of safety, economy and other factors, the development and testing of morphingwing aircraft are facing difficulties. As a very flexible and safe carrier, the UAV is widely used to verify innovative designs and advanced theories; therefore, research on morphing-wing UAVs can promote and catalyze the development of morphing-wing aircraft. In the future, the morphing-wing UAV which will be used in complex environments, including warfare, target tracking, maritime operations, polar scientific research,typhoon detection,and high-and low-altitude reconnaissance,will become the main development trend of aircraft.
For a morphing aircraft or morphing-wing UAVs, three key technologies that determine their flight performance,intelligence,and reliability are:the configuration design method of deformation, modeling method of the nonlinear and unsteady deformation process, and flight control method. At present,most of research is focused on these aspects in the study of morphing aircraft.
This review focuses on the morphing aircraft and describes its characteristics and classification. Furthermore, the emphasis of this review is on summarizing the configuration design methods, modeling, and control techniques of such aircraft.This review can provide a theoretical basis for the development and application of the morphing aircraft,promote its development and that of the morphing-wing UAV, and further promote the development of the modern aircraft itself.
1.2. Definitions and classifications
According to the North Atlantic Treaty Organization(NATO), by changing its shape of locally or globally, an aircraft can adapt to multiple mission requirements in real time,and maintain optimal efficiency and performance in a variety of flight environments.
Morphing aircraft is a relatively new aircraft concept with the ability to adapt during flight.It can expand its flight envelope,improve the control characteristics,and efficiently accomplished tasks with different attributes and combinations.It is a cutting-edge technology in the field of modern aerospace and an important development direction of future aircraft.
Morphing aircraft are classified into three types.(A)micro-,medium-, and large-scale morphing by its morphing scale; (B)internal and external flow component morphing by morphing position and surrounding gas flow characteristics; and, (C) inplane morphing and out-of-plane morphing by morphing mode.There is also a fourth classification done by the morphing realization method,which is subdivided into three variants:wing-body adjustment, airfoil adjustment, and active flowcontrol morphing.This study explores the fourth classification method. The further classification of the variants is shown in Fig. 1.
(1) Wing-body adjustment:This method changes the overall aerodynamic configuration of the aircraft by means of variable sweep, wing folding, variable wing area, variable span,or winglet tip to meet the requirements of different flight modes. It is usually realized as large-scale morphing.
(2) Airfoil adjustment: The aerodynamic characteristics of the airfoil are improved by changing the chord length,thickness, and camber, to improve the flight efficiency.With the development of intelligent materials and structures, the application of airfoil-adjustment morphing has become common. Compared with the traditional aileron and flap control, airfoil adjustment can achieve better flight performance.It is usually realized by mesoscale morphing.
(3) Active flow control: It refers to local deformation by micro-driving elements and intelligent materials or change in the local virtual shape by shockwaves to alter the flow-field structure and efficiency of the aircraft.The main methods of active flow control include active skin vibration,adaptive shock control bump,circulation control,and active variable stiffness.It is usually realized by micro-scale morphing.From the perspective of deformation, active flow control changes the aerodynamic characteristics of the aircraft by changing the shape of the local hardware of the wing. Therefore, active flow control also belongs to a class of micro scale deformation wings. Active flow control method can be used to increase lift, reduce drag, reduce noise, improve maneuverability and other applications of aircraft. Especially in the process of wing body adjustment and airfoil adjustment, it can also be combined with active flow control to improve the phenomenon of flow separation caused by the above two deformation methods, so as to improve the airfoil aerodynamic characteristics.
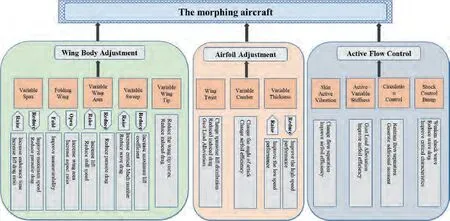
Fig. 1 Classification of morphing aircraft by morphing realization mode.
2. Development of morphing aircraft
2.1. Development of morphing aircraft
In fact, in 1890, Clement Ader, a Frenchman, put forward a variant of Avion,which imitates bat wings.The wing of Avion can be deformed in flight,and the maximum wing area can be changed by 50%.However,the avion flexible wing has obvious shortcomings in stability, maneuverability and driving efficiency,and finally fails.In 1903,the Wright brothers invented the first powered aircraft named Skywalker 1, which successfully completed its flight and marked the beginning of manned aircraft.Skywalker-1 is the first morphing aircraft in the strictest sense, because it had the latest wingtip curling mechanism to realize the flight control. In 1908, Henri Farman invented the first aircraft with hinged ailerons instead of flexible wings,called ‘‘Framan III”. Compared with ‘‘Avion” and‘‘skywalker-1”, the fixed wing aircraft‘‘Framan III” has obvious advantages of simple structure, higher aerodynamic efficiency, high safety and low cost. Therefore, in the past century, the design goal of aircraft has changed from the aircraft can fly to the aircraft can complete the task safely, high speed, stably and efficiently. Rigid fixed wing aircraft has become the mainstream of aircraft development.
With the maturity of aircraft technology, people have higher and higher requirements for the technical standards of aircraft. It is not only necessary to improve the aircraft speed,altitude and other technical indicators, but also need the aircraft to take into account a variety of flight missions or flight modes,such as high/low speed,cruise/combat,etc.However,the fixed wing UAV with one or two optimal flight state performance as the design goal is far from enough. Since 1930,the US and the former Soviet Union began to study the morphing aircraft. Researchers suggested shortening the take-off and landing distance to balance the high-and low-speed operations of the aircraft. To improve transonic maneuverability and expand the range of flight speed, researchers adopted the idea of variable-sweep angle and variable span for early morphing aircraft. The F-14, X-53, B-1, MiG-23 aircraft adopted the variable-sweep wing design scheme to allow the aircraft to adapt their performance to the subsonic and supersonic regimes. Mak-10 and Mak-123 fighter aircraft adopted the variable-span design scheme,which improved their endurance.Because these morphing aircraft are all realized on rigid wing,the realization method of morphing mechanism inevitably results in the increase of structural weight and failure rate,which causes great cost to the flight performance of the aircraft itself. At that time, due to the limitation of materials such as driving device and deformation mechanism,engineers encountered a bottleneck in the realization of morphing wing. Therefore, most of these aircraft have been decommissioned.Consequently, the development of morphing aircraft slowed down at the end of the 20th century.The important morphing aircraft projects of the early 20th century are shown in Fig. 2.
With the development of intelligent material and structural technology, research institutions and scholars have begun to apply intelligent materials to the design and application of morphing aircraft. Due to their reconfigurability, flexibility,and light weight, intelligent materials can morph seamlessly and continuous, which greatly improves the performance of the aircraft. Thus, intelligent materials can help overcome the developmental bottleneck of morphing aircraft.
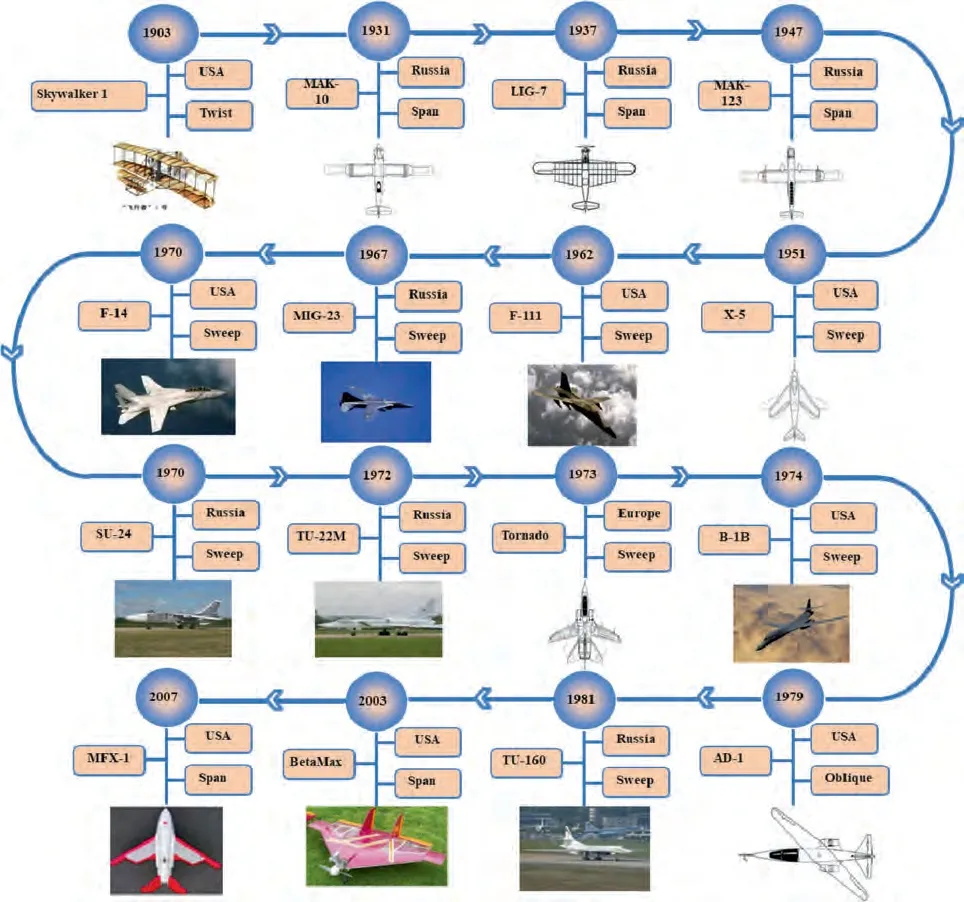
Fig. 2 Early important morphing aircraft projects.
Since 1980, the NASA, in collaboration with the Defense Advanced Research Projects Agency and other institutions,has proposed various morphing aircraft project plans, such as the Active Flexible Wing(AFW) projectand Smart Wing(SW)project.In these plans,they introduced intelligent flexible materials to realize the continuous and seamless morphing of wing. These intelligent flexible materials can reduce structural weight, increasing the flutter critical Mach number and improving flight maneuverability in model wind tunnel tests and flight verification. In 2003, DARPA and the Air Force Research Laboratory (AFRL) launched the Morphing Aircraft Structure (MAS) project, which focused on the research of low-speed and transonic deformed-wing technology. By changing the aerodynamic shape, they ensured the aerodynamics of each state in the envelope were optimized,and realized single-aircraft can accomplish various forms of tasks. In that project, NextGen Aeronautics Co. Ltd. adapted a‘‘sliding skin”scheme,they designed MFX-1(45 kg)/MFX-2 (90 kg) aircrafts and conducted the flight test; the ‘‘folded wing” scheme proposed by Lockheed Martin Co. and the‘‘compressed wing” scheme by Raytheon Co. have not been verified in actual flight. In 2019, NASA and Massachusetts Institute of Technology (MIT) launched the ‘‘Mission Adaptive Digital Composite Aerostructure Technologies(MADCAT)”project,which aimed to achieve accurate morphing of full-scale wings by combining intelligent materials such as shape memory alloys and piezoelectric actuators.
Meanwhile, the German Aerospace Center (DLR) also researched the deformed-wing structure in 1995. Since then,other European research institutions have started researched the deformed-wing. From 2012-2015, the CHANGE project developed a technology that increased the camber during the high-lift take-off and landing phases, reduced the wingspan in the high-speed flight state, and increased the wingspan and reduced the camber in the air standby stage.This technology has been tested on UAVs. In 2011, 64 organizations including Airbus and Bombardier, participated in the design and development of the Saritsu project. This project is a technical research program under the 7th Framework Aeronautics and Air Transportation research plan of the EU. The project focuses on the integrated sensor technology, morphing structure technology, and multifunctional material technology.The goal of the project is to identify the means to improve the quality of an aircraft through the reduction of wing drag,weight, and noise, and structural health monitoring. In 2020,Clean Sky’s Morphing Wing project introduced advanced morphing devices for the combination of a leading edge and a morphing trailing edge of an airfoil.According to the project heads, the team are now designing the morphing concepts related to wing tip,leading edge,and trailing edge.Fig.3 summarizes the recent projects related to morphing aircraft designed with flexible materials in various countries.
China, too, has made progress in its research of morphing aircraft. Several Chinese academic institutions have incorporated intelligent flexible skins and introduced new morphing mechanisms in their morphing aircraft designs. For example,Harbin Institute of Technology used a composite wing-skin structure for in-plane shear morphing, Nanjing University of Aeronautics and Astronautics used trapezoidal corrugated skin structure. The First Aircraft Institute introduced a flexible cellular structure with crisscross topology, Northwest Polytechnic University designed a variable-sweep wing based on a connecting rod-slider structure. Beijing University of Aeronautics and Astronautics designed a new type of adaptive variable-curvature wing with a double-rib-plate structure,Nanjing University of Aeronautics and Astronautics designed a variable-thickness wing based on Shape Memory Alloy(SMA)and N-shaped deformed wing. These achievements have provided a strong foundation for the development of morphing aircraft technology in China. In 2018, the Government of China launched a large-scale independent software project named the National Numerical Wind (NNW) Tunnel, which focuses on the R&D of numerical simulation software for fluid dynamics, with Computational Fluid Dynamics(CFD)as the core.Related CFD software and mesh morphing technology will further promote the design and development of morphing aircraft.
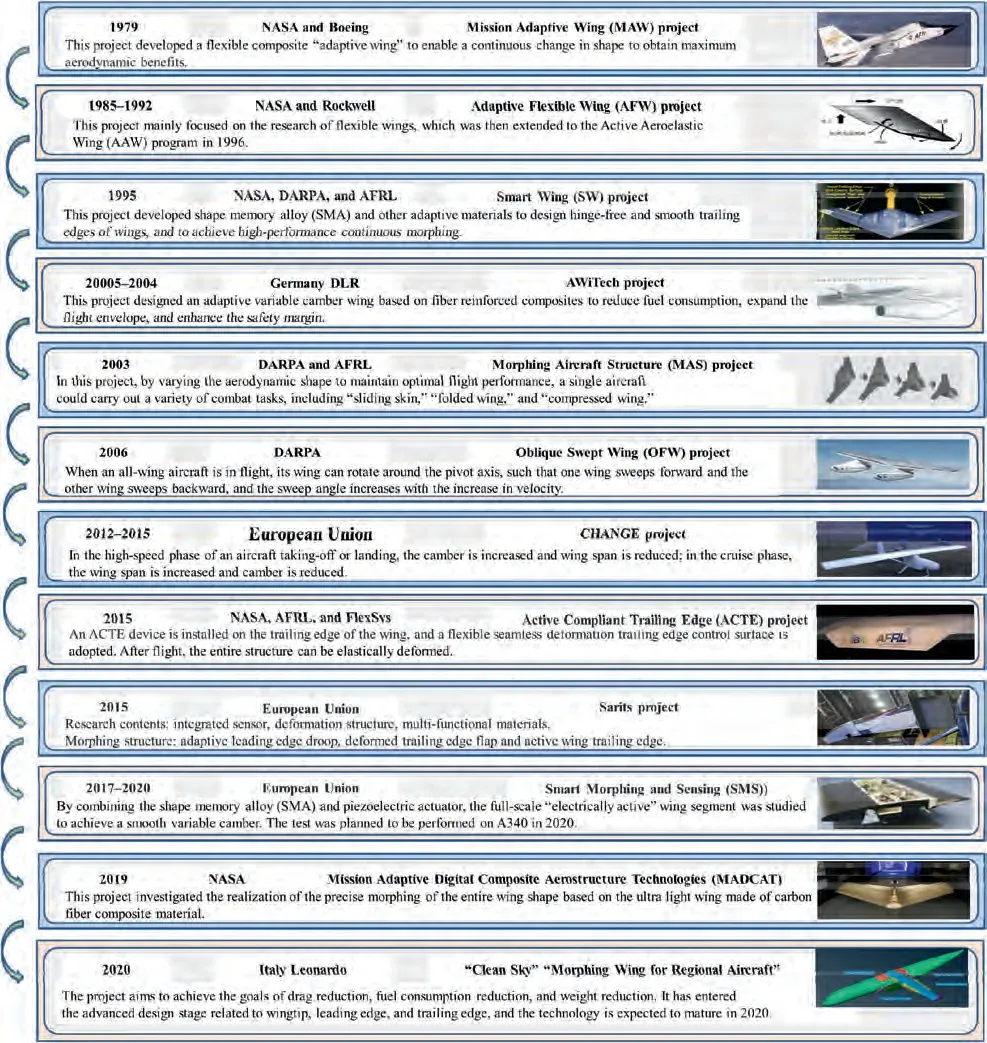
Fig. 3 Morphing aircraft projects over the years.
Since more than 100 years of development,the structure of the morphing aircraft has evolved from the complex, heavy mechanical rigid-body morphing technology to active morphing with flexible structures. The main morphing realization method has also developed from the traditional swept-back and telescopic method to variable camber, spanwise bending,variable wingtip, and combined morphing methods. It is not difficult to see that the development of intelligent materials and structures reconciles the contradiction between the realization of deformation and the weight of structure, which not only solves the problem of weight structure, but also makes the deformation continuous, smooth and controllable. But at the same time, due to the flexible and continuous characteristics of intelligent materials and structures,the system produces flutter or vibration phenomenon, which brings new nonlinear aeroelastic problems, makes the model description of the system more complex,and its nonlinear and coupling characteristics more obvious. Further, it also puts forward higher requirements for flight control methods.
2.2. Design goals of morphing wing aircraft
From the perspective of mission requirements,the design goals of morphing aircraft are to reconcile the conflicting technical requirements of aircraft in different mission scenarios within the flight envelope. Such as:
(1) At the same time, it has the characteristics of low resistance at high speed and maneuverability at low speed;
(2) Optimization of lift drag ratio in cruise state under large load weight difference scenarios;
(3) Different requirements for spanwise lift distribution of wing under steady flow and wind disturbance conditions.
However, the conventional fixed wing design method can only meet the requirements of a specific scenario, or is a compromise between two scenarios. It cannot achieve the optimal performance in two or more scenarios at the same time. After the introduction of morphing wing design, the configuration design of aircraft can be the optimal solution that satisfies two or more scenarios at the same time.Configuration realization,dynamic modeling and flight control method of morphing wing aircraft are the three key areas of morphing wing research.
2.2.1. Design goals of configuration design of morphing aircraft
Design goals of configuration design of conventional fixed wing is how to achieve the maximum stiffness under the lightweight requirements to meet the high aerodynamic load capac-
ity of aircraft. However, the morphing aircraft is essentially different from the conventional fixed wing aircraft.The design goal of the morphing wing configuration is to select the most profitable and less costly morphing mode for various mission requirements,so as to keep the best performance under different mission requirements,and then design a lightweight,small drive, large deformation, fast response and high load-bearing morphing structure.
2.2.2. Design goals of dynamic modeling of morphing aircraft
The conventional fixed wing itself is a complex dynamic system, and its coupling and nonlinear characteristics are obvious. Strictly speaking, in the flight process, its mass is timevarying, and its structure also has elastic deformation, and the acceleration of gravity varies with the height. This leads to a very complex functional relationship between the aerodynamic forces acting on the outside of the aircraft and the UAV layout, flight state parameters and other factors. Therefore, a lot of assumptions need to be made in the process of conventional fixed wing modeling, for example:
(1) The airplane is regarded as a single rigid body without considering the elastic characteristics of wing, fuselage and tail, and the mass is constant;
(2) The center of mass of the airplane is fixed in the body coordinate system;
(3) The airplane is a plane symmetrical layout,which is not only symmetrical in geometry, but also symmetrical in internal mass distribution, and the inertial product is 0;
(4) The ground coordinate system is inertial coordinate system;
(5) Ignoring the curvature of the earth,that is,adopting the‘‘Flat Earth hypothesis”;
(6) The acceleration of gravity is constant and does not change with flight altitude.
For the deformable wing, first of all, because the mass of the deformation mechanism on the deformable wing is large,and the flexible and elastic characteristics are obvious, the aircraft cannot be regarded as a single rigid body to completely and accurately describe the state of the aircraft; Second, the structural changes of the whole aircraft caused by the deformation are significant,the mass distribution changes significantly,and the fixed centroid assumption is no longer applicable; In addition, the deformation method of the deformable wing at this stage is becoming more and more intelligent Most of the deformations are adaptive, and the left and right wings are not necessarily symmetrical,so the assumption that the aircraft is symmetrical is no longer applicable. Therefore, the assumptions 1, 2 and 3 cannot be satisfied on the morphing wing aircraft.
The cancellation of the above assumptions, coupled with the nonlinear aeroelastic problems caused by the flexible deformable wing aircraft, makes the modeling of the deformable wing aircraft more difficult. The modeling method of conventional aircraft cannot be used for reference. The purpose of modeling is to provide a good control object for the controller. Too complex dynamic model will put forward higher requirements for the design difficulty and reliability of the controller.To sum up,the design goal of the dynamic modeling of the morphing aircraft is to establish an accurate and simple dynamic model to represent the dynamic and kinematic characteristics of the morphing aircraft and provide an accurate mathematical description for the flight controller.
2.2.3. Design goals of flight control of morphing aircraft
The control of morphing wing aircraft is the slowest step in the research of morphing aircraft. In essence, the conventional fixed wing control method is also suitable for the morphing aircraft, but because the model of the morphing wing aircraft is more complex than the conventional fixed wing, and the model has fast time-varying characteristics, it is still a difficult problem to establish the appropriate controller for the morphing wing aircraft in different flight states and different structures. In addition, with the development of the morphing aircraft, the morphing ability and environment adaptability are getting higher and higher. Accordingly, the adaptability of the flight controller is also put forward higher requirements.Therefore, according to different deformation methods or dynamic models, to select the control method with adaptive and self-adjusting ability which can quickly match the mathematical model of each state to carry out the optimal control,to ensure the safety and reliability of the whole flight process and deformation process of the aircraft. This is the design goal of the control method of morphing aircraft.
2.3. Representative research institutions
Several institutions are proactively undertaking the R&D of morphing aircraft at home and abroad. In the US, these institutions include the NASA (Green Research Center, Langley Research Center, Dryden Flight Research Center), US Air Force Research Laboratory, DARPA, MIT, University of Maryland, University of Florida, Boeing, Rockwell, Loma,New Generation Aviation Technology, and Raytheon. In Europe,these institutions include Airbus,Alenia Marki,Bombardier,and Embraer.The research institutions and their main achievements are shown in Table 1.
3. Configuration design of morphing aircraft
The configuration design of morphing aircraft will be discussed from the morphing realization method, which includes: wingbody adjustment, airfoil adjustment, and active flow-control.Meanwhile,the lack of uniform standards in the design process will also be exposed. The analysis of existing circumstances about the configuration design of morphing aircraft can point out some existing defects.
3.1. Wing-body adjustment
The designs that can realize a shape-shifting aircraft include variable-span wing, folding wing, variable area wing,variable-sweep wing, and so on. F-14, F-111, X-53, B-1, and MiG-23 have adopted the variable-sweep wing design scheme to adaptively adjust their performance in the subsonic and supersonic flight regimes. Arrison et al.(Virginia Tech University) developed a variable-span UAV named BetaMax based on the rack-and-pinion mechanism, and successfully achieved a span change of 36% and an area increment of 15%in flight(Fig.4).Again,the difference in static stability between the retracted and extended case is nearly 5%. This team conducted several flight tests of the ‘‘Betamax” UAV,but the static stability of the system had problems due to the change of the center of gravity and aileron position caused by the deformation, which led to many flight failures. Later stage,the team focused on verifying the stability of the aircraft during the expansion and contraction of the wing span. The results showed that the aircraft would vibrate during the expansion and contraction of the wing. Yang et al.(Harbin Institute of Technology)uses‘‘Rapture 40”UAV as prototype to design a variable-span and cambered span morphing UAV(Fig. 5). The structure is a new dual-drive morphing wing that meet the requirements of the plane’s flexibility, flexure and load. The results show that when the wingspan is extended, the lift drag ratio is effectively improved, and when the wing is bent up or down,the stability and maneuverability are improved respectively, so that the UAV can improve theadaptability and survivability under various flight states, such as take-off and landing, cruise and maneuvering flight. Hu et al.(Northwestern Polytechnical University) studied the aeroelastic characteristics of the folded wing during deformation,the results show that the folding and unfolding processes have opposite effects on the aeroelastic stability of the folded wing, and the effect is more significant with the increase of folding and unfolding rates. At the same time, when the folding wing deforms at a very slow speed,the aeroelastic stability of the folded wing is similar to that of the quasi steady aeroelastic analysis. Xu et al.(Nanjing University of Aeronautics and Astronautics)studied the influences of airfoil thickness on the aerodynamic loading distribution and hinge moments of a folding-wing aircraft,Jung and Kim(Seoul University)studied the unsteady aerodynamic characteristics of a folding wing and highlighted the necessity to consider the dynamic characteristics of fold morphing in the control process. Reed et al.(a cornerstone research group in the US)designed a telescopic rib mechanism. In this mechanism, the wing chord length can be changed and the wing area can be increased by up to 80%by controlling the rib as it slides through a micro-DC motor(Fig. 6). However, due to the introduction of an additional driving mechanism, the wing requires a larger internal space and extra structural mass.To solve the problem of the induced drag in the airfoil caused by the tip vortex, Smith et al.(University of Bristol, UK) used the computational fluid dynamics code by the German Aerospace Center to study the aerodynamic characteristics of a winglet bent 0-90° from the plane of the airfoil. The results showed that the tip twist effectively reduced the induced drag, improved the lift-drag ratio, and reduced fuel consumption.
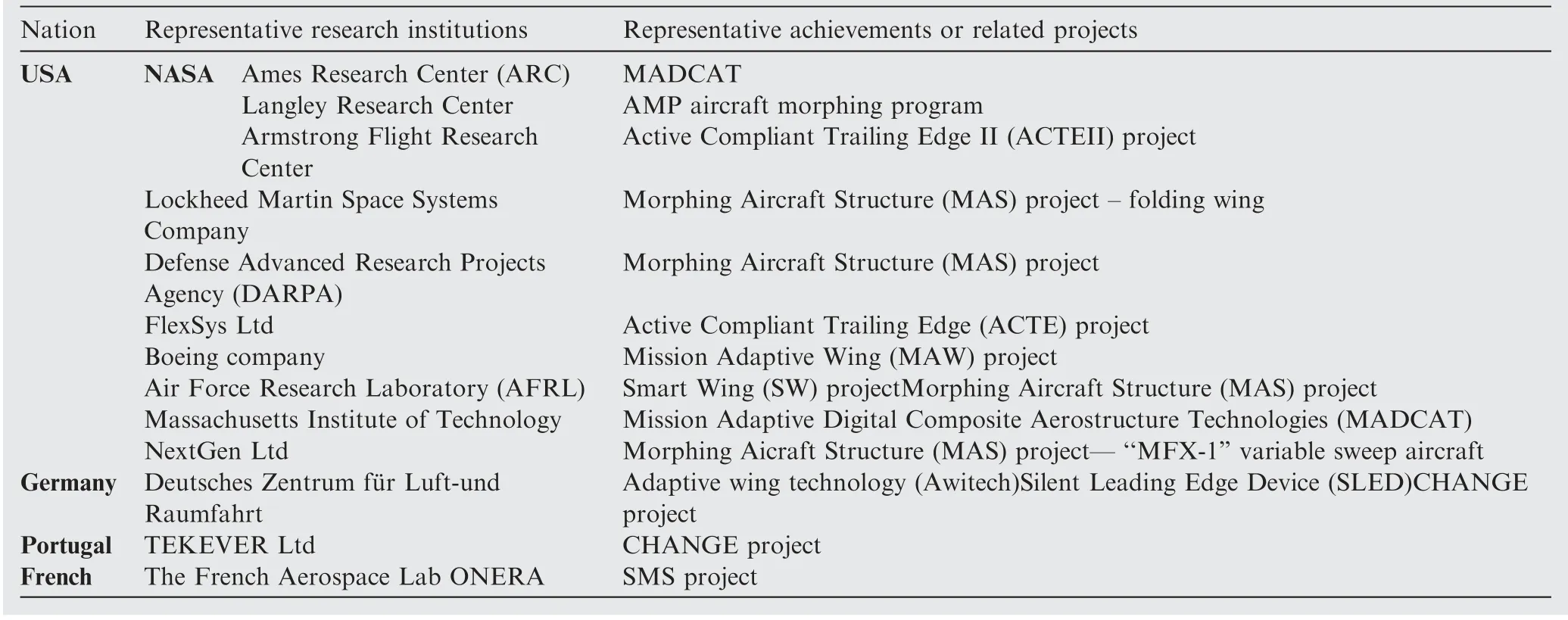
Table 1 Research institutions undertaking morphing aircraft research and development.

Fig. 4 Retraction and extended stage of BetaMax wing27.
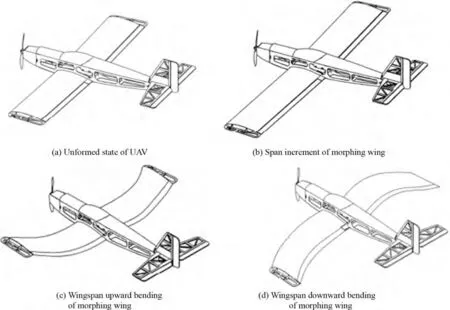
Fig. 5 Different states of a variable-span and cambered span morphing UAV28.
Remark 1: the wing-body adjustment has an obvious effect on the aerodynamic characteristics of the aircraft,as it greatly improves the performance of the aircraft in extreme environments. However, the weight and complexity of the actuator that adjusts the wing body decreases the aircraft’s reliability.In addition,adjusting the wing body changes the aerodynamic center of the aircraft, which makes it more difficult to design the controller. the wing-body adjustment changes the position of the aerodynamic focus greatly, which will significantly change the stability of the system and increase the difficulty of controller design. Therefore, when adopting the wingbody morphing method, the designer should comprehensively evaluate the positive performance and negative cost caused by the deformation, and the dynamic changes of aerodynamic focus and load distribution should be taken into account.
3.2. Airfoil adjustment
The methods include wing twist, variable camber, variable thickness. Kota et al.(FlexSys Co., US) designed a type of flexible skin and flexible mechanism (Fig. 7)that could alter the relative camber of an airfoil within 0-15%, so that the lift-drag ratio of the wing could be increased by 51% and the maximum lift coefficient by 25%. But when the degree of variable camber become bigger, there will be the phenomenon of reverse pressure gradient,which would cause the flow separation.Gao(University of Science and Technology of China)studied the unsteady aerodynamic characteristics of a variable Joukowsky airfoil in the subsonic and supersonic regimes using a semi-analytical method.As a result,changing the camber of airfoil affected the unsteady additional lift coefficient.Bowman et al.(Patterson Air Force Base) studied the relationship between airfoil camber and wing lift-drag coefficient at different speeds. Based on the study, Bowman proposed a method to modify the lift-drag coefficient by changing the aspect ratio. For the wing-bending method, the Langley Research Center, NASA, developed a super elliptical wing(Fig. 8)by imitating the change in the spanwise curvature of seagulls in flight,which can adapt to different flight environments. However, the large deformation of materials adopted makes the load bearing weaker, this issue still needs solving.For the wing twist method,Garcia et al.(University of Florida) designed a type of twisted wing that improved the rolling speed of the aircraft, but simultaneously increased the flight resistance. Vos et al.(Delft University of Technology, The Netherlands) designed a new type of active twisting wing that increased the lift coefficient to 0.7. Airbus A330/340 wing has realized the function of a variable camber that meets the requirements of matching lift-drag characteristics under different loads. They verified that the aerodynamic efficiency was increased by at least 2%.
Remark 2: Methods to adjust the airfoil and alter the performance without increasing the deadweight and the complexity of the mechanism have been widely used in recent years.However, this method requires high deformability, loading capacity, and continuity of the wing skin, due to the present limitation of materials. Therefore, it still cannot improve the performance greatly. In the process of airfoil deformation,researchers focus on the lift drag characteristics of the aircraft and the improvement of system efficiency. But ignore the phenomenon of air separation in advance caused by airfoil deformation. Therefore, it is suggested that designers should not ignore the phenomenon of flow separation. If necessary, additional deformation or control methods (such as active flow control method) can be reasonably used to make up for the delayed flow separation caused by deformation, so as to further improve the overall flight performance of the system.
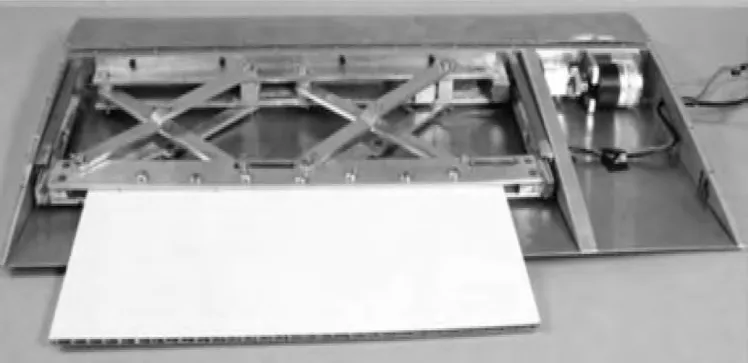
Fig. 6 Variable chord length mechanism of Reed32.
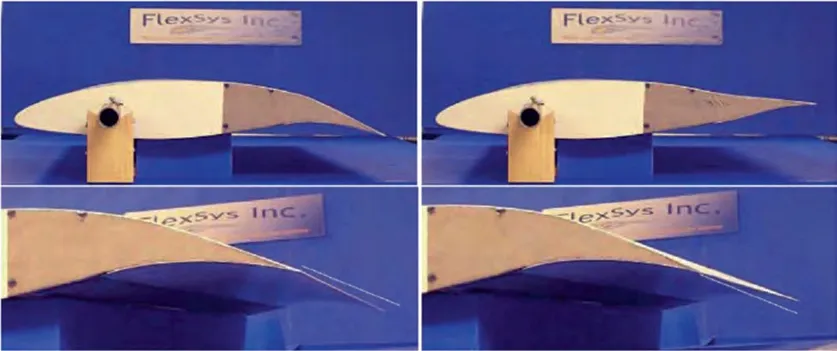
Fig. 7 FlexSys trailing edge variable-camber wing34.

Fig. 8 NASA HECS wing37.
3.3. Active flow control
The methods to achieve active include skin active vibration,shock control bump, circulation control, and active variable stiffness. For the obvious flow separation phenomenon on the airfoil surface at a large angle of attack, Liu et al.(Xiamen University) applied synthetic plasma jet excitation on the wing’s leading edge to study its influence on lift characteristics.The results showed that the plasma actuator could effectively suppress the flow separation, generate additional rolling moment, and improve the lateral and longitudinal stabilities.Lan et al.(Air Force Engineering University) analyzed the influence of different synthetic jet excitation positions on the aerodynamic characteristics of NACA0015 airfoil using the Proper Orthogonal Decomposition(POD)method.The results showed that, when the excitation position was 0.12-0.4 times the chord length, the synthetic jet excitation effectively restrained the flow separation around the airfoil, improved the lift coefficient, reduced the drag coefficient, and increased the lift-drag ratio by 293%. Li et al.(Northwestern Polytechnic University) and Jinks et al.(Imperial College,London)analyzed the drag reduction characteristics of shockwaves by attaching two-dimensional or three-dimensional bumps devices to the airfoil surface. The results show that the wave resistance could be effectively reduced by choosing the appropriate location and height of the bulge. Thus, the control technology of critical characteristics of the aircraft were effectively improved to achieve the goal of increasing lift and reducing drag. Barbarino et al.(University ‘‘Federico ”of Napoli (NA), Italy) used the morphing of an SMA as the driving force to optimize the topology of the internal structure of a bulge. This method improved the efficiency of the active flexible trailing edge, reduced the wave resistance, and enhanced the aerodynamic function of the wing. Kuder et al.(Laboratory of Composite Materials and Adaptive Structures, Switzerland) proposed a novel morphing concept of variable stiffness which is based on a distributed arrangement of embeddable bi-stable composites. The bistable composite material is embedded in the wing as a stiffness control switch, which makes the wing presents two stiff stages: rigid and flexible. Through the analysis, it can be seen that the distributed stiffness control,on the one hand,reduces the requirements of the system drive in the high lift mode,on the other hand, ensures the dynamic characteristics by the rigid part.Ai et al.(Advanced Composites Centre for Innovation and Science) proposed a variable stiffness morphing trailing edge flap. This method controls the shape of the morphing trailing edge by selectively changing the in-plane stiffness variation,also enables geometric control over deformed shape of the morphing structure. By experiment, the variable stiffness can reduce energy requirement of the actuation and has the effect of airfoil self-noise mitigation effects.
Remark 3:The active flow-control method can significantly change the aerodynamic characteristics at the required time and position,and is commonly used for specific purposes such as gust mitigation or boundary-layer separation.However,it is generally open-loop control, which may cause the secondary flutter of aircraft. The location, deformation displacement and actuation frequency of the actuator will greatly affect the effect of flow control. Therefore, the unsteady closedloop control method based on model prediction,stability analysis and feedback control technology can be carried out, and the position,direction and actuation frequency of the actuator need to be reasonably designed to obtain the optimal control effect.
3.4. Applications of intelligent materials
Intelligent material can sense the external stimulations, judge and process the external stimulations by itself properly.Generally, different intelligent material has different functions, such as the sensing function,the feedback function,the information recognition function,the response ability for the external stimulations, the self-diagnosis ability, the self-repair ability, and the adaptive ability. By virtue of the characteristics of intelligent material, such as light weight, high energy density, selfdriving, ability of the large deformation, and self-adaptive, it is easier to achieve the design of the morphing wing. It may greatly reduce the negative impact caused by the deformation mechanism, and improves the comprehensive performance of the deformable wing aircraft. Recently, intelligent material has been widely used in the field of the morphing aircrafts.
According to the role of the intelligent material in the morphing aircraft, it can be divided into two main research directions. One direction is the flexible skin technology for the requirement of the morphing aircrafts, where the flexible skin not only needs large-scale deformation ability, but also needs the bearing capacity;The other direction is the smart actuator technology. It mainly studies the driver mechanism with the ability of fast response, the low power consumption, and the high carrying capacity. At present, intelligent material has been widely used in morphing aircraft mainly including Shape Memory Alloys (SMA), Shape Memory Polymer (SMP), electro/magnetic shrinkage materials, piezoelectric composites,etc.
Svoboda and Hromcˇı´k(Czech Technical University)designed a structure of the smooth trailing edge,where Macro Fiber Composite (MFC) has been used as the actuator.As the load capacity of the material with one layer MFC is limited, four MFC materials were used as the actuators to improve the comprehensive stiffness and bearing capacity of the actuator (Fig. 9). Gu et al.(Northwestern Polytechnical University) proposed a new configuration and topology of deformable wing based on Shape Memory Alloy(SMA). By optimizing the layout of the smart actuator and the topology of the wing structure, the final configuration can achieve smooth, continuous and accurate geometric changes (Fig. 10)where the problems of the buckling and limited capacity of driving force of SMA are improved.Bilgen et al.(Virginia Tech) designed a wingtip twist micro aircraft, which adopted the intelligent material of Macro Fiber Composite (MFC). Liu and Zhu(Nanjing University)designed a distributed layout of the mechanism to realize the continuous deformations, which is suitable for small UAV with low Mach number. By the advantages of ultrasonic motors such as high torque, small size, light weight, self-lock and rapid response,parallelogram linkage driven by ultrasonic motor are applied to the variable camber wing to drive the trailing edge (Fig. 11). Yokozeki et al.(Laboratory of Composite Materials and Adaptive Structures, Switzerland)designed a morphing wing with corrugated flexible seamless flap-like structure.A layer of rubber film is used on the surface of the skin to ensure the smoothness of the wing surface, and the matrix is reinforced by carbon fiber composite.To control the airfoil shape,there are two servomotors installed inside the prototype wing by the chordwise tension of the connected wires. compared with the traditional hinged control, the lift of variable morphing wing with corrugated structures is increased when the aileron angle increases. In 2019, NASA published the latest research progress of the Mission Adaptive Digital Composite Aerostructure Technologies (MADCAT)project. The structure of the flying wing model with 4 m span is constructed by a large number of octahedral volume elements (Fig. 12(a))which injection modeled using the advanced carbon fiber composite materials are skeletal and bolted together. And, computers integrated into the wing makes use of the adaptive algorithms to help it morph and twist.This combination of the adaptive algorithms,lightweight material, and the modular design all make the wing adaptive for different tasks and can realize the most efficient shape mid-flight (Fig. 12(b)).
It can be seen that intelligent material realize light weight,intelligence, and continuous large deformation, which brings considerable benefits to the performance of the morphing aircrafts. However, intelligent material is mainly used on airfoil adjustment at present, due to the limitations of intelligent materials in volume, weight and material properties.It cannot achieve the high load-carrying capacity and the large deformation capacity. Especially for the wing skin, it is an important challenge in the design of the intelligent material to maintain both the out-plane bearing capacity and the in-plane deformation capacity.
3.5. Lack of uniform standards
Although researchers have extensively investigated the morphing aircraft,they have not agreed on a unified design criterion,such as for the morphing scale, flight performance improvement, flight quality, and smart-skin-morphing ability. This makes it the difficult to evaluate the morphing capability and aerodynamic performance.
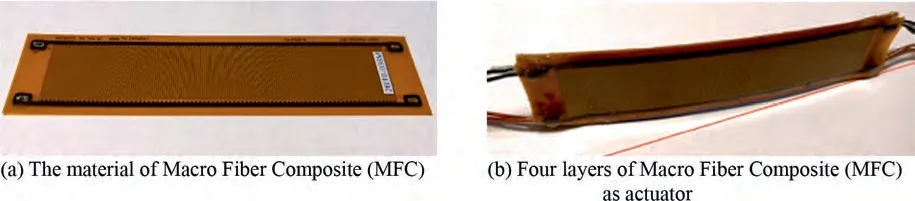
Fig. 9 Materials for variable camber wing50.
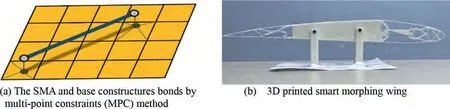
Fig. 10 Morphing wing based on Shape Memory Alloy (SMA)51.
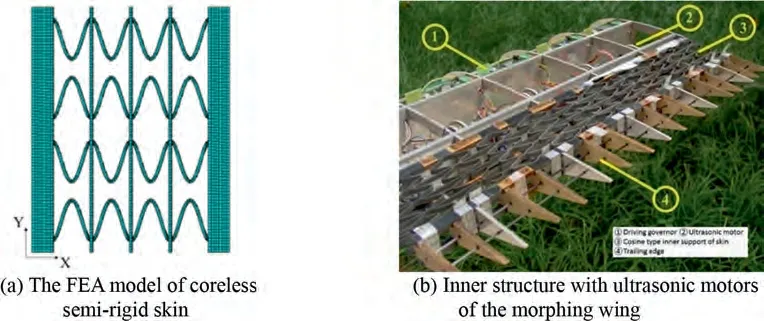
Fig. 11 Distributed layout of the mechanism of the morphing wing54.
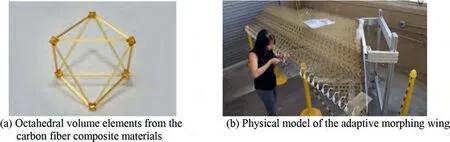
Fig. 12 The adaptive morphing wing of MADCAT project14.
In recent years, with the problem becoming more prominent,many scholars have comprehensively researched the multidisciplinary optimization and design standards for the morphing wing. You et al.(Seoul National University,Korea)discussed the criteria for the design of skins for the flexible wing with a variable camber. Zhang et al.(Nanjing University of Aeronautics and Astronautics) carried out multidisciplinary design optimization for the aeroelastic morphing region of a shape-shifting aircraft, including its airfoil, structural parameters,and pre-morphing shape.A multidisciplinary and multi-objective optimization program with the maximum rolling moment, maximum flutter critical velocity, and minimum wing weight was designed by You et al.. (Tennessee State University), which can obtain the optimal ratio of the actuator width,thickness,and base wing shape Ciarella et al.(British Aircraft Research Association) developed a general software framework that adopted the modular wing design method, integrated several complementary morphing technologies, and identified and established the required wing shape according to the mission requirements of each flight stage.
In the process of conventional aircraft design, Multi-Disciplinary Optimization(MDO)design methods and criteria are often used to optimize the performance index of single mission requirements. The morphing aircraft needs to meet the requirements of multi mission, which completely subverts the single mission flight design method of traditional aircraft.The design requirements of multi mission objectives of morphing aircraft lead to more complex and diversified design methods and criteria. In my opinion, the research of morphing aircraft generally includes conceptual design, overall design,detailed design and optimization design, etc. In the design of morphing aircraft, the effects of several typical morphing methods have been verified through the theoretical analysis,simulation and flight test of scholars for years.The basic reference and criteria for designers to design morphing aircraft is listed as follows:
Variable Span:
Raise: Increase endurance time, Increase lift drag ratio;
Reduce: Improve maximum speed, Reduce parasitic drag.
Variable Wing Area:
Raise: Increase lift, Reduce stall speed;
Reduce: Reduce parasite drag.
Variable Sweep:
Raise: Increase critical Mach number, Reduce wave drag;
Reduce: Increase maximum lift coefficient.
Variable Camber:
Change the angle of attack, Change airfoil efficiency.
Wing Twist:
Change spanwise lift distribution, Reduce induced drag,
Gust Load Alleviation.
3.6. Summary of Section 3
In general, the improvements made to the design of a morphing aircraft only focus on singular goal, meanwhile, this will inevitably cost other performance.For example,the wing morphing improves the lift-drag characteristics of the aircraft,but increases the structural weight and failure rate by introducing distributed actuators.The flexible morphing method improves the wing’s ability to mitigate gust at the cost of bearing capacity. The asymmetric variable-span structure improves the maneuverability of the aircraft and expands the flight envelope of the system, but increases the risk of flight stability reduction. But, the design of a morphing aircraft must consider all performance aspects comprehensively because every aspect is critical to its serviceability and to the safety of its passengers and/or cargo. Therefore, multi-objective and multidisciplinary constraints must be integrated, designed, and optimized to improve the comprehensive performance of the aircraft in terms of drag, noise, and weight reduction, structural health monitoring, and other aspects. Besides, in order to evaluate the quality of morphing aircraft more standardized,the evaluation standard for the configuration design of morphing aircraft should also be established.
4. Dynamic modeling of morphing aircraft
The flow around a morphing aircraft has nonlinear and unsteady characteristics, which reflect on the control performance, reducing the flight quality. Therefore, the dynamic modeling and flight control method that can adapt to the morphing process of the aircraft are also important research directions in this field. In recent years, researchers have made important progress in related fields. Sections 4 and 5 summarize the recently developed modeling and control methods of morphing aircraft, respectively. Compared with conventional aircraft, morphing aircraft exhibit large and strong timevarying, nonlinear dynamic characteristics during morphing.Therefore, establishing an accurate and suitable dynamic model to describe the system characteristics without increasing the complexity of the controller is the key to realizing the best possible flight performance characteristics.
As discussed in Section 3, the higher the morphing level is,the greater the proportion of the morphing features are introduced. About the morphing aircraft, the dynamic and kinematic characteristics are strongly nonlinear, fast time-varying and highly coupled, which makes the system modeling extremely complex. And then, the flexible elastic characteristics of the morphing aircraft lead to the obvious aeroelastic phenomenon of the system, which makes the system present high-order characteristics.However, the accuracy of modeling is limited by the reduction of model order and unmodeled mode.Therefore,it is necessary to select the appropriate modeling methods according to various morphing characteristics.At present, the modeling methods of a morphing aircraft can be classified into three types: parametric modeling (i.e., the nonlinear structure of the morphing aircraft is transformed into a linear structure by parameterization);multibody modeling (i.e., the morphing aircraft is regarded as a multi-rigidbody system); and flexible body modeling (i.e., the order of the model with flexible characteristics is reduced) Table 2.63-96 summarizes the dynamic modeling methods of morphing aircraft. Certainly, those modeling methods mentioned are equally important and widely used in the conventional aircraft.
4.1. Multibody modeling method
The morphing aircraft is regarded as a combination of various single rigid bodies connected via hinges. This method can describe the motion of the morphing part and its influence on the system more accurately. Scholars at home and abroad have developed a variety of methods that can model multirigid-body systems, including the Newton-Euler vector mechanics method, an analytical mechanics method repre-sented by the Lagrange equation, Kane method, Roberson-Wittenburg (R-W) method, and variational method. Among them,the Newton-Euler method,second-generation Lagrange method, and Kane method are the most widely used methods in the modeling of morphing aircraft.
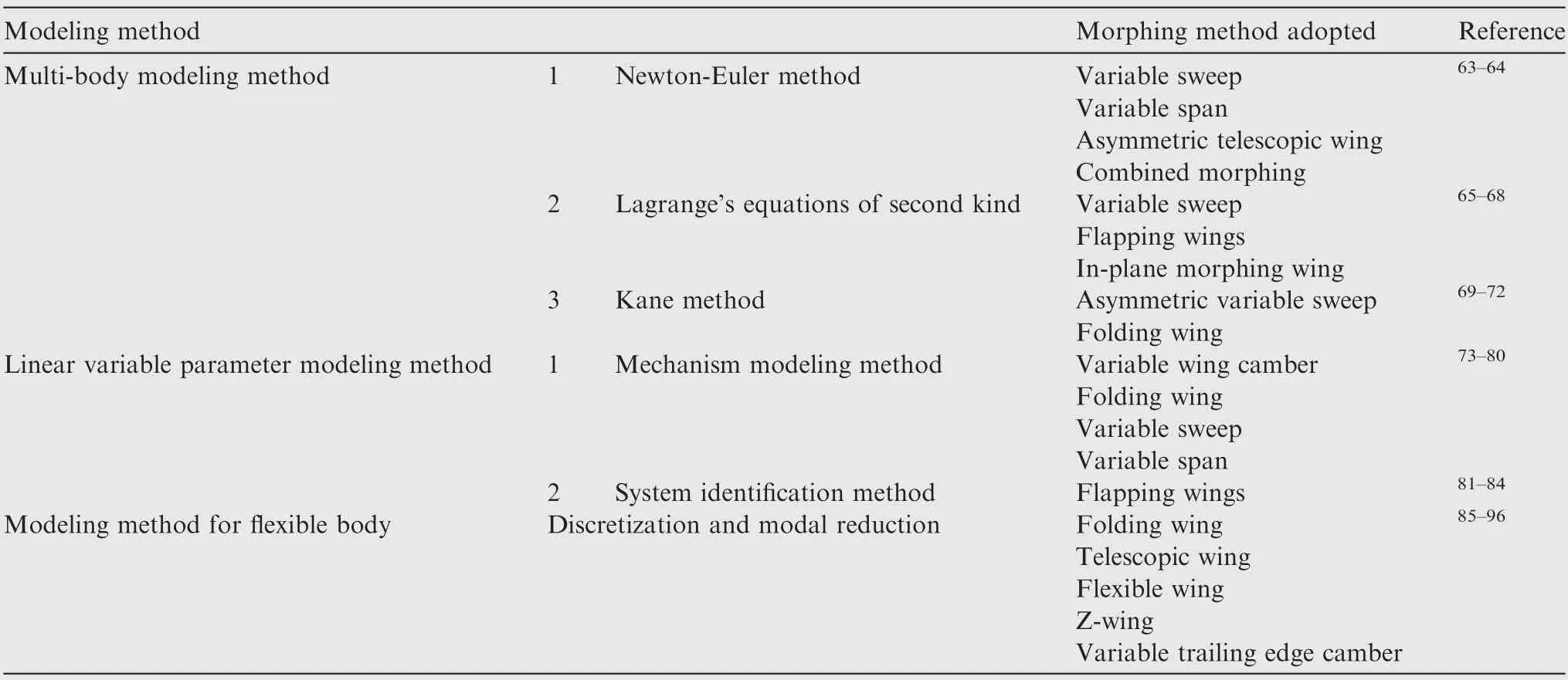
Table 2 Dynamic modeling methods of morphing aircraft
Note: Since most morphing aircraft have flexible elastic characteristics, they are considered flexible body systems in the strictest sense.However,when modeling based on the idea of a multibody system, flexible morphing is usually ignored,and the aircraft is considered a multi-rigid-body system.
4.1.1. Classification of multibody system
Multibody system can be divided into two types:tree structure and non-tree structure. The difference between the two structures can be explained by the concept of path. If there is only one path between any two rigid bodies in the system, the system is said to have a tree structure;if there are at least two(or more) paths between two rigid bodies, the system has a nontree structure. For a non-tree system, the constraint of some hinges can be replaced by the corresponding binding force,whereas the original non-tree system can be equivalent to the tree system.
The tree structure is the basis of multibody systems, and can be subdivided into rooted tree and suspended tree. In a multibody system, one rigid body is hinged by another rigid body (zeroth rigid body) with a set of known motion parameters.This type of tree is called a rooted tree.A typical example of such a system is the robotic manipulator.if no rigid body in the system is not connected with the zeroth rigid body,its tree structure is called a suspended tree.For the suspended tree,we can regard the rigid body,which is fixed to the reference coordinate system, as the zeroth rigid body. Then, the system is equivalent to a rooted tree.
Therefore,the fuselage of the morphing wing vehicle can be defined as the zeroth rigid body of the system, whereas the wing is equivalent to the slave rigid body connected to the main rigid body by a hinge. Thus, the morphing aircraft is equivalent to a multi-rigid body system with rooted trees.
4.1.2. Typical multibody dynamic modeling methods
Newton-Euler method: Each part of the morphing aircraft is independent,the dynamic equations of which are derived from the momentum theorem. Then, the kinematic equations reflecting the constraints between the rigid bodies are supplemented to form closed equations of the morphing aircraft system. However, this method is only applicable to the absolute rooted-tree system. Even though the theory of this method is clear, when the constraints are too many, or their distribution and properties are unknown, the solution becomes more complex and the computational efficiency dwindles. Liu et al.(Northwest Polytechnic University) established a six Degrees of Freedom (DoF) multibody dynamic model of the Firebee morphing aircraft by using Newton-Euler method.Moreover,to accurately describe the whole morphing process, a T-S fuzzy model was established based on the T-S theory.The simulation results show that the method could effectively adapt to the nonlinear, time-varying dynamic characteristics of the morphing process. Wang et al.(Northwest Polytechnic University) established a dynamic model for analyzing the response characteristics of a morphing aircraft with variable sweep and span using the Newton-Euler method.The dynamic model can be used in this type of morphing aircraft.
Lagrange’s equations of the second kind:In this method,the system is analyzed holistically without considering the constraints and anti-binding forces between the rigid bodies in the system. The direct relationship between kinetic energy,potential energy, and generalized force is analyzed, and the second-order differential equation of the system is obtained according to the principle of virtual work.Lagrange’s equation of the second kind is invariant to coordinate transformation.It only needs to consider the known active force, and can ignore the unknown constraint reaction force.Therefore,this method has the advantages of fewer DoF, lower system complexity,and simple solution. However, it is only applicable when all the constraints of the system are known,and therefore has limitations. Based on the Lagrange method, Shi and Song(Beijing University of Science and Technology) established a dynamic model of the plane morphing wing of NexGen airlines. The aerodynamic load on the leading edge of the wing and the external elastic skin were considered in the model.The correctness of the model was verified by ADAMS simulation. Jiang(University of National Defense Science and Technology) used the pseudo-coordinate Lagrange equation to model the multibody dynamics of a flapping-wing morphing aircraft. He then conducted a flight simulation of the model.Obradovic and Subbarao(University of Texas of Arlington)considered the wing as an equivalent of two hinged beam elements. Thus, he obtained the dynamic equations of a gull wing aircraft by the Lagrange method and vortex lattice method and analyzed the dynamic characteristics of symmetric and antisymmetric morphing.
Kane method:The Kane method is also called the Lagrange form of D’Alembert’s principle, which is applicable to both holonomic and nonholonomic systems. Based on the D’Alembert principle,the Kane method uses the generalized rate as an independent variable to describe the motion of the system.This method does not need to calculate the kinetic energy function and its derivatives. Moreover, the calculation procedure of the method is programmable,and therefore has been widely used in multibody dynamics modeling. Zhang and Wang,Wan and Xuand Liuet al.(Beijing University of Aeronautics and Astronautics) established the dynamic model of a folding-wing aircraft based on the Kane method, and characterized the influence of wing morphing on the aircraft dynamics equation. Then, they verified the accuracy of the model through simulation. Based on the Kane method, Tong and Ji(University of Science and Technology of China) established a multibody dynamic model of an asymmetric variable-sweep UAV, describing the transient behavior and dynamic characteristics during the morphing process.
Remark 1: The multibody dynamic modeling method is suitable for the deformed wing and has been widely used for the same, especially for large-scale deformation aircraft with wing-body adjustment. However, different methods have different characteristics, so the applicable environment will also be different. The Newton-Euler method introduces force and moment to the center of mass of the aircraft, focusing on the motion process.It is suitable for systems with few rigid bodies,such as: variable sweep wing with only one node or two segment folding wing; Lagrange’s equations of the second kind can better describe complex systems, albeit complete systems.This method is more suitable for deformable wings with more rigid body joints, such as multi segment telescopic wing and multi segment folding wing. The Kane method is simple, efficient, and widely applicable. Multibody modeling method is used to some morphing aircraft which can be regarded as multiple relatively independent components connected by flexible or semi-rigid, such as telescopic wing, swept wing, folding wing, etc. But in this stage, the flexible continuous structure is used instead of the rigid structure in the morphing aircraft.So,it does not satisfy the assumption of multi rigid body modeling method.
4.2. Linear variable-parameter modeling method
The system model established by Linear Parameter Varying(LPV) method will have a linear system structure, but its system matrix can still be changed by varying the external measurable parameters. Therefore, it can express the characteristics of a nonlinear system. As the LPV modeling method can not only accurately describe the nonlinear or time-varying systems, but also possesses the advantages of a simple linear system structure and easy control, it has been widely used in the modeling of morphing aircraft.
4.2.1. Description of linear parametric model
Linear parameter varying (LPV) method is one in which the state coefficient depends on the change in time-varying parameters. It can be expressed as a polynomial function based on measurable scheduling variables. The model can describe the nonlinear time-varying characteristics of a system.
Linear parametric models are broadly classified into two types: State Space model (LPV-SS) and Input-Output model(LPV-IO). In the modeling of a morphing aircraft, the state space model is often used to describe the nonlinear dynamic model of the aircraft.
It is worth noting that the LPV model of a nonlinear system is not unique, and differs with the selection of scheduling parameters, system equilibrium point, and LPV modeling method. Then, even if the LPV model characterizes the same nonlinear system and has the same input and output characteristics,the authenticity of the description of the original nonlinear system and performance index will be different.Furthermore, the controllers designed for different LPV models will have different effects.Therefore,the establishment of a reasonable and efficient LPV model will play an important role in the comprehensive performance of the system.
4.2.2. Classification of linear parametric modeling method
To establish a suitable LPV model, it should obey the following principles:
(1) The maximum matching degree represents the state response of the original nonlinear system.
(2) The selected scheduling parameters can be measured online.
(3) The variable-parameter coefficient matrix only depends on the scheduling parameters.
(4) The model does not increase the complexity of the controller design and stability analysis.
The common LPV modeling methods are mainly classified into two categories: mechanism modeling and system identification methods. Due to the large number of parameters involved in the design of a morphing aircraft, the noise interference in the deformation process and the system identification method error are relatively large. Therefore, the system identification method is not applied as much as the mechanism modeling method.
In the mechanism modeling method,the dynamic equations of an object are established and then linearized at the selected equilibrium points. Thus, a set of linear time-invariant model with fixed parameters is obtained.Finally,the final LPV model is constructed by interpolating the model set.Generally,a nonlinear model can be transformed into an LPV model using three methods: Jacobian linearization, state transformation,and equation replacement methods. Among these, the Jacobian linearization method is the most common. However,these methods depend on the equilibrium point and require the parameters to change gradually. Sza´szi et al.(University of Minnesota) established the longitudinal kinematics model of the Boeing 747 series 100/200 aircraft through three LPV methods, and compared the advantages and disadvantages of the resulting models and their difficulty. Wen et al.(Beijing University of Aeronautics and Astronautics)derived the longitudinal dynamic model of a system based on the Kane method,and further derived the corresponding LPV model. Based on the LPV model,the bounded L2 gain adaptive synovial control strategy was realized. Based on multibody dynamics and the LPV modeling method,longitudinal LPV models of morphing aircraft were established by Jin et al.(Beijing University of Technology), Yue et al.(Beijing University of Aeronautics and Astronautics), and Yin et al.(Nanjing University of Aeronautics and Astronautics).Wu and Shao(Northwestern Polytechnic University) proposed an improved function replacement method to establish the longitudinal LPV model of a morphing-wing UAV. This method introduced a partial linearization based on the existing function replacement method,making the selection of variable parameters more flexible and improving the practicability of the function replacement method. However, because the morphing process occurs rapidly, the method cannot ensure that the system always works near the equilibrium point. This leads to a large deviation between the dynamic characteristics of the LPV model and the actual system. To solve this problem, researchers have proposed a linearization method that does not depend on the equilibrium point. For example, Wangand Leithet al. (Beijing University of Aeronautics and Astronautics)proposed a LPV modeling method via velocity-based linearization. In this method, the differential of the original state variable was introduced as the augmented state quantity. Any working point can be linearized without relying on the equilibrium point.
The system identification method is divided into global identification and local identification approaches.The method is often used for designing the flapping-wing aircraft. In the global identification approach, all parameters of the LPV model are obtained from a global identification test. In the local identification approach, the parameters of the Linear Time Invariant (LTI) model at a fixed working point are obtained from a local identification test and the local model is identified. The global LPV model is then obtained by interpolating the local model. Marcos and Bennani(Bristol University) summarized the advantages, limitations, and requirements of the LPV modeling and control technology.They compared the design methods of LTI, gain scheduling,and LPV control with a spacecraft (reentry vehicle) as an example. Grauer et al.(NASA) established a nonlinear multibody dynamic model of a flapping-wing aircraft. They used the visual tracking system to mark the reflective marks on the aircraft to obtain the measured values, and reconstructed the state variables based on the system identification technology. Compared with the wind tunnel test, this method allowed the aircraft to fly freely and obtain more accurate measurements. Armanini et al.(Delft University of Technology, The Netherlands) established the lateral and longitudinal dynamic models of a flapping-wing aircraft, and used the common least-squares method and maximum likelihood estimation method to identify the LTI model of some characteristic points. Thus, they obtained the black box linear-state space model of the system.
Remark 2: The LPV method is relatively mature, and most researchers use the mechanism modeling method. The mechanism modeling method is simple to operate but greatly depends on the equilibrium point. In addition, since the LPV method has the problem of jumps in the system state during the switching process, the smooth switching and robust stabilization of the morphing process must be considered when designing the controller using the LPV model.
4.3. Modeling method for flexible body
For some morphing aircraft,due to their own morphing characteristics or due to the introduction of intelligent materials,the aircraft will have flexible, elastic properties such as low stiffness and weak damping. This will reduce the modeling accuracy if the structure is modeled as a rigid body.Therefore,to determine a modeling method suitable for a flexible body,the morphing structure should be equivalent to a flexible body.Considering the obvious coupling of aeroelasticity and dynamics in a flexible aircraft, the dynamic modeling process should be combined with structural dynamics.
Generally, it is difficult to solve the eigenfunction of vibration because the vibration of flexible wing is infinite dimensional. Therefore, it is necessary to discretize the flexible vibration first. The common discretization methods of higher-order systems are classified into the assumed mode method and the Finite Element Analysis (FEA) method. The hypothetical modal method uses the linear combination of a finite number of known modal functions to approximately determine the response of the system. The FEA method discretizes the flexible body into a group of small rigid-body elements.The finite and interrelated elements are used to simulate the infinite complex body, which is not limited by small morphing. The FEA method follows standards and specifications in theory and engineering. However, for complex aircraft systems, this method will include a high order of equations, a large amount of calculation, and low efficiency. For example,Gadient et al.executed the linearized dynamic modeling of DARPA’s long-endurance UAV named Condor. The linearized state space model has 707 orders of equations.Although the linear model can accurately express the dynamic characteristics, it complicates the design and stability analysis of the controller. In response to this problem, Gibson(The Boeing Company,USA)and Zhaoet al.(Nanjing University of Aeronautics and Astronautics) proposed low-order modeling methods for the control algorithm of the flexible aircraft.Based on the simplified modeling idea of rigid-flexible separation, the flexible wing is equivalent to the combination of a rigid-wing plate and a flexible hinge. They then combined the conventional flight dynamics analysis method to obtain a lower-order dynamic model. Through simulation, it is concluded that the approximate low-cost model has high accuracy.Qinused the finite element software to analyze the aerodynamic characteristics of a flexible variable-trailing-edge twodimensional airfoil. Based on the results, they designed the trailing-edge camber strategy under various flight states.
After discretizing the system structure, the dynamic model was constructed using the Newton-Euler method, Lagrange’s equations of the second kind, and virtual work principle.The vibration of a flexible body is infinite in nature.Therefore,regardless of the method used to discretize it, the dynamic model of the flexible body will exhibit high modal characteristics, which makes the subsequent dynamic analysis and controller design more difficult. However, in most cases, the influence of higher-order modes on the system is relatively small. Therefore, in practical engineering applications, the high-order modes can be truncated using various modal criteria, which can reduce the complexity of the dynamic analysis and controller design under the premise of ensuring the accuracy of the model. Taking a bionic aircraft with flexible wings as the research object,Yu(Beijing University of Technology)derived a low-order linearized dynamic model based on the quasi-stationary aeroelastic model of a flexible wing. By using the quasi-steady aerodynamic coupling relationship between the flight state and the slow time-varying components of wing-structure morphing,Yu reduced the order of the dynamic model, and thus obtained the low-order linearized dynamic model. This model described the main characteristics of the rigid-flexible coupling motion of the flexible wing aircraft,reduced the complexity of designing the gust mitigation controller, and improved its control accuracy. Zhang et al.(Beijing University of Technology)and Huang and Qiu(Beihang University) equated the telescopic wing to an axial extended element, and obtained the dynamic equation of the system using the modal discretization method. Wang and Dowell(Duke University) developed a general structural dynamics model that could predict the natural frequencies of a folding wing with a simplified geometry but an arbitrary number of wing segments. The model was derived using the beam theory and component modal analysis; the energy expressions and constraint equations were derived from kinematics, while the equations of motion were derived using Lagrange’s equations with Lagrange multipliers. Based on the linear plate theory, Tang and Dowelldivided the folding-wing aircraft into three parts, fuselage, inner wing,and outer wing, established the equation of motion for the whole system to conduct the natural mode analysis of the aircraft.Meanwhile,they also established an aerodynamic model using the 3-DoF vortex lattice method, focusing on the linear aeroelastic stability of the aircraft. Prabhakar et al.(Embry-Riddle Aeronautical University) also used the vortex lattice method to model the aerodynamics of a variable-sweep and variable-span UAV.Based on the aerodynamic data,they constructed a 6-DoF dynamic model to analyze the dynamic response of the aircraft during the morphing process. Yu et al.(Shanghai Microsatellite Engineering Center) derived the rigid-flexible coupling dynamic model of a second-order system through the pseudo-coordinate Lagrange equation for an aircraft with flexible characteristics. The order reduction method of a second-order unstable system with rigid-body mode decoupling was used to reduce the order of the model.The simulation results verified the effectiveness of the dynamic modeling and the model reduction method.
Remark 3: The flexible body modeling method combined with structural modeling can better describe the morphing aircraft with flexible characteristics by discretizing and reducing the orders of the system. However, due to the unmodeled and truncated modes generated during the process of discretization and modal reduction, appropriate methods should be adopted to prevent controller overflow or jump.
4.4. Summary of Section 4
Different types of deformation mechanisms of a deformed wing require different modeling methods. For example, for a class of large-scale morphing aircraft with wing-body adjustment,the multi-rigid-body modeling and parametric modeling methods are more suitable, but still encounter problems such as balance point dependence and large modeling errors. However, for the morphing wings with airfoil adjustment or active flow-control methods, the flexible body are modeled using parametric modeling methods. This type of modeling method,too, has its own set of challenges, such as an incomplete description of the system, low modeling accuracy, limited dynamic adaptability, and high complexity of the dynamic model. Therefore, the means to develop a reasonable, highprecision dynamic model that can adapt to rapid deformation is the focus of research in the field of morphing aircraft.
5. Flight control of morphing aircraft
The aerodynamic characteristics of an aircraft change in the process of morphing. The fast time-varying and strong coupling of the system caused by rapid morphing elevate the requirements for controller design. The adaptive requirements of morphing aircraft are becoming higher. Therefore, perception and prediction of environment or self-state by flight control method is also a new challenge.
The means to maintain flight stability and optimal performance is the core problem of the flight control of a morphing aircraft. At present, the control methods of morphing aircraft in the literature can be roughly divided into the linear control method, nonlinear control method, and intelligent method.Similarly, those flight control methods mentioned are equally important and widely used in the conventional aircraft.Table 3. 98-141 summarizes the mainstream control methods of morphing aircraft.
5.1. Linear control method
5.1.1. Conventional linearization control
The conventional linear control method has achieved good results in the conventional fixed-wing flight control. It is still widely used for the morphing aircraft as well,such as for classical PID control algorithm, pole placement, optimal control,robust control,and so on.Based on the linear model obtained from the system identification or linearization of a nonlinear system,the flight control of a morphing aircraft can be realized using the conventional linear control method.
The PID control method does not rely on an accurate dynamic model and has strong adaptability and robustness.However,it is limited to the single input-output system.Faced with the challenge of the Multiple-Input Multiple-Output(MIMO) systems and strong coupling comprehensive system of the morphing wing, the PID controller must consider the decoupling analysis and multilevel segmented control. This inevitably depreciates the performance of the controller. The pole assignment method generally uses state feedback or output feedback to introduce a controller to arbitrarily assigning the poles of a closed-loop system, and thus improve the dynamic performance of the system. The optimal control method is aclassical control theory. It is suitable for MIMO systems with high robustness.The method depends on the state equation of the system and is more suitable for computer-oriented computing.Robust control combines the concept of frequency domain with the state space method,which is an effective tool to solve the system uncertainty and increase the system’s robustness against dynamic uncertainty.Most of the above linear control methods rely on the accuracy of the system model.However,it is difficult to accurately measure and estimate some state information in actual flight of a morphing aircraft. Therefore, a state observer is often introduced to estimate the unknown state.
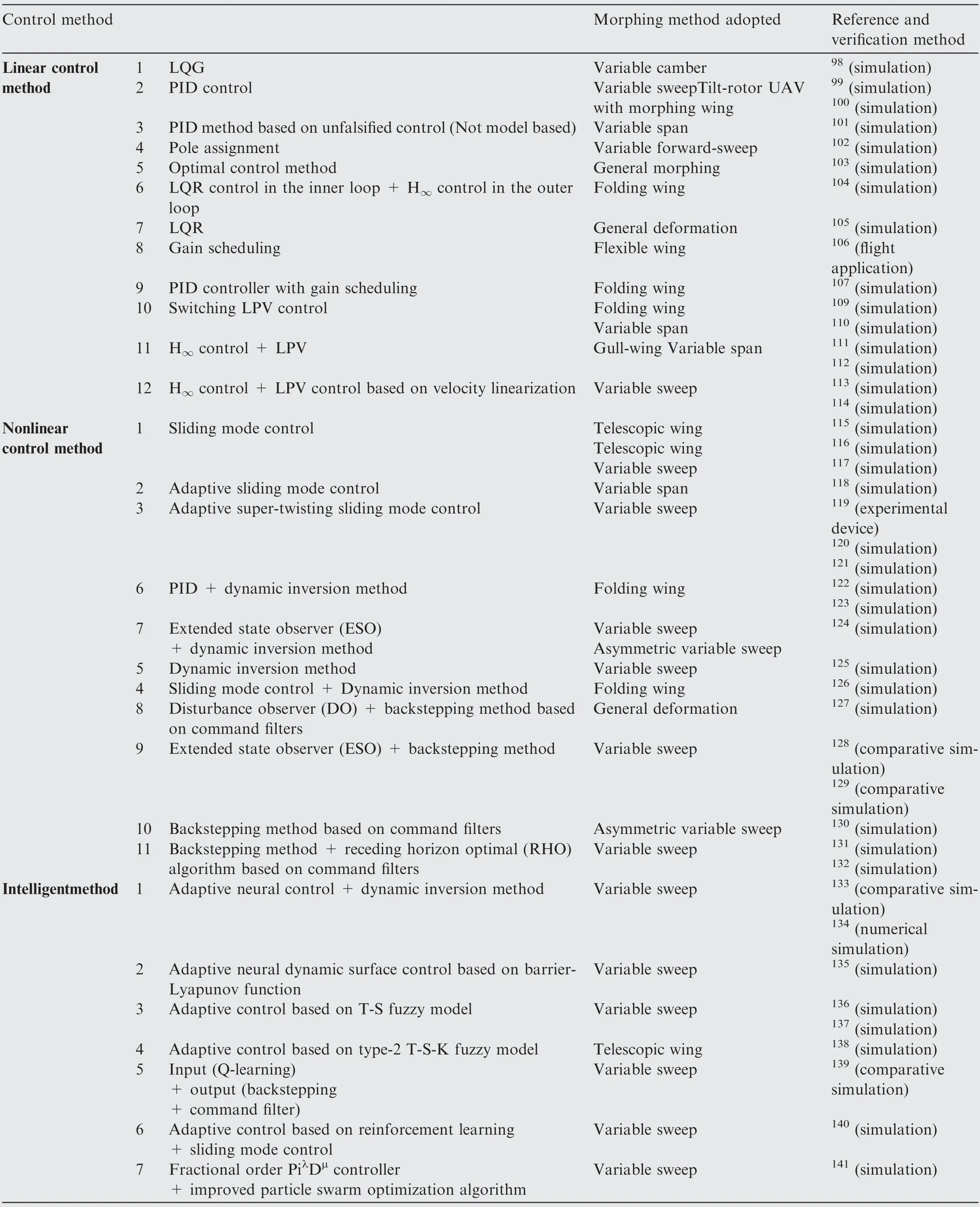
Table 3 Common control methods for morphing aircraft
For a high-aspect-ratio fixed-wing UAV with flexible characteristics, Wang et al.(Dalian University of Technology)designed a time-varying Linear-Quadratic Gaussian (LQG)optimal controller that realized the roll control of the UAV by actively controlling the piezoelectric intelligent materials on the wing.
Based on a 3-DoFnonlinear model of the Firebee variableswept UAV, Yan et al.(Northwest Polytechnic University)designed a classical PID controller with different gains according to six morphing configurations. The simulated controller exhibited good trajectory tracking performance, however,introducing large degrees of morphing will vastly change the UAV’s attitude, altitude, and speed. Cetinsoy(Istanbul University in Turkey) developed a hybrid aeroelectric fourtilt-rotor UAV with morphing wings. Based on the Newton-Euler equation of hybrid coordinates, the UAV dynamic model, including the aerodynamic characteristics of the morphing wing, propulsion system, actuator, and airframe, was constructed. Furthermore, a hierarchical control system based on a PID controller was used to manipulate the roll transition and morphing processes. Yao(Nanjing University of Aeronautics and Astronautics) proposed a new digital PID parameter-adaptive controller based on unfalsified control to study the cruise and dive flight modes of a morphing aircraft.Su et al.(Northwest Polytechnic University) considered the problem of the lack of dynamic stability in variable forwardswept-wing aircraft. They developed the lateral heading dynamic model of a delta wing using the small disturbance theory and designed the lateral heading augmentation control system based on the pole assignment method. The simulation results proved that the control law enabled the system to quickly meet the expected dynamic characteristics and stability requirements. For a class of morphing aircraft with a variable main-wing position,Yuan(Nanjing University of Aeronautics and Astronautics)transformed the nonlinear model into a linear time-varying system using the small disturbance theory at a selected reference point.By selecting an appropriate number of subsystems,he established a linear time-varying optimal controller for the local linear subsystem and fulfilled the purpose of tracking the reference trajectory. With the foldingwing aircraft as the research object, Yan(Nanjing University of Aeronautics and Astronautics) adopted the Linear-Quadratic Regulator (LQR) controller in the inner loop and the Hrobust adaptive control law in the outer loop.The simulation results demonstrated the robust performance of the control law. Bai and Dongdesigned the variant process of a variant vehicle into a linear switched system.Each linear subsystem was controlled with the LQR controller. According to the switching law, the controller was switched between adjacent controllers. The Firebee morphing aircraft was used as the object of simulation. Consequently, the switching control system exhibited good performance.
The linear controller can only ensure the state stability of the nonlinearly controlled object near some equilibrium points but not the global stability of the whole flight process.To solve this problem, researchers have developed robust gainscheduling controllers to realize the full envelope and full mode control of the unsteady system.
5.1.2. Gain scheduling
For a class of nonlinear dynamic systems, the gain-scheduling method has strong adaptability and robustness,which includes the traditional gain-scheduling method, LPV-based robust gain-scheduling method, etc.
The traditional gain-scheduling method linearizes the nonlinear system at typical operating points and designs linear controllers accordingly. The linear controller family can be combined through interpolation to control the whole nonlinear system. Puyou and Berard(Airbus France) proposed a gain-scheduling method for flight control. The method was based on observer state feedback and a stable interpolation technique for existing controllers. It can be applied to flexible civil aircraft with multiple scheduling parameters. For example,Shao et al.(Northwestern Polytechnic University)combined the conventional PID controller with a gain-scheduling strategy and designed a linear controller with flight speed and wing folding angle as the scheduling variables. The approach improved the flight control performance and robustness of the folding-wing UAV. Although the conventional gain-scheduling method can control a nonlinear system globally, its success depends on the selection of typical working points,which can only guarantee the local system performance at the working point. Meanwhile, the traditional gainscheduling method is more suitable for a system in which the scheduling variables change slowly. Because the switching dwell time of the controller should be less than the change speed of the dynamic characteristics to ensure that the current controller can effectively stabilize the controlled plant before the next controller works. However, the morphing process of a shape-changing aircraft is fast, which adds uncertainty to the stability and performance of the controller.
Robust gain-scheduling method:The global controller,based on the model of an LPV system, can be designed using dynamic scheduling variables. The global stability of the system can be guaranteed within a predefined range of motion.Leith and Leithead(University of Strathclyde) proposed that the robust variable gain control based on the LPV system is one of the best methods for nonlinear systems.He(Northwestern Polytechnic University)used the parameter-dependent common Lyapunov function method to realize the variation process as fast as possible within the allowable range of speed of the morphing mechanism.Jiang et al.(Beijing University of Aeronautics and Astronautics)designed a smooth switching LPV robust controller considering the gradual change in parameters, and verified its stability and robustness through simulation. Based on the LPV model, Guo et al.(National University of Defense Technology) designed an Hrobust control method based on the state feed forward to realize the attitude control of a European wing aircraft. Based on the non-affine parameter-dependent LPV model, Wen(Beijing University of Aeronautics and Astronautics) designed a class of Hcontrollers based on state feedback.To solve the problem of dependence of the LPV model, which is established using the Jacobian linearization method, on the selection of equilibrium point, Liang et al.(Beijing University of Aeronautics and Astronautics), Zhang(Beijing Institute of Control and Electronics Technology) proposed a robust LPV control method for morphing aircraft based on velocity linearization. The method extended the differential of state variables to the state equation and resulted in an LPV model with a convex polyhedron.The robust LPV controller was designed according to the parameter-dependent robust Hstatefeedback controller and the variable-parameter convex interpolation value. Moreover, the robust attitude control of the variable-sweep aircraft under rapid morphing was realized.From the perspective of control,changes in system parameters leads to changes in its dynamic characteristics near the working point.Furthermore,the LPV control technology can solve problems of parameter changes and inaccurate model descriptions, to improve the dynamic characteristics of the system.
The traditional gain scheduling or LPV-based robust control method is used to solve the nonlinear problem by combining several groups of simple linear control methods, which reduces the complexity of the system design and meets the large-envelope flight characteristics of the morphing aircraft.Hence, it is widely used in morphing aircraft.
Remark 1:Except the LPV method,linear control methods are usually based on a linearized model near the equilibrium point, so the dynamic performance and robustness of controller will be reduced while the state of the controlled object is far from the equilibrium point.
5.2. Nonlinear control method
With respect to the nonlinear characteristics of the morphing process, designing a nonlinear control can effectively improve the control performance.In addition,due to the uncertainty of parameters,and multiple complex disturbances and input constraints of morphing aircraft, a combination of multiple control algorithms is often used to improve the online adaptive ability and robust performance of the system.
5.2.1. Sliding-mode control
The sliding-mode control is a type of special nonlinear control,and the nonlinearity is the discontinuity of control, and the nonlinear performance is the discontinuity of control. The structure of the sliding-mode control is not fixed. In the dynamic process,it can be manipulated by the switching function according to the current state of the system (such as deviation).
Yin et al.(Nanjing University of Aeronautics and Astronautics) studied the problem of robust control for the morphing process of a telescopic-wing aircraft, and proposed a new sliding-mode control strategy that can better ensure the global stability and robust performance of the closed-loop system,eliminate the influence of composite interference,and improve fuel efficiency.Yue et al.(Beijing University of Aeronautics and Astronautics) proposed a 6-DoF, nonlinear, time-varying model and sliding-mode flight controller that used additional asymmetric wing expansion to improve the lateral maneuverability of a tailless telescopic-wing morphing aircraft. Lee et al.(Seoul University of Korea) designed a sliding-mode controller for the longitudinal dynamic model of a variablesweep UAV, which regulated airspeed and altitude and executed command tracking. Zhang et al.(Nanjing University of Aeronautics and Astronautics) proposed an adaptive sliding-mode control algorithm. The external disturbance was divided into matched and unmatched terms. The integral sliding-mode control was designed to eliminate the influence of the matching term on the system, and rematch the mismatched term with the robust performance index. Lyapunov stability proves that the adaptive integral sliding-film control can ensure the stability of the closed-loop system. Shtessel et al.(University of Alabama,United States),Babaei et al.(Malek-Ashtar University of Technology, Iran), Yan et al.(Northwest Polytechnic University) used the adaptive supertwisting sliding-mode control method to track the reference trajectory. The improved sliding-mode control method enhanced the robustness of the system.
The sliding-mode control can be designed independent of the object parameters and disturbances. It offers the advantages of fast response,strong robustness to parametric changes and disturbances, independence from system online identification, and simple physical implementation.
5.2.2. Feedback linearization
The feedback linearization method is a new system (also referred to as the pseudo-linear system) with a linear behavior between input and output. It is obtained using the full state feedback to cancel the nonlinear characteristics of the original system, so that the new system could be comprehensively designed using the linear method.Compared with other methods, the main feature of the feedback linearization method is that it does not depend on the solution or stability analysis of the nonlinear system, but only needs the feedback transformation of the system. There are two forms of feedback linearization methods: differential geometry and dynamic inverse methods. The dynamic inversion method is a comprehensible, more intuitive form of the feedback linearization method. It uses the inverse system of the controlled object to compensate the controlled object into a system with a linear transfer relationship. It then uses the linear system theory to synthesize and control the system.
Shi and Song(Beijing Institute of Technology) and Shi et al.(Beijing Institute of Technology) modeled an inplane morphing aircraft based on the pseudo-coordinate Lagrange method, and designed an improved controller based on dynamic inversion and PID synthesis. The simulation results verified the effectiveness of the dynamic model and controller. Wan(Beijing University of Aeronautics and Astronautics) proposed an attitude stability control method based on dynamic inversion. First, the dynamic inverse controller is designed based on a fixed configuration. Then, regarding the model and parameter changes as interference, and the Extended State Observer (ESO) was adopted for observation and compensation to accomplish the stability control during the morphing process. Li et al.(Beijing University of Aeronautics and Astronautics) designed a nonlinear dynamic inverse controller for the strong coupling and nonlinear characteristics of a morphing aircraft and realized its attitude control. Zhang et al.(Beijing University of Aeronautics and Astronautics) proposed an integrated flight control method based on the sliding-mode control and dynamic inverse control for a folding-wing aircraft.The fast loop controller with strong robustness and rapid response was designed using the slidingmode control, while the slow and outer loop controllers with the corresponding mathematical models were designed using nonlinear dynamic inverse control. The control system exhibited good robustness in the simulation.
The dynamic inversion control method is widely used in different aircraft models and flexibly adapts to the changes of the aircraft model. It can meet even such unconventional control requirements as high angles of attack and super maneuvering.Therefore,the dynamic inversion method offers advantages to the control of morphing aircraft.
5.2.3. Backstepping
In the backstepping method, the complex nonlinear system is decomposed into subsystems that do not exceed the order of the system. Parts of the Lyapunov functions and intermediate virtual control variables are designed for each subsystem, and then returned to the whole system. These functions and variables are integrated to design of the full control law.
For the problem of multiple uncertain interferences to the morphing UAV, Wu et al.(Beijing University of Aeronautics and Astronautics) designed a compound anti-interference controller that improved the flight performance of the morphing UAV. The inertial force and moment were estimated by a nonlinear Disturbance Observer(DO)constructed in the inner loop,and in the outer loop,the stability of the closed-loop system was ensured using Command Filter Backstepping(CFBS).The simulation results show that the system output can rapidly track the reference signal during the UAV’s transformation process. Gong et al.(Beijing University of Aeronautics and Astronautics) studied the disturbance suppression control problem in the longitudinal dynamics of morphing aircraft.The disturbance was estimated by the ESO,and the robustness of the altitude subsystem was controlled using the backstepping method. Furthermore, the modified dynamic surface was introduced in each step of the backstepping method to avoid the complexity explosion problem. Tong and Jiused the backstepping method to solve the nonlinear aerodynamic characteristics introduced by the morphing wing. They also introduced command filters to improve the robustness of the controller to external disturbances. Chen et al.(Northwestern Polytechnic University) and Chen and Feng(Northwestern Polytechnic University) proposed a parallel correction controller scheme. They used the backstepping method to design the basic controller and used the Rolling Horizon Optimization (RHO) method based on a command filter to design the correction controller.The track angle under the controller could effectively track the command signal and meet the real-time and robustness requirements of the control system.
Because of its fast convergence speed, backstepping is suitable for the online control of dynamic systems. Therefore, it has been widely used in aerospace.However,without considering the physical and mechanical constraints of the actual system state and control variables, the designed control law often causes the control surface to saturate and affects the system security.
Remark 2: The nonlinear control algorithm can effectively mitigate the strong nonlinear and coupling problems in a morphing aircraft.Thus, the global stability and robustness of the system have improved. The subsequent introduction of state observation and state feedback further improved the antiinterference and adaptive ability of the system. However, it has a few disadvantages, e.g., most of the nonlinear control algorithms require a more accurate nonlinear model; the design and calculation of the nonlinear system are more complex.
5.3. Intelligent method
Based on the classical control theory, the intelligent control technology is developing gradually, which provides solutions for complex engineering problems.By learning from large volumes of data,the intelligent control algorithm trains and infers the model to obtain a control system with high robustness,which mainly solves the control problems of highly complex nonlinear systems.Intelligent control algorithms include fuzzy control, expert control based on knowledge, neural-network control, and integrated intelligent control.
Wu et al.(Northwest Polytechnic University) proposed an adaptive neural control method for the longitudinal dynamics of a morphing aircraft. The longitudinal dynamics was decomposed into a velocity subsystem and an altitude subsystem. The velocity subsystem was controlled by the neuralnetwork dynamic inverse method,whereas the altitude subsystem was designed with an adaptive neural controller.The control law guarantees the convergence of the tracking error on any small neighborhood near zero through the Lyapunov stability theory.Based on this research,Wu et al.proposed an adaptive neural dynamic surface-control method based on the barrier Lyapunov function to solve the position parameters and input-output constraint problems of the morphing aircraft. Liu(Harbin Institute of Technology) and Zheng(Nanjing University of Aeronautics and Astronautics) established the T-S fuzzy model of a morphing aircraft based on the T-S fuzzy theory, designed a model reference adaptive flight control algorithm, and verified through simulation the ability of the method to suppress external interference. Furthermore, Jiao et al.(University of Waterloo) proposed an adaptive mode switching method for variable wing hypersonic vehicle. For the expansion and contraction process of the wing. First, the nonlinear model was linearized by feedback linearization, then, the sliding-mode control based on the type-2 T-S-K fuzzy logic system was designed to realize the switch smoothly. Simulation results show that the proposed switching control method can achieve the stability and smoothness of mode switching.Gong et al.(Beijing University of Aeronautics and Astronautics)studied a switching control strategy based on Q-learning for a variable-swept aircraft vertical motion. The deformation process is regarded as a function of the system state. After establishing the vertical motion model, the inner-loop-outer-loop-combined controller was designed. The outer loop adopted backstepping and instruction filtering to solve the complexity explosion problem.An ESO was designed to estimate the system disturbance.The Q-learning algorithm for learning the optimal command when the disturbance exists was used in the inner loop.This method keeps all signals of the closed-loop systems bounded and controller switching occurs only once. Based on the multibody dynamic model of a variable-swept vehicle, Yan et al.(Northwest Polytechnic University) proposed a flight control method based on reinforcement learning (Q-learning method with multiple iterations) for wing-shape adaptivedeformation control combined with a sliding-mode controller.Wu et al.(Beijing University of Aeronautics and Astronautics) established a longitudinal dynamic equation with the time-varying parameters of the sweep angle deformation rate,designed a fractional order PIDcontroller, and optimized the controller parameters using the improved particle swarm optimization algorithm. The simulation results show that the fractional order PIDcontroller based on an intelligent algorithm performed better than the traditional PID controller.
Remark 3:In morphing aircraft control,the combination of intelligent algorithms and traditional linear or nonlinear methods obviously improves the response speed, adaptive ability,and robustness of the control system,which is one of the future directions in this field of research.
5.4. Fault-tolerant control
To improve the reliability and safety of an aircraft,its fault tolerance should be considered. When the sensor, actuator, or system structure of the aircraft fails, the aircraft can deal with the fault in time and reconstruct the control system through the active fault-tolerant function. the morphing aircraft has a more complex mechanical structure than the conventional aircraft, including various sensors and actuators.Therefore, during flight, the probability of failure is relatively high. This will not only affect the aerodynamic performance of the aircraft,but also threaten flight safety.
At present, research on the fault-tolerant control of an aircraft is focused on multi-effector aircraft actuator failure or motor failure of multi-rotor and tilt-rotor UAVs. the main methods of fault-tolerant control include linear-quadratic equation, adaptive control, feedback linearization, synovial control, and model predictive control. Eslamdoust et al.(Shahid Beheshti Univ. Iran) proposed a design method for predictive control based on a linear inner membrane. The method includes a fault detection and isolation mechanism and an adaptive reconfiguration mechanism, which realizes the self-reconfigurability of most UAVs. The method was verified based on a UAV system with a known fault elevator.Bani(Concordia University,Canada)studied the controller design problem of a quadrotor UAV, and designed a gainscheduling PID controller for UAV failure. He converted the analog controller into a digital one using the predictive digital redesign method. This solved the fault problem caused by actuator failure. Zhao et al.(Beijing Institute of Technology, China) designed a direct feedback adaptive faulttolerant controller for the uncertainty of the attitude control system of a quadrotor UAV.With the state feedback and state error,the UAV attitude can effectively track the reference system for state output.Wang(Concordia University,Canada)proposed a fault-tolerant control method for aircraft based on sliding-mode control,which is effective in resolving some or all failures on the control surface of a morphing aircraft.The control method can efficiently adapt to the modeling uncertainties and errors,and reallocate the control force in the fault state to realize the autonomous control of actuators as well as redundant actuators. Yang and Jiang(Nanjing University of Aeronautics and Astronautics) proposed a control method for a multiple-control-surfaces aircraft based on the generalized regression neural network, which controls the control allocation of operating surfaces after the fault diagnosis,reduces the use of the fault control surface, and maintains stable flight by controlling the normal control surface. Caliskan and Hajiyev(Istanbul Technical Univ, Turkey) provided a fault diagnosis method for stuck faults through the Kalman filter and second-order Kalman filter, and adjusted controller parameters based on the fault information to achieve the stable control of the system after fault occurrence.
Remark 4: Existing fault-tolerant control methods of aircraft are mostly aimed at the multi-effector aircraft actuator failure or motor failure. However, the morphing aircraft has more sensors and actuators. Therefore, the possibility of system failure increases significantly. Hence, the fault-tolerant control method for a single actuator fault has poor adaptability.Therefore,researchers should develop a fault-tolerant control method for the whole system and detect multilevel faults,to ensure fault diagnosis, isolation, and control reconfiguration in the case of component failure in the morphing wing.This can ensure the basic flight conditions of the aircraft and improve the reliability of the morphing wing.
5.5. Summary of Section 5
All types of control methods can be applied to control a morphing aircraft,with varying degrees of success.However,these control methods have limitations.For example,linear methods are based on the linearized model near an equilibrium point,so it is not possible to achieve full mode and global control. The nonlinear control method is more suitable for the nonlinear system of the morphing wing. However, it depends on the dynamic model, and therefore has higher requirements to achieve model accuracy and low robustness. Meanwhile, it is also computationally taxing, and therefore demands more flight control system resources. The combination of intelligent methods and traditional mechanism control methods can greatly improve the robustness of the system by acquiring data,learning from it,and improving the accuracy of the nonlinear system. Furthermore, incorporating fault-tolerant control can greatly improve the adaptability and system stability of morphing aircraft.
6. Limitations and future direction
Although several advances have been made in the field, the realization, modeling, and control methods for morphing aircraft are still in the development stage, and there are still the following bottlenecks.
6.1. Limited skin material
To realize a practical morphing wing, the driver, deformation mechanism and skin design should meet the morphing requirements of the wing.At present,there are many types of materials and structures used in morphing aircraft, for example:flexible materials, moving mechanisms, and corrugated structure skins, etc. However, those materials and structures are contradictory in weight, bearing capacity and deformation capacity in common. Flexible materials can achieve a high degree of morphing and air tightness,but it has a limited bearing capacity. The moving mechanism has a strong bearing capacity, but cannot guarantee surface smoothness and air tightness of the wing. The morphing capacity of corrugated structure can be controlled, but the structure is bulky and its surface continuity is strongly influenced by ripples. Aircraft deformation is restricted by the intrinsic properties of the material and structures. Therefore, the development of highperformance intelligent materials and structures can effectively promote the development of morphing aircraft. This is currently the future direction of related research.
6.2. Reasonable modeling method considering aeroelasticity
To summarize, existing modeling methods can accurately describe the dynamic characteristics of the morphing aircraft.However,they have limited accuracy and poor dynamic adaptability in the case of high-order and rapidly morphing aircraft.Furthermore, with the introduction of intelligent materials,most shape-shifting aircraft have flexible elastic characteristics.Therefore,no matter the degree of deformation,the morphingwing structure will have aeroelastic characteristics.If the traditional deformed-wing modeling method were adopted, the accuracy of its dynamic model would be reduced and highorder, high-dimensional phenomena would occur. Especially,when the flight environment is time-dependent and uncertain,the aeroelastic problems of the flexible body and complex flow field become more prominent.Therefore,considering the effect of aeroelasticity, to establish a reasonable dynamic model combined with the fluid structure coupling characteristics,which can accurately characterize the nonlinear characteristics of the system without increasing the complexity of the controller, is still the research difficulty in this field.
6.3. Adaptive control problem of highly nonlinear and dynamic morphing aircraft system
The aircraft propels using the reaction force produced by its influence on the surrounding fluid.This indicates that interference with the air flow can affect the external disturbance model and internal mechanism model of the platform simultaneously,which poses challenges to the safe and reliable operation of the aircraft. However, the dynamic characteristics of a morphing aircraft show obvious nonlinear, under-actuated, and timevarying characteristics. These characteristics significantly increase the difficulty of producing an adaptive flight control design. Therefore, it is necessary to analyze the mechanism by which the complex airflow influences the dynamics of a morphing aircraft and combine it with a nonlinear dynamic model to study the control method suitable for a highly dynamic nonlinear system. In addition, due to its fast, timedependent, and strong coupling phenomenon, the controller has high performance requirements. Therefore, researchers should focus on combining intelligent algorithm and conventional control algorithms, and research flight control and behavior planning algorithms with strong adaptability and robustness,to improve the intelligence of the flight control system,and consequently the adaptive behavior of morphing aircraft in a complex environment.
6.4. Active fault-tolerant control for uncertain faults caused by morphing mechanism introduction
The possibility of the failure of a sensor or an actuator in a morphing aircraft is relatively high. The failure mechanism of the deformed-wing aircraft is complex and diverse.Therefore, the traditional fault-tolerant control algorithm for a single fault or a fault with the same mechanism will not work for the morphing aircraft. Therefore, researchers should combine knowledge-, analytical model-, or signal processing-based methods to detect typical and multiple faults and establish the multilayer system fault diagnosis and isolation structure to improve the reliability of fault monitoring further. Due to the limitation of flight control resources, researchers should consider theoretical research within the constraints of practical computing ability at first,and then develop an optimized faulttolerant algorithm for the morphing aircraft, which would have strong real-time performance and a low computing resources footprint.
7. Conclusions
(1) This paper summarizes the current development and configuration design methods of the morphing aircraft and prospects the future development direction and related challenges.
(2) This paper also details the modeling and control methods of the morphing aircraft, and their advantages and disadvantages.
(3) Finally, limitations of the morphing aircraft that must be solved urgently are highlighted.
(4) This study can provide a theoretical and technical reference for the development of morphing aircraft or morphing-wing UAVs.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This study was supported by the National Key R&D Program of China (No. 2018YFC0810102) , the National Natural Science Foundation of China (Nos. 91848203 and 91948202),the State Key Laboratory of Robotics (2020-Z02), and Natural Science Foundation of LiaoNing Province of China(20180520014).