
A novel optimal data fusion algorithm and its application for the integrated navigation system of missile
2022-04-27 08:24:20DiLIUXiyunCHENXioLIU
Chinese Journal of Aeronautics 2022年5期
Di LIU, Xiyun CHEN,❋, Xio LIU,b
a Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology Ministry of Education, School of Instrument Science and Engineering, Southeast University, Nanjing 210096, China
b School of Electronic and Information Engineering (Department of Physics), Qilu University of Technology, Jinan 250353, China
KEYWORDS Data fusion;High-degree cubature Kalman filter;Integrated navigation;Non-Gaussian noise;Process-modeling error
Abstract For Inertial Navigation System (INS)/Celestial Navigation System (CNS)/Global Navigation Satellite System (GNSS) integrated navigation system of the missile, the performance of data fusion algorithms based on the Cubature Kalman Filter (CKF) is seriously degraded when there are non-Gaussian noise and process-modeling errors in the system model. Therefore, a novel method is proposed,which is called Optimal Data Fusion algorithm based on the Adaptive Fading maximum Correntropy generalized high-degree CKF(AFCCKF-ODF).First,the Adaptive Fading maximum Correntropy generalized high-degree CKF(AFCCKF)is proposed and used as the local filter for the INS/GNSS and INS/CNS subsystems to improve the robustness of local state estimation. Then, the local state estimation is fused based on the minimum variance principle and highdegree cubature criterion to get the globally optimal state. Finally, the experimental results verify that the proposed algorithm can significantly improve the robustness of the missile-borne INS/CNS/GNSS integrated navigation system to non-Gaussian noise and process modeling error and obtain the global optimal navigation information.
1. Introduction
The navigation system is essential in the missile, which is one of the basic equipment for the missile to hit the target precisely.Therefore, the missile-borne navigation system must meet the characteristics of high reliability and precision.Currently,there are two main ways for researchers to improve the accuracy of the missile-borne navigation system: one is the construction of the navigation system, and the other is the design of the navigation information fusion filter.For the construction of the navigation system, Inertial Navigation System (INS) has strong autonomy, but it has the disadvantage that error accumulates over time.At present, Global Navigation Satellite System (GNSS) is usually used as an external auxiliary device of the INS, which has high measurement precision for position and velocity with no accumulation error, but its output information is discontinuous and susceptible to interference. Together with the INS, it forms an INS/GNSS integrated navigation system that can achieve complementary advantages and improve the overall performance significantly.However,this integrated navigation system still has the disadvantages of low efficiency and poor accuracy of attitude error estimation, and GNSS is prone to signal loss.Celestial Navigation System (CNS) calculates the attitude through the starlight information observed by the star tracker,which can be combined with INS to achieve highprecision attitude measurement,but the estimation accuracy of velocity and position errors is poor.Therefore, combining INS, CNS, and GNSS to construct the INS/CNS/GNSS integrated system can realize each subsystem to have complementary advantages.Now,INS/CNS/GNSS integrated navigation has become a popular navigation scheme in missile, highaltitude aircraft, etc.
Information fusion filter is necessary for the integrated navigation systems to achieve good performance. Generally, Kalman filtering techniques for data fusion of INS/CNS/GNSS integrated system are split into centralized Kalman filter and decentralized Kalman filter.The centralized Kalman filter can give the optimal estimation of the state error, but it has the disadvantages of large computation, high state dimension,and poor fault tolerance. The decentralized Kalman filter,especially the Federated Kalman Filter (FKF) and its improved algorithms, overcome the shortcomings of centralized Kalman filter and are widely used in multi-sensor data fusion. FKF uses the two-stage structure with the sub- and main filters to achieve state estimation according to the information sharing principle.Hu and Huangproposed an Unscented Kalman Filter (UKF)-based FKF, which uses UKF as the sub-filter and then realizes the fusion of the estimated of the sub-filters through the federated structure. However, this method uses the variance upper bound technique to make each sub-filter uncorrelated,resulting in the fact that the global state estimation is sub-optimal. Besides, when the process model contains errors or the observation noise is non-Gaussian, the performance of the UKF-based FKF will be seriously degraded.For the limitations of the method proposed in Ref.,Gao et al.proposed a data fusion algorithm for INS/GNSS/CNS system based on UKF and minimum variance principle to get the globally optimal state. However,when the process model contains errors and the observation noise is non-Gaussian, this method still cannot achieve the desired performance. For suppressing the impact of the process-modeling error on filtering estimation, many adaptive filtering methods were proposed.Li et al.proposed a robust UKF algorithm, which combines the Masreliez-Martin UKF with the fading factor to adjust the covariance of process noise adaptively. Based on the same idea, an adaptive fading UKF is shown in Ref.,which is used as the local filter to restrict the impact of the process-modeling error on local filtering estimation. In Ref., a robust adaptive UKF algorithm was proposed, which combines the previously and currently estimated noise covariance through the weight coefficient to reduce the effect of the process-modeling error. The problem that the filter-based fusion algorithm has poor robustness to non-Gaussian noise has also attracted the attention of scholars.Currently, there are many filtering algorithms to suppress non-Gaussian noise, including Huber-based filter,Student’s t filter,particle filter,Gaussian sum filter,filtering methods based on Maximum Correntropy Criterion(MCC), and so on. Especially, the filtering methods based on MCC are proposed in recent years. These methods use MCC to modify the measurement update process and obtain good robustness against non-Gaussian noise.Hou et al.proposed a maximum correntropy UKF algorithm, in which the unscented transformation and MCC are used to approximate the nonlinear system and suppress the effect of non-Gaussian noise, respectively. To further improve the performance of the filtering algorithm,Chen’s team proposed a Maximum Correntropy Generalized High-degree Cubature Kalman Filter (MCGHCKF). The algorithm uses the highdegree cubature rule to approximate state probability distribution,and observation noise variance is updated by introducing the MCC.
The above algorithms can only solve one or two of the problems that (A) the state estimation caused by using the variance upper bound technique is not optimal; (B) the process-modeling errors affect the performance of the fusion algorithm; (C) the performance of the fusion algorithm seriously degrades under non-Gaussian noise. To our knowledge,there is currently no Kalman-based data fusion algorithm that can handle the above three problems simultaneously. However, because the system model of the missile-borne INS/CNS/GNSS integrated system constructed is approximated theoretically to the real model, errors are unavoidable. And the measurement devices of the missile-borne navigation system are affected by the external environment,and its measurement noise is usually non-Gaussian.Therefore,it is necessary to study an algorithm that can deal with the above three problems simultaneously. Therefore, based on the previous work,we propose the Optimal Data Fusion algorithm based on the Adaptive Fading maximum Correntropy generalized highdegree Cubature Kalman Filter (AFCCKF-ODF). In AFCCKF-ODF, a novel filter called AFCCKF is first derived based on MCC and fading factor and used as the filter for the INS/CNS and INS/GNSS subsystems to improve stability of substate estimation to the process-modeling errors and non-Gaussian noise. Then,the substate estimation is fused according to the fifth-order cubature criterion and the minimum variance to obtain the optimal state.
In general, the major contributions of the paper include the following: (A) The AFCCKF algorithm with good robustness against process-modeling errors and non-Gaussian noise is proposed, and the stability of the AFCCKF algorithm is analyzed in depth. (B) Based on the AFCCKF algorithm, the AFCCKF-ODF algorithm is proposed, and the global optimal state estimation can be obtained. (C) In the missile-borne INS/CNS/GNSS integrated navigation system experiment, the superiority of the proposed algorithm is verified.
The outline of the rest of this paper is as follows.AFCCKF-ODF algorithm is derived in Section 2. The effectiveness of the proposed algorithm is proved by simulation experiments in Section 3. The conclusions are drawn in Section 4.
2. Optimal data fusion algorithm based on AFCCKF
As an autonomous navigation system, INS has high output frequency and high navigation accuracy in a short time. Generally,the INS serves as the core navigation system,and other navigation systems assist it in improving accuracy and reliability. Therefore, INS/CNS/GNSS integrated navigation system described in this paper consists of two subsystems: INS/CNS and INS/GNSS. And inspired by Ref., the framework of AFCCKF-ODF takes the form shown in Fig. 1. The AFCCKF-ODF is composed of local state estimation and global state estimation.In local state estimation,the AFCCKF is proposed and used as the filter of the INS/CNS and INS/GNSS subsystems to suppress the influence of processmodeling error and non-Gaussian noise.In global state estimation, the optimal state is obtained according to the minimum variance principle and high-degree cubature rule.
2.1. Local state estimation
2.1.1. Derivation of AFCCKF
To be able to suppress the influence of process-modeling error and non-Gaussian noise simultaneously in the local state estimation of INS/CNS and INS/GNSS subsystems,a novel filtering algorithm AFCCKF based on MCC and adaptive fading factor is derived.
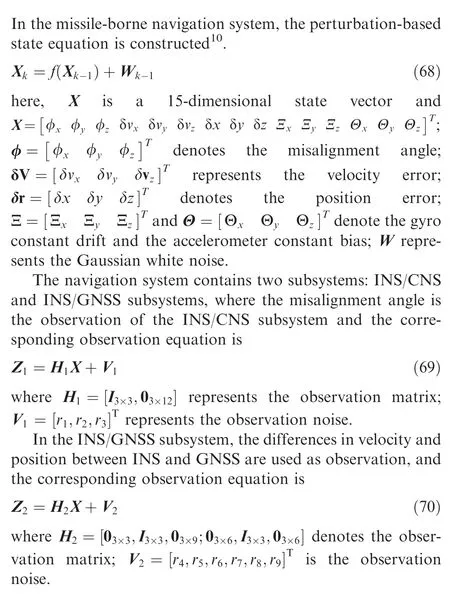
In the INS/CNS/GNSS integrated system, the state equation is Eq. (1), and the measurement equations of the subsystems are uniformly written as Eq. (2).
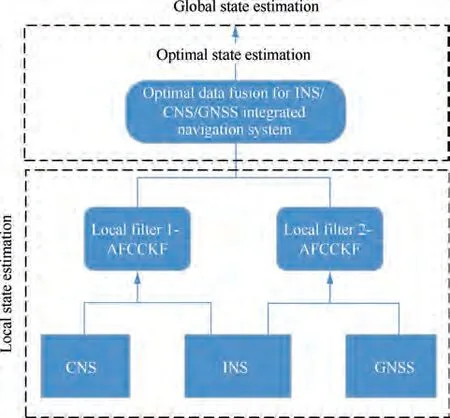
Fig. 1 Basic framework of AFCCKF-ODF.
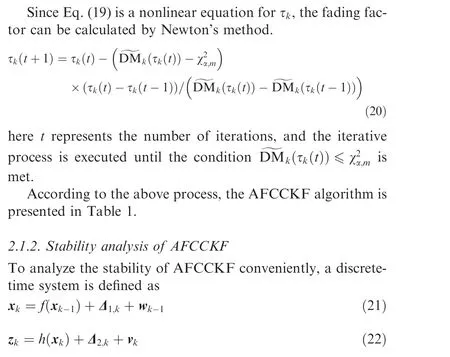
where Δand Δrepresent process-modeling error and non-Gaussian noise, respectively. If the system does not contain process-modeling error and non-Gaussian noise, then both Δand Δare 0. wand vdenote independent Gaussian noise, and their variances are Qand R, respectively.

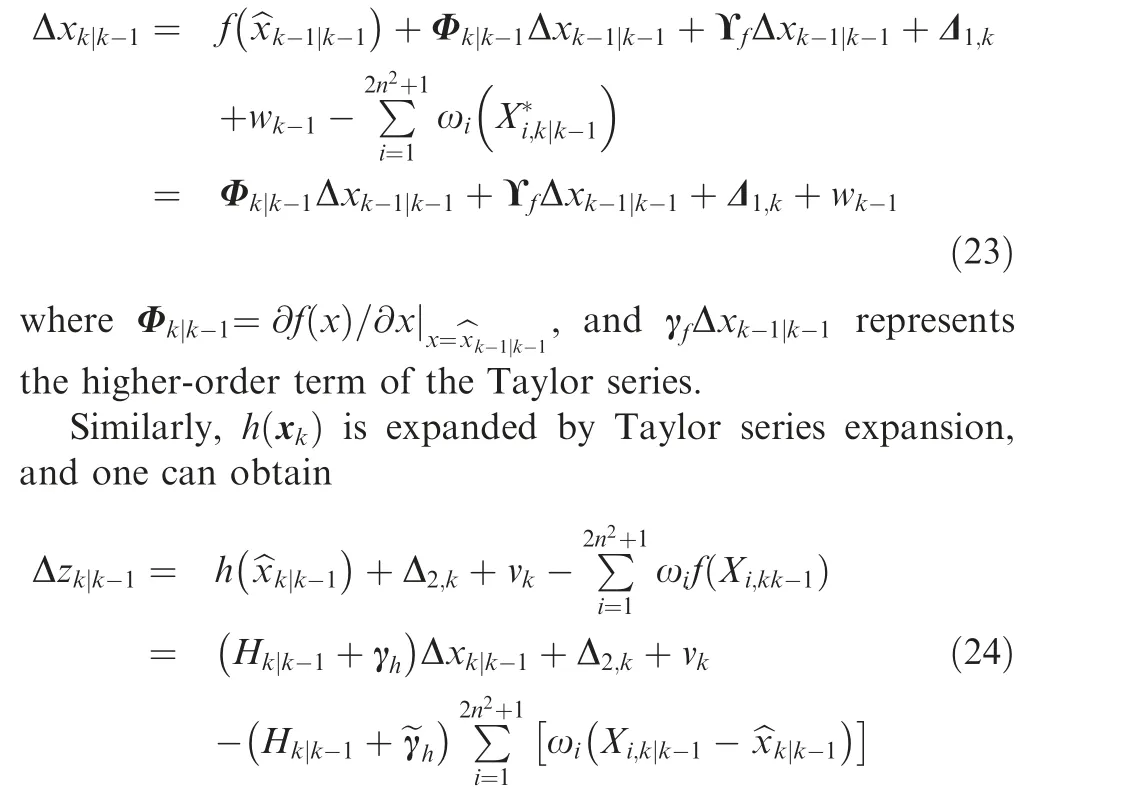
where H=∂h(x )/∂x|^x, and γand ~γrepresent the matrix used to describe the nonlinear truncation error of the measurement model in the case of the real state and the estimated state, respectively.
Therefore, Δxcan be expressed as
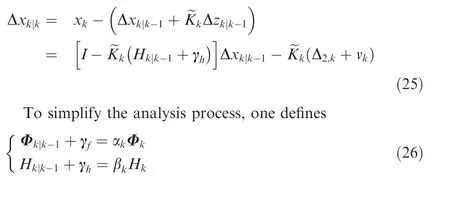
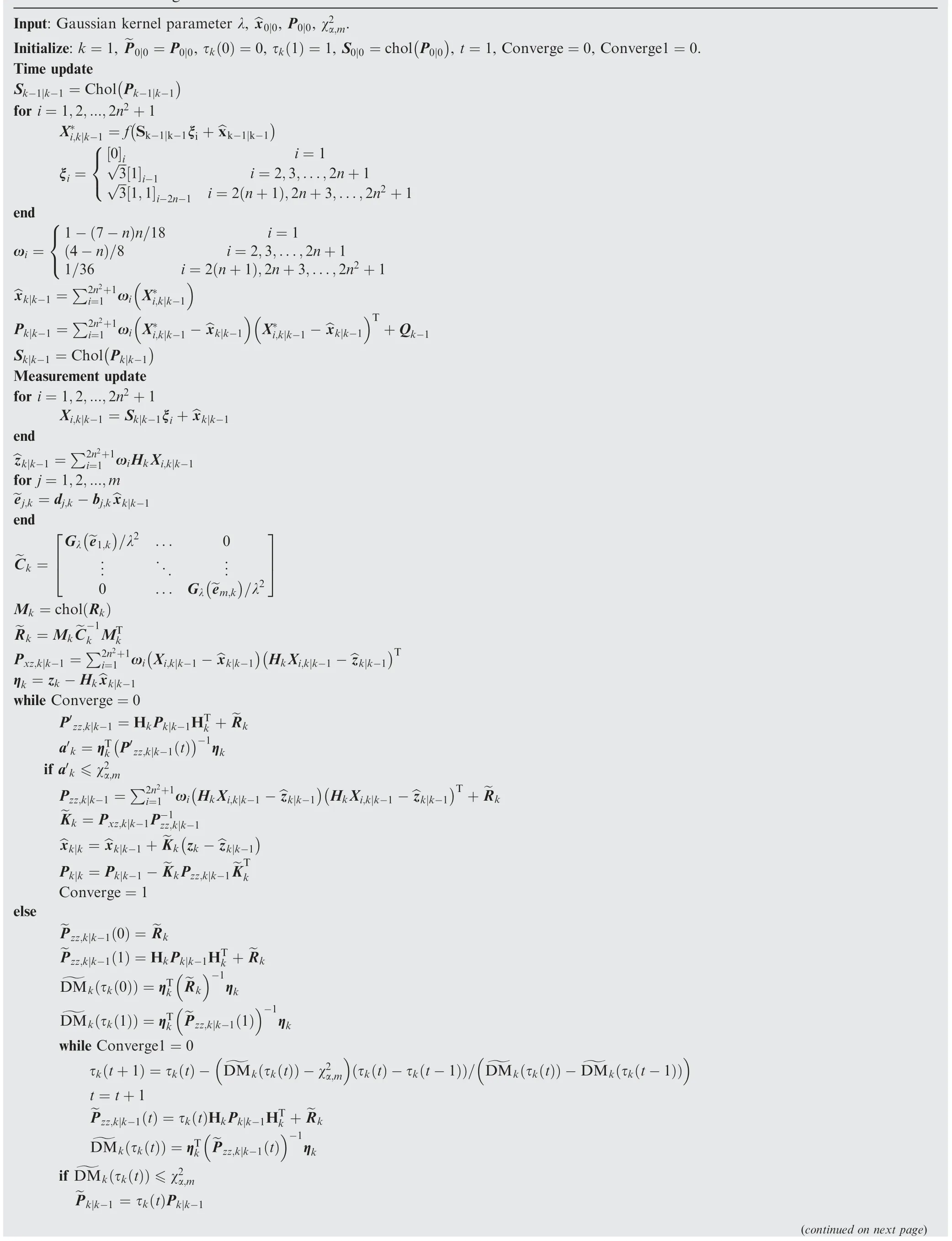
Table 1 AFCCKF algorithm.
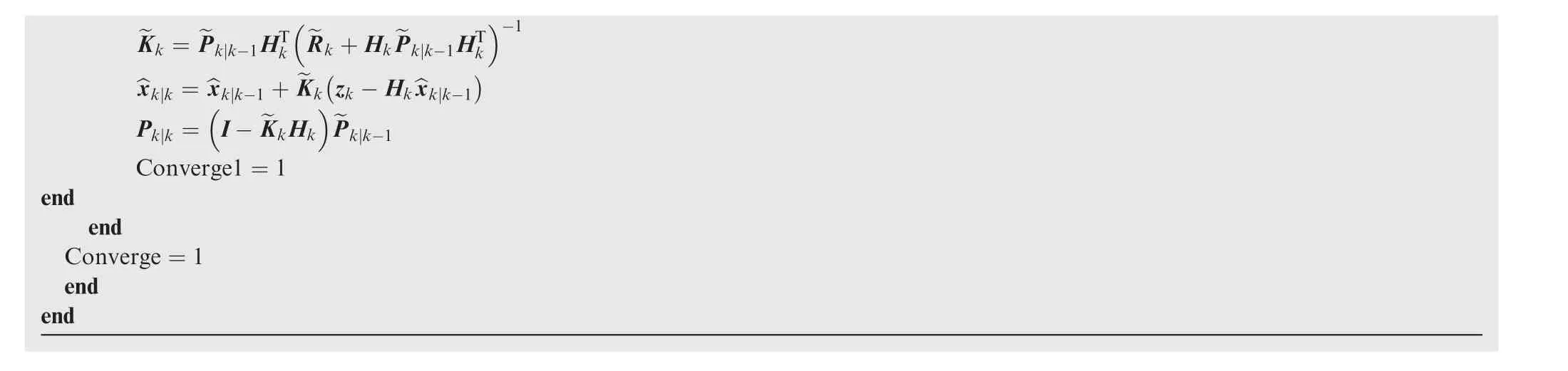
■■-1~Kk = ~Pk|k-1HTk ~Rk+Hk~Pk|k-1HT(k^xk|k = ^xk|k-1+ ~Kk zk-Hk^xk|k-1)■■~Pk|k-1 Converge1=1 end end Converge=1 end end Pk|k = I- ~KkHk
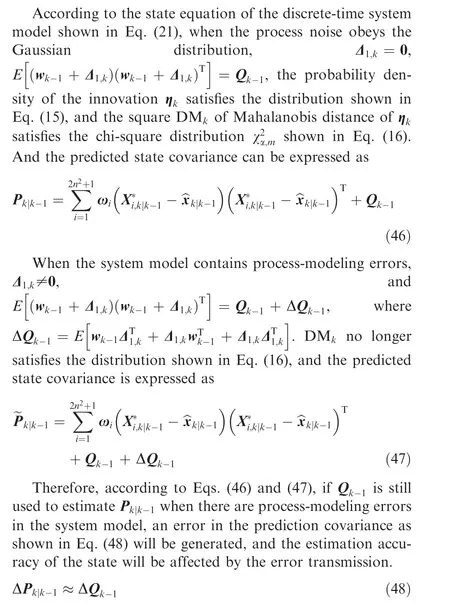
Therefore, to eliminate the influence of process-modeling errors on state estimation,the fading factor τis used to adjust the predicted covariance ~P= τP, so that DMsatisfies the distribution as shown in Eq. (16).
2.2. Global state estimation
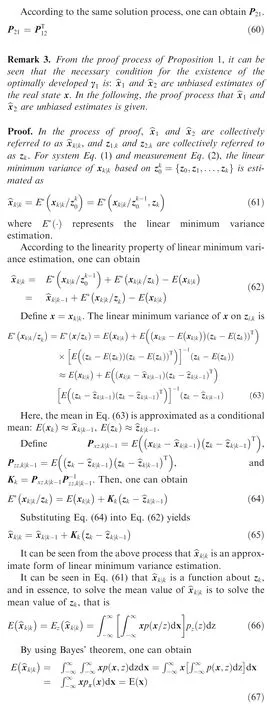
INS/CNS and INS/GNSS subsystems perform local state estimation in a parallel manner according to the AFCCKF algorithm shown in Table 1. To distinguish the state estimate ^xand covariance matrix Pof INS/CNS and INS/GNSS subsystems, we define the state estimates obtained by INS/CNS and INS/GNSS subsystems as ^x, ^x, and the corresponding covariance matrix as P, P, respectively. In this section,according to the minimum variance principle and the highdegree cubature rule, the state estimates of each subsystem are fused to get the optimal value.
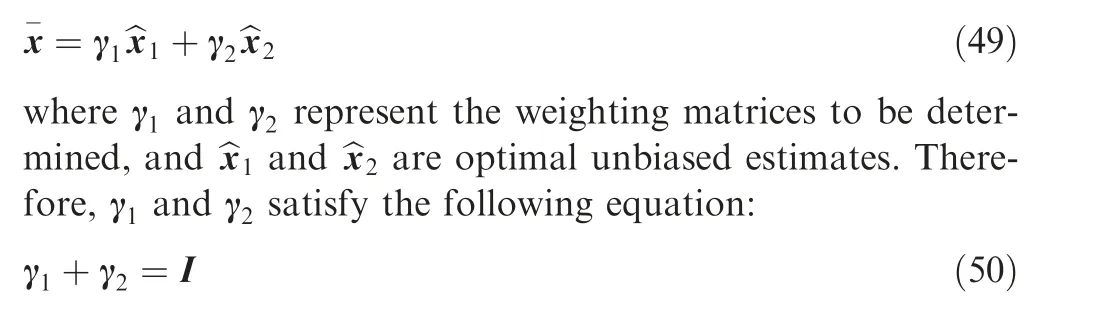
According to the local state estimates ^x, ^xof the INS/CNS and INS/GNSS subsystems and the corresponding covariance matrices P, P, the global state estimate obtained can be expressed as



3. Simulation experiment
In this section,the AFCCKF-ODF algorithm is applied to the INS/CNS/GNSS integrated simulation system of the missile.First,the missile-borne navigation system model is introduced.Then, in the case that the process model contains errors and the observation noise is non-Gaussian, the effectiveness of AFCCKF-ODF in the missile-borne navigation system is evaluated.
3.1. INS/CNS/GNSS integrated navigation system model of missile
3.2. Performance of AFCCKF-ODF algorithm in INS/CNS/GNSS integrated navigation system of missile
In the case that the process model contains error and observation noise is non-Gaussian, the effectiveness of the proposed algorithm is presented through Monte Carlo simulation experiments. And in this case, the value of the Gaussian kernel parameter λ in the proposed algorithm is set to 5.
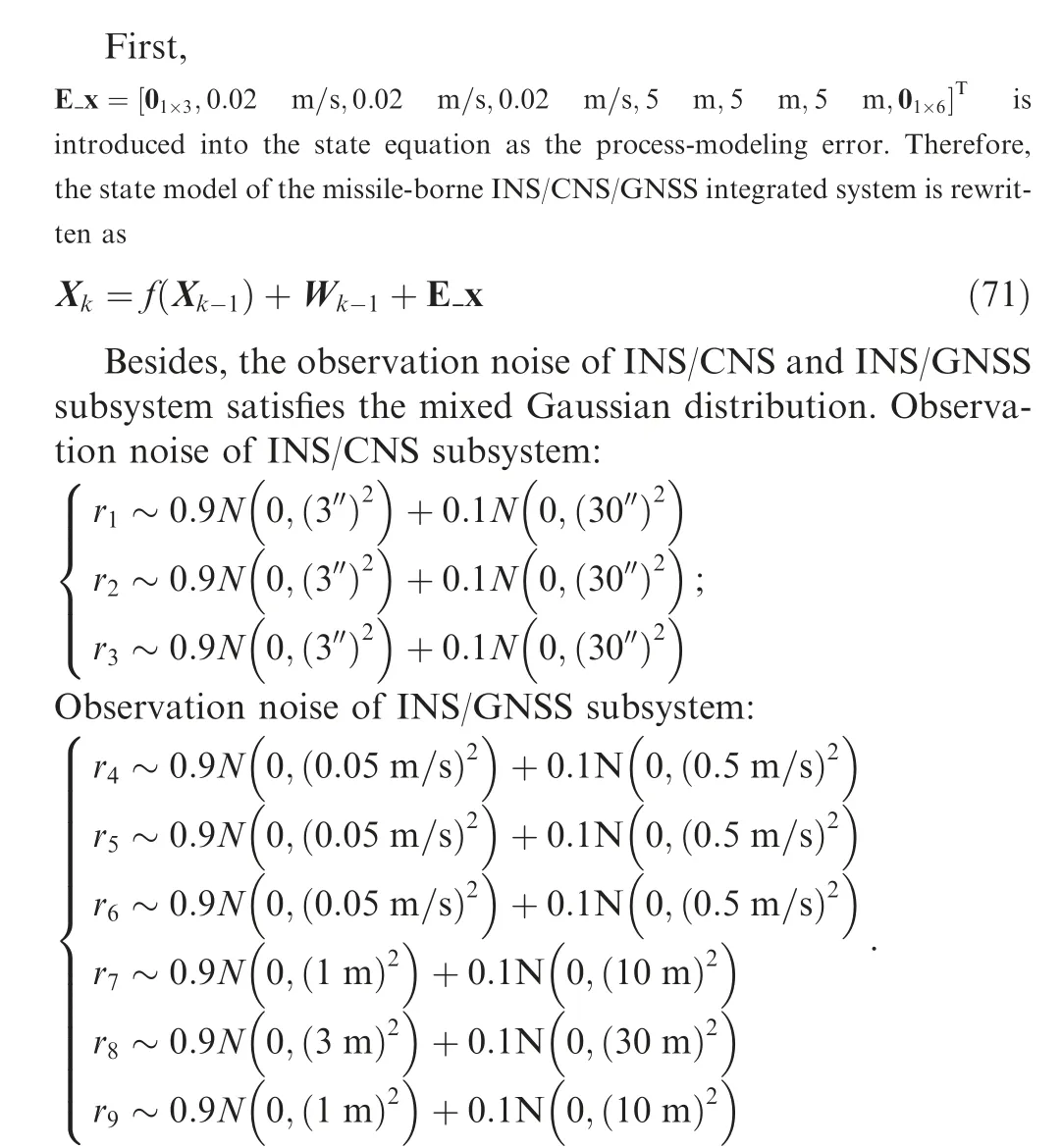

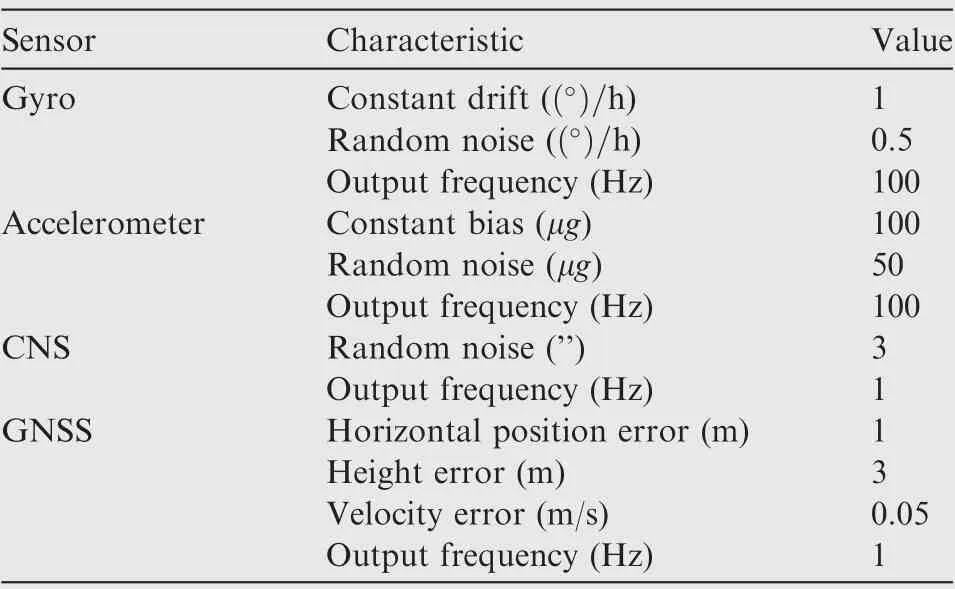
Table 2 Characteristic parameters of each sensor.
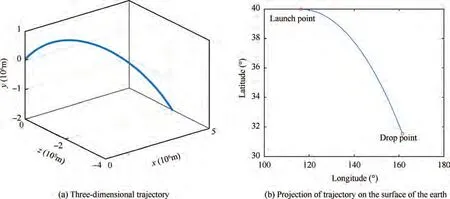
Fig. 2 Flight trajectory of missile.2
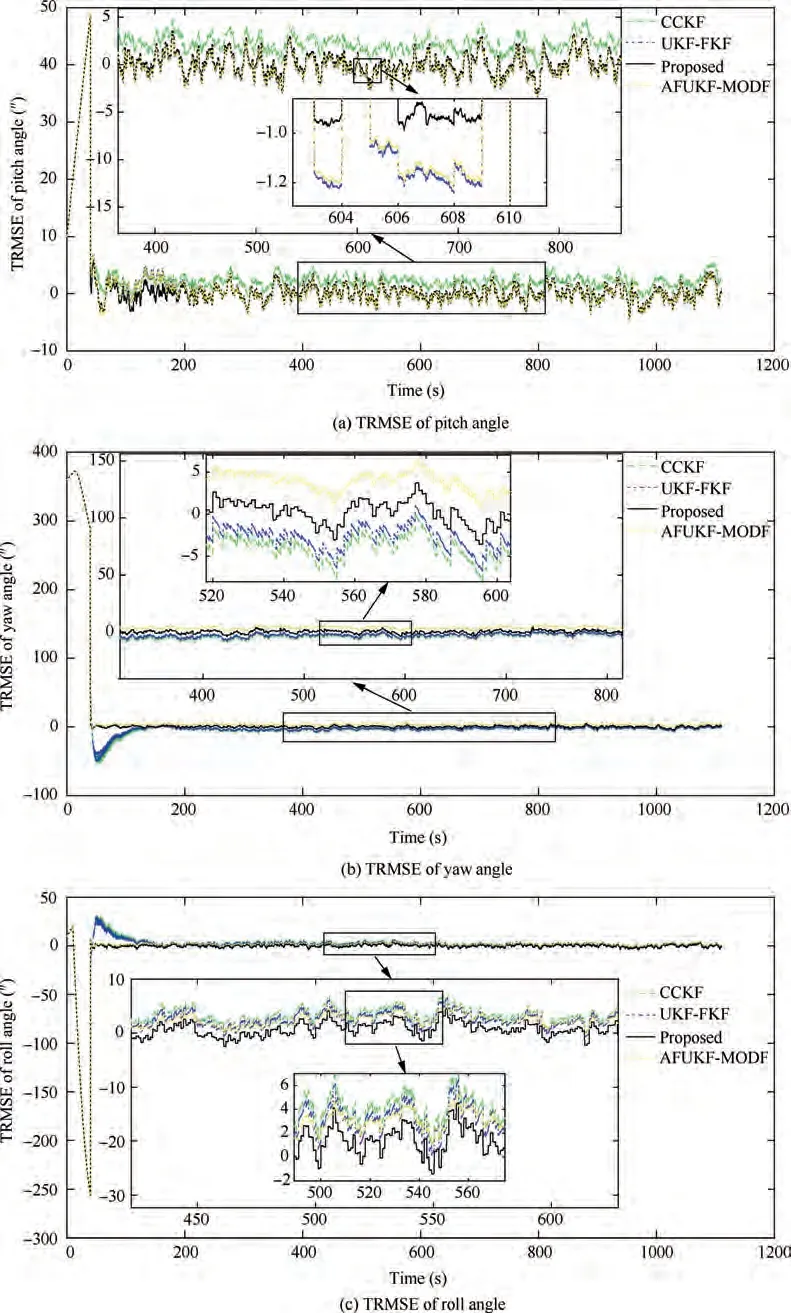
Fig. 3 TRMSEs of attitude when the process model contains errors and observation noise is non-Gaussian.
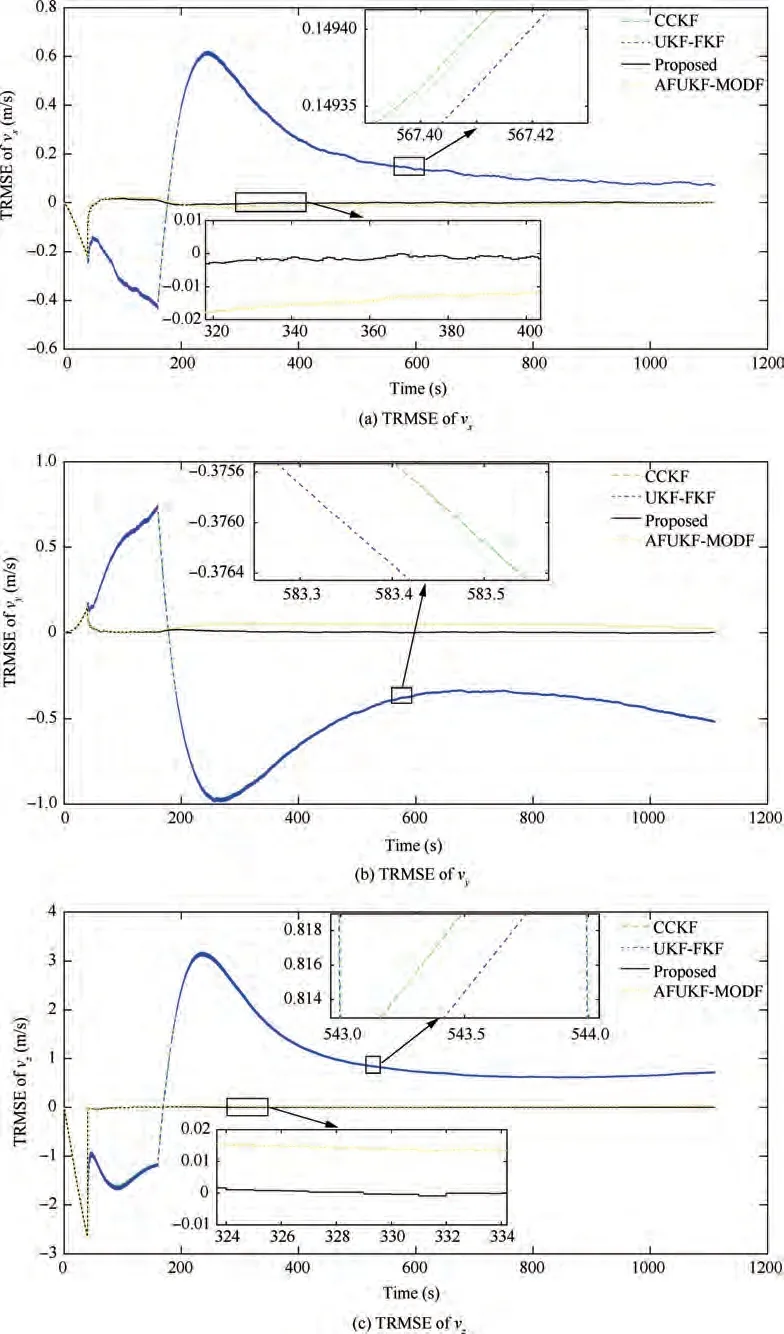
Fig. 4 TRMSEs of velocity when the process model contains errors and observation noise is non-Gaussian.
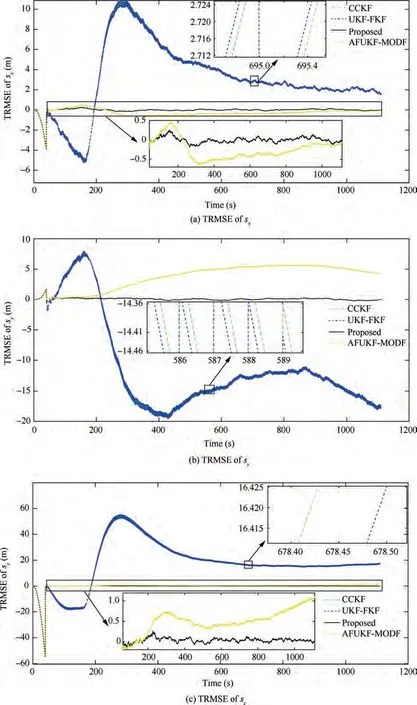
Fig. 5 TRMSEs of position when the process model contains errors and observation noise is non-Gaussian.
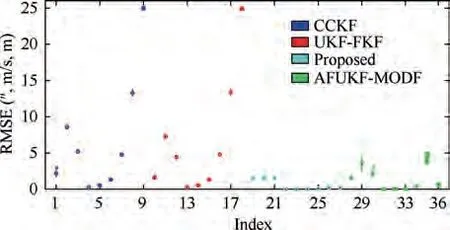
Fig. 6 Box plot of RMSEs when the process model contains errors and observation noise is non-Gaussian.

Table 3 RMSEs of attitude when the process model contains errors and observation noise is non-Gaussian.
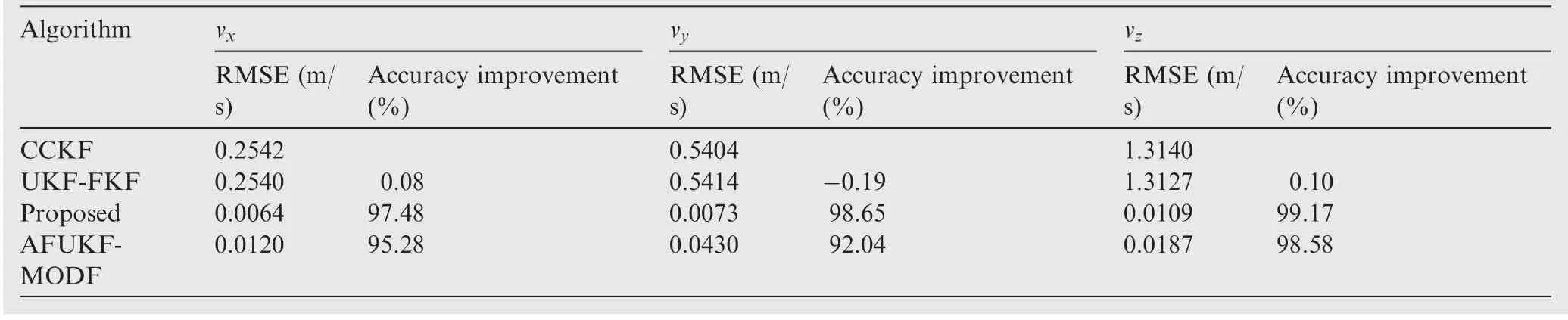
Table 4 RMSEs of velocity when the process model contains errors and observation noise is non-Gaussian.
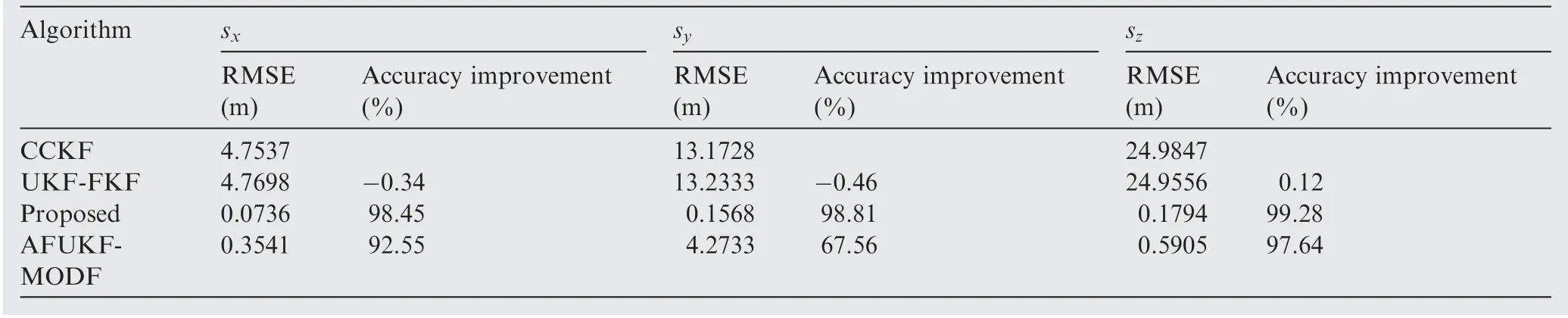
Table 5 RMSEs of position when the process model contains errors and observation noise is non-Gaussian.
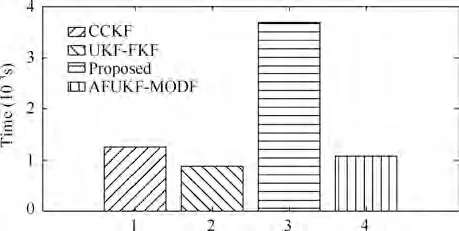
Fig. 7 Histogram of the time consumed by one filtering period when the process model contains errors and observation noise is non-Gaussian.
4. Conclusions
In this paper, an optimal data fusion algorithm called AFCCKF-ODF for the missile-borne INS/CNS/GNSS navigation system is proposed, and the following conclusions are drawn:
(1) In local state estimation, the adaptive fading factor and MCC are introduced to improve the robustness of the proposed algorithm against the process-modeling errors and non-Gaussian noise.
(2) In global state estimation, the local state estimates are fused according to the minimum variance principle and high-degree cubature rule to get the optimal state estimate.
(3) In the INS/CNS/GNSS navigation simulation experiments of the missile, the proposed algorithm is compared with other algorithms, including AFUKFMODF,CCKF,and UKF-FKF algorithms.The experimental results show that, compared with the CCKF algorithm, the proposed algorithm improves the attitude, velocity, and position accuracy by more than 35.40%, 97.48%, and 98.45%, respectively.
(4) In future research, the proposed algorithm can be improved from two aspects, one is how to set the value of the Gaussian kernel parameter λ adaptively, and the other is to reduce the complexity of the algorithm.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This study was supported by the National Natural Science Foundation of China (Nos. 61873064 and 51375087), the Transformation Program of Science and Technology Achievements of Jiangsu Province(No.BA2016139)and the Postgraduate Research & Practice Innovation Program of Jiangsu Province (No. KYCX18_0073).