
Stability characteristics and airworthiness requirements of blended wing body aircraft with podded engines
2022-04-27 08:21:14LixinWANGNingZHANGHailiangLIUTingYUE
Chinese Journal of Aeronautics 2022年6期
Lixin WANG, Ning ZHANG, Hailiang LIU, Ting YUE
School of Aeronautics Science and Engineering, Beihang University, Beijing 100083, China
KEYWORDS Airworthiness;Blended wing body;Podded engine;Relaxed static stability;Stability characteristics
Abstract Blended-Wing-Body (BWB) aircraft have a relatively short fuselage and no horizontal tail, and they usually adopt podded engines and a V tail instead of a vertical tail. Generally,BWB aircraft have decreased longitudinal and directional static stability and damping. In this paper, the three-axis static and dynamic stability characteristics of an example BWB aircraft with podded engines are studied. According to the differences in flight characteristics of BWB aircraft and conventional aircraft, the different airworthiness requirements for BWB aircraft are analyzed:first, based on current airworthiness regulations and transport aircraft flying quality specification,the relaxation requirement of longitudinal static stability for BWB aircraft is studied; second, the influences of podded engines on longitudinal trim,attitude and trajectory responses and maximum directional control power requirement of BWB aircraft are analyzed;third,the changes in the proportional relationships between the takeoff characteristic speeds of the example BWB aircraft are analyzed. In view of these variations in directional control power requirement and relationships between takeoff characteristic speeds, new recommendations for airworthiness evaluation are proposed for BWB aircraft. The conclusions of this paper are helpful references for configuration design, flight control law design and airworthiness evaluation of BWB aircraft.
1. Introduction
Blended-Wing-Body (BWB) layout is a new type of aircraft configuration that has an appearance between the flying wing and the conventional ‘tube and wing’ aircraft. The highly blended wing and fuselage can provide some amount of lift;hence, BWB aircraft have a larger lift-to-drag ratio than conventional aircraft. Compared with flat-shaped flying wing aircraft, BWB aircraft have a more obvious fuselage and larger available internal storage space, which is convenient for passenger or cargo transportation. Therefore, BWB aircraft have obvious advantages over conventional aircraft in terms of economy, comfort, and environmental protection.
Since BWB aircraft eliminate the horizontal tail and use a small-area V tail instead of a vertical tail, the longitudinal and directional static stability of the aircraft is significantly reduced.The pitch and yaw damping of BWB aircraft is small,and the aerodynamic and stability characteristics are strongly coupled. Second, due to the short fuselage length, the control effectiveness of the pitch control effectors and the V tail is relatively low.In addition,to reduce noise emissions and alleviate the interference of engine jet flow on the rear flow field of the aircraft, the engines are usually mounted on top of the rear fuselage, and the variation in thrust will have a significant impact on the aircraft longitudinal motion.
There have been many studies on BWB aircraft, including studies on the economy and environmental protection,conceptual design,and aerodynamic configuration design;however,few works have analyzed the aircraft flight characteristics.Castro analyzed the trimming and modal characteristics of a conceptual BWB aircraft. Suaces evaluated the control power requirements for a BWB aircraft based on typical flight missions of civil aircraft. Roysdon and Mahmood analyzed the lateral-directional closed-loop stability and handling characteristics of a business jet-class BWB aircraft at takeoff and landing phase using six-degree-of-freedom flight simulation.Jung and Lowenberg analyzed the trim characteristics of a long-range BWB aircraft during cruise flight, and evaluated the flying quality level of longitudinal and lateral-directional modals using flying quality specifications for military aircraft. Stalens and Blackwelder analyzed the influence of belly-flaps on the handling characteristics of a BWB aircraft during takeoff and landing. It is obvious that previous researches mainly focused on the calculation and analysis of the airframe stability and handling characteristics of BWB aircraft. The differences in the flight characteristics of BWB aircraft and conventional aircraft have not been analyzed and summarized, and it is not discussed whether the existing airworthiness regulations for conventional civil aircraft are still applicable to the evaluation of the flight safety of BWB aircraft if these differences are considered.
In this paper, the BWB400 aircraft—a BWB aircraft with podded engines—is taken as an example for flight characteristics analysis, which is consistent with the example aircraft in Ref. 6. For more background information about this example aircraft, it is recommended to refer to Ref. 7. The rest of this paper is organized as follows. First, the variations of the three-axis static and dynamic stability characteristics of the BWB aircraft are analyzed by comparison with those of conventional aircraft of the same tonnage. Second, based on civil aircraft airworthiness regulations and flying quality specifications for transportation aircraft, the relaxation requirements of the static stability margin for BWB aircraft are studied.Then,the influences of the thrust variation of the podded engines on the longitudinal attitude trim and the dynamic responses of attitude and trajectory are studied quantitatively by the Digital Virtual Flight (DVF) method. Besides, the maximum directional control power requirement of BWB aircraft with podded engines is calculated,which is different from that of the conventional aircraft,and new recommendation for airworthiness evaluation is proposed according to the changes in directional handling characteristics. Finally, through the comparative study with conventional aircraft, the variation in the numerical relationships between the takeoff characteristic speeds of BWB aircraft is analyzed,and its compliance with the existing airworthiness regulations for civil aircraft is studied.
2. Stability characteristics
2.1. Configuration features
The configuration and control surface layout of the 400-seat BWB400 aircraft is plotted in Fig. 1, and its configuration parameters are compared with those of the B747 aircraft in Table 1.
Through a comparative analysis with conventional aircraft,the configuration features of BWB aircraft are summarized as follows:
(1) Large reference area and long Mean Aerodynamic Chord (MAC)Since the wing and fuselage of BWB aircraft are highly blended, the whole wing body becomes a large lift surface. Hence, the projected area of the whole airframe is generally used as reference area for aerodynamic calculation and analysis, whereas conventional aircraft use the equivalent wing area as reference area. According to Table 1, the reference area of BWB aircraft is much larger than that of similar conventional aircraft.Due to the large reference area,the MAC of BWB aircraft is also much longer(generally 2-3 times longer) than that of conventional aircraft.
(2) Relatively small pitch axis moment of inertiaDue to the relatively short longitudinal fuselage and the blended wing and body combination, the inertial properties of BWB aircraft are significantly different from those of conventional aircraft. Table 1 compares the normalized three-axis moments of inertia by the pitch axis moment of inertia for the BWB400 and B747 aircraft. For the B747 aircraft, the comparison results show that the roll axis moment of inertia is the smallest, and the yaw axis moment of inertia is the largest. However, for the BWB400 aircraft, the large aspect ratio and short fuselage result in a significant reduction in the pitch axis moment of inertia, whereas the moments of inertia around the roll and yaw axes are increased.
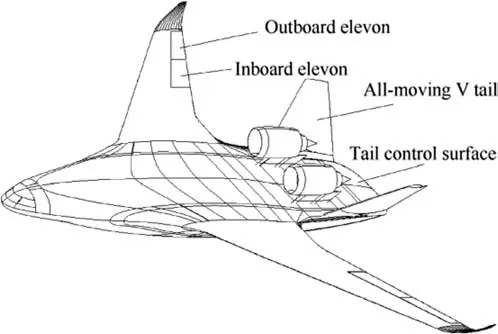
Fig. 1 Configuration and control surface layout of BWB400 aircraft.

Table 1 Comparison of configuration parameters.
(3) High redundancy of control surfaces and the arrangement of podded enginesThe rear fuselage of the BWB400 aircraft is equipped with a tail control surface for pitch control.The rear edge of the wing has two sets of elevons:the outboard elevons are mainly used for roll control, whereas the inboard elevons are used for secondary pitch and roll control. An all-moving V tail is used for directional stabilization and control. The control surfaces of BWB aircraft are more redundant than those of conventional aircraft. Besides, to alleviate the interference of engine jet flow on the flow field of the rear fuselage and improve the directional stability,BWB aircraft usually adopt podded engines.
2.2. Longitudinal stability
For a longitudinal statically stable aircraft, two conditions need to be simultaneously satisfied to achieve trimmed flight:C>0 and C<0.Since BWB aircraft lacks horizontal tail,it can only satisfy the trimmed flight conditions through proper design of the whole aircraft platform. A typical BWB aircraft generally consists of three parts: the central body,the wing-body transition part and the wing.To satisfy the constraints of storage requirements and deck angle less than 3°during cruise flight, the central body airfoil of BWB aircraft usually adopts a trailing-edge reflexed airfoil design. The trailing-edge reflexed airfoil can ensure that the whole aircraft has C>0, but the central body is statically unstable, which means C>0.Thus,the transition part and the wing need to adopt a sweep and twist design to adjust the position of the Aerodynamic Center (AC) to achieve C<0 for the whole aircraft.
A wing with a sweep and twist design can move the AC backward to a certain extent. However, without the rearward adjustment function of the horizontal tail, the AC position of a BWB aircraft is still relatively forward.Thus,the adjustable range of the longitudinal static stability margin of a BWB aircraft is small, which is not beneficial for achieving C<0 and trimmed flight.
When the full projection area is used as the reference area,the calculated aerodynamic derivatives of the BWB400 aircraft are relatively small. Hereinafter, to reasonably compare the aerodynamic parameters with those of conventional aircraft,the aerodynamic derivatives of the BWB400 aircraft under typical cruise flight condition (Ma = 0.85, H = 12 km) are converted using the equivalent wing areaas the reference area.Table 2 compares the longitudinal static stability derivativesof the BWB400 and B747 aircraft. This table shows that the longitudinal static stability margin of the BWB400 aircraft is relatively small and is only approximately 3/5 of that of the B747 aircraft.
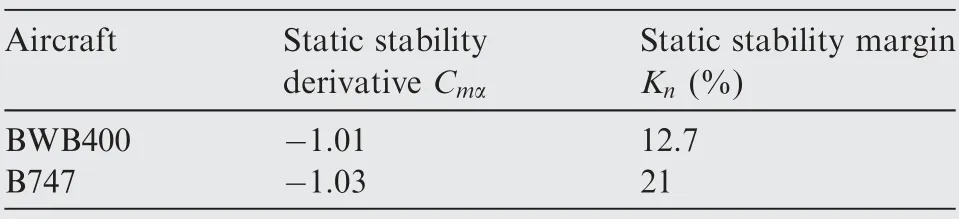
Table 2 Comparison of longitudinal static stability derivatives during cruise flight
For conventional aircraft, the horizontal tail provides the greatest contribution to the pitch damping moment, whereas other components,such as the wing and fuselage,provide very small contributions.The central body of a BWB aircraft forms a large lift surface,and part of the lift surface aft of the Center of Gravity (CG) can act as a horizontal tail and provide some pitch damping.In Table 3,the pitch damping derivative Cof the B747, BWB400 and FW-Haircraft are compared. The BWB400 aircraft has a relatively small pitch damping moment due to the short fuselage, and its pitch damping derivative is only 1/6 of that of the B747 aircraft but is still larger than that of the FW-H aircraft, which is a pure flying wing.
Table 4 compares the longitudinal modes of the BWB400 and B747 aircraft during cruise flight. According to the comparison results, the short-period mode frequency of the BWB400 aircraft is approximately twice that of the B747 aircraft, and the short-period mode damping of the two aircraft are close, but the phugoid mode of the BWB400 aircraft has two real roots and is dynamically unstable.
According to Table 2, the longitudinal static stability derivatives Cof the BWB400 and B747 aircraft during cruise flight are very close.Nevertheless,due to the short longitudinal fuselage and small pitch axis moment of inertia, the shortperiod mode frequency of BWB400 aircraft is still relatively high. The divergence of aircraft phugoid mode is permitted in airworthiness requirements, but it is necessary to ensure that the divergent motion is still controllable in the situation of control system degradation or failure.
2.3. Lateral-directional stability
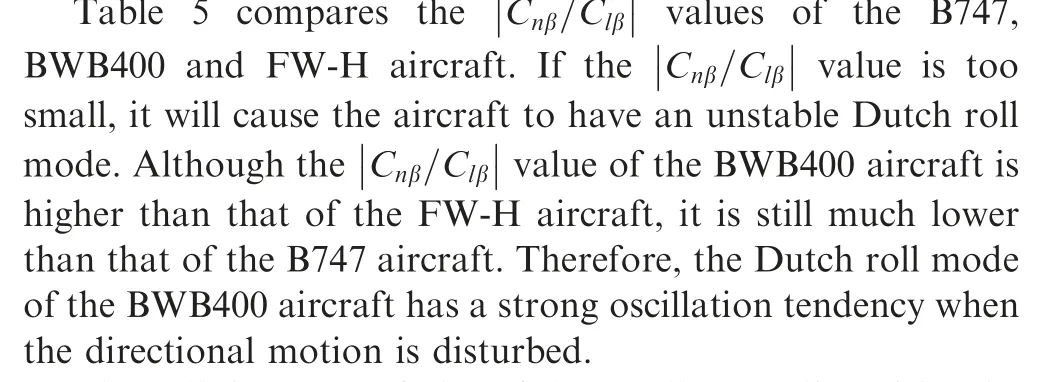
The lateral static stability of conventional aircraft is primarily contributed by the wing body combination and vertical tail.The wide wing body combination of BWB aircraft is beneficial for lateral static stability; hence BWB aircraft have good lat-eral static stability, which is not substantially different from that of conventional aircraft. As shown in Table 5, the lateral static stability derivative Cof the BWB400 aircraft is close to that of the B747 aircraft.
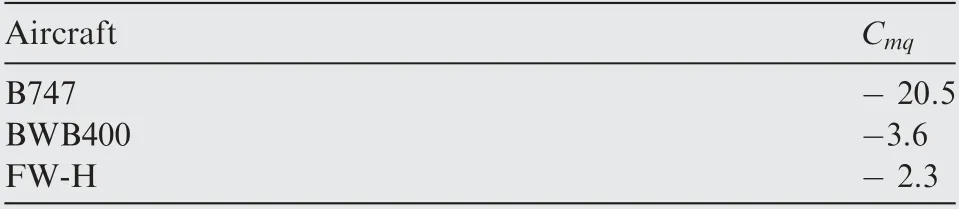
Table 3 Comparison of longitudinal damping derivatives during cruise flight

Table 4 Comparison of longitudinal modes during cruise flight
For conventional aircraft, the vertical tail is the most important component that provides side force and directional stabilizing moment, and the fuselage has a relatively small influence on directional stability. As for BWB aircraft, the V tail provides most of the contribution to directional static stability.However,due to the small area and short longitudinal lever arm of the V tail, BWB aircraft cannot achieve the same degree of directional static stability as conventional aircraft.As shown in Table 5, the static stability derivative Cof the BWB400 aircraft is only approximately 2/5 that of the B747 aircraft.
The roll damping of aircraft is usually contributed by the wing, horizontal tail and vertical tail. Due to the elimination of the horizontal tail, the roll damping derivative Cof BWB aircraft is mainly contributed by the wing, and the contribution of the V tail is relatively small. As presented in Table 6, Cof the BWB400 aircraft is close to that of the B747 and FW-H aircraft due to the large wingspan and wing area.
The yaw damping derivative Cof conventional aircraft is mainly contributed by the vertical tail and wing body combinations, of which the vertical tail contributes approximately 80% - 90% of the total yaw damping of the aircraft. The yaw damping of the BWB400 aircraft is mainly provided by the V tail, but the V tail is small in area and short in the lever arm, which cannot provide sufficient damping moment. As shown in Table 6, Cof the BWB400 aircraft is only approx-imately 1/4 that of the B747 aircraft but is still much higher than that of the FW-H aircraft.
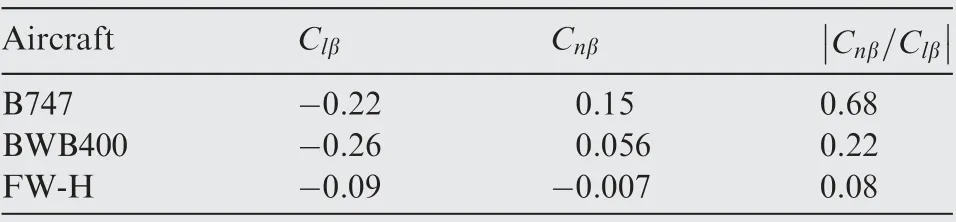
Table 5 Comparison of lateral-directional static stability derivatives during cruise flight
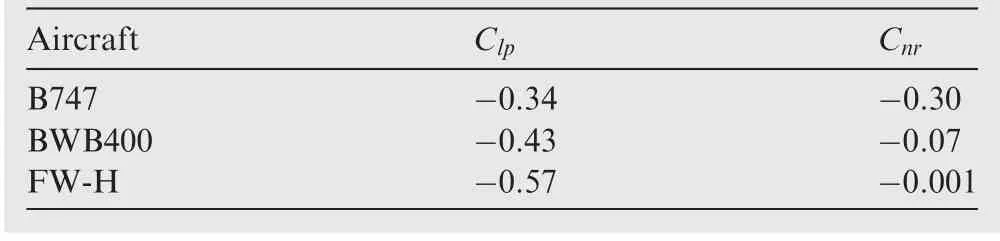
Table 6 Comparison of lateral-directional damping derivatives during cruise flight
Table 7 compares the lateral-directional modes of the BWB400 and B747 aircraft under cruise flight condition. The roll and spiral modes of the BWB400 aircraft are relatively close to those of conventional aircraft, but the Dutch roll mode characteristic is poor, and its dynamic frequency and damping are significantly lower than those of conventional aircraft.
For conventional aircraft,the vertical tail provides most of the stabilizing moment Nand damping moment Nfor the Dutch roll mode.However,for the BWB400 aircraft,the directional stability and damping moments provided by the V tail are much smaller than those provided by the vertical tail. In addition, the yaw axis moment of inertia of BWB aircraft is large, which results in small Nand N. Thus, the frequency of Dutch roll mode is very low, and the damping is small. In view of the poor Dutch roll mode of BWB aircraft,it is necessary to increase the directional damping through a stability augmentation system to obtain satisfactory lateral-directional closed-loop dynamic characteristics.
3. Requirements for relaxed static stability
According to the airworthiness regulations and the design requirements of transport aircraft, during cruise flight, civil aircraft must be longitudinally statically stable while a small instability level of speed is acceptable, which means that the divergence of phugoid mode is permitted. For conventional aircraft that does not adopt relaxed static stability design,during cruise flight, the phugoid and short-period modes are all dynamically stable. However, the phugoid mode of BWB400 aircraft is divergent during cruise flight, and it is necessary to determine the cause of phugoid mode divergence. Besides, to obtain ideal flight performance, the static stability margin of BWB aircraft needs to be relaxed under the constraints of the phugoid and short-period modal characteristics.

Table 7 Comparison of lateral-directional modes during cruise flight
3.1. Cause of phugoid mode divergence
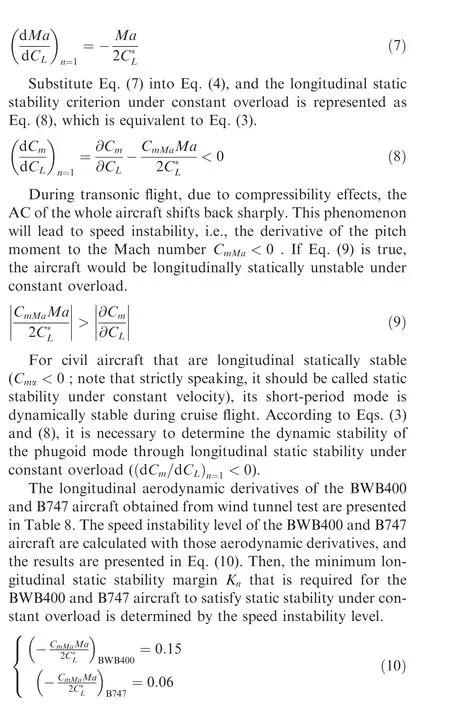
According to the Routh-Hurwitz criteria and aircraft longitudinal fourth-order linear model,the condition for dynamically stable short-period and phugoid modes is

where g is the gravity constant, Zand Zare the derivatives of normal force to Angle of Attack(AOA)and velocity respectively, and Mand Mare the derivatives of pitch moment to AOA and velocity respectively. Replacing the derivatives in Eq.(1)with dimensionless aerodynamic derivatives,the above equation is equivalent to
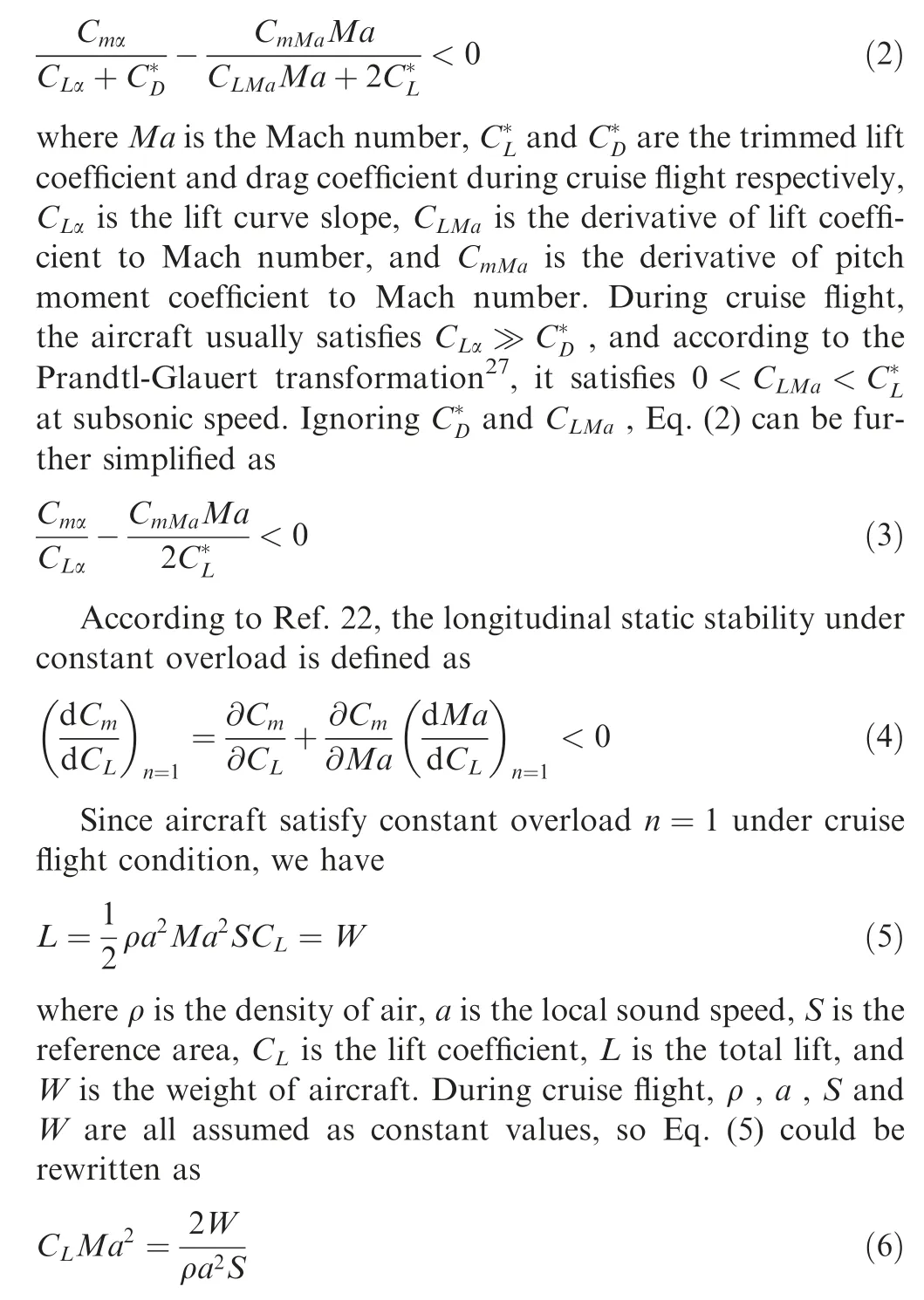
Differentiating both sides of Eq. (6), we can obtain
As shown in Eq. (10), the static stability under constant overload for the BWB400 aircraft during cruise flight is greatly affected by C, and Kneeds to be greater than 15% to ensure longitudinal static stability under constant overload.According to Table 2, Kof the BWB400 aircraft is 12.7%,so the BWB400 aircraft is statically unstable under constant overload; hence, its phugoid mode is unstable.
For the B747 aircraft,when Kis greater than 6%,it is statically stable under constant overload.According to Table 2,Kof the B747 aircraft during cruise flight is 21%; hence, Chas less influence on its static stability under constant over-load. The aircraft is statically stable under constant overload,and thus, its phugoid mode is dynamically stable.

Table 8 BWB400 and B747 aircraft’s longitudinal aerodynamic parameters during cruise flight
3.2. Relaxation requirements for longitudinal static stability
For the divergent phugoid mode due to relaxed static stability margin, it is required that the time to double amplitude of the divergent eigenvalue should be no less than 6 s. When the static stability margin is relaxed, the short-period mode characteristic of the aircraft will also degrade.However,airworthiness regulations for civil aircraft do not have any quantitative requirement for the short-period mode. Referring to the Control Anticipation Parameter (CAP) criteria in flying quality specifications for transportation aircraft, the flying quality level of the bare airframe of transport aircraft under cruise flight condition should not be lower than level 2; hence, the lower bound for the short-period mode can be determined.Based on the above constraints, the requirements of Relaxed Static Stability (RSS) for civil aircraft are summarized in Table 9.
According to the requirements in Table 9, the minimum static stability margin that can be relaxed for the BWB400 and B747 aircraft are calculated. For the BWB400 aircraft,when the stability margin Kis relaxed to 3.9%,CAP=0.07 , and the eigenvalues of the short-period mode still satisfy the constraint in Table 9, but the divergent eigenvalue of the phugoid mode is λ=0.116 , which does not satisfy the constraint for the phugoid mode. Hence, the static stability margin Kshould not be further relaxed.
For the B747 aircraft, when the stability margin Kis relaxed to 5%, the divergent eigenvalue of the phugoid mode is λ=0.0282 , but CAP=0.039 , which just satisfies the constraint for the short-period mode. Hence, the stability margin Kcannot be further relaxed.
In summary,the phugoid mode of BWB400 aircraft has relatively fast divergence speed due to C, which is the main factor that limits the relaxation of static stability. The minimum static stability margin that can be relaxed for B747 air-craft is mainly determined by the short-period mode constraint.
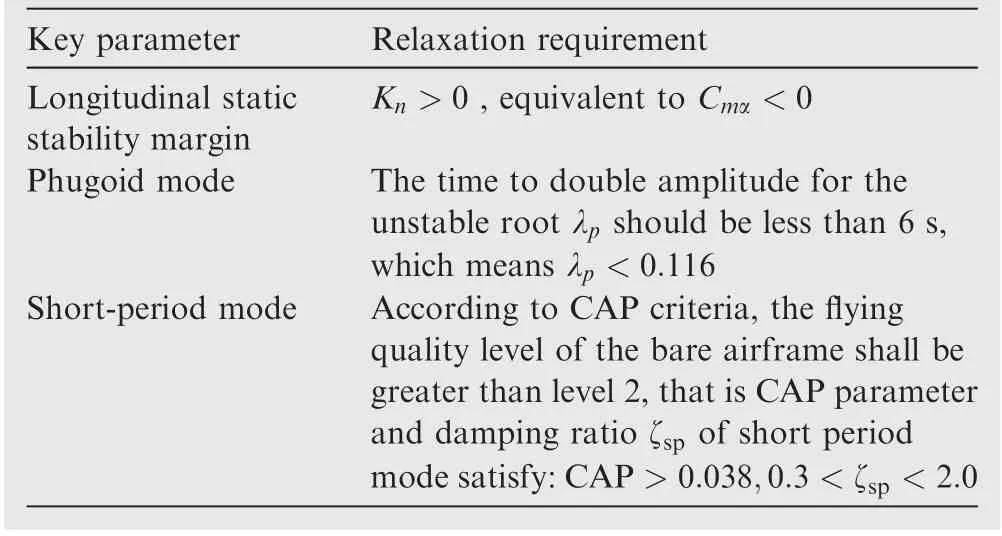
Table 9 Requirements for RSS
4. Variation of handling characteristics due to podded engines
Due to the podded engine arrangement, the thrust line of the BWB400 aircraft is above the CG. Once the engines begin to operate, the thrust will produce a large pitch-down moment,which has a significant impact on the longitudinal dynamic characteristics of the aircraft. During different flight missions,such as takeoff,landing and cruise,the engines need to operate with different modes; hence, the influences on longitudinal motion have some distinct differences. However, thrust variation primarily affects the longitudinal trim and dynamic responses.In addition,due to the small distance of the podded engines, the maximum directional control power requirement of the aircraft after one engine fails is also significantly different from that of conventional aircraft.
4.1. Influence on longitudinal trim
The thrust of the podded engines varies greatly during different flight missions, so the required control deflections to trim the pitch-down moment of the thrust are also quite different.Table 10 shows the pitch-down moment coefficients of the thrust and the corresponding trim deflections of the BWB400 aircraft under typical flight conditions. This table also shows the total longitudinal attitude trim deflections that are required to balance the longitudinal zero-lift moment, the stabilizing moment and the pitch-down moment of the thrust.
As shown in Table 10,in the takeoff phase, when the engines operate with full thrust, the pitch-down moment of the thrust is the largest, and due to the low airspeed, the control effectiveness of the pitch control effectors is very low; hence,a large control deflection is required to trim the pitch attitude.A large control deflection will reduce the longitudinal maneuverability of the aircraft and increase the difficulty of completing the takeoff rotation maneuver. Under this condition, the pitch trim deflection is relatively large and close to saturation.During cruise flight, the pitch-down moment of the thrust is small, and the control effectiveness of the pitch control effectors is high;hence,the required trim control deflection is small.In the approach and landing phases,the engines operate in the idle state, the pitch-down moment of the thrust is also small,and the required trim deflection is only slightly larger than that for cruise flight.
4.2. Influence of thrust variation on longitudinal dynamic response
The pitch-down moment generated by the podded engines varies with the throttle control, which will change the attitude of the aircraft, and then the variation in attitude will affect the flight trajectory. During takeoff and cruise flight, the throttle position is usually fixed, the variation in thrust is very small,and it has little influence on the longitudinal motion of the BWB400 aircraft. During the landing phase, the airspeed is low and decreases slowly;hence,the thrust variation has stronger influence on longitudinal motion than other flight states.To quantify the influence of the podded engines on longitudinal motion during landing flight, using the aerodynamic dataof the BWB400 and B747 aircraft in the landing configuration and simplified engine models, landing control laws with the same control structure are designed for the two aircraft.When designing the control laws, the engine dynamics of the two aircraft are simplified to first-order transfer function,and the time constant is set to 2 s. The maximum available thrust for the engine models is determined by the thrust-toweight ratio of the two aircraft in the landing phase.
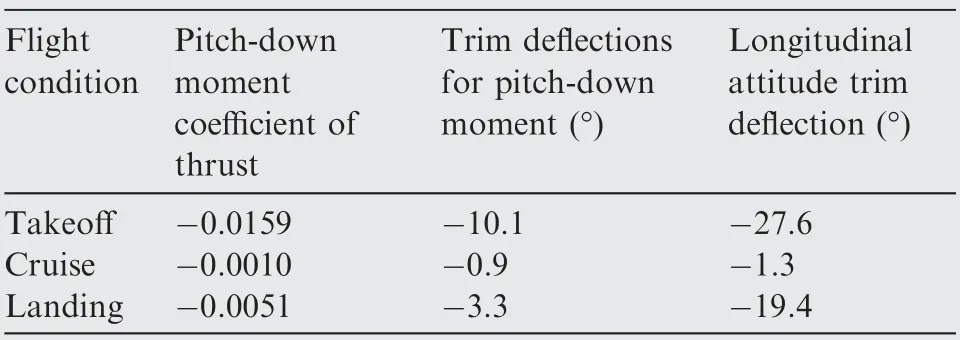
Table 10 Comparison of pitch-down moment coefficients of thrust and trim deflections
Using the DVF method, a closed-loop simulation model including the aircraft bare airframe and landing control law,a McRuer pilot model and digital control commands for the landing and flaring maneuver are built.Through mathematical simulation, the differences in longitudinal motion responses and control of the two aircraft are compared and analyzed.In the initial simulation state, the two aircraft approached steadily along a given glideslope from a height of 65 m,the initial flight path angle was-3°,and the throttle was maintained at the trim position. The aircraft started to flare when the CG was 15 m above the ground, and the throttle was slowly retracted to zero while the aircraft touched down.The simulation results are shown in Fig. 2.
Fig.2 shows that after the B747 aircraft starts to flare at the height of 15 m,as the throttle control slowly decreases,the digital pilot gradually pulls the stick to increase elevator deflection to make the aircraft pitch up,and the flight path angle quickly approaches zero, which takes approximately 10 s to touch down.
When the BWB400 aircraft starts to flare, as shown in Fig. 2(e) and (f), as the throttle control decreases, the digital pilot first needs to push the stick to reduce elevator deflection to balance the pitch-up moment caused by the thrust variation and then pull the stick to increase elevator deflection. This leads to an incoordinate operation of the throttle and elevator and delays the touch down process;it takes approximately 30 s to complete the touch down process.
In summary, after adopting the podded engine arrangement,thrust variation will obviously interfere with the longitudinal dynamic response of the BWB400 aircraft, which makes it difficult for the aircraft to touch down during landing. It is necessary to introduce an appropriate control decoupling design to achieve de-coupling of the longitudinal dynamic response with thrust variation.
4.3. Maximum directional control power requirement
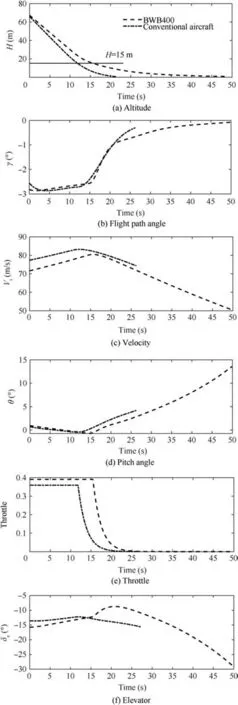
Fig.2 Comparison of longitudinal responses and control inputs during flaring between BWB400 and B747 aircraft.
For conventional aircraft with multiple engines, One Engine Inoperative (OEI) is the most important benchmark task for evaluating the control power of yaw control effectors.The critical state for OEI is the takeoff phase.In this state,the engines work with maximum thrust,and the yaw moment generated by asymmetric thrust is very large,which is suitable for evaluating whether the yaw control effectors have enough control power.Table 11 presents the control deflections of the BWB400 and B747 aircraft for the OEI trim at the takeoff phase, and the trim control deflections for the crosswind trim task are given as a comparison.
According to Table 11, under typical directional control power evaluation tasks, for the B747 aircraft, the yaw trim deflection of the OEI task is larger, whereas for the BWB400 aircraft, the yaw trim deflection of the crosswind trim task is larger.Due to the podded engine arrangement,the two engines of the BWB400 aircraft are mounted very close; when one engine fails, the yaw moment generated by asymmetric thrust is significantly reduced compared with that of conventional aircraft. The required control deflection for trimming the yaw moment of asymmetric thrust is small, which is significantly lower than that of the crosswind trim task. Besides,the roll moment caused by V tail and asymmetric thrust is also reduced;hence the roll trim control deflection after OEI is also very small. In current airworthiness regulations, the evaluation tasks for directional and lateral handling characteristics(CCAR25.147(a), (c), (d)) are all based on OEI condition.But for BWB aircraft with podded engines, the directional and lateral control deflections after OEI are small, and using those evaluation tasks cannot accurately evaluate the control power requirements of lateral-directional control effectors.Therefore, it is recommended to use the crosswind trim task instead of OEI to assess the control effectiveness of lateraldirectional control effectors.
5. Variation of characteristic speed relationships
5.1. Takeoff characteristic speeds
As an important performance index for civil aircraft,the characteristic speeds are primarily affected by aircraft design parameters such as aerodynamic configuration, thrust-toweight ratio and wing load. The characteristic speeds during the takeoff phase are important references to determine the takeoff performance of an aircraft. The numerical relationships between the characteristic speeds given in current airworthiness regulation are determined based on conventional aircraft, but there are several great differences between BWB aircraft and conventional aircraft, including the configuration and engine arrangement; hence, the relationships of the characteristic speeds for BWB aircraft may not satisfy the requirements of airworthiness regulation.In this paper,by comparing the takeoff characteristic speed values with those of conventional aircraft, the characteristic speed variation relationships of the BWB400 aircraft are determined.
The key characteristic speeds during the takeoff phase include the decision speed(V),the rotation speed(V),the liftoff speed (V), and the takeoff safety speed (V). Table 12 shows the relationships specified in airworthiness regulations that the abovementioned characteristic speeds should satisfy.
In Table 12,Vis the corrected airspeed with OEI,ΔV is 1 s speed increment after OEI, Vis the ground minimum control speed, Vis the air minimum control speed, Vis the minimum unstick speed, and Vis the stall speed.
5.2. Reference speeds
As shown in Table 12, the air minimum control speed V,minimum unstick speed Vand stall speed Vare references for determining other takeoff characteristic speeds. Once the above reference speeds are determined, the remaining takeoff characteristic speeds can be estimated.The calculated reference speeds of the BWB400 and B747 aircraftare presented in Table 13.
According to Table 13, V, Vand Vof the BWB400 aircraft are lower than those of the B747 aircraft. The lower Vof the BWB400 aircraft than that of conventional aircraft is due to the better lift characteristics of the BWB configuration. As illustrated in Section 4.3, for the BWB400 aircraft,the required yaw and roll trim control deflections after OEI are small.Hence,the determined Vaccording to the airworthiness regulations(CCAR25.149) is small, and it is even lower than the stall speed of the aircraft, which means that it is meaningless to calculate the air minimum control speed of the BWB aircraft according to the airworthiness regulations for conventional aircraft. Vis determined by two types of constraints: the maximum lift coefficient under the tail-down angle and the pitch control efficiency. The minimum unstick speed of the BWB400 aircraft determined by the maximum lift coefficient is relatively small,but the pitch-down moment generated by thrust during takeoff is large, which means that a large Vis required to maintain equilibrium of the longitudinal moment.
5.3. Relationships between characteristic speeds
According to the reference speeds in Table 13, the takeoff characteristic speeds of the BWB400 aircraft are estimated and compared with those of the B747 aircraft in Table 14.Since Vmust be referenced to determine other takeoff characteristic speeds in airworthiness regulations,the ratio of takeoff characteristic speeds relative to Vis also presented in Table 14.
As shown in Table 14, the ratios of Vto Vfor the BWB400 and B747 aircraft are basically the same.The takeoff characteristic speeds V, Vand Vof the B747 aircraft aredetermined according to the lower boundary of the inequality constraint relative to Vin Table 12, which is adequate to satisfy the requirements of takeoff safety. However, for the BWB400 aircraft, V=1.27V, which is much larger than the inequality constraint V≥1.05Vdefined in airworthiness regulations. This subsequently causes the proportional relationships of Vand Vrelative to Vto increase significantly. The above differences are mainly due to the podded engines of the BWB400 aircraft. Since the two engines are mounted very close, Vof the BWB400 aircraft is significantly decreased compared with that of conventional aircraft.Vof the BWB400 aircraft is relatively large due to the influence of the pitch-down moment of the thrust on pitch control power. These variations change the relationships between the takeoff characteristic speeds and the reference speeds defined in airworthiness regulations. Therefore, it is unreasonable to directly estimate the takeoff characteristic speeds of the BWB400 aircraft based on airworthiness regulations that are applicable to conventional aircraft, which may not satisfy the requirements of takeoff safety. Since the determined Vof BWB aircraft according to airworthiness regulations is lower than Vof the aircraft, it no longer has the reference value as reference speed. Considering that the minimum unstick speed Vis the speed constraint that must be satisfied when aircraft takes off, it is recommended that the BWB aircraft should redetermine the proportional relationships between the takeoff characteristic speeds based on the minimum unstick speed.

Table 11 Comparison of control deflections for typical directional assessment tasks
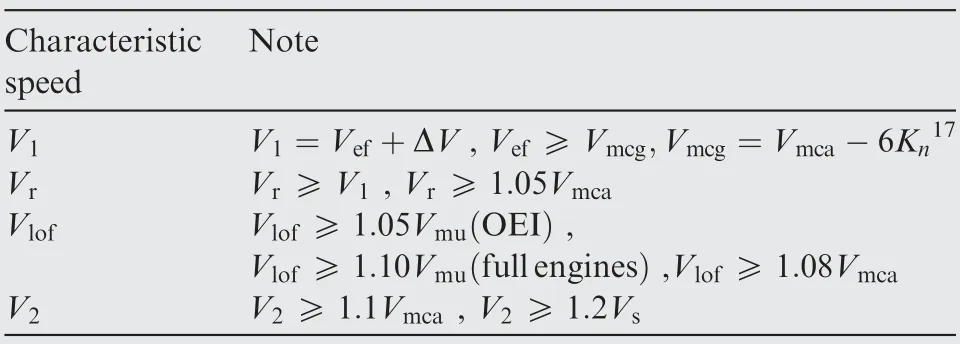
Table 12 Takeoff characteristic speeds
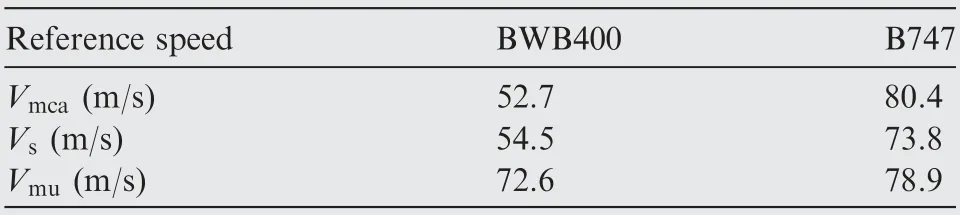
Table 13 Reference speeds
6. Conclusions
(1) Due to the short longitudinal length and the lack of a horizontal tail, the longitudinal static stability margin of the BWB400 aircraft is smaller than that of conventional aircraft, and its pitch damping is small, while the short-period mode of the BWB400 aircraft is still similar to that of conventional aircraft.The lateral static stability and roll mode characteristics of BWB aircraft are similar to those of conventional aircraft with large aspect ratio, but the directional static stability and yaw damping are both very small. The BWB aircraft has poor Dutch roll mode characteristics, the Dutch roll mode frequency is low, and the damping is severely insufficient; hence, the yaw axis has a strong tendency to oscillate when the directional motion is disturbed.
(2) According to the airworthiness regulations and the flying quality specification for transport aircraft, the requirements of relaxed static stability margin are determined. For conventional aircraft, the minimum static stability margin that can be relaxed is determined by the constraint of the short-period mode. Due to the influence of C, the phugoid mode of the BWB400 aircraft diverges quickly under cruise flight condition,which is the main constraint that limits its relaxation of the static stability margin, and the minimum statistic stability margin that can be relaxed for BWB400 aircraft is K=3.9%.
(3) The arrangement of podded engines has changed the handling characteristics of BWB aircraft. In the takeoff phase,the engines operate with full thrust,which generates a large pitch-down moment and requires a large longitudinal control deflection to trim the moment. In the landing phase,the BWB aircraft exhibits an obvious trend of pitching up when the thrust is reduced, which affects the landing and flaring process and makes it difficult to touch down compared with conventional aircraft. Due to the small distance of the podded engines,with key engine inoperative, the required lateral and directional control powers are very low, and thus it is recommended to evaluate the control effectiveness of the lateral-directional control effectors using the crosswind trim task.
(4) Due to the small distance between the podded engines,the determined air minimum control speed of the BWB400 aircraft according to airworthiness regulationsis lower than the stall speed of the aircraft, and thus it does not have practical reference significance. The minimum unstick speed of BWB400 aircraft is large due to the influence of thrust induced pitch-down moment on the longitudinal control effectiveness. These variations have changed the proportional relationships of takeoff characteristic speeds determined in the airworthiness regulations, and it is recommended to redetermine the relationships of the takeoff characteristic speeds for BWB aircraft according to minimum unstick speed.

Table 14 Relationship between takeoff characteristic speeds and reference speeds
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This work was supported by the Fundamental Research Funds for the Central Universities of China(No.YWF-21-BJ-J-935).