
基于多新息CDKF算法的锂电池SOC估计
2022-04-26 09:15达杨阳万佑红张帅帅
电源技术 2022年4期
达杨阳,万佑红,张帅帅
(南京邮电大学自动化学院、人工智能学院,江苏南京 210023)
锂离子电池因其比能高、负载能力高、自放电率低等优点[1],在电动汽车和储能系统中得到了广泛应用。SOC作为电池内部状态量,无法直接量测,只能通过电池外部电压和电流进行估计[2]。对SOC的不准确估计很容易导致电池过充或过放,从而危害电池本身并产生安全问题[3]。
SOC估计中常用的方法有:(1)安时积分法[4]和开路电压法[5],理论简单且易于实现,但受限于精度和测量条件;(2)人工神经网络[6],模糊逻辑建模[7],模糊神经网络[8]等机器学习方法,需要大量精确数据,且结果易受不同数据集影响;(3)Kalman 滤波法,其衍生算法在SOC估计中应用最为广泛。
锂离子电池实质上是非线性系统,由于模型误差和量测仪器偏差等因素,系统中常包含不确定性噪声。标准Kalman滤波极度依赖于模型的准确性,鲁棒性较差。扩展Kalman 滤波(EKF)[9]对非线性函数作一阶泰勒展开处理,忽略了二阶及以上误差,在系统非线性强度较大时误差比较明显。无迹Kalman 滤波(UKF)[10]采用sigma 点近似而非泰勒级数展开,避免了对非线性函数解析求导,但模型阶数增加会增加sigma点数量,增大计算复杂度。中心差分卡尔曼滤波方法(CDKF)[11]以中心差分代替泰勒公式中的一阶和二阶导数,避免复杂的求导运算,精度与UKF 相仿。H∞滤波[12]通过设计合适的代价函数J来确保系统状态在不确定性噪声影响下不会超出设定的性能边界,将噪声对状态估计的负面影响降到最低。但H∞滤波并非最优估计,算法估计结果偏保守。
本文采用等效电路模型对锂离子电池进行分析。为在模型精度和计算复杂度间取得平衡,建立二阶RC 等效电路模型,提出一种基于多新息的中心差分Kalman 滤波方法,将传统Kalman 滤波方法的标量新息拓展为新息向量,根据各历史信息与当前时刻数据关联程度赋予相应权值,有效提高SOC估计精度和鲁棒性。
1 锂离子电池建模与参数辨识
1.1 模型选取与建立
本文建立的二阶RC 等效电路模型如图1 所示。
图1 中,Uoc为开路电压;Ut为电池端电压;R1和C1分别是电化学极化电阻、电容;R2和C2分别是浓差极化电阻、电容;R0为内阻;I为电池电流,充电为正;U1为电阻R1端电压;U2为电阻R2端电压。
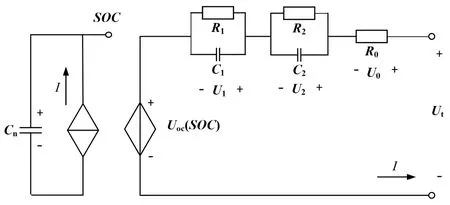
图1 二阶RC 等效电路模型
根据基尔霍夫定律和安时积分法表达式,对等效电路模型建立状态空间方程为:
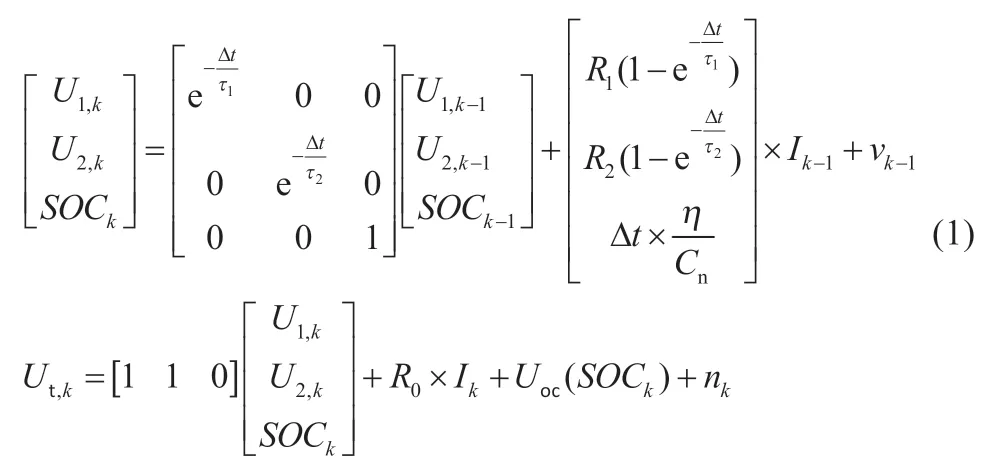
式中:Cn为电池的容量;η 为库仑效率系数;Δt为采样周期;vk-1和nk分别为k-1 时刻过程噪声和k时刻量测噪声;τ1和τ2为RC 网络的时间常数,τ1=R1′C1,τ2=R2′C2;Uoc()为Uoc关于SOC的函数;Ik-1为k-1 时刻的电流,Ik同理。
1.2 SOC-OCV 曲线
本文基于BT-2018D 国产锂电池测试系统、电池数据采集系统对LG18650HG2 三元锂电池进行实验。单体电池额定容量3 Ah,额定电压3.6 V,电压检测误差±1.5 mV,温度检测精度±1.5 ℃,数据采样频率为10 Hz,实验在25 ℃环境中进行。
对电池进行0.5C恒流充放电,充电或放电后将电池静置一定时间以获得准确开路电压Uoc。图2 为对充电和放电SOC-OCV曲线均值进行拟合[13],拟合式如下:

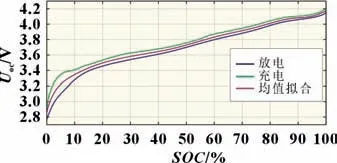
图2 SOC-OCV曲线
1.3 带遗忘因子递推最小二乘法
由于锂离子电池模型中参数会受到环境温度和电池老化程度的影响,参数会随SOC变化而变化,因此采用最小二乘法进行参数辨识。带遗忘因子递推最小二乘法(FFRLS)[14]在递推最小二乘法(RLS)的基础上引入遗忘因子λ,降低旧数据对参数估计的影响,避免数据饱和现象。λ 一般取值0.90~1.00 之间,本文取值为0.96。FFRLS 表达式为:
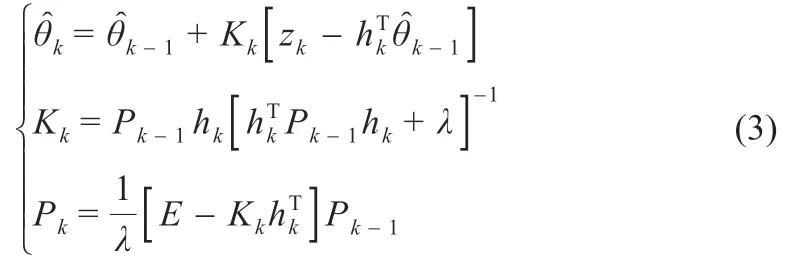
式中:θk为待辨识参数向量为估计参数向量;Kk为增益向量;zk为系统实际输出值;hk为数据向量;T 为矩阵或向量的转置;Pk为估计误差协方差矩阵;E为单位矩阵。
1.4 模型参数辨识
锂电池通常可视为非线性时变系统,式(1)对应的脉冲传递函数为:

式中:a1,a2,b1,b2,b3为AR 模型待辨识参数。
令Uk=Ut,k-Uoc,k,由脉冲响应不变法将式(4)转换为差分方程:

式中:a1,a2,b1,b2,b3为AR 模型待辨识参数,这些参数与二阶RC 模型中的电阻和电容可相互转换。令Zk=Ut,k-Uoc,k,=[Zk-1,Zk-2,Ik,Ik-1,Ik-2],待辨识参数向量a1,a2,b1,b2,b3]。设为合理初值,P0为103×E5×5,E5×5为5 阶单位矩阵。对DST 工况数据应用FFRLS 进行参数辨识,得到各电阻电容实时值。将模型输出值与实际值进行对比,仿真结果与实测结果对比及误差见图3。
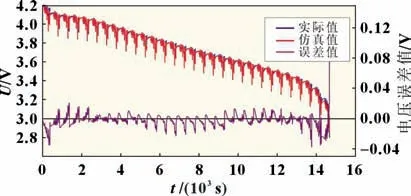
图3 模型输出与实际电压对比及误差
从平均相对误差(MRE)、绝对误差均值(MAE)和均方根误差(RMSE)三方面进行评测,各指标定义如下:
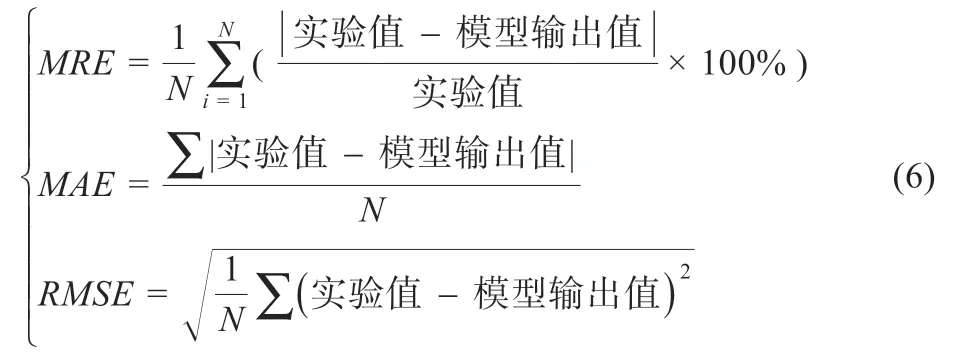
式中:N为采样点总数。由参数辨识结果得MRE为0.148 68%,MAE为5.4 mV,RMSE为7.7 mV,辨识精度较高。
2 基于MI-CDKF 的SOC 估计算法
相比于EKF 需要进行求导运算,CDKF 方法采用Sterling差值公式,采用中心差分替代EKF 的一阶和二阶导数。中心差分通过对非线性函数特定点的值进行计算,避免了复杂的求导运算,CDKF 的迭代流程见图4。
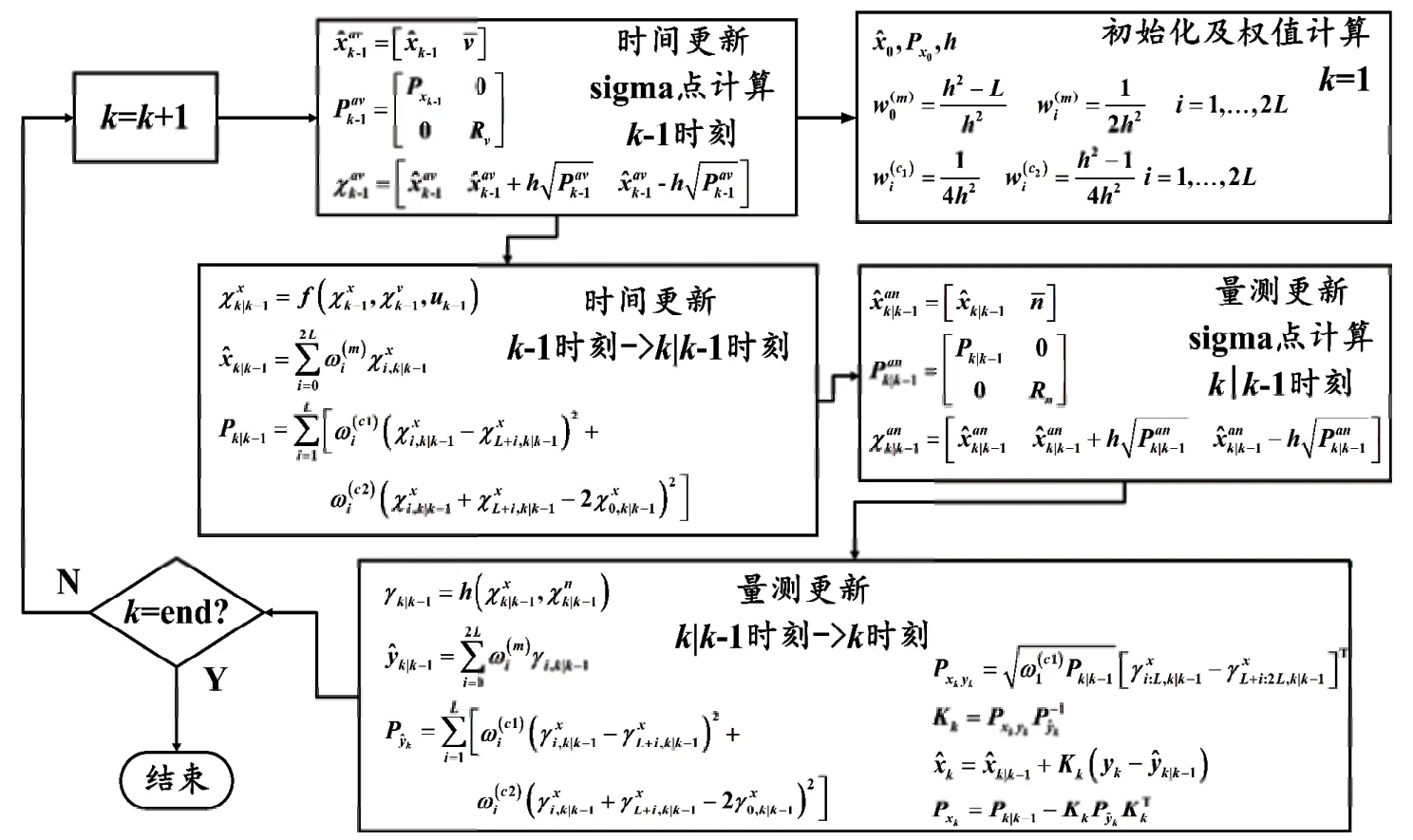
图4 CDKF迭代流程图
图中:xav=[xTvT]T,xan=[xTnT]T,h≥1 为中心差分步长,L为增广状态向量维数,Rv为过程噪声协方差矩阵,Rn为量测噪声协方差矩阵,(·)2为向量外积简写,如a2=aaT。
为对过去时刻历史信息加以利用,引入多新息理论,与中心差分Kalman 滤波结合。将标量新息扩展为新息向量,同时将CDKF 的增益向量扩展为增益矩阵Kp,k:
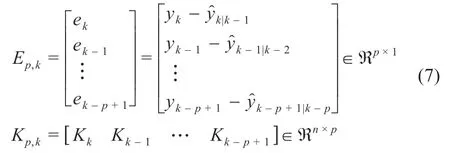
式中:p为新息向量长度;Kp,k表示长度为p的Kalman 增益矩阵;Kk-p+1为相对于当前时刻过去p-1 时刻的增益向量。
由量测更新中单独提出后验估计式:

将标量新息和增益向量换为扩展后的新息向量和增益矩阵,表示如下:

式中:λj的取值会影响到MI-CDKF的性能改善程度。文献[15]提到新量测数据应当比旧量测数据赋予更大权重。为保证当前数据的更新误差作用占主导地位,对λ 值的取值应当遵循以下原则:

式中:0<h<1,h趋于1 时,旧数据权重等同当前数据,h趋于0时退化为CDKF。当多新息向量长度≤3 时,为突出当前数据作用,h值根据经验可取0.80 以内的值。多新息长度大于3时,偏重对历史信息的考虑,h值根据经验可取0.50 以上的值。
出于计算量考虑,多新息向量长度一般限制在2~8 以内,因此对λ 值的选取如下:
式中:α,β 值选取视多新息向量长度而定。
3 实验结果与分析
实验采用UDDS 工况对电池进行放电,并在此工况数据下验证本文算法。为比较MI-CDKF 和EKF、UKF、CDKF 的鲁棒性和收敛速度差异,将SOC初值设置为0.7。其中收敛速度用调节时间表示定义为:ts=max{t|(SOCes-SOCref)≥±5%},式中SOCes为SOC估计值,SOCref为参考SOC值。为了在提升估计性能的同时不过多增加计算量,扩展新息向量长度取2、3、4 进行比较。
基于式(11)的参数选取准则,为兼顾收敛速度和估计精度,通过多次实验获取较为合理的参数区间,见表1。
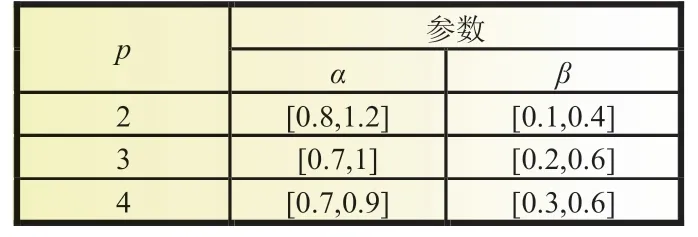
表1 不同长度新息向量合理参数区间
表1 中参数在给定区间内收敛速度和估计精度都有所提升,但参数的选择对收敛速度和估计精度的影响有偏重性。为兼顾两者,当p=2 时,选取α=0.9,β=0.3;p=3 时,选取α=0.8,β=0.4;p=4 时,选取α=0.7,β=0.4。对三种不同新息长度的MI-CDKF 进行仿真。实验结果如图5 和图6 所示。为便于观察估计精度和收敛速度,图5 和图6 加入了局部放大图。
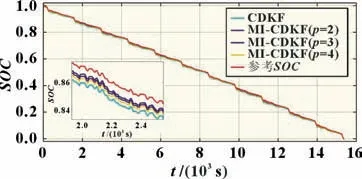
图5 不同p值下SOC估计结果
图5 中,CDKF 算法引入多新息理论后,估计精度得到了改善,其中p=3 时改善精度最佳。由图6 可见MI-CDKF 的收敛速度快于标准CDKF,同时估计精度均得到不同程度改善。表2 显示了不同p值下CDKF 的性能对比。对比各性能可见多新息向量长度为3 时效果最佳。
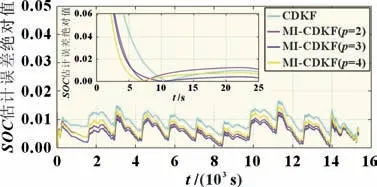
图6 不同p值下SOC估计误差
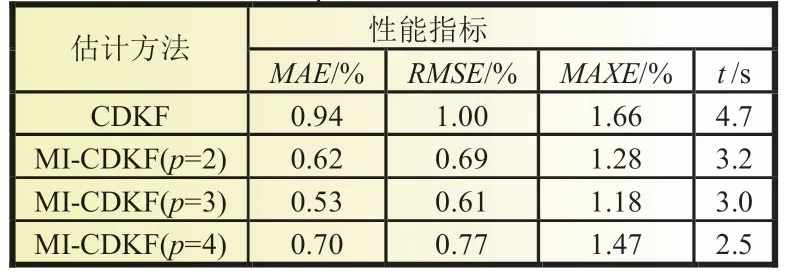
表2 不同p 值下CDKF 性能对比
为验证MI-CDKF 对不同SOC初值的鲁棒性,将SOC初值分别设置为0.3、0.5、0.7,得到的仿真结果如图7 所示。其中SOC=0.3 时调节时间为11.7 s,SOC=0.5 时调节时间为7.1 s,SOC=0.7 时调节时间为3 s,MI-CDKF 方法对不同SOC初值均具有较强鲁棒性。
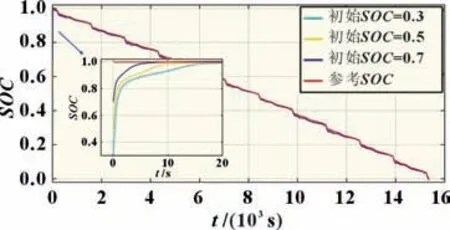
图7 不同SOC初值对比
将MI-CDKF(p=3)与EKF、UKF 和CDKF 进行比较,对上述方法均设置过程噪声协方差矩阵Q为diag([0.01 0.02 0.000 01]),其中diag表示对角阵,量测噪声协方差矩阵R为0.01。结果如图8 和图9 所示。
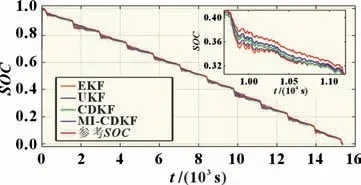
图8 不同SOC估计方法结果

图9 不同SOC估计方法误差对比
图8 和图9 中可以看到,MI-CDKF 在收敛速度和估计精度上都明显优于其他三种方法,四种方法的性能对比见表3。
表3 显示,MI-CDKF 方法比起常用的EKF、UKF 和CDKF方法在绝对均值(MAE)、均方根误差(RMSE)、最大误差的绝对值(MAXE)和收敛速度上均更有优势。

表3 不同SOC 估计方法性能对比
在实际电池管理系统中,传感器的误差主要有系统误差和随机误差,随机误差可通过Kalman 滤波算法予以较好抑制,而系统误差可以看作是加在测量值上的偏移值[16]。考虑到电池管理系统中常用电压传感器最大漂移范围不超过0.01 V,电流传感器最大漂移范围不超过0.1 A,为验证所提方法鲁棒性,分别在电压和电流上人工加入固定电压误差和电流误差,最后将两种误差合并加入。图10 显示四种不同状况下MI-CDKF(p=3)方法SOC估计性能的对比,其中M1 表示MI-CDKF 无电压电流漂移情况,M2 表示MI-CDKF 带电压漂移情况,M3 表示MI-CDKF 带电流漂移情况,M4 表示MICDKF 带电压电流漂移情况。
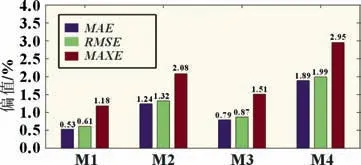
图10 四种情况下MI-CDKF性能对比
由于实际运行中电压信号和电流信号的最大漂移范围小于设定值,因此此法在实际应用中性能应优于实验中设定情况下测试所得性能。MI-CDKF 在传感器带漂移情况下依旧保持一定鲁棒性。
4 结论
根据锂离子电池的特性,建立了二阶RC 等效电路和对应的非线性状态空间方程,采用带遗忘因子的递推最小二乘法(FFRLS)对电池相应参数进行辨识,并将多新息理论引入中心差分卡尔曼滤波(CDKF)。首先对比不同新息向量长度下的多新息中心差分卡尔曼滤波(MI-CDKF)和标准CDKF 的性能,当p=3 时,MI-CDKF 的改善效果最佳。其次在不同SOC初值下验证MI-CDKF 的鲁棒性,并将MI-CDKF 与传统的EKF、UKF 和CDKF 进行实验对比,结果表明MI-CDKF 在估计精度和收敛速度方面均优于传统方法。最后在传感器漂移现象中验证了MI-CDKF 的鲁棒性。
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
新高考·高一数学(2022年3期)2022-04-28
新世纪智能(数学备考)(2021年5期)2021-07-28
科技研究·理论版(2021年22期)2021-04-18
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
电脑知识与技术(2016年28期)2016-12-21
高中生学习·高三版(2016年9期)2016-05-14
