
混合交通流环境下单交叉口自动驾驶车辆轨迹优化
2022-04-26 06:49刘春禹刘永红罗霞朱颖
交通运输系统工程与信息 2022年2期
刘春禹,刘永红,罗霞*,朱颖
(1.西南交通大学,a.交通运输与物流学院,b.综合交通运输智能化国家地方联合工程实验室,成都 611756;2.中国铁路工程集团有限公司,北京 100039)
0 引言
城市道路交通对人们日常出行、经济发展等具有重要作用,但同时,也造成道路拥堵以及大量的能源消耗。据美国德克萨斯州交通局的数据显示[1],2014年全美国由于交通拥堵造成约31亿加仑燃料消耗,并且多数燃料消耗和能源浪费都是由于城市信号交叉口。信号交叉口作为城市交通网络的重要节点,虽然对减少交通冲突、保障车辆行驶具有积极作用,但另一方面,也降低了道路整体的通行能力,造成交通拥堵和能源浪费。因此,提高车辆在交叉口的通行效率对降低整体碳排放和节约能源具有重要意义。
近年来,自动驾驶汽车作为未来交通领域的重要发展方向,得到交通行业以及政府的重要关注。然而,自动驾驶完全实现仍然需要一定的过渡阶段,因此城市道路将会存在长期的混合交通环境,即自动驾驶车辆(Connected Vehicle,CV)和人工驾驶车辆(Human-driven Vehicle,HV)的混合交通流环境。
目前在自动驾驶环境下,已经有很多学者证明了自动驾驶技术可以大大提高交叉口车辆的通行效率。在纯自动驾驶环境研究中,Xu 等[2]指出,在自动驾驶的环境下,通过优化信号灯以及自动驾驶车辆的速度,可以大大降低车辆行程时间以及停车次数;Yu 等[3]提出自动驾驶环境下,单交叉口信号灯和车辆轨迹优化方法,并通过仿真验证了该方法可以提高交叉口的通过能力;He等[4]优化了自动驾驶车辆在多个信号交叉口的速度,并且考虑了排队情况,并利用仿真验证了方法的有效性;Jiang[5-6]等基于极小值原理迭代算法对纯自动驾驶车辆进行控制优化。针对混合交通流环境的研究,Yao 等[7]将轨迹视为一个分段函数,提出混合交通环境下单交叉口的分布式车辆轨迹优化模型;Li 等[8]对单交叉口自动驾驶车队进行信号优化控制;Yang等[9]基于主干路拥堵情况,对混合动力汽车进行生态驾驶控制。
总结当前研究发现,针对自动驾驶车辆轨迹优化,大多是基于渗透率为100%的纯自动驾驶环境,然而在混合交通环境下,由于人工驾驶车辆的存在,无法准确获取所有车辆的状态信息,因此需要对车辆的速度、最短行程时间等信息进行估计。并且针对混合交通环境下的车辆轨迹优化,很少有对车辆行程时间估计进行细致的阐述。此外,针对验证场景方面,现有研究很少有较为全面的分析。本文为解决上述研究中的不足,有如下创新点:①将车辆划分为头车和跟驰车辆两种类型,考虑可能存在排队的影响,分别对不同类型车辆的行程时间进行估计,进一步得到混合交通环境下自动驾驶车辆的路段行程时间,通过滚动优化对车辆进行控制。②从燃油消耗、碳排放、行程时间、平均速度、自动驾驶车辆渗透率等多个方面对本文模型结果进行较为全面地对比分析和阐述。
1 问题描述与建模
1.1 场景描述
本文研究对象为图1所示的常规平面交叉口,4 个进口道方向分别划分了直行和左转两个车道,通信范围的边界设有车辆检测器,用来获取人工驾驶车辆进入通信区域时刻的速度、加速度、进入时间等信息。在通信范围内,自动驾驶车辆可以通过车载通信模块与中央控制器进行数据传输,中央控制器可以实时获取自动驾驶车辆的速度、加速度、位置,并对自动驾驶车辆进行控制。
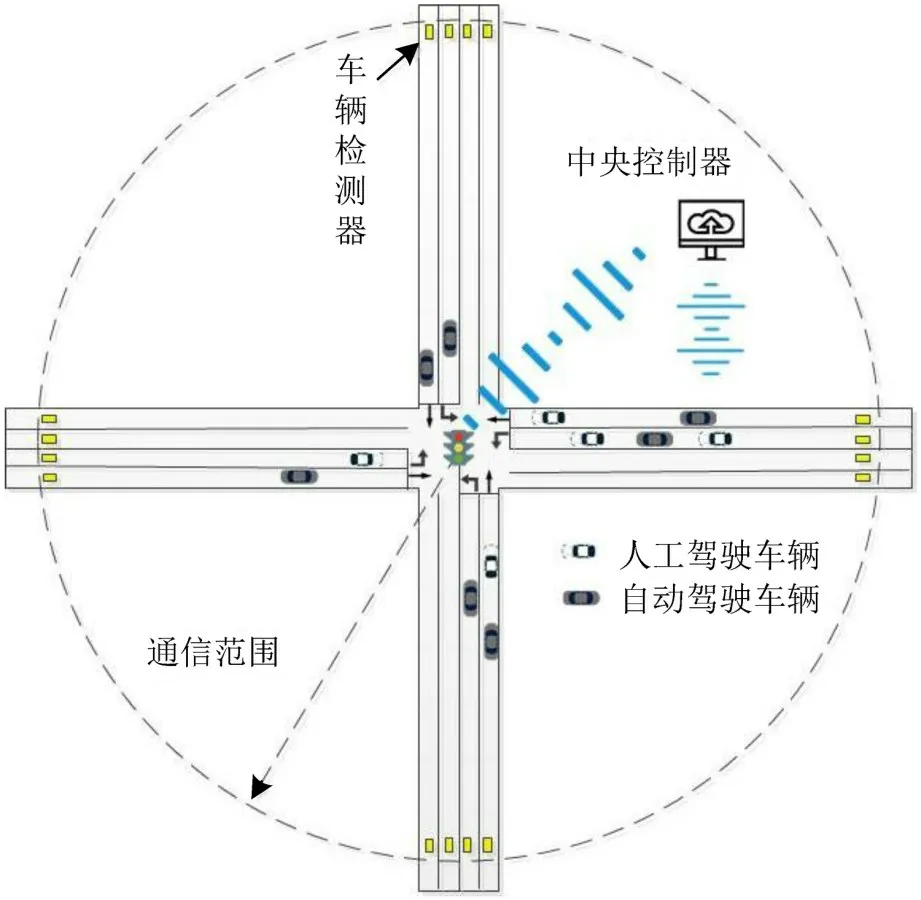
图1 研究场景Fig.1 Studied scenario
为简化数学模型构建以及方便研究,本文有如下假设条件和说明:
(1)车辆通信范围为400 m,在该范围的道路断面上,车辆禁止换道和超车行为;
(2)车辆仅能在有效绿灯期间内通过交叉口,清空相位时长为2 s;
(3)不考虑交通流过饱和情况,即车辆不存在二次及二次以上的排队现象;
(4)自动驾驶车辆和中央控制器之间的通信延迟较低,对自动驾驶车辆实时控制不产生影响;
(5)自动驾驶车辆可以通过车-车通信模块获取各自动驾驶车辆的位置、速度、加速度等信息,可以通过车-路通信模块与中央控制器进行信号灯配时方案的交互;
(6)直行车辆最大速度设置为14.66 m·s-1,左转车辆转弯时的最大速度设置为直行的70%;
(7)通信范围边界各车道均设有检测器,可获取人工驾驶车辆进入通信范围时的速度、加速度等信息,并将其传输到中央控制器;
(8)考虑到表述的简洁性,采用CV表示自动驾驶车辆,HV表示人工驾驶车辆。
1.2 信号配时
本文假定交叉口信号灯配时方案采用美国电气制造商协会(National Electrical Manufacturers Association,NEMA)[10]双环结构,8个进口道不同方向的绿灯时长分别为tNl,tST,tWl,tET,tSl,tNT,tEl,tWl,所有车辆只允许在绿灯时间进入交叉口,其中下标N,S,W,E 分别代表车辆进口道的4 个方向,即北,南,西,东,l,T 分别代表左转和直行。因此,可以得到8 个相位的绿灯时间窗gNl,gST,gWl,gET,gSl,gNT,gEl,gWl为
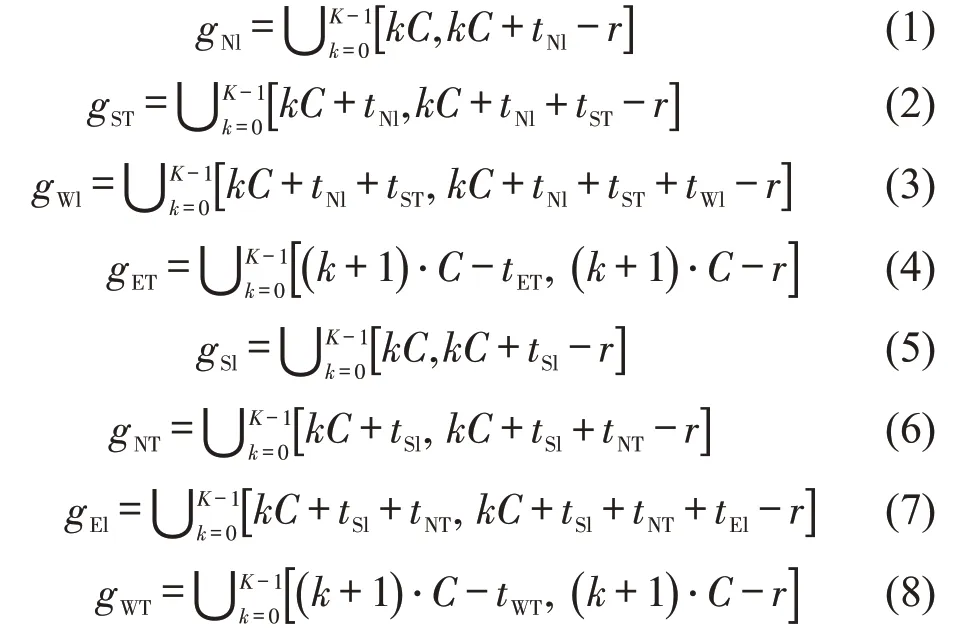
式中:C为单个信号周期总时长;k为当前是第几个周期;K为总的周期数;r为清空相位时长。
1.3 人工驾驶车辆跟驰模型
目前HV 车辆跟驰模型采用较多的是智能驾驶员(IDM)模型、最优速度(OVM)模型等,但是IDM 模型存在车辆跟驰速度相对较小的特性,而OVM 模型结构简单且易于分析,故本文采用Helbing等提出的OVM模型对HV车辆的驾驶行为进行描述。模型为
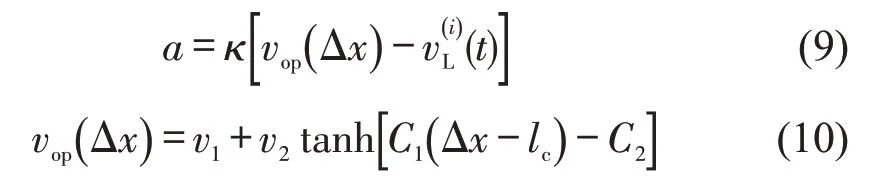
式中:a为车辆的加速度;为t时刻当前车道L第i辆车的速度;Δx为相邻两辆车之间的车头间距;vop(Δx)为车辆期望速度;κ为敏感系数;v1,v2,C1,C2为模型参数;lc为车辆长度。此外,考虑到OVM 模型可能存在加速度过大问题,本文对车辆的速度、加速度以及车辆最小安全距离进行约束,以保证车辆行驶安全,公式为
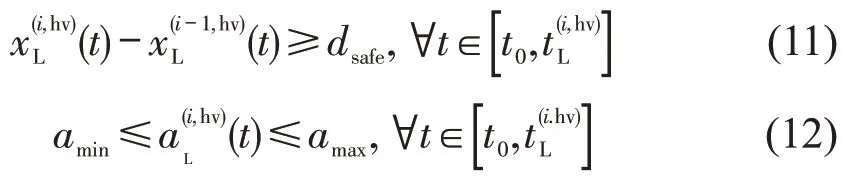
式中:dsafe为车辆间最小安全距离;t0为车辆进入控制区域的时刻;为车辆进入交叉口的时刻;和分别为任意两辆相邻人工驾驶车辆的位置;为人工驾驶车辆t时刻的加速度;amin和amax为加速度的最小值和最大值。值得注意的是,本文假设自动驾驶车辆与人工驾驶车辆的性能一致,即加速度和速度约束范围是相同的。
1.4 车辆行程时间估计模型
根据车辆所处位置信息将车辆分为头车和跟随车辆。头车意味着该车辆正前方没有任何车辆,故车辆可以不受车辆跟驰模型的约束;跟随车辆是指该车辆前方有行驶车辆,故车辆行驶状态受前车影响。
假定道路限速为vt,为方便表示,本文将道路限速视为期望车速。人工驾驶车辆在不考虑跟驰特性的情况下,倾向于优先加速到期望车速。则车辆行程估计可分为头车行程时间估计和跟驰车辆行程时间估计两种情况。
(1)头车行程时间估计
头车最短行程时间为
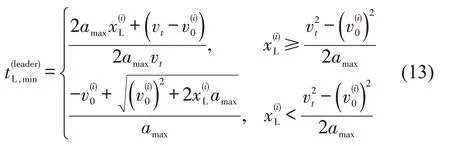
式中:为L 车道上头车的最短行程时间;为头车距离交叉口的距离;为当前车辆的速度
车辆通过交叉口的行程时间为

式中:tcurrent为当前时刻;为l 车道下一周周期的绿灯起亮时刻,G为绿灯时间窗的集合,即G={gNl∪gST∪gWl∪gET∪gSl∪gNT∪gEl∪gWl}。
(2)跟驰车辆行程时间估计
跟驰车辆由于要考虑前车约束,需要加入车头时距h的约束,则跟驰车辆的最短行程时间为

跟驰车辆通过交叉口的时间为
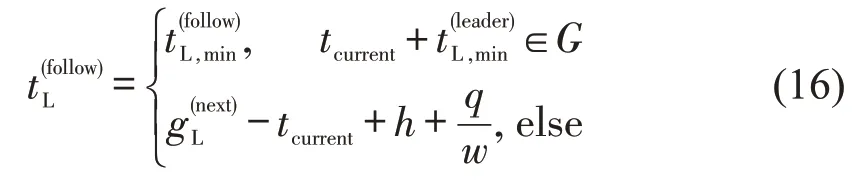
式中:q为L 车道的排队长度,如果不存在排队则为0;w为排队消散速度。
1.5 自动驾驶车辆轨迹优化模型
本文提出的优化模型以降低车辆燃油消耗和碳排放,增大车队通过速度为目标,模型分为以下3个部分。
(1)车辆动力学模型
设CV(L,i)为L 车道上的第i辆自动驾驶车辆,则该车辆的状态矩阵为
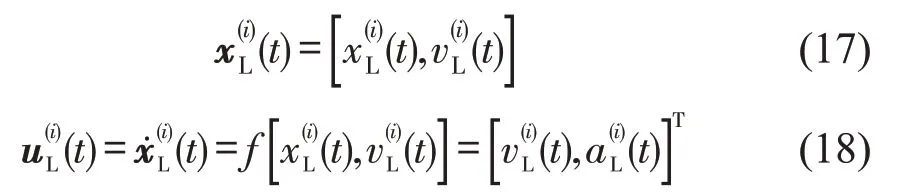
式中:为车辆行驶距离;为速度;为加速度,同时也是控制变量。
(2)燃油消耗模型
目前燃油消耗模型较多,考虑模型的准确度和复杂性,本文采用Virginia Tech microscopic(VTMicro)[12]模型进行燃油消耗计算,即

式中:Kj1j2为常数项矩阵;j1和j2分别为指数函数的系数。
(3)最优控制模型
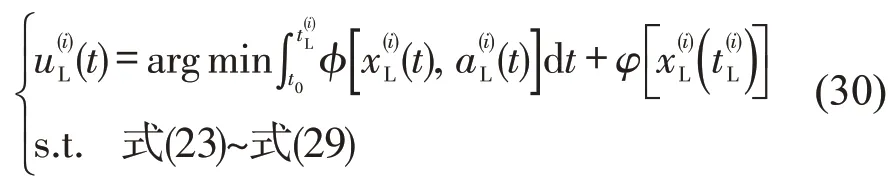
本文损失函数为
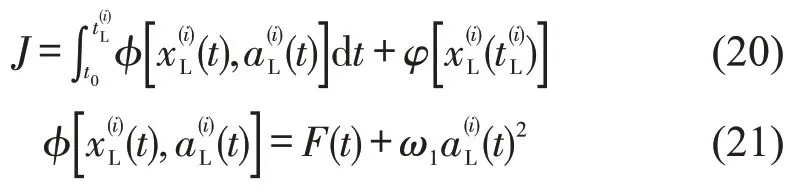

式中:为进入交叉口的时刻;为终端时刻的损失函数;为控制期间的损失函数;ω1,ω2,ω3分别为不同指标的权重系数。
此外,上述模型应满足如下约束条件。
(1)安全距离约束
虽然在行程时间估计模型中已经加入车头时距h,但为保障车辆的安全性,还需要加入车辆安全距离约束,即相邻前后两辆车在任意t时刻都应该满足

式中:dsafe为最小车辆安全间距。
(2)车辆状态约束
对于CV(L,i),应当满足初始时刻和终端时刻的状态约束,即
式中:vmin为最小速度(m·s-1)。
式(24)和式(25)表示,在t0时刻,对于L 车道上的第i辆车,其位移为0,初始速度为;式(26)表示当在终端时刻时,其位移为l,l表示通信范围到交叉口进口道的距离。
(3)速度及加速度约束
车辆的加速度、减速度和速度约束为
式中:Jmin,Jmax分别为最小、最大急动度(m·s-3)。
式(27)和式(28)分别对车辆加速度、速度的变化等进行了限制,加速度和速度约束范围与人工驾驶车辆一致。此外,式(29)对车辆的加速度的导数急动度进行了约束,保证车辆行驶的平稳性。
综上,本文构建的自动驾驶车辆轨迹优化模型为
2 模型求解算法
本文提出的车辆轨迹优化模型包含非线性目标函数的最优控制模型,很难直接求解。目前常用的求解算法有直接求解法和间接求解法。考虑到目标函数的复杂性,采用离散化间接求解方法,通过将原模型离散化对模型进行求解。伪谱法针对大规模非线性模型具有求解收敛速度快、求解精度较高的特点,故本文采用伪谱法求解模型,具体求解过程可参考Xu等[11]。
伪谱法的求解步骤如下:
Step 2 配点计算。用牛顿法迭代寻找最终离散点。
Step 3 状态变量及控制变量离散化。采用拉格朗日插值法逼近离散点的状态变量和控制变量。
Step 4 状态空间方程转换。将状态空间方程的微分形式转化为带有配点处状态值和控制变量的代数形式。
Step 5 目标函数转换。利用高斯-洛巴托求积规则对目标函数进行变换,以提高积分变换的精度。
3 仿真场景搭建
为验证自动驾驶车辆轨迹优化模型的有效性,基于SUMO 仿真平台,采用Python 语言通过Traci接口进行场景搭建和建模分析。SUMO 是一款开源的交通仿真平台软件,可以实现本文模型的所有功能。
本文仿真分析以下3个场景:
场景1 人工驾驶环境下,交叉口为固定信号配时方案的车辆仿真。该场景作为基本场景,与其他方案进行对比分析。
场景2 渗透率为50%的混合交通环境下,交叉口为固定信号配时方案的车辆仿真。
场景3 纯自动驾驶环境下,交叉口为固定信号配时方案的车辆仿真。
3 个场景中,每个进口道车辆量均设置为400 辆·h-1,仿真时间步长为0.5 s,并且设定车辆服从均匀分布到达,仿真总时长为3600 s。需要注意的是,本文考虑到左转车辆与直行车辆在交叉口存在速度差异,设定当自动驾驶车辆进入距离左转车道停车线150 m范围时,期望速度将设定为道路限速的70%,以防止车辆被迫减速转弯,造成不必要的燃油浪费,这与现实车辆行驶保持一致。仿真结束后,车辆的轨迹数据、燃油消耗数据、检测器数据都会写入到xml文件中,通过进一步地数据处理对数据进行可视化分析和对比。
此外,本文还建立了不同渗透率下的混合交通场景(场景4~场景8),对渗透率进行敏感性分析,得出混合交通流中自动驾驶车辆比例对优化结果的影响。
场景4 信号配时方案不变,渗透率为20%的混合交通环境。
场景5 信号配时方案不变,渗透率为40%的混合交通环境。
场景6 信号配时方案不变,渗透率为60%的混合交通环境。
场景7 信号配时方案不变,渗透率为80%的混合交通环境。
场景8 信号配时方案不变,渗透率为100%的自动驾驶环境。
表1汇总了本文模型中用到的所有参数。
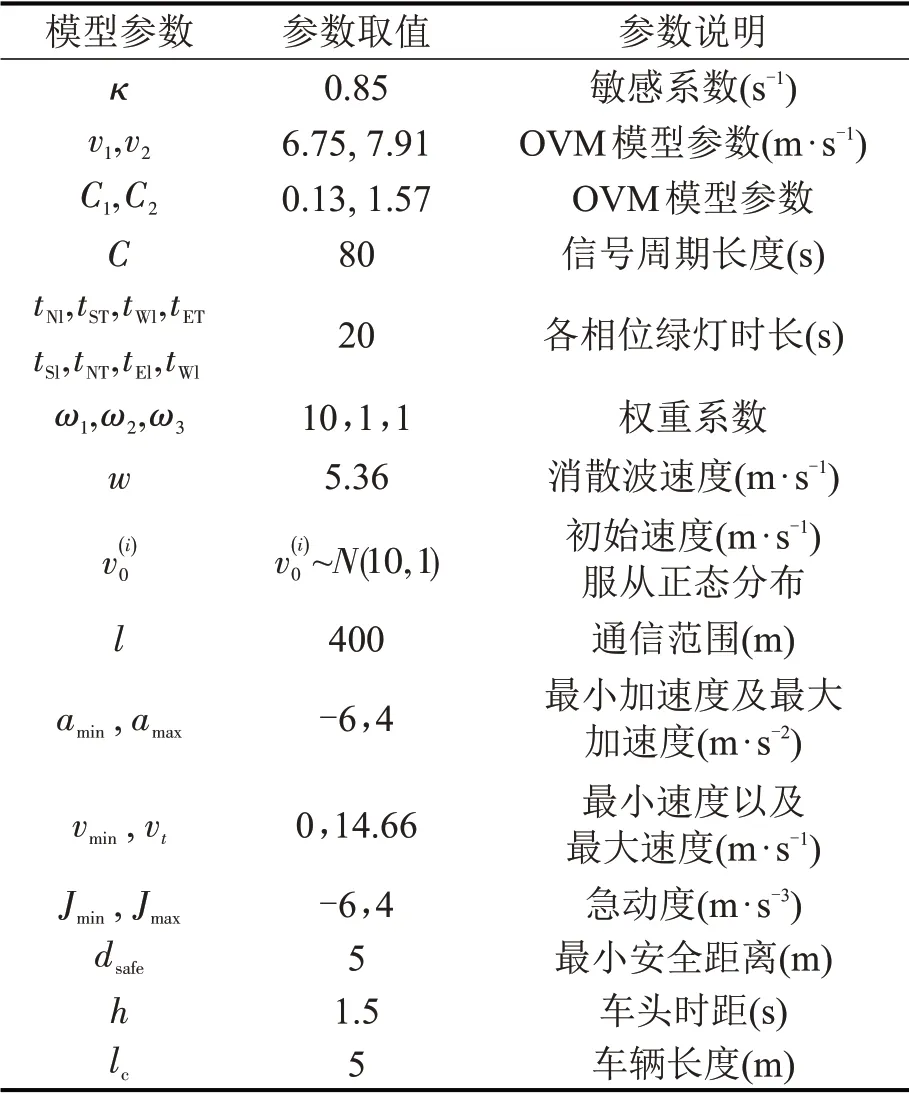
表1 模型参数Table 1 Parameter settings in model
4 仿真结果分析
首先对3个场景进行仿真分析,其中燃油消耗总量和平均燃油消耗量为车辆从进入通信范围开始到进入交叉口时的统计量,并不包含车辆进入交叉口后的消耗量。平均燃油消耗为燃油总消耗与车辆数的比值,代表单个车辆在路段上的平均燃油消耗量。仿真结果如图2所示。图2(a)为车辆燃油总消耗,可以看出,纯自动驾驶的场景3情况下,燃油消耗最少,在4 个进口道分别比场景1 节约了39.1%,39.6%,39.3%,42.9%;在混合交通流环境下,比场景1 节约了28.2%,24.2%,23.1%,23.1%的燃油消耗。图2(b)为车辆的平均燃油消耗量,相比较于场景1,场景2节约了22%左右的燃油消耗,场景3 节约了37%左右的消耗。此外,仿真利用SUMO 内置的欧洲道路排放因子(HBEFA)[13]模型,统计了各进口道所有车辆碳排放物及细颗粒物等数据,具体如表2所示。在混合交通流环境和自动驾驶环境下,碳排放和细颗粒物排放均明显地减少,在自动驾驶环境下甚至减少50%以上。
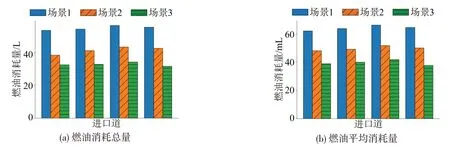
图2 进口道车辆燃油消耗量Fig.2 Fuel consumption of four edges
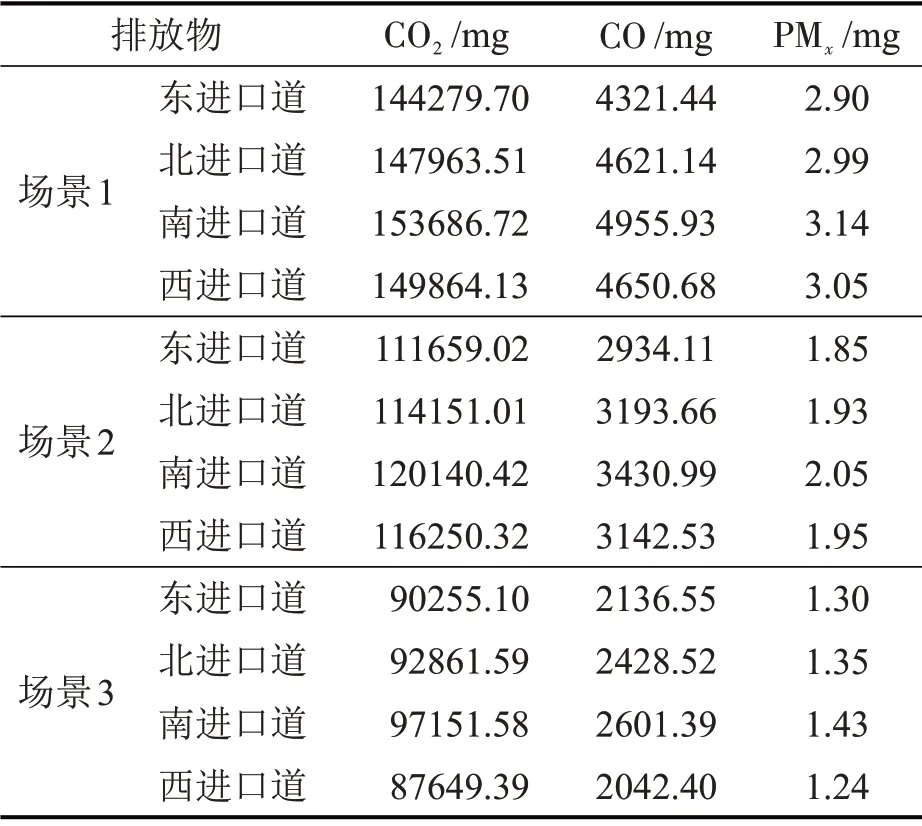
表2 车辆排放物Table 2 Vehicle emission
另外,本文进一步对比分析了车辆的平均行程时间、车辆平均速度、车辆损失时间等指标,具体优化情况如表3和图3所示。
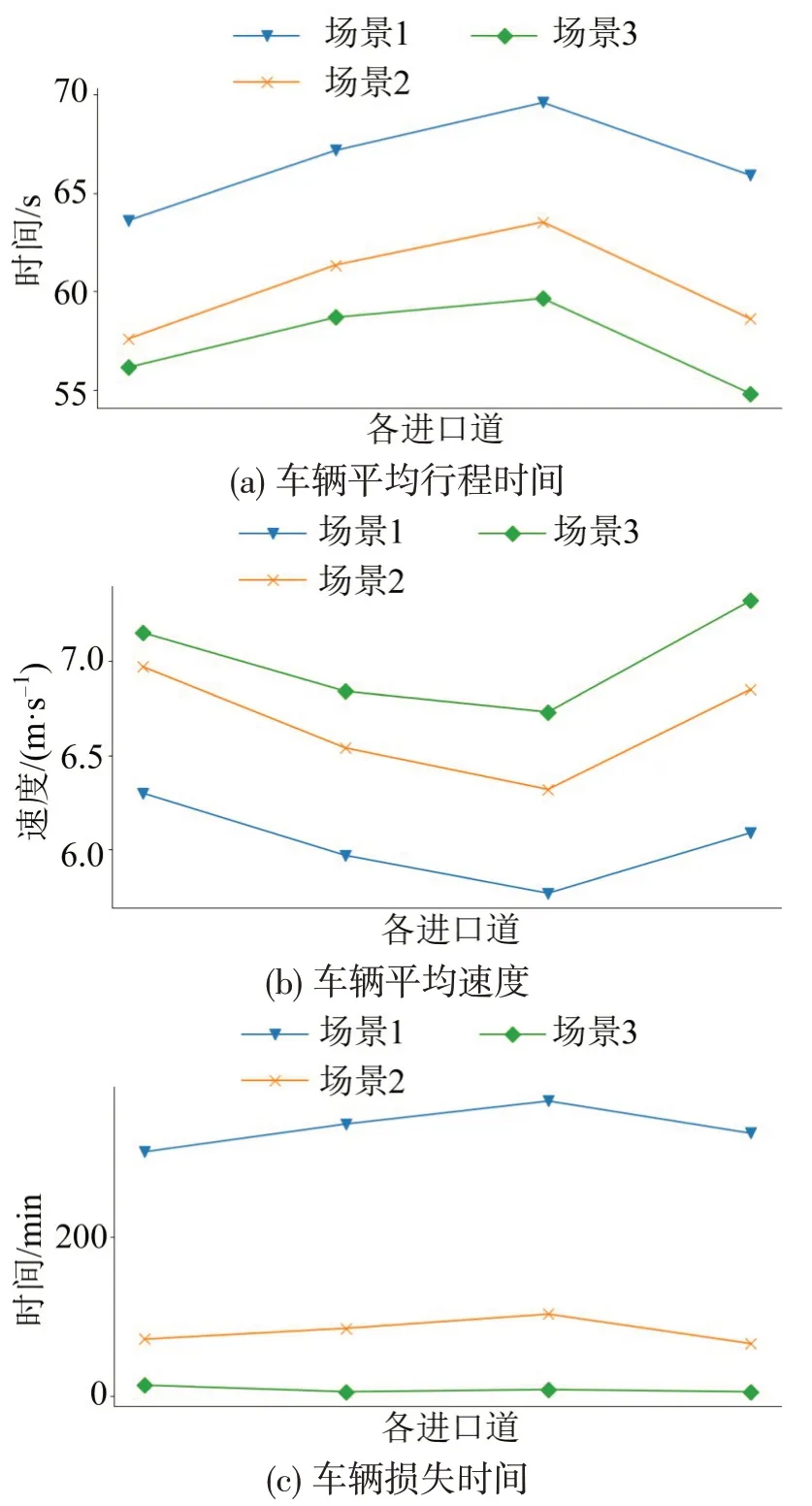
图3 场景1~场景3仿真结果Fig.3 Simulation results of case 1 to case 3
从表3中可以看出,针对上述衡量指标,CV对于降低车辆平均行程时间,提高通行效率以及减少车辆损失时间具有重要作用。需要注意的是,本文中车辆损失时间定义为车辆处于停车状态的时间总和,由于车辆在仿真中禁止换道和超车行为,因此CV 可以通过调整自身的加速度和速度来影响HV的状态,降低车辆停车次数,进一步提高交叉口的通行效率。
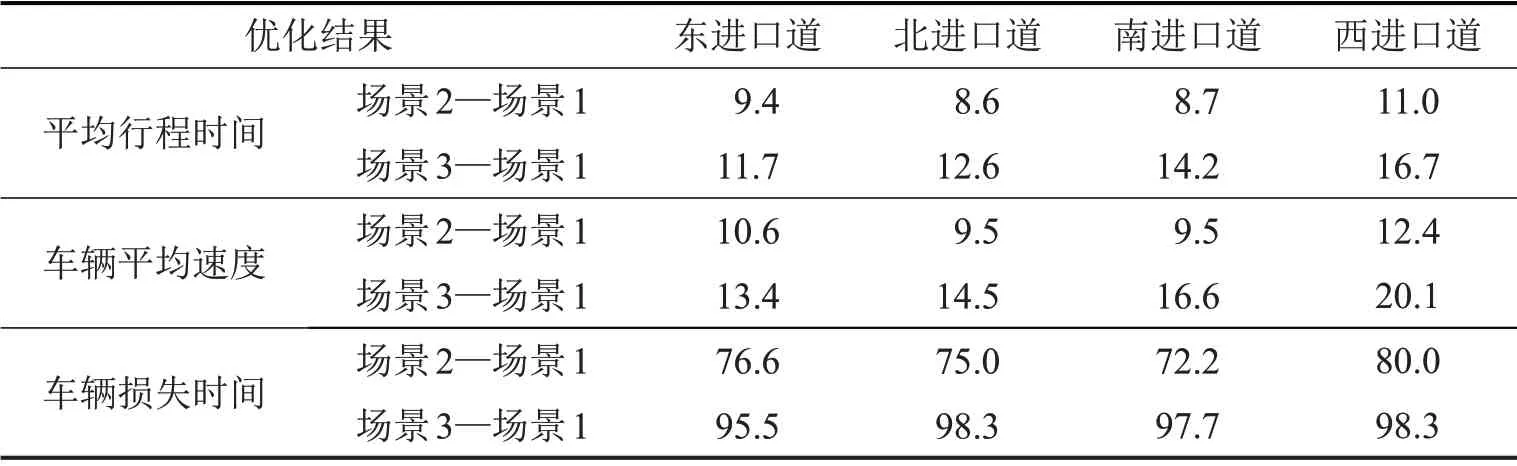
表3 优化结果Table 3 Result of optimization (%)
此外,本文选取西进口直行车道,假定自动驾驶车辆均匀分布在车道,在车道交通量为600 veh·h-1以及50%渗透率的混合交通环境下,对5 个信号周期的车辆轨迹进行展示,结果如图4所示。其中实线代表的是人工驾驶车辆轨迹,x 型线为自动驾驶车辆轨迹。
通过图4可知,由于优化模型的燃油消耗最小化以及终端时刻速度最大化的目标,自动驾驶车辆倾向于缓慢加速到期望速度,并保持期望速度通过交叉口。当前绿灯时间窗无法通过交叉口的情况下,车辆会选择以较低的速度继续向前行驶,直到车辆停止。值得注意的是,自动驾驶车辆没有停靠在停车线附近,这是为了在下个绿灯时间窗可以以较快的速度进入交叉口,这与Yao 等[7]在得出的结果一致。同时,自动驾驶车辆改变自身状态的时候,也会影响人工驾驶的跟驰车辆,使得整个车队的燃油消耗降低以及增大交叉口的通行效率,进一步证明了本文所提出的自动驾驶车辆轨迹优化模型的有效性。
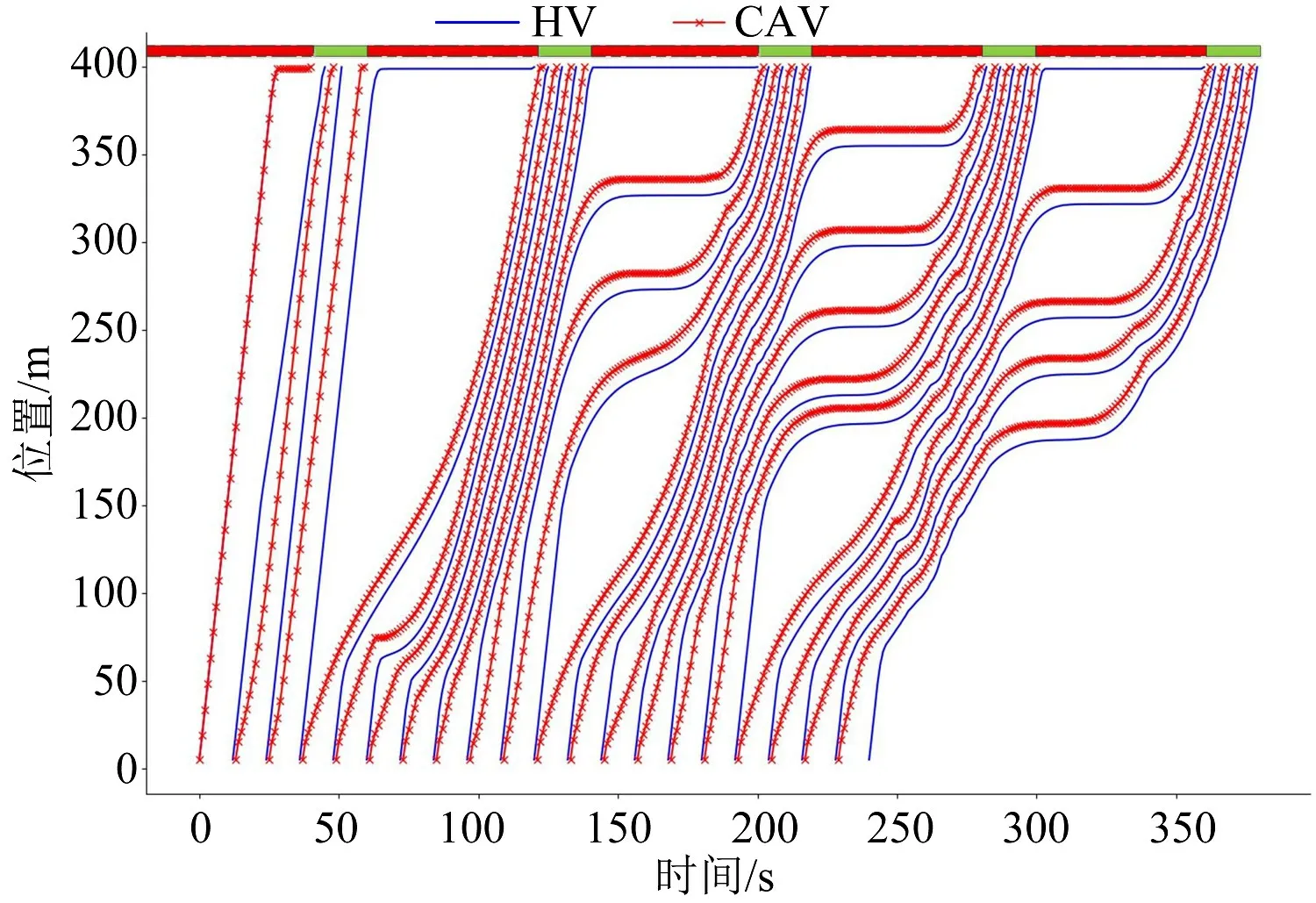
图4 车辆运行轨迹Fig.4 Trajectory of vehicles
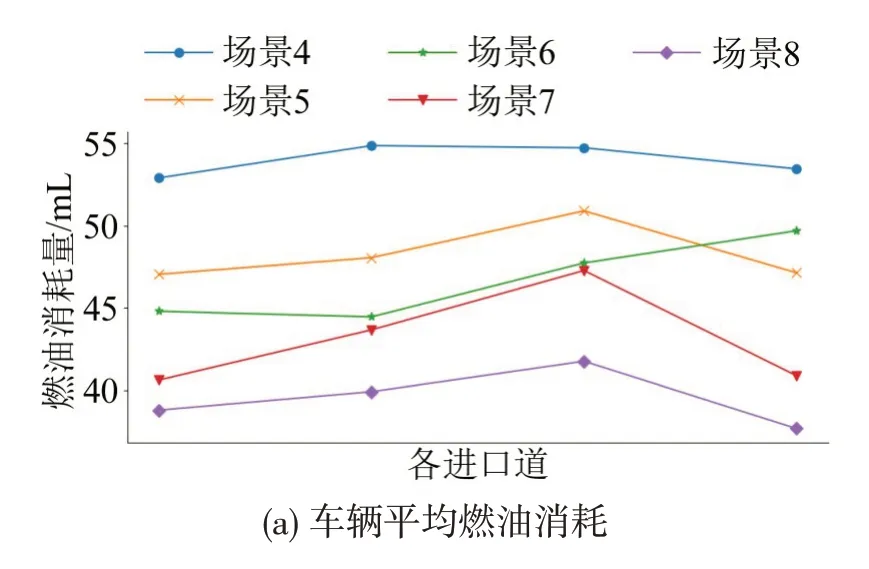
针对场景4~场景8,渗透率对于车辆燃油消耗和车辆平均速度的敏感性分析结果如图5和表4所示。从图5和表4可以看出,渗透率与燃油消耗量呈负相关,渗透率越高,车辆燃油消耗越少;渗透率越高,车辆的平均速度越大,平均行程时间越短,通行效率越高。另外,虽然个别车道存在渗透率增加而行程时间边长以及平均速度减小的情况,但从整体来看,较高的渗透率必然对降低油耗以及提升交叉口通行能力具有重要影响。

表4 场景4~场景8各个车道平均结果Table 4 Mean results of case 4 to case 8
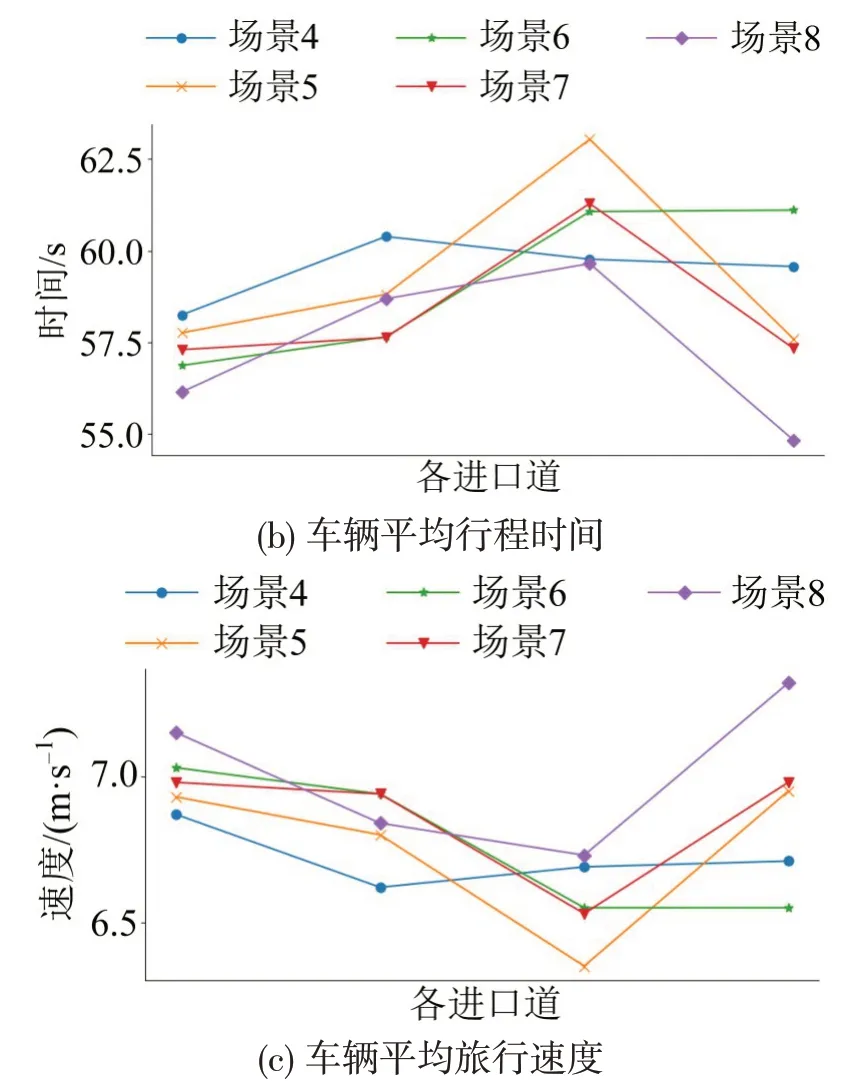
图5 场景4~场景8仿真结果Fig.5 Simulation results of case 4 to case 8
5 结论
本文在城市单信号交叉口场景下,以自动驾驶车辆燃油消耗最小和终端时刻车辆速度最大为目标,对混合交通环境下的自动驾驶车辆轨迹进行滚动优化,并通过SUMO 仿真验证了模型的有效性,得到以下主要结论:
(1)通过仿真建模分析可知,本文提出的混合交通环境下的自动驾驶车辆轨迹优化模型可以大幅度降低道路上车辆整体的燃油消耗和污染物排放,提高车队整体的行驶速度,提升信号交叉口通行效率,模型有效性得到验证。
(3)混合交通环境下,道路整体燃油消耗降低和通行能力增加的主要原因在于自动驾驶车辆通过滚动优化自身的加速度和速度,直接影响人工驾驶车辆的驾驶行为,避免了在交叉口前停车等待绿灯信号的无意义消耗。
混合交通流环境下,信号相位与自动驾驶车辆轨迹协同优化以及多交叉口自动驾驶车辆轨迹优化是进一步的研究内容。
猜你喜欢
昆钢科技(2022年4期)2022-12-30
建材发展导向(2022年14期)2022-08-19
昆钢科技(2022年1期)2022-04-19
建材发展导向(2021年19期)2021-12-06
浙江大学学报(理学版)(2021年4期)2021-07-21
发电技术(2021年1期)2021-03-16
昆钢科技(2021年6期)2021-03-09
天津建设科技(2020年2期)2020-05-13
煤炭工程(2019年12期)2019-12-24
小学科学(学生版)(2019年4期)2019-05-11
