
等离子体合成射流激励器及其流动控制技术研究进展
2022-04-26 01:45:42周岩罗振兵王林夏智勋高天翔谢玮邓雄彭文强程盼
航空学报 2022年3期
周岩,罗振兵,王林,夏智勋,高天翔,谢玮,邓雄,彭文强,程盼
国防科技大学 空天科学学院,长沙 410073
自20世纪90年代开始,气体放电等离子体及其应用技术发展迅速,相关研究和应用领域涵盖从材料处理到生物医学等诸多领域,等离子体流动控制技术便是其中之一。等离子体流动控制指的是利用等离子体在电磁场力作用下运动或气体放电引起压力、温度变化的特性,对流场施加可控扰动的一种新概念主动流动控制技术,它具有激励频带宽、响应时间短、无运动部件等优点,有望显著提升飞行器/发动机气动特性。《简氏防务周刊》指出,等离子体流动控制对于飞行器空气动力特性的改变将引发一场“军用和商业飞行器的革命”。以等离子体气动激励为代表的主动流动控制技术被美国航空航天学会(AIAA)列为10项航空航天前沿技术之一。
根据激励器结构、放电原理和等离子体特性的不同,等离子体流动控制激励器分为介质阻挡放电(Dielectric Barrier Discharge, DBD)等离子体激励器、电弧放电等离子体激励器、电晕放电等离子体激励器、微波放电等离子体激励器、激光电离等离子体激励器、组合放电和其他新型等离子体激励器。其中DBD和电弧放电等离子体激励器是目前国内外研究最为广泛的两类等离子体激励器。DBD激励器由被绝缘介质材料覆盖的植入电极和暴露在大气环境下的暴露电极组成,其主要机理是电流体动力(EHD)效应,由于DBD放电产生的电动力学体积力较小,诱导形成的射流速度一般较低,因此主要应用于低速流场的流动控制研究。电弧放电等离子体激励器主要机理是通过电弧放电产生气体焦耳加热,对流场形成温度、压力扰动,主要分为两种类型,一类是通过表面裸露的阳极、阴极在开放空间电弧放电的激励器,另一类是在半封闭容腔内电弧放电的等离子体合成射流(Plasma Synthetic Jet, PSJ)激励器。
等离子体合成射流激励器又称为火花射流(SparkJet)激励器或脉冲等离子体射流(Pulsed-Plasma Jet)激励器,它由一个开有出口孔缝的绝缘腔体和一组电极组成,放电是在小腔体内进行,气体焦耳加热作用使得腔内气体的温度和压力快速升高,升温加压后的腔内气体从出口高速喷出,形成用于流场操控的等离子体射流。其结构及工作过程如图1所示,工作周期分为以下3个阶段:① 能量沉积阶段,通过外接驱动电源给激励器充电,当电极间电势差达到激励器腔体内空气击穿电压时,形成火花电弧放电使得腔体内空气发生电离,实现电能向热能的转化;② 射流喷出阶段,气体焦耳加热导致腔体内温度和压力急剧升高,高温高压气体通过激励器孔/缝高速喷出,形成高速热射流、涡环及前驱激波;③ 吸气复原阶段,由于射流喷出及腔体内气体与外部环境之间的对流和辐射传热,腔体内气体的温度和压力下降,外部气体重新充填腔体,为下一个循环做准备。需要说明的是,激励器的能量沉积与射流喷出两个阶段可能会存在重叠,例如当火花电弧放电的时间较长或者放电位置离出口较近时,在放电结束之前已经有部分气体从出口喷出。射流喷出与吸气复原阶段并非只有一次,而是可能交替出现多次,这是由于射流的惯性作用,吸气复原(或射流喷出)阶段的末尾,激励器腔体内气压会略高于(或略低于)外界环境气压,激励器构成一个欠阻尼系统。激励器启动后经过若干工作循环,将到达稳定工作状态,在出口处产生速度、温度周期性变化的脉冲射流。尽管激励器能够对外部流场施加动量注入,但在一个工作循环中通过激励器出口的静质量流量为零,因此所产生的射流是一种零质量合成射流。按照内外压差建立方式分类,PSJ激励器是一种升温型合成射流激励器。需要注意的是,图2所示的由环形电极构成的DBD激励器,由于能够诱导形成垂直于壁面的射流,因此在文献[26-28]中也被称之为等离子体合成射流激励器,这种激励器不在本文的介绍范围内。

图1 等离子体合成射流激励器结构及工作过程Fig.1 Structure and working process of PSJ actuator
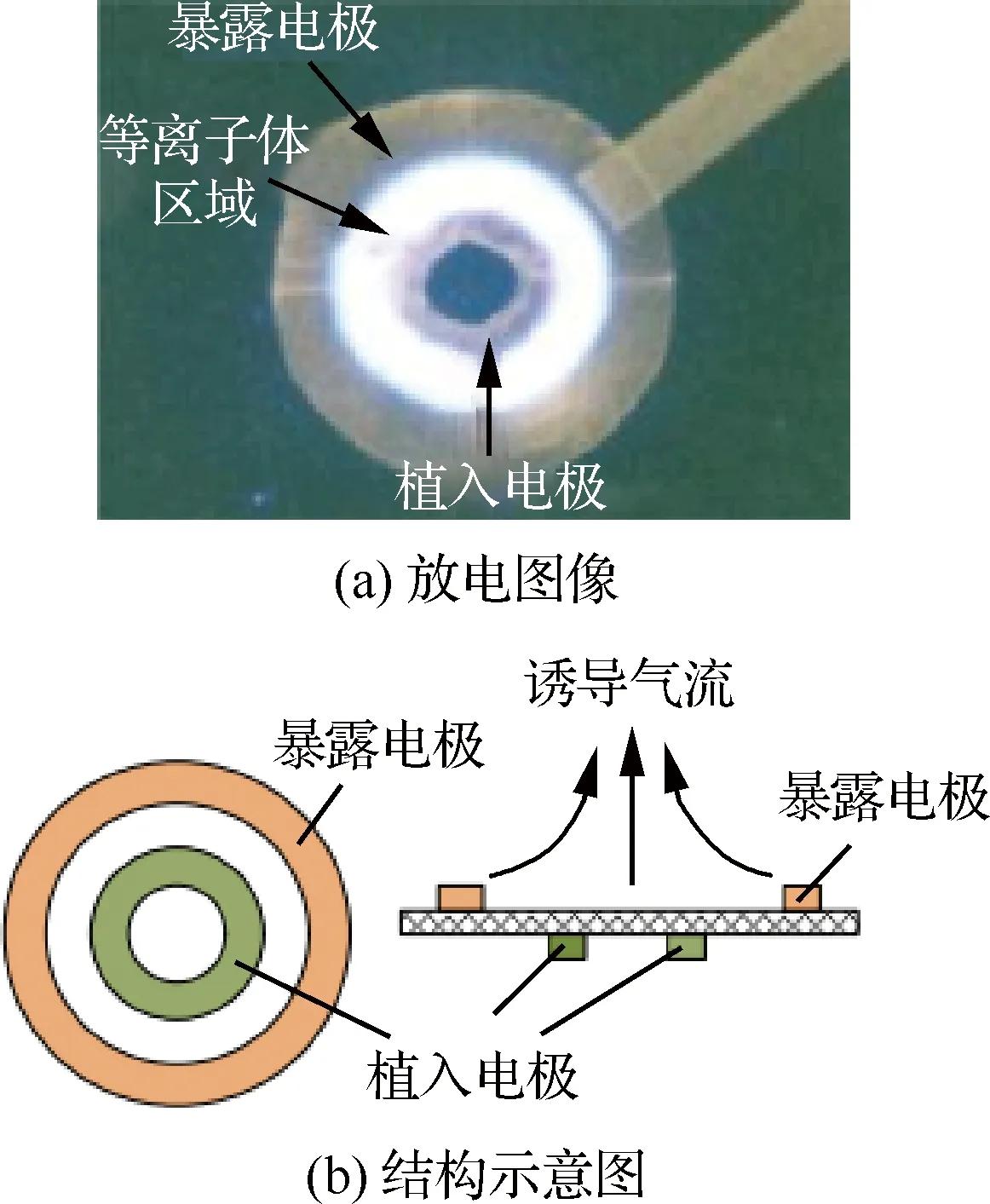
图2 介质阻挡放电等离子体合成射流激励器[26-28]Fig.2 Dielectric barrier discharge plasma synthetic jet actuator[26-28]
作为一种应用前景广泛的新型主动流动控制装置,PSJ激励器具有射流速度高(接近600 m/s)、边界层穿透能力强、响应速度快(几十微秒)、激励频带宽(0 Hz~10 kHz)、无活动部件等优势。相比于有源射流、边界层抽吸,PSJ激励器通过加热环境流场中的气体工质产生控制射流,因此无需输气管路、控制阀门以及高压气瓶、空气压缩机、真空泵等供应装置,有利于减小系统的体积和重量。相比于表面电弧放电等离子体激励器,PSJ激励器的放电电弧位于半封闭腔体内,不存在电弧被高速气流吹向下游直至熄灭的问题,因此放电过程更为稳定。自2003年出现以来,PSJ激励器经历了快速发展,吸引了国内外数十个研究机构的广泛关注,包括约翰霍普金斯大学应用物理实验室(JHU-APL)、德克萨斯大学奥斯汀分校(UTA)、法国航空航天科研局(ONERA)、佛罗里达州立大学和佛罗里达农工大学、伊利诺伊大学香槟分校、罗格斯大学新布朗斯维克分校、代尔夫特理工大学、国防科技大学、空军工程大学、南京航空航天大学、厦门大学、北京航空航天大学、中国科学院电工研究所、南京理工大学和其他众多机构的研究团队开展了大量工作。
本文对PSJ激励器近些年来的研究进展进行了综述:第1节对PSJ系统(包括激励器及电路设计)的发展进行了介绍,第2节总结了PSJ技术研究中发展的理论分析、数值模拟和实验测量手段,第3节和第4节介绍了PSJ激励器的能量效率特性和静态流场工作特性,第5节介绍了PSJ技术在横向主流干扰、分离流控制、射流噪声抑制、激波控制和激波/边界层干扰控制等方面的应用研究。
1 等离子体合成射流激励器系统
1.1 单个激励器系统
1.1.1 两电极和三电极激励器
约翰霍普金斯大学应用物理实验室的Grossman等在2003年首先开展了PSJ激励器的研究,第1代用于概念验证的激励器构型如图3(a) 所示,激励器腔体为绝缘陶瓷,尖端阴极从腔体底面插入,顶部为开有射流出口的阳极,腔体底部嵌入了一层栅极。高压电源最初加载于阳极与阴极之间,在需要放电时通过一个低功率、限流的转接开关短暂的加载于栅极与阴极之间,使得栅极与阴极之间产生微弱放电,产生大量电子,触发阳极与阴极之间的主放电。第1代激励器气体击穿放电为非可控放电方式,击穿电压较低,频率不可任意调整,实验测量射流速度100 m/s 左右,频率100 Hz,为了实现激励器阵列工作,JHU-APL团队还提出了如图3(b)所示的激励器阵列设计方案。为了简化系统结构和提升放电的稳定性及灵活性,JHU-APL团队在2004年又设计了如图4所示的第2代激励器及驱动电源。第2代激励器为两电极结构,移除了壁面底部的栅极,由于多次放电对第1代激励器尖端阴极烧蚀严重,基于激励器寿命的考虑将阴极改用钝头,陶瓷基地与金属阳极之间不再用粘合剂而是采用螺纹安装,简化了装配过程,使其更加坚固耐用,此外增加了可替换部件以方便改变腔体体积和出口孔径。采用了如图4(b)所示简单灵活的电路设计,高压直流源与放电电容和激励器组成的并联电路连接,高压直流源以限流模式工作,其安全电压设定为放电电容的最大工作电压;可调功率电阻用于改变电容的充电速度,同时为电路提供短路保护。
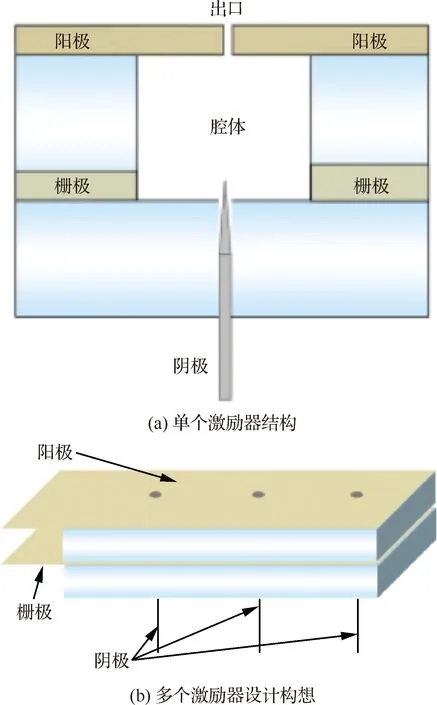
图3 约翰霍普金斯大学第1代PSJ激励器[24]Fig.3 The first generation PSJ actuator of JHU[24]

图4 约翰霍普金斯大学第2代PSJ激励器[30-31]Fig.4 The second generation PSJ actuator of JHU[30-31]
德克萨斯大学奥斯汀分校的Narayanaswamy等针对JHU-APL两电极激励器系统的放电电路进行了优化,设计了如图5所示的PSJ激励器高频放电电路,在系统中增加了基于MOSFET(金属-氧化物半导体场效应晶体管)的开关电路来控制放电通断,这种方式可以较为精确地控制放电持续时间,并且凭借MOSFET器件的快速响应特性可以大大提升激励器放电的频率,在不考虑腔体回填速率限制的情况下,电路系统自身的放电频率可以达到100 kHz量级。此外,UTA研究团队还对激励器壁面材料进行了改进,发现氮化硼壁面材料相比陶瓷材料具有更好的散热能力,采用氮化硼制作的激励器在相同放电条件下能够产生更高速度的射流。
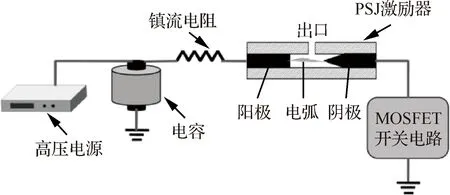
图5 德克萨斯大学奥斯汀分校两电极PSJ激励器高频放电电路[45]Fig.5 High-frequency discharge circuit of UTA two-electrode PSJ actuator[45]
法国航空航天科研局与图卢兹大学的研究团队研制了与JHU-APL结构相似的两电极PSJ激励器,如图6所示,对JHU-APL的PSJ激励器腔体结构和材料进行了改进,加强了腔体壁面散热,提高了放电频率与能量沉积速度,使激励器工作频率提高到kHz,射流速度达到300 m/s。此外,ONERA研究团队针对PSJ激励器的驱动电源开展了深入研究,对比了如图7所示2种类型驱动电路,即电感供能型电路(Inductive Power Supply, IPS)和电容供能型电路(Capacitive Power Supply, CPS)。IPS是脉冲变压器的副边直接与PSJ激励器相连,能量积累在线圈的电感上,放电时将电感上储备的能量释放。CPS是脉冲变压器副边串联一个电阻,并联一个储能电容,然后连接PSJ激励器,能量积累在电容上,放电时将电容上的能量快速释放。实验中使用的PSJ激励器电极间距为1.2 mm,结果表明IPS在PSJ激励器上放电的峰值电流约为30 A,CPS的放电峰值电流约为250 A。IPS在放电时可以等效为一个恒压源,放电电压较低,放电电流小,放电时间长,能量释放速度慢,对激励器壁面的加热更为严重。CPS可以产生脉冲放电,放电方式类似于火花放电,放电电流大,能量释放速度极快。能量释放速度越快,射流喷射速度越高,喷射时间越短,通过壁面的热损失越小,因此CPS类型的驱动电源能够有效提高射流速度和激励器能量效率,目前PSJ激励器的研究中也绝大多数采用CPS类型的驱动电源。

图6 法国航空航天科研局两电极PSJ激励器[56, 61]Fig.6 Two-electrode PSJ actuator of ONERA[56, 61]

图7 两电极PSJ激励器电路类型[56]Fig.7 Circuit type of two-electrode PSJ actuator[56]
综合JHU-APL、UTA与ONERA研究团队的驱动电源电路可以发现,有两种基本电路方案可以用于PSJ激励器:第1种是采用将整流后的高压电源、IGBT或MOSFET开关直接与PSJ激励器连接(图4(b)、图5);第2种是由低压直流电源、高压脉冲变压器、开关电路组成,通过逆向变换电路为PSJ激励器供电(图7)。第1种方式结构相对简单,但是对于开关器件的要求较高,并且由于镇流电阻通常直接连接于高压电源、激励器之间,因此放电效率较低。
在前期研究中,JHU-APL、UTA与ONERA研究团队普遍采用了两电极PSJ激励器,这种激励器结构简单,但也存在一些缺陷:两电极激励器依靠在阳极、阴极之间施加较高电压直接触发气体放电,击穿电压较高,增加了驱动电路成本、复杂度和放电带来的电磁干扰;为了减小空气击穿的难度,电极间距一般较小因而限制了电弧加热区域和激励器腔体体积大小;激励器的放电电容能量与击穿电压的平方呈正比,击穿电压主要取决于电极间距与环境气压,因此无法通过调节电路参数改变击穿电压从而改变输入能量;由于腔内气体温度和压力的波动、电极尖端的烧蚀和氧化、气体击穿过程本身的不确定性等原因,激励器的击穿电压存在显著的波动(可高达千伏量级),这使得每次放电的能量大小也产生较大波动,不利于激励器的稳定重复工作,为实验测量和实际使用增加了不确定性;此外,击穿放电时刻的不确定性也给激励器与实验诊断设备(如高速相机、PIV)之间的同步带来了困难。
为了增大电极间距、降低击穿电压以及更为精确的控制放电时刻,受JHU-APL团队第1代激励器中栅极电极的启发,Haack以及罗振兵等开展了新型三电极PSJ激励器的研究,三电极PSJ激励器外形及其驱动电源系统如图8所示,该激励器的组成仍包括两个部分:电极和绝缘介质,但相对于两电极PSJ激励器的结构,增加了一个触发电极。三电极PSJ激励器通过在触发电极和阴极间形成电子流并在两电极间建立微放电通道,诱导激励器阳极/阴极间低电压大功率的电弧放电,实现了高频、高电压与大电流放电的解耦,实验结果显示激励器工作击穿电压大幅降低(从3 kV/mm降至0.8 kV/mm),最大射流速度超过500 m/s。当驱动电源输出高压范围有限时,在相同击穿电压的条件下,三电极PSJ激励器的阳极/阴极间距可以做的更大,因此放电电弧长度增大,此外对比如图9所示两电极与三电极放电电弧结构可以发现,三电极激励器的放电电弧通道并不是在原有的阳极/阴极间建立,而是沿阴极-触发电极-阳极的路径建立,这进一步增大了放电电弧的长度,进而增大放电电弧电阻,提高了放电效率与电弧能量;电弧长度的增大使得激励器腔内气体加热更为充分,提高了气体加热效率,增大了激励器腔体体积。
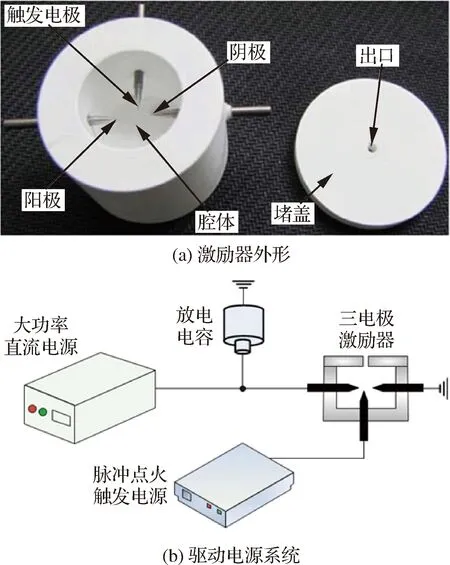
图8 三电极PSJ激励器[94]Fig.8 Three-electrode PSJ actuator[94]

1—阳极; 3—阴极; 5—点火电极图9 PSJ激励器电弧Fig.9 Arc of PSJ actuator
JHU-APL联合佛罗里达州立大学(FSU)团队进一步对三电极激励器做了改进,提出了伪串联(Pseudo-Series)点火三电极PSJ激励器,如图10所示,将三电极激励器的阳极和点火电极合二为一,使两套电源共用一个输出,在保留三电极激励器性能的同时简化了结构、提高了可靠性。伪串联点火激励器驱动电路如图11所示,电路分为主放电电路与触发点火电路,采用各自独立的直流源供电。主放电电路直流电源直接为并联在阳极、阴极的储能电容充电,充电电流的大小决定了储能电容的充电时间,进而决定了激励器的放电频率,实验中电源最大频率约为1 kHz。主放电电路直流电源输出电压通常设置为600 V,其原因是600 V是常用电压,器件成本低、便于选择。触发点火电路如图中蓝色虚线框内所示,当输入高电平为10 V的脉冲信号时,MOSFET开关将会闭合,因此电流将通过变压器原边,并在副边产生10 kV的高压,从而击穿阳极、阴极之间空气,进而使得主放电进行。为了防止触发点火电路的高电压输出信号对主放电电路产生干扰,在连接处加入了高电压大电流阻流二极管。伪串联点火激励器由于点火火花(Trigger Spark)更长,可以更加有效的降低空气击穿起弧的电压,在电源电压一定时增大电极的间距。电源输出电压为600 V时,原三电极激励器阳极/阴极间距最大1.7 mm,伪串联点火激励器可达4 mm以上。由于电弧长度变长、电阻增大,激励器能量效率进一步提高,在相同注入能量条件下,由腔体峰值压强测量得到的激励器效率从30%提升至75%。
图10 三电极激励器与伪串联点火三电极激励器[42]Fig.10 Three-electrode and pseudo-series three-electrode PSJ actuator[42]

图11 伪串联点火三电极激励器电路[44]Fig.11 Circuit of pseudo-series three-electrode PSJ actuator[44]
为了降低PSJ激励器的击穿电压和提高激励器的放电效率,Miao等提出了一种半导体增强型等离子体合成射流激励器,该激励器在氧化铝陶瓷放电腔体的内壁面增加了一层特殊的半导体材料包覆层,包覆层的主要成分为CuO,通过高温烧结方法包覆在放电腔体内壁面上。由于半导体材料存在的表面闪络(Surface Flashover)现象,该包覆层的存在会显著改变气体间隙的放电特性。对于无包覆、电极间距6 mm的激励器,理论上的击穿电压高达16.8 kV,而对于有包覆、电极间距6 mm的激励器,实验结果表明其击穿电压仅有2.64 kV,并且在环境压力50~100 kPa范围内击穿电压相对保持稳定,不会出现大幅下降。由于该方法能够大大延长电极间距,因此可以在不改变电源的情况下大幅提升激励器的放电效率,为PSJ激励器的发展提供了一种新的技术路径。
1.1.2 腔体增压型激励器
作为一种合成射流激励器,PSJ激励器需要利用腔体内已经存在的工质产生控制射流,因此保证腔体内有足够的工质是激励器有效工作的核心要素之一。但是,由于两个方面的原因,激励器常常面临使用工质不足的困境。一方面源于激励器的吸气复原速率。两电极及三电极PSJ激励器都存在吸气复原速率较低、饱和工作频率受限的问题,激励器的能量沉积、射流喷出阶段进行时间短、工作效率较高,而最后一个阶段即腔体复原阶段是依靠腔体内的负压完成的,所需时间长且回填效率较低,导致激励器高频条件工作时性能下降,甚至出现所谓的“哑火”现象,并且数值结果显示,在超声速条件下工作时由于主流的惯性作用,激励器将更加难以利用腔体内的负压将主流气体吸入腔体,因此腔体回填速率要比在静止条件下工作时进一步。另一个导致激励器使用工质不足的原因来自于高空稀薄流场环境的挑战,这也暴露了激励器在环境适应性方面的问题。风洞试验显示激励器在高超声速流场中工作性能大幅降低,这是由于在高空、高超声速稀薄流场环境下,一方面激励器腔体内气体工质减少、产生射流流量减小,另一方面放电强度减弱且电能到气体内能转化效率降低,因此激励器的控制能力大大减弱。
为了提高激励器的吸气复原速率,刘汝兵等提出了一种单向阀补气的激励器构型,如图12所示,在常规火花放电式等离子体射流发生器腔体上连接单向阀,改善发生器吸气复原阶段的补气量和射流的连续性,以获得能量更高的合成射流,其优点是可选用构造小巧、安装简单的单向阀来实现对火花等离子体射流发生器的补气,而且无需外加动力。实验结果显示加入单向阀后PSJ最大速度可提高20%以上,不同单向阀测试结果表明,对于确定构型的PSJ激励器存在最佳的单向阀公称通径。

图12 单向阀补气的激励器构型[143]Fig.12 Configuration of one-way check valve air supply actuator[143]
李晋峰等提出了一种将压电振子与气体放电组合的合成射流激励器构型,通过压电振子对腔体体积的调控作用提高腔体吸气复原的能力,激励器结构示意图如图13所示。组合型激励器一方面通过压电振子与气体放电压缩腔体的组合作用进一步提高了激励器的射流速度,另一方面,在吸气复原阶段通过压电振子扩张腔体可以一定程度上增大腔体吸气的能力,提高吸气复原的速率。初步数值模拟结果显示,压电振子振幅越大,改善效果越明显,当压电振子振幅为0.35 mm时,激励器的射流峰值速度相比PSJ激励器提高1.82倍,在第一个吸气周期内,激励器腔体内气体便可恢复至放电前初始状态,吸气复原速率提高约5.78%。
图13 压电振子与气体放电组合的合成射流激励器[151]Fig.13 A combination of piezo-driven and air discharge synthetic jet actuator[151]

图14 冲压式PSJ激励器[104]Fig.14 Ram-air plasma synthetic jet actuator[104]
借鉴冲压发动机的原理,罗振兵等提出了如图14所示的冲压式PSJ激励器。相比传统PSJ激励器,冲压式激励器的主要特点是增加了安装于主射流出口上游、朝向来流方向的冲压进气道,其工作原理是通过冲压进气道引入一股高速来流,并经电弧放电向其注入能量,通过“借力过程”(高速来流冲压)和“接力过程”(电弧放电的气体加热)的作用,形成一股用于高速流场控制的高能脉冲射流。激励器的工作过程分为冲压进气、能量接力和射流喷出3个阶段,如图14(b)所示:① 冲压进气阶段,上游的高速气流被激励器的冲压进气道收集入腔体,使腔体内气体工质迅速填满并增压(气体工质主要从冲压进气道进入腔体,少部分从主射流出口进入腔体);② 能量接力阶段,气体击穿放电,放电过程实现了外部电能到气体内能的接力,使得气体迅速加热和膨胀,致使得腔体内压力进一步升高;③ 射流喷出阶段,气体膨胀升压后从主射流出口高速喷出形成PSJ。理论计算显示冲压式PSJ激励器如果能够充分利用高超声速来流动压,其增压效果将十分明显,在30 km高度马赫数=5流动条件下,静压只有1 200 Pa,而动压则高达21 000 Pa(17.5倍静压)。周岩等开展了初步数值仿真,结果显示冲压式激励器在=4超声速流中放电前的腔体初始气体密度增加60%,腔体回填阶段平均质量流率可提高约85%。下一步,冲压式激励器的进气道还需要进一步优化设计,以减小不同飞行姿态、马赫数条件下来流波系的影响,以及边界层流动对尺寸较小的冲压进气道入口的影响,达到较优的增压进气效果。
为增加激励器腔体的工质,Emerick等设计并实验了新型充气式PSJ激励器(如图15所示),通过外部高压气源(气体压缩机或高压气瓶)为激励器腔体供气以提高其控制性能,气源与腔体之间加入一个Swagelok单向提升阀防止回流,初步实验结果显示激励器在高频工作时的性能显著改善,但外部高压气源的存在大大增加了系统的体积、重量。对此,罗振兵等提出了一种基于高超声速流能量综合利用的三电极PSJ系统方案,如图16(a)所示,由集气腔、管道、阀门、热电材料、PSJ激励器和电源系统等组成。其能量综合利用过程示意如图16(b)所示:① 集气腔将高超声速来流动能转化为集气腔内气体的势能(压能),并通过管路对PSJ激励器提供高压气源,即通过高超声速流气动力增压供气;② 高超声速流对飞行器头部气动加热,其动能转化为热能,通过头部的热电转换材料将热能转化为电能,并储存在电源系统中,电源系统对PSJ激励器提供电能,即通过高超声速流气动热转化供能;③ PSJ激励器通过电极放电,将电能转化为激励器腔内气体势能(压能),高压气体从激励器出口喷出转化为高速合成射流的动能。简而言之,高超声速流通过能量综合利用转化成了高能合成射流。该系统无需额外能源和气源,避免了系统体积、重量的增加,是一种全新的“零能耗、零质量”合成射流技术。基于高超声速流能量综合利用PSJ激励器的设计思想,笔者团队设计了如图17所示高超声速流场增压PSJ激励器,并在高超声速流场中开展了实验验证。结果显示高超声速流场增压设计可以显著提升激励器的流场控制能力,但发现充气射流与气体放电射流控制效果之间存在耦合,并且充气气压较高时充气射流与三电极放电之间存在复杂干扰作用导致放电异常。

图15 佛罗里达州立大学充气式PSJ激励器[68-70]Fig.15 Air supply plasma synthetic jet actuator of Florida State University[68-70]

图16 基于高超声速流能量综合利用的PSJ系统[91]Fig.16 PSJ system based on energy comprehensive utilization[91]
图17 高超声速流场增压PSJ激励器[107]Fig.17 Hypersonic flowfield pressurized plasma synthetic jet actuator[107]
1.2 激励器阵列系统
对于介质阻挡放电(DBD)等离子体激励器,单个激励器可以制作很长,在纵向布满整个机翼或压缩拐角,从而实现空间大范围的流动控制。但是单个PSJ激励器的控制区域十分有限,只能覆盖射流出口附近区域,而为了产生较高速度的射流,射流出口尺寸不能太大。因此,在实际应用中为了拓展控制范围、提高控制能力,需要采用多个PSJ激励器构成的阵列进行协同工作。在研究早期,对于PSJ的研究基本局限在单个激励器,但是随着对PSJ实用化要求的不断提高,近年来国内外学者逐渐开展了PSJ激励器阵列的研究。根据连接方式不同,PSJ激励器阵列可以分为串联式与并联式两种类型,下面分别展开介绍。
1.2.1 串联式阵列
周岩等在两电极PSJ激励器基础上开展了激励器阵列研究,实验中发现将多个两电极PSJ激励器串联后接入容性放电电源(图18(a)),当施加电源电压足够高时,激励器可以被同时击穿,产生PSJ阵列,通过这种方式可以实现结构最简单的直接串联式PSJ激励器阵列。不同串联参数工况的实验发现,直接串联式阵列击穿所需要的电压与串联的总的气体间隙长度成正比,与串联激励器的数目、串联序列中最大或最小电极间距、不同间距激励器的连接顺序等因素无关。结合高速摄影与电压/电流测量两者的结果发现,直接串联式阵列在大电流电弧放电之前,直连电极(直接与电源连接的两个电极)和悬浮电极之间首先发生微弱的预放电,正是由于预放电使得悬浮电极上出现正或负的脉冲电势,悬浮电极之间产生大的电势差,导致其中空气击穿。通过对开关器件性能的升级,中国科学院电工研究所设计了基于开关切断原理的纳秒脉冲两电极PSJ激励器串联电路,实现了串联式阵列的纳秒脉冲(上升沿≤20 ns,脉宽150 ns)放电,重复频率可达5 kHz,阵列各激励器之间的击穿延迟在20 ns以内,该电路的核心是采用了德国BEHLKE公司生产的HTS B2系列开关,该高性能开关具有高重复频率、纳秒级上升时间、开关恢复时间短、延迟抖动小、耐受电流大、开关阻抗低、电磁兼容性能好等优势,因此十分适合用于PSJ阵列大电流放电的脉冲源研制。基于图11所示的伪串联(Pseudo-Series)点火三电极PSJ激励器,代尔夫特理工大学研究团队开展了伪串联点火三电极PSJ激励器串联放电的研究,其电路如图18(b)所示,对不同串联激励器个数的研究显示,在相同电容能量条件下,多个激励器串联后产生的总冲量和总射流动能均高于单个激励器,表明串联激励器的能量利用效率高于单个激励器,且串联个数为4时候的激励器阵列工作效率最佳。
图18 串联式PSJ激励器电路Fig.18 Series circuit of PSJ actuator
图18所示的直接串联式阵列具有结构简单、易于实现的优点,但缺点是会导致击穿电压增大,特别是在串联激励器数目较多的时候。张志波等提出了如图19(a)所示的基于电压接力(Voltage Relay)的两电极PSJ激励器串联电路,此方式采用放电回路阻抗主动调控的方法,推迟负载(即PSJ激励器)由正阻抗向负阻抗转化的时间,使得输入高压依次加载到串联的各个气体间隙,在多个气体间隙顺次发生击穿后同步进行能量沉积。电压接力串联阵列的击穿电压仅由第一级电极间隙决定,接力电容、卸荷电阻的引入并不会增加所需电压。基于电压接力电路,张志波等开展了多激励器串联阵列研究,此外,基于此种放电方式,张志波等还提出了图19(b)的单腔多电极PSJ激励器,这种激励器可以使得电弧长度增加、电阻增大,并提高电弧对腔体气体加热的均匀度,因此有助于提高激励器的能量效率。

图19 电压接力两电极PSJ激励器串联电路及其单腔多电极PSJ激励器[129]Fig.19 Series circuit of voltage relay two-electrode PSJ actuator and multi-electrode PSJ actuator[129]
1.2.2 并联式阵列
与表面电弧放电激励器相同,PSJ激励器的放电形式主要为脉冲电弧放电(火花电弧放电)。放电过程中,等离子体通道的伏安特性曲线表现出明显的负阻抗特性,即随着空气击穿、放电电流增大,电弧两端电压迅速下降。若将多个PSJ激励器直接并联在一起的话,击穿放电一般只能发生于一个激励器(即第1个发生击穿的激励器),其余并联的激励器由于电压迅速下降而无法击穿放电。因此,PSJ激励器无法像介质阻挡放电激励器一样并联工作,需要对电路进行特殊设计。
ONERA首先开展了PSJ激励器并联阵列的研究,为了实现并联放电,研究人员采用了多个独立的电源,每一个PSJ激励器都配备一个独立的高压电源电路。根据文献[23],为了将PSJ并联阵列用于射流噪声抑制,实验中采用了6个独立的高压电源驱动6个PSJ激励器工作。这种并联方式简单直接,其优点是各个激励器的开闭状态、工作频率、工作相位等都可单独控制,因此其控制特性更加灵活、控制效果更为可控,例如多个激励器以一定相位差工作的方式可以实现激励频率的倍增,突破吸气复原对激励频率的限制,但是这种方式会带来电源体积重量大、系统复杂的问题。
美国俄亥俄州立大学在表面电弧等离子体激励器研究中采用了电阻钳流型并联驱动模式,这种模式通过在并联电路中增加大阻值的电阻,减小放电单元伏安特性对并联单元的影响,从而实现了并联式驱动多个电弧放电通道,但由于放电回路中引入大阻值电阻,导致放电效率很低,大部分能量被电阻消耗,仅有少部分转化为电弧能量,并且由于限流电阻功率很大、温度很高,为了保证电阻正常工作需要采用风冷散热降温。采用类似的电阻限流型并联驱动模式,UTA的Greene等实现了两电极PSJ激励器的并联工作,并将其用于入射激波/边界层干扰控制。其电路如图20所示,采用1个2.75 kV的直流电源驱动三路并联PSJ激励器,每个并联支路中加入1个1 kΩ的限流电阻对放电电流进行限制,保证了3个激励器同时工作。在主回路中通过1个IGBT开关控制通断,利用2 Ω的采样电阻对电流波形进行采集,激励器阳极和阴极间距8 mm,电源最高运行频率3 kHz,最大功率10 kW。

图20 UTA电阻限流型三路PSJ激励器并联工作电路[51]Fig.20 UTA three PSJ actuator parallel circuit base on current limiting resistor[51]
中国科学院电工研究所与国防科技大学联合开展了并联PSJ激励器的研究,提出了“一拖三”与“三拖三”两种并联放电方法,并设计了两台脉冲源。其中“一拖三”型电路如图21(a)所示,电源由脉冲触发器、高压脉冲电源、RLC负载匹配电路以及3个PSJ激励器负载构成。脉冲形成方式是大开关切断式,输出一路高压对3个电容充电,同时连接3个激励器实现放电,3个激励器的一端分别与RLC负载匹配电路连接,另一端与地相连,主要原理是放电电容通过RLC匹配电路对PSJ激励器放电。图21(b)为“三拖三”型电路,电源采用脉冲整形压缩式,主要由同步触发模块、3个高压脉冲模块以及3个PSJ激励器负载构成,激励器的一端与一个高压模块的高压端相连,另一端与地相连。同步触发模块主要作用是产生三路同步触发信号使3个高压脉冲模块同步工作;3个高压脉冲模块主要作用是产生三路同步高压脉冲,三路高压分别连接3个激励器实现并联放电。此电源共用了低压调压模块与电桥式整流模块,而高压模块则是完全隔离,由3个完全相同的高压模块构成,其并联思路与ONERA基本类似。实验对比发现,“一拖三”电源结构简单、成本低、能耗小,不需要多个高压模块,但其中核心部件RLC负载匹配电路的设计难度大,并且激励器不能同时放电,会有大约160 μs的放电延迟。“三拖三”电源成本较高,为了增加放电通道数量,需要不断增加高压模块,但原理简单、设计难度低,电放电延迟在纳秒级别,可实现精确同步。

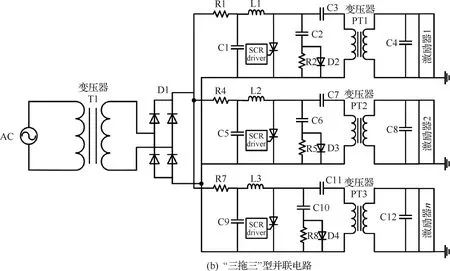
图21 中国科学院电工研究所与国防科技大学PSJ并联电路[146]Fig.21 PSJ parallel circuit of Institute of Electrical Engineering, Chinese Academy of Science and National University of Defense Technology[146]
2 研究手段
2.1 理论计算方法
PSJ激励器工作空间狭小、电磁干扰强、射流持续时间很短且射流流场变化剧烈,这使得激励器的腔体温度、射流温度、质量流量等关键参数不易精确测得。因此,在进行激励器设计和深入揭示激励器工作机理时,采取一定的理论计算及数值仿真方法是十分必要的。按照PSJ激励器的3个工作阶段,文献[84]对激励器的理论分析方法进行了介绍,与之相区分,本文对PSJ激励器研究过程中经常采用的用于评估激励器性能的实用理论计算方法进行了汇总介绍,这些方法常常与实验结果结合使用,以获得对射流峰值速度、腔体参数变化、带电粒子存在时间尺度等特性的初步评估。
射流速度是PSJ最重要的参数之一,为了估算射流速度,ONERA和UTA分别提出了两种理论分析方法。ONERA的方法利用了射流总压与静压关系式,射流速度计算公式为
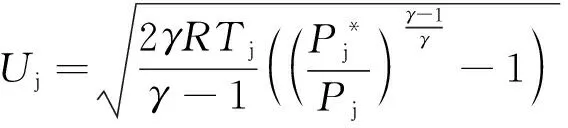
(1)

UTA的方法借鉴了激波管问题的分析,将PSJ激励器腔体等效为激波管的驱动段,将PSJ的快速能量沉积过程等效为激波管的膜片破裂(两者都会产生运动激波)。获得的射流速度计算公式为

(2)
式中:为放电结束后腔体内的声速;为放电结束后腔体内的压强,两者可以通过估计放电后的温升与压升获得;为前驱激波后的压强,可以利用实验中获得的前驱激波传播速度通过激波关系式计算。
为了获得PSJ参数随时间的变化,研究人员将激励器视为零维控制体,建立了不同的非定常零唯解析模型。JHU-APL团队首先开展了这项工作,Grossman等通过对控制体的能量方程进行简化,得到了模拟PSJ激励器能量沉积、气体喷射阶段的非定常零唯解析模型,计算中假设腔体内的状态参数均匀分布,射流出口处于壅塞状态,流动满足等熵关系,气体满足理想气体状态方程,忽略了壁面对流和辐射传热。气体喷射阶段的封闭方程组为
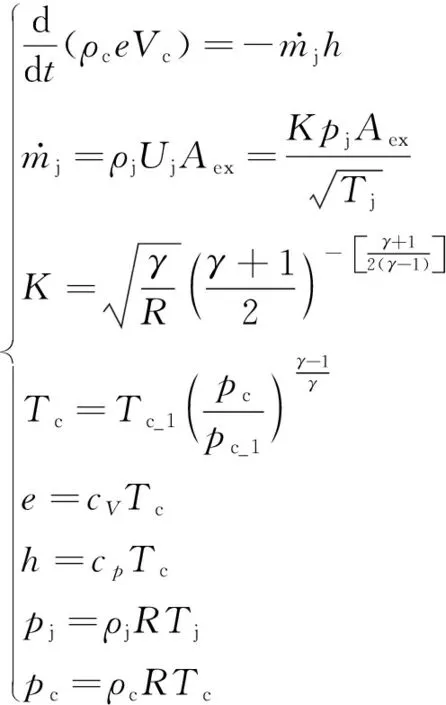
(3)


(4)
式中:表示喉道体积。在气体喷射阶段,和表示腔体内的密度和温度,在腔体复原阶段,密度和温度表示环境气体的密度和温度(此时两者均为常数)。
壅塞和非壅塞过程的出口压强表示为

(5)
文献[39]模型壁面传热计算较为简单,吸气复原很微弱,计算结果没能反映振荡过程,因此仅适合单次射流模拟,不适合模拟连续工作,宗豪华等对文献[39]模型进行了改进,建立了更为详细的集总参数模型(Lumped-Element Model,LEM),该模型基于有限差分法进行热力学方程求解,实现了对壁面对流传热更为准确的计算,将等熵过程改进为多变膨胀过程从而改善了计算的准确性。2015年宗豪华对上述模型进一步完善,为了对脉冲直流放电(放电时间较长)激励器的能量沉积过程进行更为精确的计算,将能量沉积过程视为非定常过程而不是瞬时加热,并且在计算中考虑了比热比和定容比热随温度的变化,采用拟合公式(适用温度范围60~60 000 K,压强范围1 kPa~10 MPa)进行了比热比和定容比热的计算。2018年黄胜方等发展了适用于PSJ激励器阵列的非定常零维解析模型,在以上模型中耦合了多通道放电模型,用于模拟能量沉积过程,计算每个放电通道内的能量沉积。

(6)


(7)
其中:为光谱分析获得的电子温度;反应的指前因子为2.54×10,经验系数为-0.5,两者通过查表获得。
粒子的复合反应时间尺度(带电粒子消耗的时间尺度)采用式(8)计算:
(8)
Narayanaswamy估计带电粒子存在的时间尺度在10 μs量级,阿雷乌斯复合反应速率系数约为1.6×10m。考虑到质量较大的正离子受中性粒子作用较大、随射流喷出较快,而电子受作用较小、喷出速度较低,两者没有很好地混合在一起,因此实际复合反应速率系数会变低,等离子体的生存时间可能会更长。
为了评估放电频率对激励器性能的影响,分析不同放电频率下的激励器腔体内气体平均密度与温度,宗豪华和Kotsonis提出了PSJ激励器热截止频率的概念,其计算方法为

(9)
式中:为腔体内壁面的对流换热系数(PSJ激励器通常约为100 W/(k·m));表示腔体内壁面面积;表示放电加热能量(即第3节中的腔体内气体内能增量);表示环境温度(即腔体内初始温度)。热截止频率表征的是腔体内对流换热速率与放电加热速率之比,基于可以计算得到不同放电频率下的激励器腔体内气体平均密度、温度与环境密度、温度的比值:

(10)
罗格斯大学团队理论分析了PSJ用于飞行控制的可行性,理论计算了单个PSJ激励器的冲量特性,得到了激励器所能产生的无量纲冲量ϑ与激励器无量纲加热能量之间的关系,其中无量纲冲量ϑ、无量纲加热能量的定义为
(11)
(12)
由于射流喷射阶段可以分为壅塞(声速射流)阶段与非壅塞(亚声速射流)阶段,因此无量纲冲量也由两部分组成,式(11)中ϑ表示壅塞阶段的无量纲冲量,ϑ表示非壅塞阶段的无量纲冲量。如前所述式(12)中的分子项表示放电加热能量(即腔体内气体内能增量),分母项是放电前腔体内气体内能的表征。在一维无黏准定常层流流动的假设下,罗格斯大学团队得到了ϑ、ϑ与之间的解析关系式:


(13)


(14)
式中:因数、的计算方法为
(15)
(16)
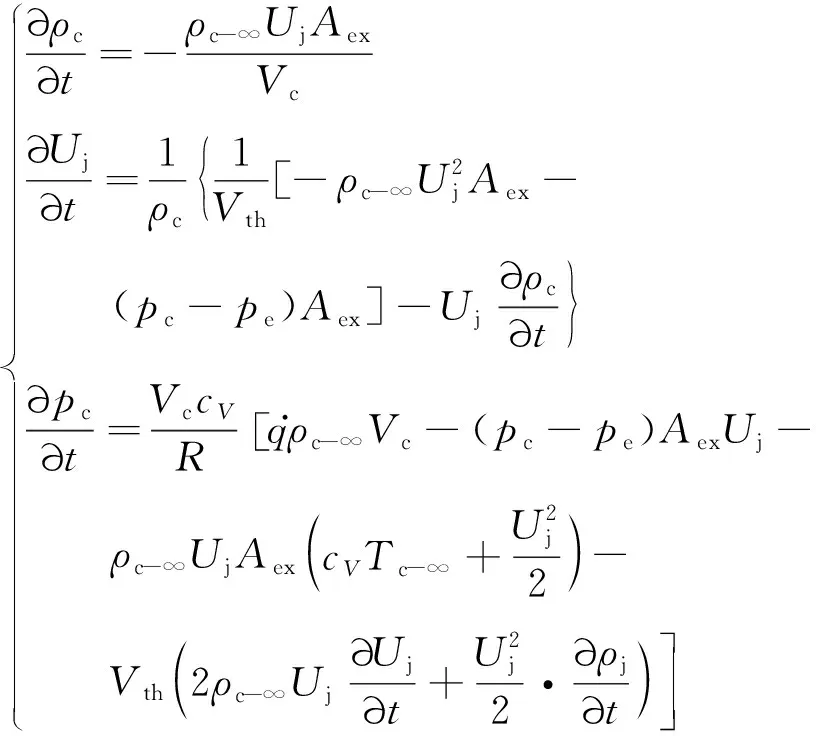
此外,笔者团队为评估高超声速流场增压PSJ激励器可行性,分析其腔体增压效果,将激励器简化为如下模型:高压气体经过一个收缩喷管进入激励器腔体,激励器腔体内气体经过一个收缩喷管喷入外界大气。在以上假设条件下可以理论计算得到高超声速流场增压激励器腔体内压强以及进气、出气的质量流量,理论计算得到的腔体内压强与实验测量结果吻合良好,误差小于2.6%,验证了计算方法的可行性。
2.2 数值仿真
PSJ激励器的数值模拟方法主要包括针对激励器放电电压/电流特性的等效电路模拟和针对激励器射流流场特性的空气动力学模拟、等离子体动力学模拟。
2.2.1 等效电路模拟
等效电路模拟由ONERA提出,该模拟方法认为在空气击穿(时间很短,约ns量级)发生以后,电弧可以等效为一个阻值很小的纯电阻元件,整个放电电路的反应可以近似等效为一个欠阻尼的串联RLC电路。基于以上假设,ONERA采用SPIC软件进行了电路的模拟,得到了放电过程中的电压、电流变化曲线,结果与实验测量较为吻合(图22)。该电路由电容器、电感器和对应于连接线寄生参数的固定电阻器组成,两个串联的可变电阻器分别代表电弧等离子体上的电压降和等离子体鞘层中的能量损失。由于该模型无法捕捉气体击穿过程,应指定在电极间隙(对应于刚刚点燃的放电通道)之间具有非均匀薄高温区初始条件来启动模拟。

图22 等效电路模拟[62-63]Fig.22 Equivalent circuit simulation[62-63]
2.2.2 空气动力学模拟
空气动力学模拟是目前研究最多的一种,它不考虑等离子体放电过程中的复杂粒子反应,认为PSJ产生的物理机制主要为气体放电的焦耳加热作用,因此将放电过程简化为对流场局部小空间的单纯加热过程,通过求解N-S方程模拟加热后激励器腔体内气体的膨胀、喷出、回填过程。第1代空气动力学模拟采用了瞬时加热模型,认为等离子体放电的加热过程相比于射流的形成、发展过程而言很短,可以认为是在瞬间完成的,因此计算时直接在加热区域赋予一个高温高压的初始条件,然后模拟射流流场的形成和演化。发展后的第2代空气动力学模拟认为加热过程是在一定时间内完成的,将放电的能量沉积添加到控制方程的能量源项中,从而模拟气体加热过程和PSJ形成。王林等采用此方法首次开展了PSJ激励器三维流场数值模拟,通过将激励器腔体内放电区域单独定义为一控制体,并且将气体放电过程简化为控制体内的时间、空间均匀能量注入过程(加热功率密度约为4.97×10W/m),实现了PSJ激励器的唯象模拟,PSJ工作周期内速度及涡量的变化过程见图23(a),将计算结果与实验纹影图像进行对比,验证了计算方法的可行性(图23(b)、图23(c))。
第2代空气动力学模拟虽然考虑了有限时间的气体加热过程,但是其加热功率密度的给定比较随机,缺乏依据。ONERA进一步发展了第3代空气动力学模拟方法——基于电磁流体力学(EMHD)的PSJ数值模拟,该方法通过输入实验测得的电压、电流变化曲线,求解电磁场方程,进而计算得到放电过程的焦耳加热量,然后模拟射流的形成过程,相比于第2代模拟方法,其气体的加热过程更加接近实际情况,焦耳加热功率的给予也更有依据。该方法计算模型分为图24所示两个耦合子模型。第1个子模型用于处理阴阳电极之间的电弧放电引起的能量沉积过程,此时模型不包括放电腔体和外部流场,模型描述了阴阳电极之间等离子体的形成,由于电流密度很高、磁场很强,因此假设细长电弧基本保持在轴线附近,简化为二维轴对称问题;这个模型与上述串联RLC等效电路模拟相结合,为RLC模拟提供电导率数据,而串联RLC等效电路模拟为这个模型提供放电电流数据。第2个子模型关注放电腔体内气体的加热以及激励器的实际工作过程,利用第1个子模型中计算的能量沉积分布作为能量源项,计算由此导致的激励器响应结果。
Sary等基于EMHD数值模拟方法和RNS湍流模型开展了PSJ激励器启动后初始25周期连续工作过程的数值模拟,为了较好地捕捉高速射流传播进入低速环境的过程,采用了隐式激波捕捉方法(Roe方法)用于求解流体方程组,放电能量为7 mJ,重复频率为1 kHz,结果显示腔体压强、密度、射流总焓等参数大约在启动后第10个周期达到动态平衡。Laurendeau等基于EMHD数值模拟方法和高精度LES湍流模型捕捉了PSJ激励器单个周期的瞬态发展过程,采用了1 128万非结构网格,时间步长1 ns。数值模拟较好地再现了射流前缘的发展和射流诱导的主要涡结构。图25(a)所示为识别三维射流涡结构和法向密度梯度云图,从中可以观察到射流出口涡环二次涡结构的生成和破碎,以及压力波的存在,图25(b)显示射流前缘的瞬态发展过程与实验取得了很好的吻合。Laurendeau等也将该模型结果与采用恒定能量源项的第2代模拟方法进行了对比,结果显示恒定能量源项模拟得到的射流前缘位置与实验存在更大误差,射流前缘位置相比实验值偏小。相比第2代模拟方法,EMHD数值模拟方法会在能量沉积开始阶段产生更高的能量输入,模拟获得的温升更为迅速,腔体最大压强更大,射流产生更快(约提前2 μs)。对比拉瓦尔出口处的质量流量,两个模型获得的出口质量流量的曲线形状是相似的,只是存在一个时间差,EMHD数值模拟方法获得的质量流量变化幅度更大,导致模拟的喷射质量更大。


图23 PSJ唯象仿真结果[91, 104]Fig.23 Phenomenological simulation results of PSJ[91, 104]
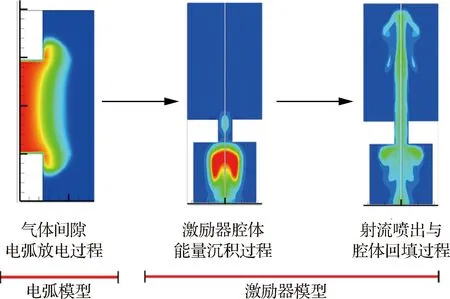
图24 ONERA基于电磁流体力学(EMHD)的PSJ数值模拟计算模型[63]Fig.24 PSJ simulation model of ONERA based on EMHD[63]
除上述3种空气动力学模拟方法之外,对于未来可能的工程应用,JHU还提出了一种更为简化、适合工程实践的空气动力学模拟方法,即虚拟源项(Virtual Source)模型。当模拟PSJ激励器在真实飞行器中的控制效果时,激励器微小尺度(毫米量级)扰动源模拟与外部环境大尺度(米量级或更大)流场干扰模拟之间存在着空间耦合难题,前者时间步长、网格尺寸要比后者精细的多,两者一起模拟导致计算耗费巨大,特别是对于多个激励器协同工作的情况。因此为了在大尺度计算(如真实飞行器流场计算)中加入激励器的模拟,并使得计算量保持在可忍受的范围内,就需要采用这种方法。虚拟源项就是将射流这一扰动源通过边界条件的方式植入,具体射流是怎样产生的不予考虑,边界条件形式通过对单个激励器的精确模拟获得。这种方法曾经用于低速的压电式、电磁式合成射流激励器,但应用于PSJ激励器面临的问题是激励器工作性能(尤其是气体回填阶段的性能)受外部流动环境(如主流速度、边界层等)的影响较大,因此采用一种自适应的虚拟源项,即每一次模拟射流前,通过分析外部流动环境,在模板数据库中找到与之对应的最临近模板。

图25 EMHD数值模拟方法结合高精度LES湍流模型计算结果[64]Fig.25 Simulation results combining EMHD and LES[64]
2.2.3 等离子体动力学模拟
PSJ激励器的等离子体动力学模拟方法是基于电磁学、流体力学、等离子体物理等基本定理,考虑气体放电发生的复杂物理化学过程后的一种更为精确的计算模型。相比于空气动力学模拟,该方法可以获得激励器工作过程中的电磁场分布、粒子数密度、能量传递机制等更为丰富的信息,缺点是计算过程复杂、计算量较大,并且目前对于较大能量、持续时间较长(微秒放电)的放电过程模拟存在一定困难。朱益飞等基于Comsol多物理场耦合求解软件开展了PSJ激励器的等离子体动力学模拟,模拟条件是干空气中纳秒脉冲放电,考虑空气电离时候44个主要粒子反应,对泊松方程(求解电势和电场强度)、化学反应方程、电子能量方程、漂移扩散方程(模拟带电粒子的漂移、扩散运动)和流体力学方程进行了耦合求解,获得了电子密度、约化电场强度、能量沉积的空间分布和时间演化。模拟的PSJ激励器电极间距为3 mm,纳秒脉冲源的上升时间为20~100 ns,放电电压约10 kV,放电电流约20 A。结果显示,气体加热主要来源是粒子碰撞加热和激发态粒子退熄加热,两者的比例约维持在3∶7。在等离子体鞘层内的加热功率密度要远高于在放电通道内,最高可以达到10~10W/m。退熄加热功率密度在大多数区域比粒子碰撞加热功率密度高27~30倍,但是在等离子体鞘层区域,粒子碰撞加热功率密度要高10~1 000倍。PSJ激励器不同时刻的气体加热功率密度如图26所示,在击穿过程中,流注从阴极形成后向上传播,穿透放电间距,在25 ns到达顶面电极,形成放电通道和加热通道。在流注阶段(图26(a)) 能量沉积主要集中于流注头部,一旦放电通道被流注所连接,激励器进入图26(b)和图26(c)所示的火花电弧阶段,能量沉积区域保持稳定,呈现为阴极阳极之间直径1.5 mm左右的圆柱体,加热功率随着电场强度而升高,靠近阴极等离子体鞘层的局部区域具有较高的加热功率密度。脉冲放电结束后,火花电弧阶段结束,加热通道耗散,如图26(d)所示,加热功率降低到10W/m量级,仅仅集中于阴极附近。对不同电压上升沿的模拟结果显示,上升沿缩短,加热能量将显著增加,射流速度、腔体压力和温度随之增大。

图26 等离子体动力学模拟PSJ激励器内部气体加热功率密度(对数坐标,从1012.5~109.5 W/m3)[118]Fig.26 Gas heating power inside PSJ actuator calculated by plasma kinetics model (logarithmic coordinates, 1012.5-109.5 W/m3)[118]
2.3 实验测量
为了获得PSJ激励器的流场结构、射流速度、腔体压力和温度等信息,研究人员采用了纹影/阴影、粒子图像测速法(Particle Image Velocimetry, PIV)、动态压力测量、放电光谱分析等多种多样的测试手段,并且针对PSJ激励器射流持续时间短、流场参数变化剧烈、电磁干扰强等特点,对现有的测试手段的测量精度、时空分辨率、数据后处理方法等进行了改进与创新。
2.3.1 纹影/阴影测量
纹影/阴影测量是针对PSJ激励器最早采用的一种观测方法,也是目前最常用的实验方法之一。纹影/阴影测量基于流体运动导致穿过流体的平行光线发生偏折的原理来实现流场显示的技术,是一种非接触式光学诊断技术,因此受PSJ激励器电磁干扰影响很小,并且由于PSJ属于高温低密度的膨胀气体,与周围气体密度相差较大,因此十分适合通过纹影/阴影进行显示,当纹影/阴影技术与高速相机结合时方可对PSJ流场结构进行较高时空分辨率的观测。通过纹影/阴影观察激励器出口射流状态可估算射流持续时间,通过识别不同时刻射流头部与激波位置,可估算出射流速度与激波速度,从而衡量PSJ的激励强度。但是需要说明的是,纹影/阴影所计算的仅仅是射流锋面的推移速度,PIV测量与数值仿真证明该速度要小于射流的真实速度,宗豪华等研究认为射流锋面速度约等于射流出口峰值速度的一半。
JHU-APL早在2003年就开展了纹影测试,可以明显看到PSJ的喷出,但是图像还不太清晰。王林等采用激光阴影进行了观测,结果显示射流流场包含一道或几道“前驱激波”和之后的射流。为了对PSJ出口附近微小空间局部流场进行精细观测,美国佛罗里达州立大学发展了先进的激光微纹影系统(Laser-Based Micro-schlieren System, LBMS),LBMS采用激光诱导的氩气放电作为纹影光源,氩气放电的发光强度比空气放电强3~4倍,并且可以减小激光束方向光强的抖动。激光器采用脉宽很窄(约3~5 ns)的PIV激光,可以维持氩气等离子体存在时间(即光源存在时间、曝光时间)约10 ns,该方法可以提供极短时间内的瞬态高强度光源,大大缩短曝光时间,而曝光时间越短越能捕获PSJ瞬时流场。通过LBMS拍摄并经过MATLAB程序去除背景干扰后的PSJ流场如图27所示,可以清晰的观测到PSJ蘑菇状湍流射流及半球形前驱激波。史志伟等采用锁相纹影对纳秒脉冲PSJ激励器的腔体内部流场进行了观测,该方法可以观测到内部快速放电产生的冲击波、反射激波、一系列衍射激波、电弧核心状态与外部流场之间的对应(图28),结果显示由于快速放电产生的冲击波在腔体内很快不断反射,并与电弧热源相互作用,可以使得腔体内的气压快速升高,冲击波经过射流出口发生衍射,产生激励器外部的前驱激波。实验还观测到了PSJ激励器产生的前两级涡环的独特现象,即典型的两轴向涡环的蛙跳现象(Leapfrogging Phenomenon):二级涡环尺寸略小,但速度较快,在刚出现时位于初级涡环下面,但随后超越初级涡环。
为了获得PSJ流场更多信息,研究人员除了改进纹影/阴影观测方法外,还对结果的后处理进行了创新。Narayanaswamy等开发了一套激波追踪程序用于从大量纹影图像中捕捉分离激波的运动。程序通过在距离壁面不同高度处沿流向的相对像素灰度变化来识别激波的位置。激波位置定义为在分离激波运动窗口范围内在一排像素中具有最低灰度的那一个像素点。在距离壁面约0.5(边界层厚度)以上的范围,程序可以明确的识别分离激波的位置,激波瞬时位置定义为距离壁面0.5~0.7范围内激波片段的平均位置。这种方法可以定性的分析分离激波的运动特性,但是无法对分离激波脚的位置进行定量的推断。宗豪华等提出了一种用于计算轴对称流场密度场分布的定量纹影方法,并将其用于深入分析PSJ的流场结构,通过这种方法可以计算前驱激波后的最大密度增量、单次脉冲喷射质量及冲量,进而评估前驱激波和射流的强度。这种方法将时均射流纹影图像与基态纹影图像进行对比,获得时均图像灰度差,进而通过图像灰度差、光线偏折角、流场折射率和流场密度之间的函数运算,求解亚伯变换(Abel Inversion)问题得到密度场分 布。该方法避免了背景纹影(Background Oriented Schlieren,BOS)密度场定量测量技术存在的位移分析导致分辨率降低、所获得位置矢量数量远低于图像像素数量的问题,能够获得具有更高的空间分辨率的PSJ密度场,典型测量结果如图29所示,所采用PSJ激励器的射流前缘最大速度约270 m/s,计算可得前驱激波后的最大密度增量约0.12 kg·m(实验环境密度约1.15 kg·m),最大质量流率约0.35 g/s,单脉冲喷射出的质量约26%,冲量约5 μN·s。

图27 美国佛罗里达州立大学纹影图[70]Fig.27 PSJ schlieren images of Florida State University[70]
图28 激励器内部流场纹影[140]Fig.28 Schlieren images of flowfield inside PSJ actuator[140]
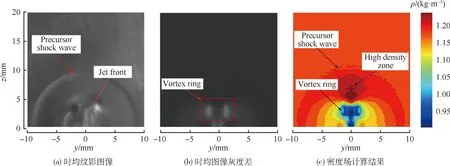
图29 放电后43 μs PSJ时均纹影图像、时均图像灰度差和密度场计算结果[121]Fig.29 Averaged schlieren image, averaged grayscale difference image and calculated density contour of PSJ 43 μs after discharge[121]
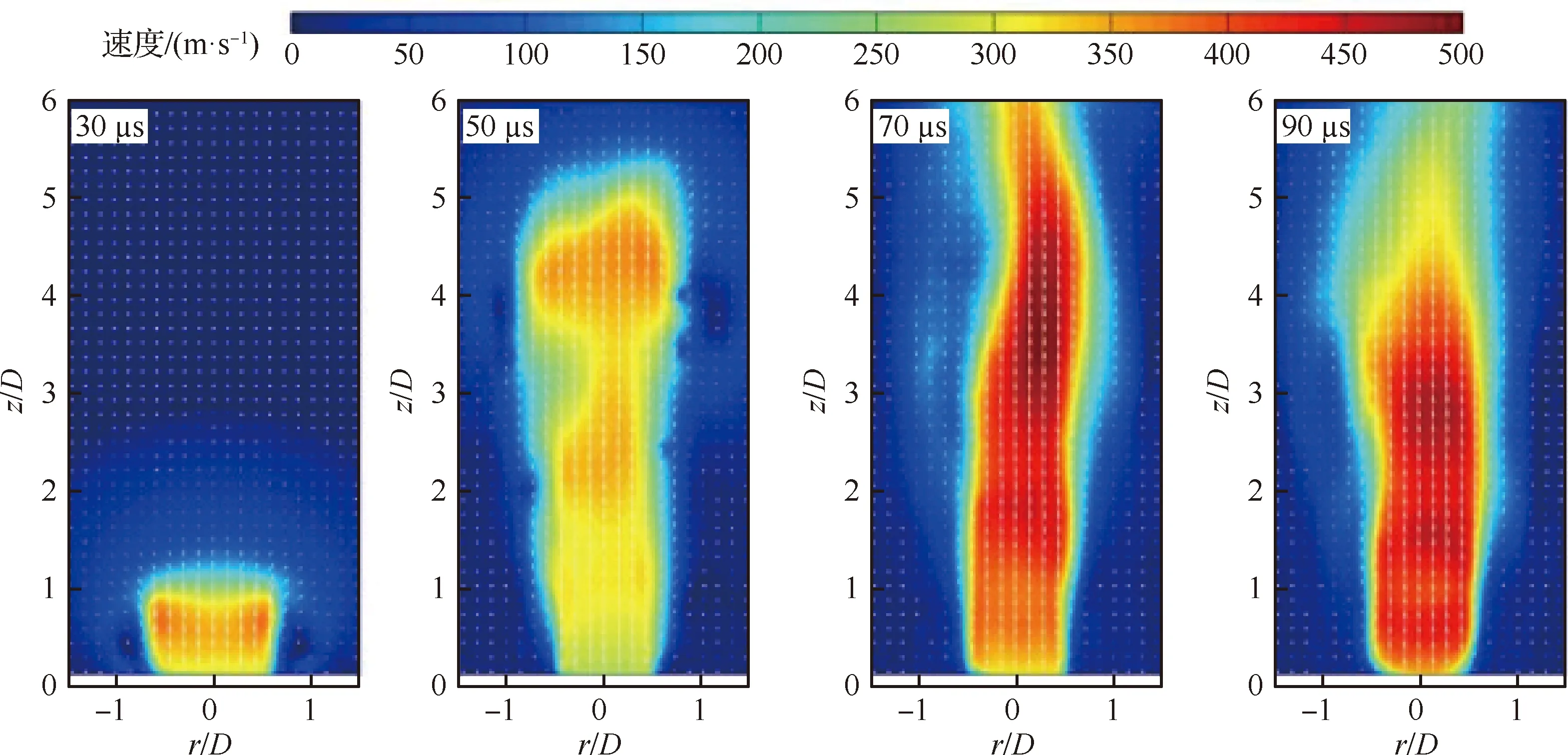
图30 美国伊利诺伊大学香槟分校PIV实验结果(放电后30、50、70、90 μs时刻)[71-72]Fig.30 PIV results of PSJ by University of Illinois at Urbana-Champaign (30, 50, 70 and 90 μs after discharge)[71-72]
2.3.2 PIV测量
纹影/阴影测量仅能够获得PSJ锋面的推移速度,PIV测量则可以获得PSJ空间流场的速度分布。2005年,JHU-APL首先尝试了PSJ的PIV测量,最初采用的是二氧化硅粒子(粒径850 nm),结果显示粒子无法以足够浓度在测试仓内悬浮,后来改用粒径较大的烟颗粒(粒径1~3 μm),但发现大粒径烟颗粒在高速射流的核心区域分布很少,导致射流核心区的速度无法准确测量,且大粒径粒子对高速射流的跟随性较差,会导致速度测量误差。2012年,美国伊利诺伊大学香槟分校研究团队采用先进的纳米粒子发生器(粒径200~300 nm,Stocks数0.06~0.14)进行了PIV测量,获得了较好的实验结果(图30,其中表示出口直径),结果显示PSJ核心区的最高速度接近500 m/s,但实验中发现由于放电过程产生较强的电磁干扰,在放电电容较大的情况下容易导致PIV同步控制系统误触发造成无法测量。为了解决射流区域示踪粒子浓度较低导致速度场计算困难的问题,代尔夫特理工大学研究团队改进了粒子播撒方式,在试验仓和PSJ激励器腔体内同时播撒粒子(图31),粒子为绝缘矿物油粒子(平均粒径1 μm),激励器腔体粒子播撒通过快响应阀门控制,阀门在放电前1.2 s(0.6工作周期)和放电时闭合,以减小对射流的影响;此外为了获得PSJ在空间中的速度分布,开展了立体PIV的测量,获得了多个流向/展向截面的的速度场,进而对PSJ三维流场进行了重构。ONERA对PIV测量的误差进行了详细分析,将测量误差归结于4个方面,即高速气流中粒子的跟随性带来的误差、相平均过程误差、激励器嵌入壁面垂直位置估测误差、片层激光平面位置估测误差;借助耦合拉格朗日离散相求解器数值模拟深入分析了第1个误差的影响,结果显示即使是Stokes数很低的粒子,在高涡量区域,粒子浓度也会比其他地方低很多,随着Stokes数增大,粒子浓度分数进一步下降。粒子浓度的差异导致PIV出现较大的计算误差,在涡环核心附近,速度误差十分显著,达到25%~30%。ONERA分析认为,对于PSJ这种瞬态高速旋涡流,今后在PIV实验时不能够仅考虑一个标准全局Stokes数,否则将无法确保较低的测量误差。
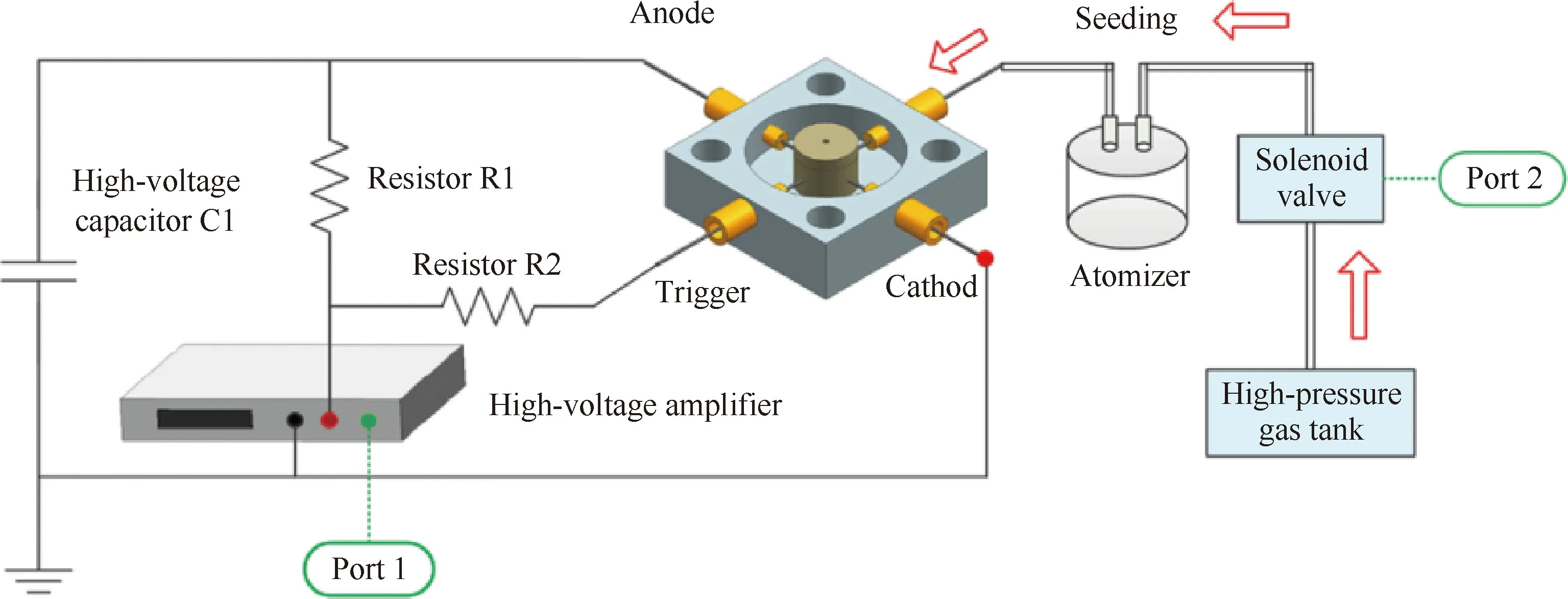
图31 放电腔体PIV粒子播撒实验装置[79]Fig.31 PIV seeding system for PSJ actuator chamber[79]
2.3.3 压力测量
PSJ实验研究中采用的压力测量主要包括出口附近射流总压测量、放电腔体非定常压力测量以及受控流场的脉动压力测量。
ONERA开展了出口附近射流总压测量,由于射流时间很短且参数变化快,需要采用频率响应较高的传感器进行测量,实验中采用了美国Kulite半导体有限公司生产的XCQ-062小型高频压力传感器,将传感器正对激励器出口放置,如图32所示。测量结果显示,相对于放电时间,射流的持续时间要长的多,大约持续1~2 ms,因此在数值模拟时可以将放电能量沉积过程近似为定容过程。基于测量所得射流总压,利用2.1节理论分析式(1)即可粗略估算不同工况下的射流速度大小。
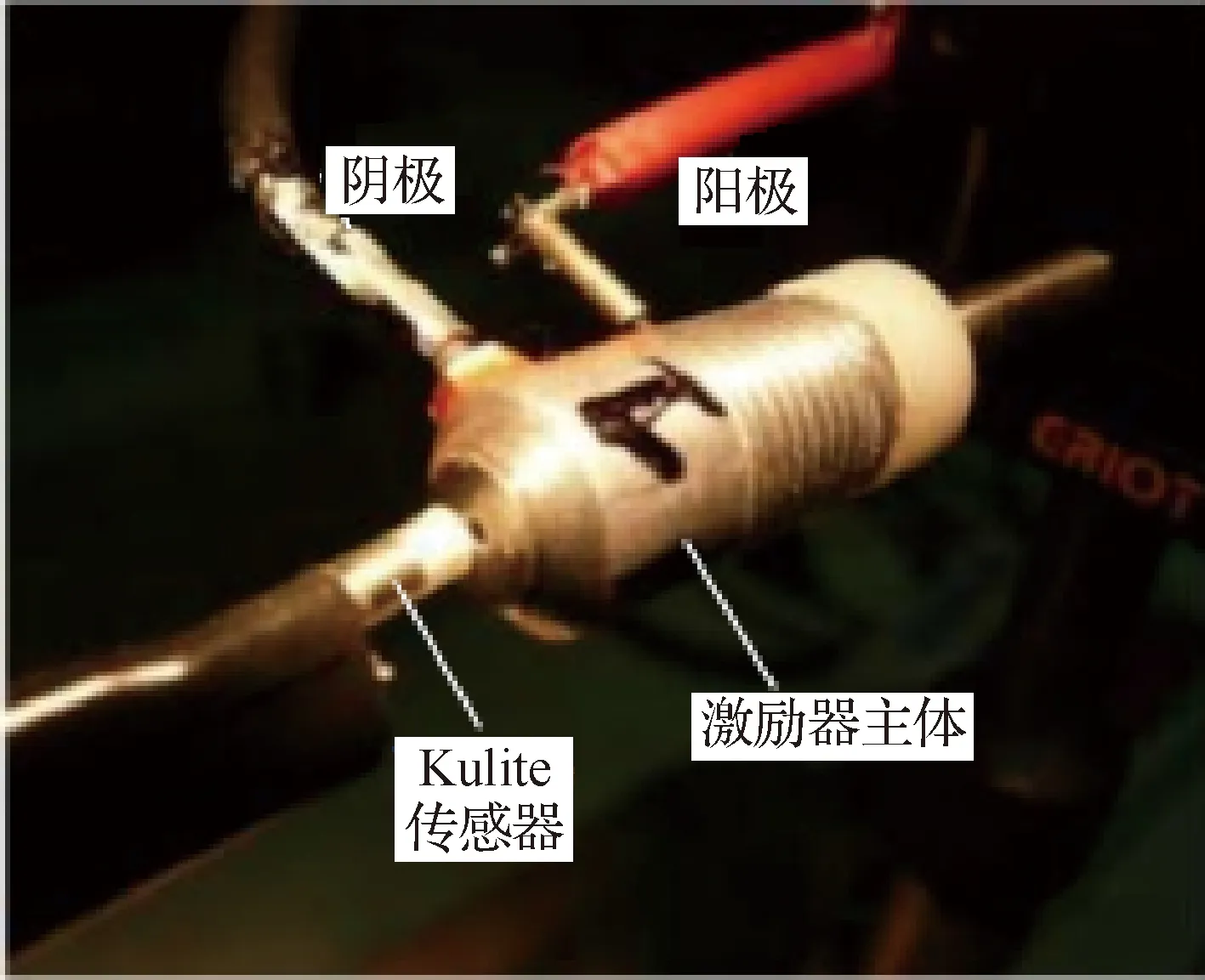
图32 PSJ激励器出口附近射流总压测量[23]Fig.32 Total pressure measurement around PSJ actuator exit[23]
JHU-APL和国防科技大学开展了PSJ激励器放电腔体非定常压力测量。由于Kulite传感器不便于进行绝缘处理,在靠近电弧的地方有可能会损坏,并且耐温性相对较差,不太适合测量放电腔体的压力,因此采用了美国PCB公司生产的尺寸略大一些的压电式高频动态压力传感器。PCB传感器响应时间小于2 μs,可承受的热冲击温度高达1 649 ℃,且抗电磁干扰能力强,其安装方法如图33所示,传感器通过一个固定螺栓进行安装紧固,由于固定螺栓所需要的咬合力矩(~1.69 N·m)超过了激励器腔体材料(六方氮化硼或树脂)的强度,因此未在激励器腔体材料上加工内螺纹,而是在激励器腔体下面连接了一个不锈钢的传感器座,通过传感器座上的内螺纹与传感器固定螺栓外螺纹配合。传感器与安装座之间放置紫铜材料的环形密封圈进行密封,安装座与激励器腔体之间采用硅橡胶进行密封。为了避免激励器的正极与接地的传感器测压头之间发生放电,或者激励器正负极的放电火花对传感器测压头造成损害(如热冲击),传感器测压头与激励器腔体之间放置了一个陶瓷绝缘垫片,绝缘垫片的底面与传感器测压头通过硅胶粘接。JHU-APL评估了绝缘垫片对测量结果的影响,结果显示绝缘垫片的加入造成的测量误差在3.4%以内。
图33 PSJ激励器腔体压力测量[108]Fig.33 Pressure measurement of PSJ actuator chamber[108]
UTA开展了超声速压缩拐角激波/边界层干扰区域受控流场的脉动压力测量,在压缩拐角壁面压力的测量中,Kulite传感器尺寸较小因而更容易放置。UTA研究中发现,直接采用Kulite传感器进行测量时会存在十分强烈的电磁干扰,分析认为这是由于等离子体合成射流在向下游运动到传感器位置时,射流中仍然存在带电粒子,带电粒子与与传感器有一定的接触从而影响了传感器的正常工作,对于时间分辨率较高的脉动压力传感器,这种作用甚至可能直接使得传感器损毁。为此,UTA专门针对PSJ激励器开发了一种抗电磁干扰的脉动压力测量方法,即“脉冲接地”方法,如图34所示,通过使用一个脉冲接地电极,在带电粒子到达压力传感器之前,将它们从射流中导出。实验中的压力传感器位于分离点平均位置附近,脉冲接地电极位于传感器上游4.5 mm处,PSJ出口位于传感器上游27 mm处。UTA分析了射流从形成到完全经过脉冲接地电极的时间,确定脉冲接地电极的导通时间为放电开始30~130 μs。从图34中脉冲接地电极处的“辉光”可以看出,该电极的确可以导出射流中的带电粒子。实验结果显示,在脉冲接地电极的作用下,电磁干扰得到了很好地抑制,传感器不再被损坏,但测量结果依然存在一定的电磁干扰,需最终通过数据后处理得到较为理想的结果。
图34 抗电磁干扰脉冲接地测压方法[48]Fig.34 Pressure measurement using pulsed-ground electrode to reduce electromagnetic interference[48]
2.3.4 放电光谱测量
光谱分析是获得等离子体电子密度、电子及重粒子温度等信息的常用方法。ONERA采用光谱仪与ICCD相机对PSJ激励器放电光谱进行了测量,获得了N、Cu、Fe等原子谱线,通过多谱线斜率法(Boltzmann图线法)获得了原子的激发温度,在局部热力学平衡状态下该温度近似等于电子温度,结果显示PSJ激励器电子温度可达15 000 K,电子密度约10m。ICCD相机获得的放电等离子体图像如图9(a)所示,放电电弧呈圆柱形,通过分析发光强度判断电弧的直径约为1 mm。贾敏等基于光谱诊断技术研究了纳秒脉冲PSJ的温度特性,结果显示射流宏观温度约为800 K。UTA通过光谱分析获得了N的振转光谱,分析得到PSJ激励器放电时分子的转动温度约800 K,振动温度约3 100 K,不确定度约10%~15%,其中转动温度基本等于气体分子的平动温度,也即通常所说的宏观热力学温度,转动温度的分析方法是假设若干转动温度值后基于偶极辐射的跃迁几率和光谱仪响应函数求得对应不同转动温度的谱带形状,通过与实验测量的N谱带对比确定最接近的转动温度值,振动温度的分析方法是假设若干振动温度值后观察光谱带头或带边(即光谱谱带中强度突变的锐边一侧)的变化,通过与实验测量的N谱带对比确定最接近的振动温度值。
2.3.5 冲量测量
为了评估PSJ用于飞行器姿态控制的可行性,JHU-APL在2006年首先开展了激励器的冲量测量,为此专门研制了基于迈克尔逊干涉仪的微推力测试平台,平台尺寸为30 mm×30 mm,采用4个硬悬臂梁悬挂,通过迈克尔逊干涉仪测量位移响应,通过定制的微小摇动台进行校准,在测试平台上加载已知质量,测定共振频率的改变,得到系统的有效刚度常数和无载时的原质量,利用该平台测得PSJ激励器在注入能量为30~90 mJ时的冲量为1~3 μN·s。
张宇等采用自主研制的单丝扭摆微冲量测量系统开展了激励器的冲量测量,该系统由扭摆架、夹具、扭丝、扭摆杆、配重螺杆、激光器、平面镜、标尺和高速相机等组成,如图35所示。激励器外壁面粘接于扭摆杆圆弧凹面,扭摆杆中部盖板用于固定扭摆杆与扭丝的位置,扭丝两端由夹具固定连接于扭摆架。扭丝材料选用直径为0.2 mm的高强度、高弹性65 Mn弹簧钢,组装过程中可以通过拉伸扭丝来改变扭丝的扭转弹性系数,从而控制单丝扭摆的抗干扰性及其测量精度,扭丝拉伸越大,其扭转弹性系数越大,单丝扭摆系统受其他振动的影响越小,系统抗干扰性越强,但测量精度越低,故系统测量精度与抗干扰性存在矛盾,需依据具体实验要求对其进行调节。配重螺杆用于调节扭摆平衡,可依据激励器的质量旋进或旋出。平面镜贴于扭摆杆正中部,激光器出光孔、平面镜、标尺在同一平面上,保证激光器发射光线与平面镜反射光线在同一平面内。PSJ激励器工作时产生喷流反作用力直接作用于扭摆杆一端,致使扭摆杆绕扭丝发生偏转,同时贴于扭摆
图35 单丝扭摆微冲量测量系统示意图[110]Fig.35 Schematic of single line torsion pendulum[110]
杆中部的平面镜随之偏转,激光器发射光线经平面镜反射后在标尺上的光斑产生位移,该位移变化由高速相机记录。扭丝最大扭转角度与扭摆杆所受冲量大小成正比,因此光斑最大位移与PSJ冲量具有如下关系:
(17)
式中:为平面镜光线反射点与标尺的距离;为通过力锤施加标准冲量时产生的光斑最大位移;实验显示两电极PSJ激励器冲量>70 μN·s,三电极激励器冲量接近500 μN·s。
2.3.6 其他测量手段
PSJ激励器研究中使用的其他测量手段还包括用于放电电压/电流、电路参数的测量,用于高超声速流场显示的平面激光散射(Planar Laser Scattering,PLS),以及用于激励器壁面和射流温度测量的红外热像仪、数字散斑成像(Digital Speckle Tomography,DST)技术等。激励器的放电电压/电流通常采用高压探头和电流互感线圈测量,并通过示波器进行信号采集,由于放电的时间尺度为微秒量级,测量时必须采用100 MHz量级以上的采样频率才能捕捉完整的单周期电压和电流波形。网络分析仪和LCR测试仪是常用的电路参数测量方式,ONERA采用网络分析仪测量了放电电路的阻抗、电感等参数,为等效电路模拟提供了辅助,笔者团队采用LCR测试仪获得了放电电路的电容、电阻等参数用于计算激励器的能量转换效率。为了获得PSJ在高超声速气流中的精细流场结构,笔者团队在风洞试验中采用了PLS流场显示技术,在风洞稳定段前添加CO作为示踪粒子,CO在喷管扩张段静温大幅下降成为固体粒子组成的CO微粒雾,CO微粒雾会在流场温升环境(如激波波后和边界层内)中发生蒸发,通过照射激光并拍摄微粒雾上散射的激光可以获得高精度、高对比度的流场结构显示。Haack和Ko等采用DST技术研究了射流温度特性,结果显示放电结束后75 μs、激励器出口下游1.85 mm处的射流温度高达1 600 K。ONERA采用红外热像仪测量了激励器腔体温度,分析了腔体壁面的传热特性,为选择合适腔体材料提供了指导。
3 能量效率特性
作为一种主动流动控制激励器,PSJ激励器需要引入额外辅助能量对流场施加扰动,在达到控制效果的前提下如何尽可能减小能量消耗是激励器需要解决的关键问题;并且PSJ激励器的应用对象主要为各类飞行器,由于载荷和空间的限制,飞行器所能携带的能源十分有限,因此激励器的能量效率问题更加突出。
为便于分析,根据PSJ激励器的能量传递过程,可以将其总能量效率分解为3个部分,即放电效率,加热效率和喷射效率,如图36所示。激励器开启后,高压电源为放电电容充电,直至电容两端电压达到激励器正负电极之间气体间隙的击穿电压,此时放电电容中所储存的能量达到最大值,这一部分能量称之为电容能量,是单次放电过程中激励器消耗的总能量,其计算公式为
(18)
式中:为放电电容;为击穿电压。空气击穿之后,激励器腔体内正负电极之间产生放电电弧,电弧所具有的能量称之为电弧能量,其计算公式为

(19)
其中:为放电持续时间;表示电弧两端电压;表示经过电弧的电流。电容能量到电弧能量之间的转化效率称之为放电效率。放电电弧的出现使得激励器腔体内产生大量由电子及正负离子组成的等离子体,正负带电粒子在电场的作用下被加速并发生相互碰撞,将一部分电能迅速转化为气体的内能,在宏观上表现为气体温度升高(焦耳加热效应)、压力增大,这一部分对于实现气体膨胀和射流产生有用的能量称之为气体内能增量,其计算公式为
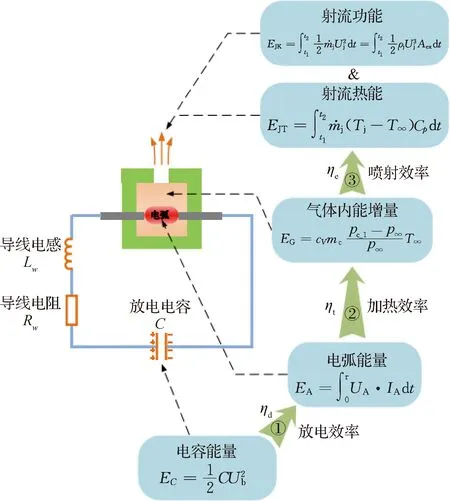
图36 PSJ激励器能量传递过程及能量效率定义[108]Fig.36 Energy transfer process and energy efficiency definition of PSJ actuator[108]

(20)
电弧能量到气体内能增量的转化效率称之为加热效率。腔体内气体受热膨胀后从出口喷出,产生高温高速射流,射流所携带的热能及射流的动能之和称之为射流能量,其计算公式为
=+
(21)

(22)

(23)
式中:表示喷流开始时间;表示喷流结束时间。由气体内能增量到射流能量的转化效率称之为喷射效率。需要注意的是,尽管等离子体合成射流激励器的工作特征与热机类似,而热机的效率计算应该仅考虑机械能部分,如航空发动机的效率指的是尾流的机械能与燃烧所释放热能的比值。但是,由于等离子体合成射流的热能在主动流动控制中发挥了不可忽视的作用,如引起局部温升进而导致流动阻塞、声速线上移等,本文在计算射流效率时将射流热能的贡献考虑在内。
为了获得PSJ激励器能量效率变化规律、实现激励器能量效率优化提升,多个研究团队开展了激励器能量效率特性的研究。JHU-APL最早开展了PSJ激励器能量效率的研究,通过测量激励器腔体压力估算的放电效率与加热效率之积约为10%~35%。UTA详细分析了输入电能转化为气体热能的途径,如图37所示:气体放电过程中电弧沉积的电能大部分用于电子焦耳加热,使得电子温度升高至,电子与中性粒子碰撞可以使其温度升高至振动激发温度;另有一部分用于重离子焦耳加热,使得离子温度达到;由于等离子体的非平衡性,电子温度远大于宏观气体温度,而重离子温度则约等于气体实际温度;重离子进而通过与中心粒子碰撞传递能量,高温电子通过弹性或非弹性碰撞(振动激发等)传递能量。UTA分析指出,由于振动-平动弛豫时间较长,因此分子振动能无法转化为PSJ激励器可以有效利用的气体内能,在风洞试验较低静压(约4.7 kPa)情况下,分子振动能占比较高,电弧能量中仅有约10%用于激励器腔体气体的加热,此时理论计算得到仅有约0.06%的总能量转化为气体动能。宗豪华等对于一种新型序列放电(触发放电+脉冲直流放电)电源驱动的PSJ激励器的能量效率进行了全面分析。研究结果表明该种放电形式激励器的总能量效率小于0.1%;其中放电效率与电弧两端电压呈正比;加热效率(约为10%~60%)与放电电流、放电时间、腔体长度呈反比;喷射效率(文中定义为理想热力循环效率)是制约总能量效率的主要一点,一般低于30%。需要说明的是该研究中总能量效率的计算未将射流热能考虑在内,因此其计算结果偏低。文中指出能量效率较低是PSJ激励器面临的瓶颈问题之一,在放电特性上提高能量沉积速率、在激励器结构上加大电极间距和减小腔体体积是未来优化激励器能量效率的主要思路。
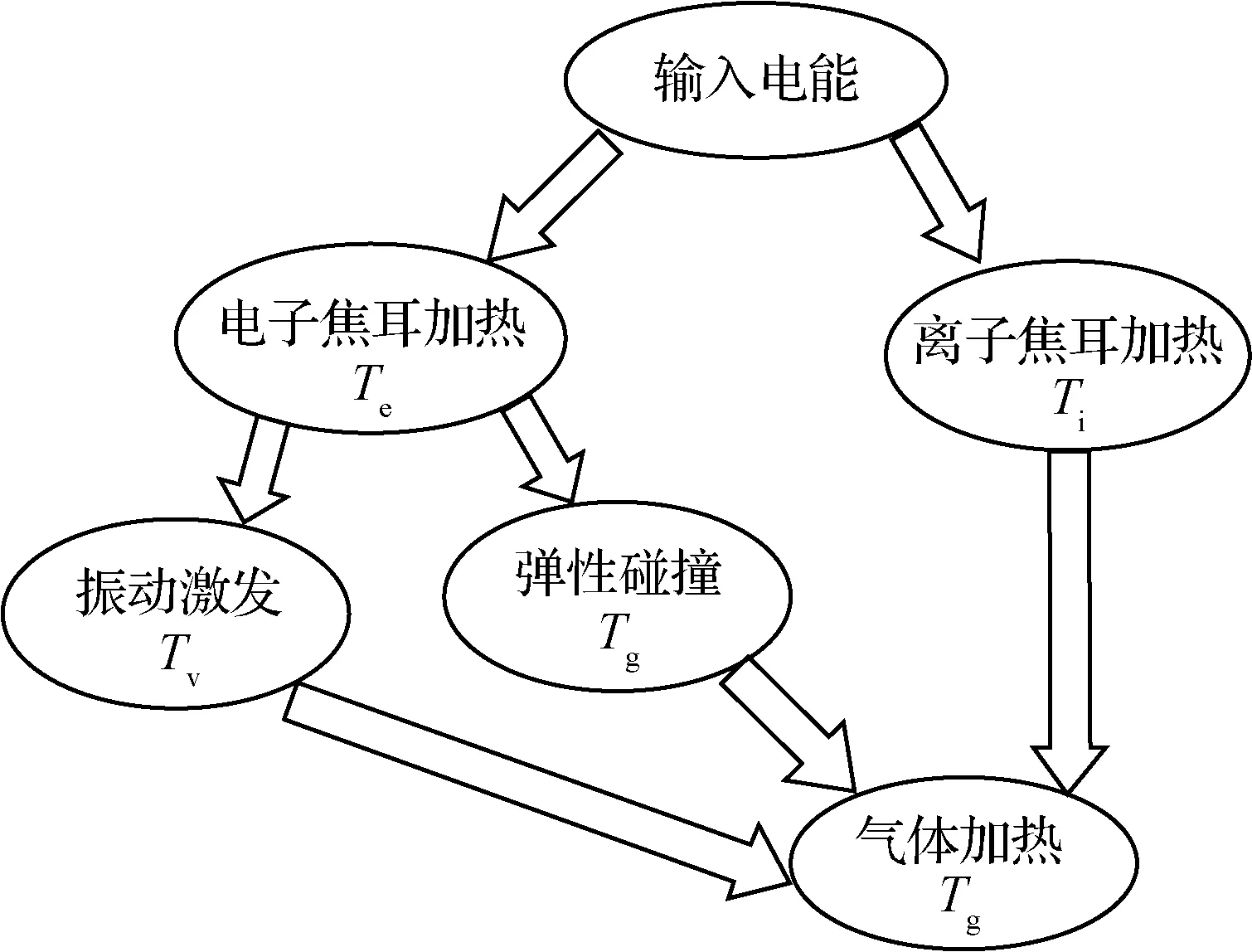
图37 输入电能到气体内能转化过程[25]Fig.37 Transfer process from electric energy to gas internal energy[25]
ONERA通过仿真研究了加热效率与气体喷射效率,通过引入虚拟电阻模拟等离子体鞘层,研究了鞘层能量损失(Sheath Energy Loss)对效率的重要影响,仿真结果显示鞘层能量损失约占电容储存能量的60%,而辐射损失只有2%;数值仿真计算的气体喷射效率约40%,气体内能增量39%转化为射流热能,只有约1%转化为射流动能,60%仍然保留在激励器腔内。基于耦合磁流体力学控制方程和RLC(Resistor-Inductor-Capacitor)电路方程的计算方法,张志波等对容性放电PSJ激励器的能量效率进行了分析,特别是对等离子体鞘层、放电电弧区域的电压降随时间的变化过程,以及加热过程中等离子体鞘层能量损失的重要性开展了深入研究,其研究结果进一步印证了ONERA的结论,即在电弧能量到气体内能增量的转化过程中,等离子体鞘层能量损失是能量损耗的主要组成部分。对于毫秒尺度的容性放电,等离子体鞘层能量损失占据了电弧能量的40%~60%,而辐射能量损失仅占据了不到5%,为了降低鞘层能量损失需要压缩放电时间、提高能量沉积速率,这也与文献[123]中的结论相一致。
Shin分析了腔体体积对加热效率的影响,指出由于放电直接加热体积有限,当腔体体积较大时加热形成腔内激波,激波会不断反射造成加热效率降低。通过对比数值仿真与纹影实验得到的射流速度,王林等得到放电效率与加热效率之积约为5%,激励器总输入能量(即电容能量)到射流动能的转化效率约为1.6%。Golbabaei-Asl等设计单摆装置进行了激励器能量效率计算,通过比较实验测试与理论计算的单摆角度计算了激励器的电能向腔内气体内能的转化效率,结果表明转化效率低于10%,而且效率随着激励器电容的增大而降低。
借鉴多个单位的研究成果,周岩等结合理论分析与多种实验测量手段对PSJ激励器的能量效率开展了系统研究,得到了PSJ激励器的完整能量传递过程,结果显示典型工况下PSJ激励器的总能量利用效率约为11.3%,其中放电、加热及喷射各过程的转化效率分别为40%、64%和44.2%。在PSJ的能量构成中,射流热能占据主体,占比>90%,射流动能对总能量效率的贡献仅为1.04%。对激励器能量损失的分析显示,由于放电过程处于能量传递路径的上游,因此放电过程中由附加电阻带来的损失较为显著,占总输入能量的60%。加热过程中能量损失的主要来源为电极和腔体壁面的对流换热损失,以及分子振动激发带来的损失,在放电参数一定的条件下,增大腔体体积可以一定程度上提高加热效率。喷射过程中能量损失的主要来源为对流换热损失及腔体内剩余未喷出气体带来的损失,随着出口直径的增大,主射流喷射时间缩短,对流换热损失减少,且腔体内剩余气体较少,因此喷射效率递增,随着输入气体内能增量的加大,尽管主射流喷射时间及对流换热损失略有增加,但喷射出的气体质量大幅提高,因此喷射效率同样随之提高。此外正负电极间距(影响击穿电压)和放电电容容量是决定放电能量大小的两个主要参数,对于激励器电极间距与电容容量参数匹配优化研究显示,在放电能量一定的条件下,相比“小电极间距+大电容容量”的方式,“大电极间距+小电容容量”的参数匹配对于提高放电效率和加热效率均有帮助。
4 静态流场工作特性
在无来流的静态流场中获得PSJ激励器工作特性的变化规律,进而对激励器的工作参数进行优化设计,是开展激励器流动控制应用前的必要工作。大体而言,影响PSJ激励器静态流场工作特性的影响因素可以归为结构参数、放电参数和环境参数3类,其中包含的具体影响因素如表1所示,本节将对这些因素的影响规律研究进行归纳与总结。
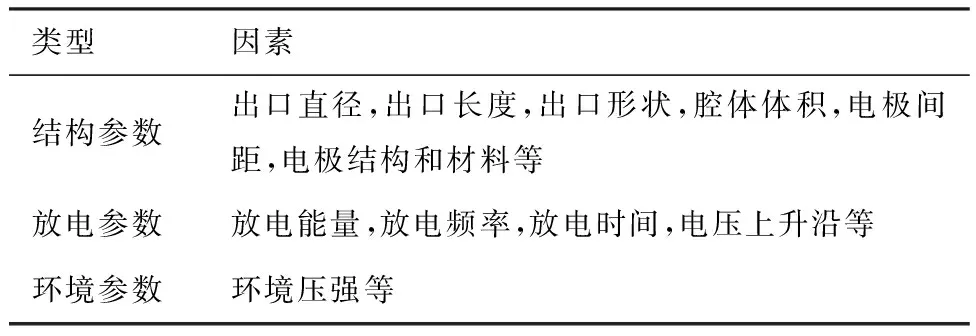
表1 PSJ激励器静态流场工作特性影响因素
4.1 结构参数影响规律
PSJ激励器结构主要由射流出口、腔体、电极3个部件组成,这些部件参数的改变会对激励器性能产生不同程度影响。
在激励器的结构参数中,出口直径是其中影响最显著的因素之一。早在2005年,JHU-APL就开展了射流出口直径影响的数值仿真,结果显示射流出口直径范围在0.13~0.66 mm时,射流最大速度随出口直径增加而增大,分析认为原因是射流出口过小,黏性力影响较大,所以当射流出口直径增加时最大速度增大。宗豪华等对单个激励器不同射流出口直径的影响进行了实验研究,得到了类似的结果,即随着射流出口直径的增大,射流锋面移动速度提高。笔者团队对串联激励器阵列不同射流出口直径的影响进行了实验研究,结果显示这一关系仅在射流出口直径较小时成立,当出口直径超过临界值后,射流锋面移动速度会出现下降。这是由于当射流出口直径较小时,出口喉道边界层的“阻塞作用”占据主导,导致射流质量流率较小,增大出口直径后,射流质量流率大幅增加,射流速度相应提高。然而当射流出口直径增大超过临界值后,射流质量流率达到饱和,进一步增加出口直径使得出口截面积增加,在射流质量流率基本不变的情况下,射流速度会因而减小。因此,为了获得最大的射流速度,射流出口直径存在一个最优值,最优值主要由输入能量大小和放电腔体体积决定。王林分析了射流出口直径对“前驱激波”的影响,研究表明喷射前期阶段“前驱激波”的速度特性几乎不受激励器出口直径的影响,但大的出口直径可以产生衰减较慢的“前驱激波”和衰减较快的射流,“前驱激波”会在放电开始后50 μs左右衰减为以当地声速传播的压缩波。放电开始50 μs内,不同激励器出口直径的“前驱激波”具有相同的运动距离;而放电开始50 μs之后,大的射流出口直径使得“前驱激波”具有更大的运动距离,可知大的激励器出口直径产生的“前驱激波”耗散更慢、平均运动速度更快。宗豪华等基于非定常零唯解析模型认为PSJ激励器的理论极限工作频率随孔口直径线性增加,随着出口直径的增加,高质量流率导致喷流持续时间缩短。此外,射流出口形状、长度等也会对激励器产生影响。ONERA数值模拟结果表明收缩-扩张的喷口对于高超声速流动控制具有更佳的控制效果。宗豪华等理论计算表明出口长度的变化不影响单次喷射模式下的峰值射流速度和射流持续时间,然而更长的出口长度导致激励器腔体的亥姆霍兹频率降低,使得激励器高频工作时的射流强度快速恶化。
腔体体积大小是影响激励器性能的另一个显著因素。2003年JHU-APL开展了腔体体积影响的数值仿真,模拟腔体体积范围28~52 mm,结果显示随着腔体体积增大,射流持续时间先增加后减小,射流速度及冲量均减小。宗豪华与Kotsonis研究表明,激励器腔体体积越大,射流速度越慢。在相同容积下,腔体直径与高度的比值(径高比)对激励器性能也会发挥作用,王林等数值仿真结果显示随着径高比的减小,射流最大速度增加,饱合频率降低。更多的研究显示,腔体体积的影响与放电能量存在一个耦合作用,放电能量与腔内气体内能(取决于腔体体积与气体密度)之比所定义的无量纲参数是决定激励器性能更本质的因素,当较大时,在一定范围内随着腔体体积增加,射流最大速度都只能达到当地声速,射流持续时间延长,当较小时,随着腔体体积增加,射流速度降低,因此腔体体积必须与放电能量匹配,否则射流强度会降低,3.2节中将对无量纲参数的影响进一步深入分析。此外,ONERA和法国图卢兹大学还研究了腔体材料对激励器性能的影响,指出当激励器工作频率高于750 Hz后,不同材料的差异将开始显现,热传导系数高的材料有利于激励器散热,能够改善激励器的重频性能。
PSJ激励器能量输入位置与区域大小由放电电极直接决定。多个机构开展的研究表明,随着电极间距的增加,电弧加热区域扩大,PSJ激励器整体效率提高,导致更高的峰值喷射速度和更长的喷射持续时间。文献[115]将电弧加热体积与腔体体积之比定义为无量纲加热体积,无量纲加热体积量化了电弧加热的均匀性。当无量纲加热体积保持不变时,不同腔体体积的激励器会具有相似的喷流轨迹;随着无量纲加热体积的增加,电弧加热均匀性提高,激励器效率增加。ONERA研究了激励器电极位置的影响,发现当电极靠近激励器出口时形成的射流速度更大。JHU-APL还对不同电极尖端构型(尖点、半球形、圆柱形、球形、截断圆锥)、不同电极材料(纯钨、多种钨合金)进行了电极寿命试验,试验结果表明,电极尖端构型对激励器寿命影响显著,半球形电极虽然减弱尖端效应,增加了击穿电压,但不容易烧蚀,稳定性最好,使用寿命较长,而电极材料对激励器寿命的影响不大。同时对不同激励器电极长径比的试验结果表明,增大电极长径比能够提高激励器点火的最大截止频率。
4.2 放电参数影响规律
影响PSJ激励器性能的主要放电参数是放电能量、放电频率、放电时间和电压上升沿。早在PSJ激励器提出的时候,JHU-APL就开始了对放电能量影响的研究,理论分析、实验测量与数值仿真结果都表明随着放电能量的增加,射流速度与喷射射流质量都将增大,这是由于放电能量增大后,放电对激励器腔内气体的加热增强,气体温升与压升增大。为了更好地表征放电能量对气体温升和激励器工作特性的影响,JHU-APL提出了放电能量与腔内气体内能E之比所定义的无量纲参数,研究表明在一定范围内激励器腔内可达到的峰值压力比基本与无量纲参数呈正比。Reedy和王林等开展的纹影和PIV数据初步显示了峰值射流速度与的非线性关系:随着无量纲参数增大,峰值射流速度单调增加,但增幅逐渐放缓。宗豪华与Kotsonis通过理论计算发现,当假设喷射效率恒定且出口速度变化自相似时,峰值射流速度与的非线性关系可表示为∝()13,这意味着峰值射流速度加倍将需要能量沉积增加八倍;进一步的结果表明排出的气体质量、射流冲量和射流机械能将随着无量纲参数单调增加。宗豪华等进一步研究了无量纲参数对射流形态的影响,实验的在0.044~22.1之间,纹影实验发现在不同的条件下存在3种流场发展形态:① 在较小时(小于0.35),激励器只能产生较明显的激波结构;② 在中等水平时(0.35~1.1),激励器产生激波与弱射流结构,而在射流演化过程中,射流前缘会从射流主体中分离,形成涡对;③ 在较大时(大于1.1),激励器产生激波与强射流结构,射流前缘在整个演化过程中不会与射流主体分离。
激励器的放电频率影响腔体吸气复原、腔体壁面散热的时间,进而对激励器性能产生影响。当放电频率增大时,由于热量累积,激励器腔体内气体的平均温度增加,平均密度减小。如果激励器的放电电压不由电路进行控制,而由激励器的击穿电压控制,则平均密度的减小将会导致击穿电压降低,进而使得放电电流、放电能量降低,射流速度下降。例如ONERA研究结果发现,峰值出口速度在<1 kHz时略有变化,在>1 kHz之后显著下降。
众多研究表明,PSJ激励器存在“饱和工作频率”,超过该频率,脉冲射流的强度会显著恶化,甚至将无法正常工作。例如Narayanaswamy等设计的激励器实验结果显示,当放电频率在10 kHz以上时,激励器出现严重的“哑火”现象,宗豪华在测量PSJ平均射流总压(相当于推力)时发现,超过一定频率时,总压将出现饱和,不再随激励器工作频率增加。这是由气体喷射与吸气交替的衰减振荡过程决定的。在激励器气体喷射阶段,腔体压力下降,喷射速度降低,然而由于气体的惯性,喷射阶段不会在腔体压力等于外界压力的时刻终止,腔体内将会出现负压,随后由于负压的存在激励器将进入吸气复原阶段。喷射阶段和吸气复原阶段将交替进行,直到所有的扰动能量被黏性力耗散掉。从理论上讲,激励器正常工作至少需要在喷射阶段和吸气复原阶段之间交替一次,按照一次喷射和一次吸气复原计算的激励器工作频率就是其理论极限工作频率,也被定义为激励器的“饱和工作频率”。王林等在PSJ激励器数值模拟研究中首次提出了“饱和工作频率”的概念。宗豪华与Kotsonis进一步研究发现,激励器腔体类似于一个赫姆霍兹共振腔,激励器的“饱和工作频率”接近此腔体的赫姆霍兹固有频率,其计算式为

(24)
式中:和表示环境密度和环境压强;表示腔体体积;表示喉部长度;表示出口截面积。随后的PIV测试结果证明,在一个工作周期内喷射与吸气复原多次交替的过程中,PSJ出口速度的振荡频率接近腔体的赫姆霍兹共振频率。
放电的持续时间、电压的上升沿等对激励器工作特性亦有重要影响。ONERA采用2.1节所述CPS和IPS两种类型电源对放电持续时间的影响进行了实验研究,结果显示相比CPS电源(放电持续时间一般小于10 μs),IPS电源(放电持续时间在百μs量级)产生的PSJ具有较低的峰值喷射速度,但是喷射持续时间较长。宗豪华研究表明对于固定放电能量的脉冲DC放电,加热效率和喷射效率随着放电持续时间的增加而降低。朱益飞等基于2.2.3节所述等离子体动力学模拟的研究表明,放电的上升沿较短时,可以在更短的时间内产生更高的电场强度,因此缩短了电离端面的传播时间,产生了更强的电离。当电压信号幅值和脉宽相同时,更短的上升时间可以使得退激反应时间延长,放电时更多的激发态粒子和正负离子会产生和耗散,因此输入能量可以提升77%,代价是能量效率降低2.4%。由于输入能量提升,射流速度、出口处压力和温度均随上升沿缩短而提高。
4.3 环境参数影响规律
包括环境压力、温度、湿度(水蒸气含量)等在内的环境参数对激励器工作特性具有不同程度影响,特别是对于高空巡航飞行器中使用的激励器,环境应力的影响至关重要。对于文献[95]中的电源系统,环境压力决定了电极间隙的击穿电压,进而决定了放电能量,峰值射流速度随环境压力略有变化。例如王林等实验结果表明,随着气压的降低,激励器工作击穿电压及放电峰值电流减小。对于三电极激励器,在某一环境压强下,激励器工作过程中存在一个有效击穿电压范围,如果电源电压超过其最大击穿电压或小于其最小击穿电压,激励器无法安全可靠工作。从1~0.1 atm,击穿电压及峰值电流均减小约63%,放电电容及火花电弧沉积能量同步减小,但电容向火花电弧的能量传递效率基本维持不变,三电极激励器约为85%左右;随着激励器工作环境压强的降低,腔体内气体密度减小,射流流场中“前驱激波”密度梯度降低,但速度基本不变;三电极激励器产生的射流及“前驱激波”速度峰值不随工作环境气体压强的变化而发生明显的改变,但激波强度(图像灰度比所得)却在=0.6×10Pa时达到最大。对于文献[39, 69]中的电源系统,电极间隙的击穿电压由电源控制,不受环境压力的影响,此时在不同的环境压强下放电能量是固定的,因此随着环境压力/密度的降低,激励器的无量纲能量沉积增加,峰值射流速度和峰值喷嘴压力比(相当于峰值射流马赫数)呈上升趋势。李洋等也开展了环境压力(变化范围7~100 kPa)对PSJ激励器性能影响的研究,对比结果发现:在较高气压条件下,一个旋涡对将与前驱激波同时出现,旋涡对与射流的发展保持同步,射流锋面速度表现为持续下降;在较低气压条件下,射流与前驱激波仍然出现,但是没有明显的旋涡对产生,此外射流锋面速度并不是持续下降,而是存在振荡。此外,周岩对于环境温度的影响进行了初步研究,实验结果显示环境温度由500 K升至700 K左右时,激励器击穿电压下降约800 V。更多关于环境温度、湿度影响的规律还需进一步开展详细研究。
5 流动控制应用
5.1 横向主流干扰
射流与横向主流的相互作用涉及流体的卷吸、涡结构的形成、射流的穿透和动量交换等,对横向主流的有效干扰在边界层转捩控制、射流掺混增强、推力矢量等方面具有潜在的应用价值,是流动控制应用研究的起点和基础问题。
5.1.1 低速横向主流干扰特性
在PSJ与低速横向主流干扰特性方面,ONERA首先开展了初步探索,基于PIV和三维数值模拟观测到了PSJ诱导流向涡对的形成,边界层速度剖面结果显示射流激励作用下边界层的动量增加,由于来流速度较低(约20~40 m/s),因此观测到的射流穿透特性很强,影响区域到达下游10倍孔径处,不同参数研究显示放电能量对PSJ穿透深度和诱导涡轨迹的影响较小,但会影响诱导涡的涡量,放电能量较低时,涡量较小,涡耗散更快。
宗豪华与Kotsonis对垂直喷射PSJ与低速湍流边界层(20 m/s,动量厚度雷诺数3 000)的相互干扰作用机理开展了深入研究,并分析了速度比(PSJ速度与主流速度之比)、无量纲冲程(PSJ冲程与出口直径之比)对干扰特性的影响。激励器的平均速度比范围0.7~1.6,峰值速度比范围1.2~3.5,对应工况的无量纲冲程范围2.0~5.4,放电频率为200 Hz(对应斯特劳哈尔数0.02)。结果显示射流与低速主流的干扰作用涉及四种典型涡结构的产生:紧靠射流的上游处产生的马蹄涡(Horseshoe Vortices)、在射流剪切层卷起形成的环形涡(Ring-type Vortices)、在射流后缘偏斜的混合层形成的一对准定常悬挂涡(Hanging Vortices)以及在远场形成的准流向的逆向漩涡对(Ounter-Rotating Vortex Pair)。在不同的速度比和无量纲冲程下,射流涡环的动力学特性显示出两种截然不同的模式(图38所示)。

图38 PSJ与低速湍流边界层相互作用流动状态[87]Fig.38 Flow regime of the interaction between PSJ and low-speed turbulent boundary layer[87]
在平均速度比、无量纲冲程大于1.0、2.6时为A模式,发展初期,涡环后面跟随一个高速尾迹射流柱,由于涡环的上游侧和下游侧受到了不均匀的动量注入,涡环将向下游倾斜;当尾迹射流柱从涡环上切断后,受到库塔-儒科夫斯基升力的驱动,涡环转而向上游的倾斜。相比之下,在平均速度比、无量纲冲程小于1.0、2.6时为B模式,涡环从一开始就向上游倾斜,俯仰角单调增加。涡环动力学特性直接决定了射流的穿透特性,A模式的射流穿透度要普遍高于B模式;在A模式中,涡环先下游倾斜、后上游倾斜,两个过程相互抵消使得平均俯仰角接近0°时,射流具有最大的穿透度,此时射流的无量纲冲程称之为过渡无量纲冲程。PSJ的过渡无量纲冲程范围约3.7~5.4,高于一般脉冲射流。
宗豪华与Kotsonis进而对横向主流干扰中影响边界层形状因子和壁面剪切应力的近壁面流场结构开展了研究。结果显示对于A模式,在射流体的迎风侧和背风侧,分别形成了若干个剪切涡(Shear-Layer Vortices,SVs)和一个回流区。回流区内存在一个悬挂涡对(Hanging Vortex Pair,HVP),喷射过程结束后悬挂涡对演化为一个准流向的初级逆向漩涡对(Primary Rotating Vortex Pair,p-CVP)。在p-CVP的腿部两侧产生下洗速度,导致腿部两侧出现低形状因子的区域,源于回流的低动量流体被困在p-CVP和前涡环(Front Vortex Ring,FVR)之间,导致在对称平面出现高形状因子的边界层区域。对于B模式,没有p-CVP产生,然而在FVR纵向(展向)两侧边缘的附近,存在着类似的流体下洗效果,因此也存在相似的低形状因子空间分布。对于壁面剪切应力的计算显示,在射流对称平面上,PSJ流场的时均壁面剪切应力总是高于无射流基准流场,原因可能是PSJ吸气复原过程去除了部分低能量的流体;随着PSJ速度比、无量纲冲程的增大,其时均壁面剪切应力也会增大。
5.1.2 高速横向主流干扰特性
JHU-APL的Cybyk等首先开展了PSJ与超声速横向主流干扰特性的研究,数值模拟验证了PSJ可以穿透马赫数3的超声速流场边界层,引起横向主流边界层转捩,首次验证了PSJ激励器用于超声速流场主动流动控制的可行性。UTA的Narayanaswamy等利用自己设计的两电极激励器对PSJ与超声速主流的干扰特性进行了研究,通过锁相纹影技术得到的结果表明峰值电流1.2 A的PSJ激励器在马赫数3超声速主流中垂直喷射时射流穿透度达到6 mm,并在上游诱导一道激波,初步估计得到射流与主流的动量通量比约为0.6,但是由于观测手段和观测能力的限制,实验结果未能深入分析PSJ与超声速来流相互干扰的细节和详细过程,如射流诱导的流动分、射流激波的强度和演化过程,以及射流的动量变化和腔体回填过程等。Emerick等开展了图10所示伪串联点火三电极激励器与马赫数1.5超声速主流干扰作用的研究,实验验证了PSJ对超声速主流的控制能力,PSJ可以使得主流发生偏转,最大偏转时刻出现在触发放电275 μs后,主流的最大偏转角约为5°,与压比为3.2的定常微射流所产生的气流偏折角类似,但是定常射流能够产生持续的偏转,而PSJ的作用时间约为0.7~1 ms,激励器单次放电与700 Hz重频工作显示了相似的结果。韩国蔚山大学开展了PSJ与马赫数3超声速主流干扰作用的研究,显示射流可以穿透进入边界层很深的距离,在射流出口诱导产生弓形激波,PSJ的作用大约在放电后10 μs开始显现。
国防科技大学、空军工程大学等也开展了相关研究,实验结果显示PSJ可以实现对超声速主流的有效扰动,在超声速主流中产生近壁面射流大尺度涡结构和马赫波、压缩波、干扰激波等多道强度不同的扰动波,如图39所示,其中近壁面射流和干扰激波在PSJ超声速流动控制中发挥主要作用。马赫波的产生是由于PSJ产生的强扰动穿过边界层后向上游传递,在演化过程中马赫波将保持直线型并不断上游移动,马赫波波后为超声速。干扰激波的产生一方面源于PSJ与主流的强相互作用,另一方面根据干扰激波的产生时间和形状发展过程推断,PSJ静态流场中的前驱激波在干扰激波的产生过程中也发挥重要作用,在开始阶段干扰激波为一道弓形激波,随后演化为一道斜激波。不同工况对比显示,激励器出口直径的增加会增大前驱激波强度和近壁面射流尺度,但对射流穿透度的影响较小,而射流的有效作用时间则会降低。出口倾角的减小会导致前驱激波强度的降低、射流大尺度涡空间尺寸的减小和射流作用时间的缩短。具有较大能量沉积的三电极PSJ可以产生更强的干扰激波、更大的射流穿透度和更长的射流作用时间,当放电电容由1.0 μF增大到3.0 μF时,无量纲参数由75增大到205,射流与主流的动量通量比由0.6增大到1.3。对PSJ激励器在超声速流场中工作特性的数值仿真进一步揭示,由于超声速主流较大的惯性作用以及对激励器腔体气体的引射作用,气体在激励器吸气复原阶段更难以被吸入腔体,因此超声速条件下的腔体回填速率相比静态条件下大幅降低,激励器的高频工作性能下降。
图39 PSJ与超声速横向来流相互作用[103-126]Fig.39 Iinteraction between PSJ and supersonic crossflow[103-126]
5.2 流动分离控制
与传统的压电式、电磁式合成射流类似,PSJ也可以实现流动分离的抑制。用于流动分离控制时,PSJ通常放置于分离区上游。垂直壁面喷射时候PSJ可以诱导产生准流向逆向漩涡对,以一定偏斜和俯仰角喷射时可以产生单个主流向漩涡,这些涡结构可以将边界层上部的高动量流体输运到边界层底部,使得边界层速度型更为饱满,形状因子减小,因此抵抗流动分离的能力增强。
ONERA团队将5个PSJ激励器分两排布置于一个20°角扩张斜面的上游,用来控制扩张斜面带来的流动分离,激励器出口设计为30°俯仰角和60°偏斜角,实验来流速度37 m/s,雷诺数6.2×10(基于斜面高度计算),结果发现PSJ激励频率在500 Hz以下时,随着激励频率提高,分离区不断减小,激励频率超过500 Hz时,分离区不再显著变化。Caruana等采用20个PSJ激励器的阵列来控制NACA0015翼型尾缘的流动分离,射流最大速度大约200 m/s,单个周期持续时间150 μs,激励器被放置于离前缘32%弦长位置,出口俯仰角和偏斜角分别为30°和60°,来流速度40 m/s,雷诺数1.2×10(基于弦长计算),攻角为11.5°,分离区范围覆盖弦长的一半,结果显示随着激励频率提高,分离区不断萎缩,当激励频率大于250 Hz时,分离区消失,流体完全附着。不同攻角结果表明,来流攻角11°时由于分离区较小,导致控制效果不明显,来流攻角12.5°时由于分离点到了激励器上游,导致控制效果较差。代尔夫特理工大学研究团队进一步开展了PSJ控制NACA-0015翼型流动分离的实验研究,与Caruana等实验不同的是其控制对象是翼型前缘的流动分离,且流场雷诺数为更低的中等雷诺数水平(1.7×10),实验结果进一步证实了PSJ的控制能力,在26个PSJ激励器的作用下,翼型的失速攻角由15.5°延迟到约22°,峰值升力系数较无控状态下增加了21%。
厦门大学团队开展了PSJ控制NACA-0012翼型流动分离的研究,共采用了2个激励器,来流速度40 m/s,雷诺数3.4×10(基于弦长计算),将激励器放置于15%和45%弦长两个位置,俯仰角为45°、60°两种,结果显示激励器位于15%弦长位置时能够使得失速攻角推迟2°,峰值升力系数增大约9%,阻力系数降低31.5%,两种俯仰角时的控制效果类似。空军工程大学团队开展了高升力翼型流动分离控制的研究,高升力翼型由EET(Energy Efficient Transport)翼型主翼和偏角30°无缝简单襟翼组成,结果显示PSJ可以抑制主翼流动分离,使主翼升力增大,但襟翼吸力面压力增大、升力减小,总体效果使得总升力增大、失速推迟,此外还发现激励器关闭后增升效果不会马上消失,而是存在延迟效应,延迟时间不小于585 s,来流速度提高后,激励器控制效果会显著弱化。
UTA的Greene等进一步将PSJ流动分离控制的范围拓展到超声速,开展了马赫数3超声速流场20°压缩拐角流动分离控制的研究,如图40所示,油流测试显示位于压缩拐角上游1.5(表示边界层厚度)、俯仰角20°、偏航角0°、激励频率3 200 Hz(斯特劳哈尔数=0.018)工况下的PSJ具有最佳控制效果,可使得分离线到压缩拐角的距离平均缩短40%,结果暗示激励的频率需要与分离区的固有频率相互耦合才能发挥较好的控制效果,当PSJ与压缩拐角距离大于3时控制效果将急剧弱化。王宏宇等开展了马赫数2超声速流场中利用头部喷射PSJ与钝头体弓形激波的相互作用来控制钝头体下游流动分离的研究,实验结果显示PSJ与钝头体弓形激波的相互作用可以使得激励效果放大,使得钝头体下游的边界层湍流度增强,进而导致边界层流动分离减小,研究结果也发现激励频率对于控制效果影响显著,当PSJ的激励频率更接近分离泡的固有频率时控制效果更好。
图40 超声速压缩拐角流动分离控制效果[51-52]Fig.40 Control effect of flow separation induced by compression corner in supersonic flow[51-52]
5.3 激波控制
国防科技大学在2014年首先开展了PSJ控制有限高圆柱激波的实验研究,结果显示PSJ使得圆柱弓形激波强度减弱,圆柱前分离区减小。根据PSJ位置可以将其分为布置于分离激波上游的U型射流和布置于分离激波下游的D型射流,对比显示U型射流比D型射流具有更好的激波控制效果,而对于U型射流,随着射流至分离激波距离的减小,PSJ控制效果增强。周岩等随后开展了PSJ控制压缩斜面激波的实验研究,控制过程如图41所示,结果显示在干扰激波和大尺度涡结构的双重作用下,压缩斜面激波强度减弱,近壁面部分被消除,从射流前缘到达斜激波左侧到控制作用基本结束,PSJ的作用持续时间约为400 μs。基于实验现象分析,国防科技大学将PSJ控制激波的机理归结为3种效应:① 波控效应,PSJ在超声来流下产生干扰激波,干扰激波降低了压缩斜面上游的马赫数,改变了气流方向,使得压缩斜面激波强度减弱,形状改变;② 热控效应,PSJ加热近壁面区域,增大当地声速,降低当地马赫数,使得声速线向上抬升,增加了激波的产生高度;③ 虚拟外形效应,PSJ在压缩斜面形成虚拟气动外形,虚拟外形后掠角度与压缩斜面后掠角相比变小,使得斜面激波角度和强度随之变小。南京航空航天大学开展了类似的压缩斜面激波控制研究,进一步发现射流干扰激波与压缩斜面激波发生相交,产生折射激波与透射激波,一开始的相交是一种常规的激波-激波干扰,随后会出现不规则的激波-激波干扰,产生连接干扰激波与压缩斜面激波的“马赫茎”结构。空军工程大学王宏宇等研究了PSJ对马赫数2超声速流场30°压缩拐角分离激波、再附激波的控制特性,结果显示PSJ对主流的阻滞作用使得分离区附近发生了一个“再压缩”过程,再压缩过程中,PSJ诱导产生压缩波,压缩波向分离区聚集、强度增强,形成新分离激波,使得分离激波角变大、强度增强,三叉点(分离激波与再附激波的交点)持续上升直到达到峰值。再附激波由于射流的热效应和上游马赫数减小而减弱,整体向上游移动,再附激波角度同样变大,再附激波、分离激波相向运动,聚集靠拢。此外张志波等研究了激励器阵列对激波的控制,结果发现流向阵列射流在演化过程中相互掺混,可以增加射流的穿透深度和射流角,对激波产生更强的扰动效果。

图41 PSJ控制压缩斜面激波流场阴影显示结果[103]Fig.41 Shadowgraph images of control effect on compression ramp shock wave by using PSJ[103]
5.4 激波/边界层干扰控制
Narayanaswamy等首先开展了PSJ激波/边界层干扰控制的研究,实验对象为马赫数3条件下的24°压缩拐角流场。壁面压力测量得到的功率谱显示,在对应于激波/边界层干扰低频不稳定性的范围内,干扰区某些位置的压力功率谱密度在控制作用下显著降低(图42(a)),而某些位置则未发生明显变化(图42(b)),其中表示分离区长度。分析认为其深入机理与分离泡的内部流场组织关系密切,需要进一步开展研究。高速纹影得到的流场结果显示,在PSJ冲击作用下,压缩拐角分离激波首先发生短时间快速上游移动(上移约1),如图43所示,之后激波位置慢慢恢复至下游。激波上游移动的现象有两个可能的原因:一是激励器向边界层内喷射了低动量(相对主流来说)的流体;二是局部流动加热导致当地马赫数降低,而较低的马赫数会导致激波到斜坡拐角的距离更大(即激波的脱体距离更大),之前对于激光能量沉积等流动控制技术的研究也发现了类似现象,即当热流体流过激波时,激波会发生上移。
图42 PSJ控制前后不同位置压力功率谱变化[49-50]Fig.42 Power spectra of wall pressure at different locations with and without PSJ[49-50]
1—激波时均位置; 2—激波瞬时位置图43 PSJ控制分离激波纹影结果[49-50]Fig.43 Schlieren images of control effect on separation shock by using PSJ
Narayanaswamy进一步研究了激励位置、出口构型、激励频率对激波/边界层干扰控制效果的影响。激励位置对激励效果存在很大影响,实验显示当射流喷射位置在分离激波上游时控制效果显著,但是在分离泡内时则没有效果,其结果可能是由于对剪切层的作用不同所致,PIV结果发现PSJ在上游引起的扰动将在剪切层放大,而在下游引起的扰动则没有这种效果,这也暗示了分离泡上边界剪切层在分离激波动力学特性中扮演着关键作用。对PSJ激励器出口构型的研究显示,垂直型、倾斜型和偏斜型3种出口构型的激励器均可以使得激波上移,不同的是偏斜型激励器还会使激波在上移前先向下游微弱移动(下移约0.25),其可能原因有两点:一是PSJ起到了与微型涡流发生器类似的作用效果,即诱导产生了流向涡结构,使得边界层抵抗逆压梯度的能力增强,因此分离区减小;二是射流含能涡结构作用于剪切层,使得剪切层失稳破坏,进而使得分离区减小,分离激波下移。利用2.3.1节介绍的激波捕捉程序获得的分离激波运动轨迹显示,当PSJ以一定频率工作时,分离激波的运动频率将被锁定为PSJ激励频率,并且当PSJ频率较高(约3.3 kHz)时,分离激波能够相对稳定地向上游偏移,激波运动幅值减小(运动幅度小于0.5),分离激波的运动被PSJ控制在一定范围内,而没有恢复到初始位置。
此外,Greene等还研究了PSJ对入射激波/边界层干扰流场的控制效果,初步的PIV测量结果表明PSJ对入射激波/边界层干扰区上游的流动分离有一定作用,但是由于PSJ的作用因为边界层的湍流耗散而急剧衰减,PSJ对干扰区下游的再附边界层等流场几乎没有影响。方剑等通过大涡模拟方法研究了马赫数2.3来流条件下PSJ对激波(由8°斜劈产生)入射边界层干扰流场的控制效果,表面摩擦系数分布结果显示施加PSJ激励时,分离泡尺寸减小了约35%,数值仿真捕捉到PSJ在超声速流场中诱导的流向涡结构,揭示了PSJ对分离泡的作用机制与机械式微型涡流发生器相类似,瞬时和时间平均流场结果显示,PSJ诱导流向涡的作用增加了上游边界层的混合,提高了边界层对流动分离的抵抗能力。
5.5 射流噪声抑制
射流噪声抑制是未来新型飞行器发展的重要挑战之一。根据20世纪60年代逐渐发展起来的涡声理论,射流噪声的产生源于流体中的涡与势流以及涡之间的相互作用。研究表明射流噪声中低频噪音的重要来源之一是射流与外部流场剪切作用产生的大尺度涡结构,通过在喷管上增加被动式的条带结构或者施加定常/脉冲射流等方式可以促进大尺度涡结构的破碎,进而降低射流噪声中的低频部分。
作为一种新型无源脉冲射流产生装置,PSJ激励器在射流噪声抑制方面具有潜在的应用前景,ONERA在这方面开展了初步的探索。文献[23,54]中介绍了6个PSJ组成的激励器阵列控制马赫数0.3~0.9亚声速射流剪切层的研究,射流喷管直径50 mm,呈环形布置的PSJ激励器阵列被放置在射流喷管的唇口位置,对射流与环境流体的剪切层和大尺度涡结构施加扰动,纹影流场显示观察到了PSJ激励对射流剪切层的显著作用,但消声室内的射流噪声测量发现,150 Hz、300 m/s和2 500 Hz、150 m/s两种激励器阵列对噪声的抑制效果均不理想,原因可能是激励器数目较少。文献[65]将激励器阵列数目增加到12个,开展了马赫数0.6射流噪声抑制的研究,喷管直径同样为50 mm,PSJ激励的斯特劳哈尔数为0.3,结果显示当相邻激励器以180°相位差工作时,射流噪声略微减小了约0.3 dB,但是以同相位工作时,射流噪声反而增加了3~4 B。为深入分析PSJ的控制机理,Chedevergne等开展了相应的数值仿真,为减小计算量采用混合RANS-LES计算方法进行了小空间尺度单个激励器的模拟,结果显示在对射流剪切层大尺度涡结构的扰动过程中,火花电弧放电产生的压力波扰动发挥了主导作用,脉冲射流的作用处于次要位置。目前PSJ在射流噪声抑制方面的研究仍处于起步阶段,噪声抑制效果有待提高,未来需要进一步增大激励器阵列数目和激励频率,并且借助更大空间尺度的数值模拟对PSJ阵列与射流剪切层和大尺度涡结构的作用机理开展深入研究,以实现控制效果的优化。
5.6 快响应气动力控制
高效快响应气动力控制对于高超声速飞行器至关重要,对于马赫数5的飞行器,控制每时延1 ms,就会产生15 m的脱靶量。传统的舵翼作动机构响应时间较长(约100~500 ms),并且随着飞行高度增加舵面的效率急剧下降。PSJ激励器依靠气体放电方式产生高速射流,响应时间相比常规机械机构大大缩短,基于PSJ激励器侧向喷流的快响应气动力控制技术是替代舵翼作动机构实现高超声速飞行器高机动飞行的潜在手段之一。美国罗格斯大学开展了PSJ进行飞行器气动力控制的理论分析,假设放电在腔体均匀进行,射流喷射进入静止环境,通过理论分析获得了PSJ激励器单个脉冲的力和冲量特性,并简化分析了PSJ用于气动力控制的可行性,计算结果显示PSJ阵列产生的作用力足够取代传统气动襟翼,但该结果仅是在PSJ激励器放电时间尺度上对比了PSJ与传统气动襟翼,在这个时间尺度上襟翼未完全偏折,因此对比的襟翼直接力并不是其完全偏折时候的效果。杨瑞等开展了PSJ进行高超声速飞行器气动力控制的数值模拟,将PSJ激励器布置于飞行器头锥、中部和尾部3个位置,分析飞行器表面压力分布、升阻特性以及俯仰力矩特性变化。结果表明PSJ控制响应时间约为0.2 ms,飞行器流场结构及气动特性随着射流激励出现周期性变化,通过合理布置PSJ激励器的位置,可以使得飞行器表面压力快速变化,从而实现飞行器姿态的快速控制。
5.7 其他应用
王鹏与沈赤兵开展了PSJ阵列控制马赫数2.39与1.37超-超混合层的实验与数值模拟,将PSJ激励器安装于混合层隔板上下表面以及隔板末端两个位置,结果显示PSJ可以有效增强混合层的厚度,如图44所示,但无法提高分形维数值,即无法增加小尺度涡结构的脉动强度。单个激励器的展向作用范围约为20 mm(6.67倍出口直径),激励器位于隔板末端时对混合层扰动效果较好,且控制响应时间较短。分析认为这是由于隔板上下表面布置的PSJ工作机理是通过作用来流进而影响混合层,而隔板末端布置的PSJ是直接作用在混合层上,进行实现混合增强。Natarajan等开展了PSJ用于飞行器推力矢量控制(Thrust Vector Control,TVC)的研究,将PSJ激励器放置在拉瓦尔喷管的扩张段用于取代传统的二次射流,利用PSJ产生不同强度的激波以生成合适的推力矢量。土耳其卡拉德尼斯科技大学Seyhan等开展了PSJ用于质子交换膜(Proton Exchange Membrane,PEM)燃料电池流场控制的研究,将PSJ激励器放置于燃料电池阴极附近用于产生流动的振荡。结果显示在较高氢气-空气流量条件下,PSJ的影响在到达阴极流道前就已经衰减。在较低流量条件下(氢气0.1 L/min、空气0.3 L/min),PSJ可以发挥较好效果,使得燃料电池的性能提升,峰值功率输出增大11%,推测原因可能是由于PSJ引起的流动振荡增强了在阴极通道内的氧气浓度和扩散速率。Seyhan等还认为目前实验较大的空气湿度使得PSJ激励器性能降低,在优化环境湿度的情况下PSJ可以达到更好控制效果。
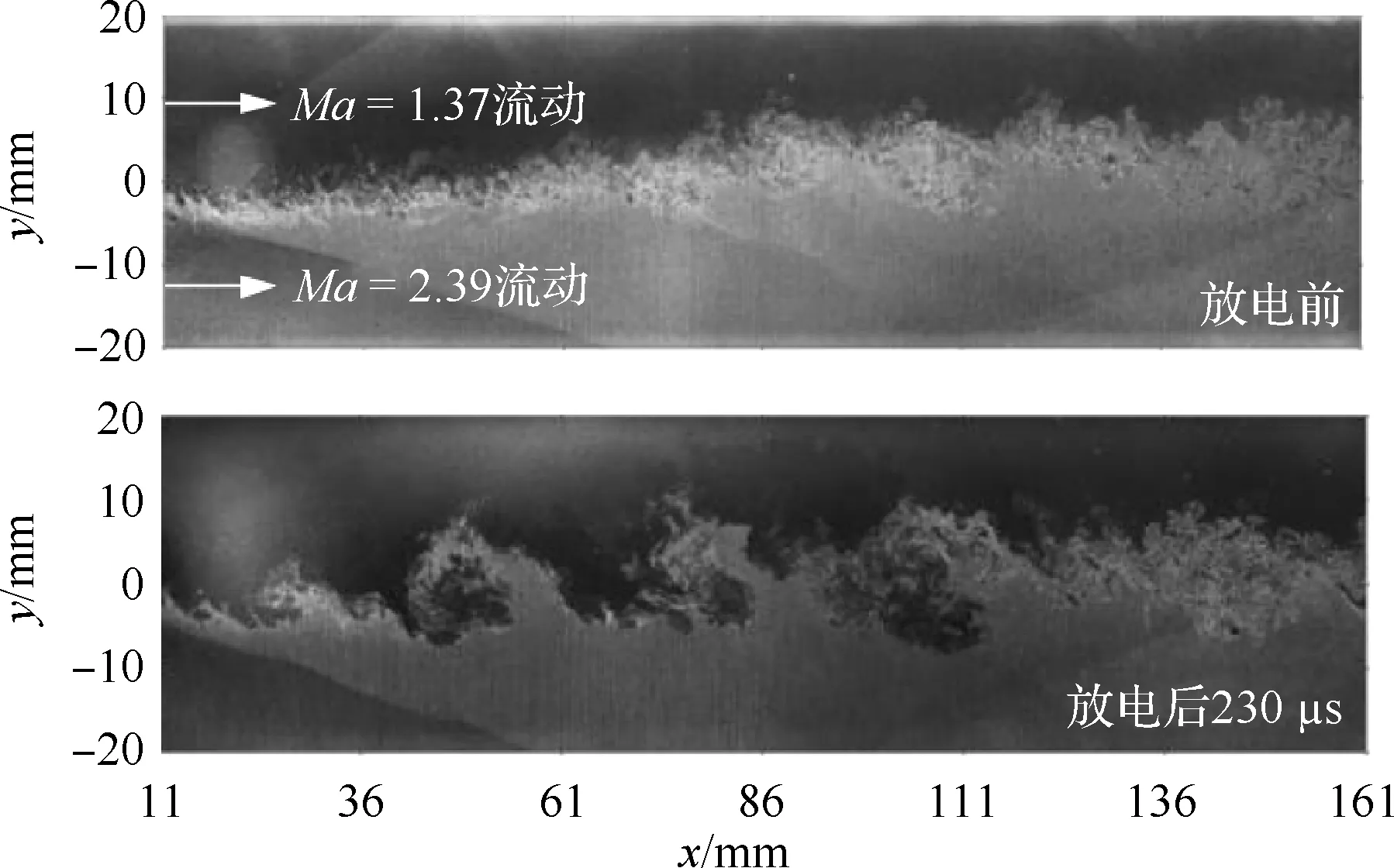
图44 PSJ对超声速混合层作用的NPLS结果[112]Fig.44 NPLS results of control effect on supersonic mixing layer by using PSJ[112]
6 结 论
1) PSJ激励器是一种应用前景广泛的新型主动流动控制装置,兼具合成射流激励器的零质量通量特性和等离子体激励器的宽频带、快响应特性,同时克服了二者诱导射流速度偏低的不足,为亚声速乃至高超声速流动控制提供了一种新的技术手段。
2) 单个PSJ激励器最初为两电极构型,后来逐渐发展为击穿电压较低、能量效率较高的三电极构型;为了改善高频放电和高空低密度环境下的工作性能,进而出现了单向阀补气式、冲压式、流场增压式等腔体增压型PSJ激励器;为了解决单个PSJ激励器控制范围有限的问题,近年来针对串联式(如直接串联、电压接力串联)、并联式PSJ激励器阵列系统的研究逐渐增多。
3) 针对PSJ激励器工作特点,多种改进的实验测量手段(如激光微纹影、高速定量纹影、脉冲接地动态压力测量等)在研究中得到了应用,但是由于工作空间狭小、电磁干扰强、射流持续时间很短且射流流场变化剧烈等原因,实验测量还无法获得PSJ激励器较为全面的信息,非定常零唯理论分析模型以及空气动力学模拟、等离子体动力学模拟方法在深入揭示激励器工作机理方面仍发挥着不可替代的作用。
4) PSJ激励器能量效率可以分为放电效率、加热效率和喷射效率3个部分,总体而言PSJ激励器的能量效率水平依然偏低,如何提升能量效率是激励器设计面临的关键问题;针对影响PSJ激励器性能的结构参数(如出口直径、腔体体积、电极间距)、放电参数(如放电能量、放电频率)、环境参数(如环境压强)目前已进行了大量研究,为PSJ流动控制应用及控制效果优化奠定了坚实基础。
5) PSJ激励器在抑制流动分离、减弱激波强度、降低激波/边界层干扰区域低频压力脉动等方面的控制效果已经得到了充分地面实验验证,在增强超-超掺混、降低射流噪声、快响应直接力控制等方面也展现出应用前景。未来需要在高效长寿命激励器、小型化电源等方面进行关键技术攻关,推进PSJ原理性飞行试验验证和工程应用,并且进一步探索PSJ在其他应用场景(如无人机防除冰、转捩阵面控制、燃料电池流场掺混增强、飞行器动态流场闭环实时控制)下的控制效果及可行性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:51:08
煤气与热力(2022年4期)2022-05-23 12:45:00
装备制造技术(2020年3期)2020-12-25 05:21:56
装备制造技术(2020年1期)2020-12-25 05:18:16
航空学报(2020年8期)2020-09-10 03:25:34
航空发动机(2020年3期)2020-07-24 09:03:16
实验流体力学(2018年3期)2018-10-10 03:10:12
橡塑技术与装备(2018年5期)2018-03-17 07:10:56
北京航空航天大学学报(2017年8期)2017-12-20 08:04:50
中国舰船研究(2015年2期)2015-02-10 06:45:55
