
固定翼无人机串联混电系统设计方法
2022-04-25 07:20杨大亮
电子元器件与信息技术 2022年3期
杨大亮
(河北工程大学,河北 邯郸 056038)
0 引言
垂直起降固定翼无人机是集多旋翼无人机和固定翼飞机于一体的新型无人机,巡航效率高、飞行速度快、起降方便、能够应对更复杂的应用场景,是近年来无人机领域的研究热点之一。但过去使用的纯电力系统并不理想,与纯动力系统相比,串联混合动力系统增加了一个新的有源功率单元,由发动机、发电机和能量管理系统组成,电池仅在需要大功率时用于辅助功率单元与电源[1]。采用此种设计方案后,在系列混合动力系统设计空间中的垂直起降固定翼无人机,可以从固定翼无人机早期设计阶段顶层设计要求和转换中,快速探索出最佳供电策略和设计方案,从而通过大规模配电方案串联完成混合动力系统[2]。
1 固定翼无人机串联混电系统研究现状
由于燃料的高能量储存密度与系列混合动力系统的引入,极有可能使固定翼无人机在起飞时间少量增加的情况下,大大提高垂直起降耐力。同时,引入混合动力系统后,所拥有的质量和能耗对无人机的设计而言也存在一定的影响。在初始设计阶段,一系列混合垂直起降固定翼无人机和纯电动混合动力转换的垂直起降固定翼无人机对一系列混合动力系统进行优化设计的一个重要手段,就是对飞机平台顶层的设计。对相关要求进行最优运行策略方向转化,动力与质量配电混合动力系统设计是无人机混合动力充分发挥优势的关键[3]。当前的飞行器总体设计领域中,混合系统这个研究项目也很少见,且主要以国外研究成果为主,其中Finger等[4]、Vries等[5]的研究成果中,分别对串联与并联混电系统运用在固定翼无人机的传统研制进行了分析,并对混电系统的后续使用、固定翼飞行器的不同参数设计及影响进行了分析。
以往设计优化多是在一维层面进行优化处理,但对垂直起降固定翼无人机的优化,则需要对飞行的多种模式进行处理,如旋转翼、转换翼和固定翼,其飞行剖面复杂,在不同的运行条件下,功率需求变化很大。且固定翼无人机的优化设计需要考虑,在整个飞行剖面中不同飞行阶段时期不同混合动力系统的不同运行策略内容。其所需要设计的领域更广,且所具备的设计维度也更高。同时研究还发现,固定翼无人机混合动力系统在接受优化的过程中,还存在一些较为特殊的设计问题,因此需要特别注意固定翼混合动力系统优化设计过程中的相关问题[6]。
2 固定翼无人机串联混电系统设计方法
2.1 物理数学模型
2.1.1 功率需求模型
垂直起降固定翼无人机(uav)包括:倾转旋翼无人机、尾翼无人机等多种具有垂直起降和固定翼的无人机。对于具有飞机飞行能力的无人机,虽然配置大有不同,但场景是相似的,均包括固定翼、旋翼和主要飞行模式的模态转换。因此,不同配置的垂直起降固定翼无人机的功率要求可以在系统设计中以相同的方式描述。垂直起降固定翼无人机在固定翼模式下的典型工作要求,包括巡航/续航飞行、爬升、实际升力限值、最大飞行速度等。功率表现为:

式(1)中,W为起飞总重;S为机翼面积;g为重力加速度;β为燃油质量消耗系数;q为飞行动压;CD0为零升阻力系数;K=1/(πe·AR)为升致阻力系数,AR为机翼展弦比,e为奥斯瓦尔德因子;h为飞行高度;dh/dt为爬升率;V为飞行速度;ηP为螺旋桨效率。在巡航/续航飞行及最大速度飞行过程中,dh/dt=0。
模态转换飞行所具备条件复杂性较高,且所具备的持续时间较短。该模式之下应用的动力系统所表现出的动力需求,会受到VTOL固定翼无人机转换策略、机型等各项因素的直接影响。在初步设计阶段,最大起飞推重比(T/W)max可以用来表征转换过程中的功率裕度:(T/W)max的值越大,转换过程中的功率裕度越大,转换过程的持续时间越短,安全性越好;(T/W)max典型值,所需要控制的数字范围为115~1.5。与之相对应,转换模式之下,电力系统的功率需求则为:

2.1.2 混电功率解算方程
垂直起降固定翼无人机混合动力系统主要由螺旋桨、旋翼、电驱动器、主动力单元(包括发动机、发电机、能量管理系统)、辅助动力单元(电池)等部件组成,图1则明确该系列混合系统的主要结构和动力传输路径。这条路径包含两个必需的功率,即加载设备的电源、螺旋桨/转子的总吸收功率和四个内部工作功率。
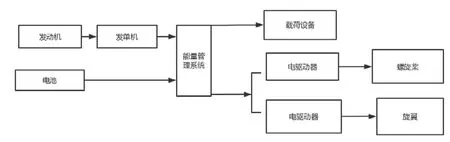
图1 串联混电系统功率传递路径
根据功率传输路径,建立混合功率解方程。混合功率解方程由三个功率传递方程和一个混合控制方程组成。功率传输方程用来说明汽车发动机、能源系统以及动力传动装置中的输入能量与输出功率间的对应关系的术语,Η、ηgE和ηED分别指电能系统、发动机和电驱动的能量传输效率。利用混合功率控制方程描述了在正常飞行状况下,主功率单元与辅功率单元(电池)间的功耗比。通过对串联混合动力系统各级运行功率的计算,可以得到串联混合动力系统各部件的设计功率。它有自己的电力设计,如电力驱动器、电池、发电机和能源管理系统,不受高度变化的影响。
2.1.3 混电质量计算模型
垂直起降固定翼无人机串联混电系统中电池的质量受能量需求和功率需求限制。表示如下:

除电池组外,串联混合动力系统的其他部件、并联混合动力系统的其余部分的总质量仅由最大设计输出功率确认并计量。其中,基于发动机、发电机和电力驱动的电能质量数据建立了大量现有产品,并采用Jay提出的方法校正最大电压UEd与最大值等数据之间存在的差异[7]。
2.1.4 燃油消耗模型
垂直起降固定翼无人机串联混电系统在整个飞机剖面内产生的总燃料损耗,相当于各试飞阶段燃料损耗之和,如下:

在串联混合动力推进体系的设计流程中,由于发电机设计功率无法预先给出,所以可以采用威兰线法对油耗特性曲线加以预处理,使其具有可扩展性。Willan直线法是一种被广泛应用并得到验证的准静态方法,可以根据类似发动机的试验数据预测未知比例发动机性能数据。在串联混合动力系统中,要降低电能系统的质量,就必须保证发动机与输出电流的平衡,这就需要发电机在最高速度附近正常工作。电动机速度根据发电机的额定输出电流公式以及千伏值确定,也就是NGe=UGe/kVGe。根据燃油消耗曲线维兰德线方法计算,在这个速度下每个飞行阶段发动机的运行功率,与单位燃料消耗率对应,然后代入公式,完成在整个飞行剖面中燃料消耗的计算。
2.2 设计参数优化
2.2.1 问题描述
优化设计的垂直起降固定翼无人机系列混合动力系统,可以充分发挥混合动力系统的优势,实现最好的无人机系统性能优化的电力供应战略,在每个飞行阶段制定任务概要设计和质量分配计划。该优化问题可表示为:
按照垂直飞行起降固定翼无人机的任务类型和设计特点,设定了约束的种类和数量。因此,为延长电池寿命,可设定连续充电时间下限以防止充电功耗过大等。
2.2.2 问题求解
应用柯西变异粒子群优化算法[8]进行求解连续优化问题。在k维设计空间中,s粒子的初始位置由拉丁超立方实验设计方法确定。在一次迭代中,可以通过柯西变异方法对每一代中具备最好适应度的全局优化粒子数做进一步的扰动,从而减少局部扰动进入计算最优解之中。在多次迭代处理后进行假设,每一个粒子在某一区域周围集中后,此区域不会因迭代步数增加随之改变,则结果可确认计算为收敛。同时粒子ψ则具备满足度最佳值,其值为优化问题的全局最优解,如公式(5)所示。在此基础上,将优化动力运行策略和动力系列的混合动力系统置于每个飞行阶段,并通过设计飞机各部分的动力与质量分配方法,实现垂直起降固定翼无人机系统的优化设计。
3 结语
固定翼无人机机翼外端后掠角可以自动或手动调节。因其优势明显,深受业界青睐。固定翼无人机具有长航时和高空飞行的特点,目前已广泛应用于测绘、地质、石油、农林等行业。
本次研究所提出的系统优化方案,可以对垂直起降固定翼无人机进行有效捕捉,并结合其任务廓线、所具特性等进行调整,内容包括执行策略、设计参数等。可用于纯电动混合动力转换的垂直起降固定翼无人机的发展和纯石油平台,作为一个独立的功能模块,可以嵌入在一系列的完整设计过程中。混合动力电动垂直起降固定翼无人机平台所具备的使用前景明确,而此方案的误差,主要集中在统计分析之中,对于某些成分之间,具备预测值以及真实值存在的残差问题。这种误差的影响可以通过运用有限表代替统计公式来消除,后续研究需要进一步增加计算与分析面等。
猜你喜欢
少男少女·教育管理(2022年3期)2022-05-12
北京航空航天大学学报(2021年4期)2021-11-24
舰船科学技术(2021年12期)2021-03-29
青少年科技博览(中学版)(2020年12期)2020-03-29
航空模型(2016年10期)2017-05-09
航空模型(2016年10期)2017-05-09
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
中学生数理化·八年级物理人教版(2016年5期)2016-08-26
作文周刊·小学一年级版(2016年11期)2016-05-10
新高考·高一物理(2015年3期)2015-08-20
