
汽车近光模组热力光耦合仿真分析
2022-04-24 07:07尹丽伟
照明工程学报 2022年1期
史 强,尹丽伟,李 茹
(常州星宇车灯股份有限公司,江苏 常州 213022)
引言
随着汽车发展水平的不断提高,汽车变得越来越科技化、智能化。汽车灯具在满足日常照明需求的同时,功能也变得越来越丰富、智能,如:LED动态车灯、激光车灯、感应式车灯等。LED式灯具在市场中的份额在逐渐增大,逐渐替代了传统的卤素灯泡式车灯,LED车灯有着高亮度、寿命长、智能化等优点。
LED车灯中最重要的模块为远、近光LED模组,LED模组主要由PCB电路板、挡板、透镜、透镜支架、反射镜、散热器等部件构成。LED点亮后发出光线,产生热量,热量通过PCB电路板和散热器排放到空气中,光线则经过反射镜反射作用,穿过透明透镜发生折射,沿着水平方向照射到远方的路面上。LED产生的热量经过热传导和热辐射的方式传递到整个近光模组上,零部件受到热量的影响,材料会产生热膨胀变形,微小的变形量会对光线的光型分布产生巨大的影响,这会导致实际近光截止线偏离设计时的位置[1]。
本文为了研究热-力耦合场[2]对光线截止线分布的影响情况,采用有限元仿真方法对近光截止线偏移现象进行仿真分析,并且根据近光截止线偏移试验测试结果,对比分析了仿真模拟的精度,根据仿真分析结果对近光模组的结构提出合理的建议,为灯具前期设计分析提供了参考依据。
1 热力光耦合分析原理
1.1 热学分析原理及基本方程
热量仿真分析主要基于连续性方程、动量方程、能量方程[3]配合辐射物理模型、流动物理模型等进行求解:
连续性方程:

(1)
式中:ρ表示密度,u、v、w表示三个方向的分速度。
动量方程:
(2)
(3)

(4)
式中:ρ表示密度,u、v、w表示三个方向的分速度,F表示单位质量上的质量力,p表示对称应力张量。
能量方程:
(5)
式中:keff为有效导热率,ρ表示密度。
为了分析LED光线对零部件的辐射加热,采用DO辐射模型[4]求解分析灯具内部的辐射传热[5]过程,辐射传播方程如下:

(6)
式中:λ为辐射波长,αλ表示光谱吸收系数。
热-力[6]耦合弹塑性有限元方程:
在有限变形下,采用更新的拉格朗日法,以增量步长开始时刻t的构形为参考构形,则增量步长末t+Δt时刻的平衡方程为:
(7)
式中,σ为t时刻的第二Piola-Kirchhoff应力,εG为t时刻的Green应变,q为体积力,V、Vt分别为变形体在增量步长开始、结束时的体积,p为表面力,δu为虚位移,A为变形体的表面积。
在有限变形弹塑性本构方程中,用柯西应力导数表示的应力速率为:
σ=L(T)[D-Dp(T)-αTI]
(8)
式中,D为总应变率张量,Dp为塑性应变率张量,L为弹性本构张量,T为温度,α为热膨胀系数。
1.2 光线传播原理
光[7]在同种介质中以直线的方式传播,当光线经过两种不同的介质时候会发生反射和折射现象,光的传播路径可以通过费马原理来确定。
费马原理提出经过空间中两个固定点的光,实际行走的路径总是光程最短。后来在费马原理的基础上引申出来光的几何原理,光线在真空中以直线的方式传播[8]。光线如果在截面上发生反射,则反射角必须等于入射角。如图1所示,光线如果经过两种透镜的介质会发生折射现象,折射光线位于入射光线和界面法线所决定的平面内,入射角θ1和折射角θ2的正弦比值为一个常数能n21。
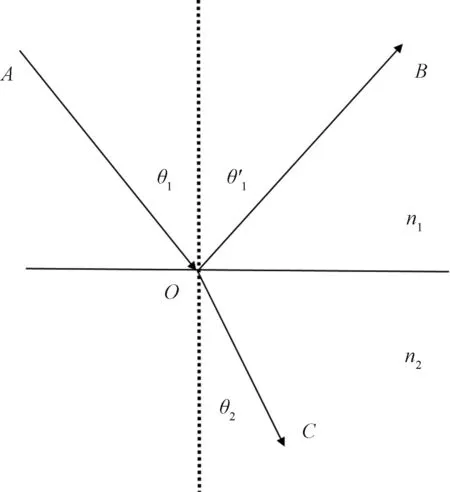
图1 光线传播路径示意图Fig.1 Schematic diagram of light propagation path
2 近光模组截止线热力光耦合分析
2.1 几何建模
建模时保留零部件大部分的几何特征,简化小的圆角、花纹等不影响结果的特征结构。螺钉孔、卡扣等连接结构、反射镜内部的光学面、透镜表面的微结构、LED元器件的真实发光表面形状特征等都需要保留。
在透镜模组四周建立空气域,空气域+X方向距离约为模组中心到前方灯罩的距离,-X方向距离约为模组中心到后方壳体的距离,±Z方向距离约为壳体的上下空间大小,±Y方向距离参考模组到左右部件的距离,如图2所示。
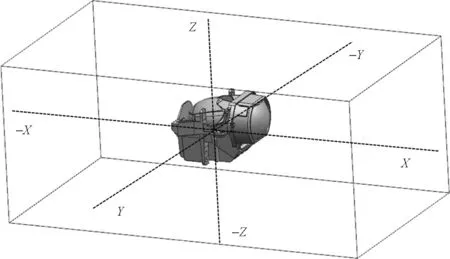
图2 近光模组几何模型示意图Fig.2 Schematic diagram of geometric model of low beam module
2.2 热量模拟
本文采用Fluent软件对模组点灯过程中,各零部件的热量场[9]分布进行仿真分析。Fluent求解较为复杂的辐射传热问题时,具有计算精度高、求解速度快等优点。
在热量模拟前处理时,为了控制网格的数量,可以简化掉例如侧花、皮纹、小的圆角等特征。为了保证热量求解的精度,对于一些尺寸特征较小、对热较敏感的零部件,例如LED颗粒、截止线挡片、透镜等采用网格加密处理。热量前处理结束后,固体零部件加上流体空气总网格数量控制在300万左右。
Fluent热量模拟时,选用DO辐射模型模拟点灯过程中的辐射能量分布情况,由于点灯导致环境温度升高,空气密度受到温度的影响产生变化,高温气流往上流动,冷却气流往下流动,故选用自然对流层流模型来模拟气流的流动过程。从LED发射出的光线中往往带有很高的能量,热量模拟的时候需要考虑光线中能量对零部件温度的影响情况,Fluent中设置LED发光面为辐射源,定义辐射强度和发光角度的函数关系,并定义辐射通量。
如图3所示为高温点灯后,近光模组单个零部件温度分布云图。热量从LED中心逐渐向四周传递,由于透镜固定在支架上,距离热源较远,故透镜前表面温度较低;反射镜安装在PCB板上,故安装点的温度较高;支架通过螺钉安装在散热器上,由于散热器温度较高,故支架安装点处温度较高。
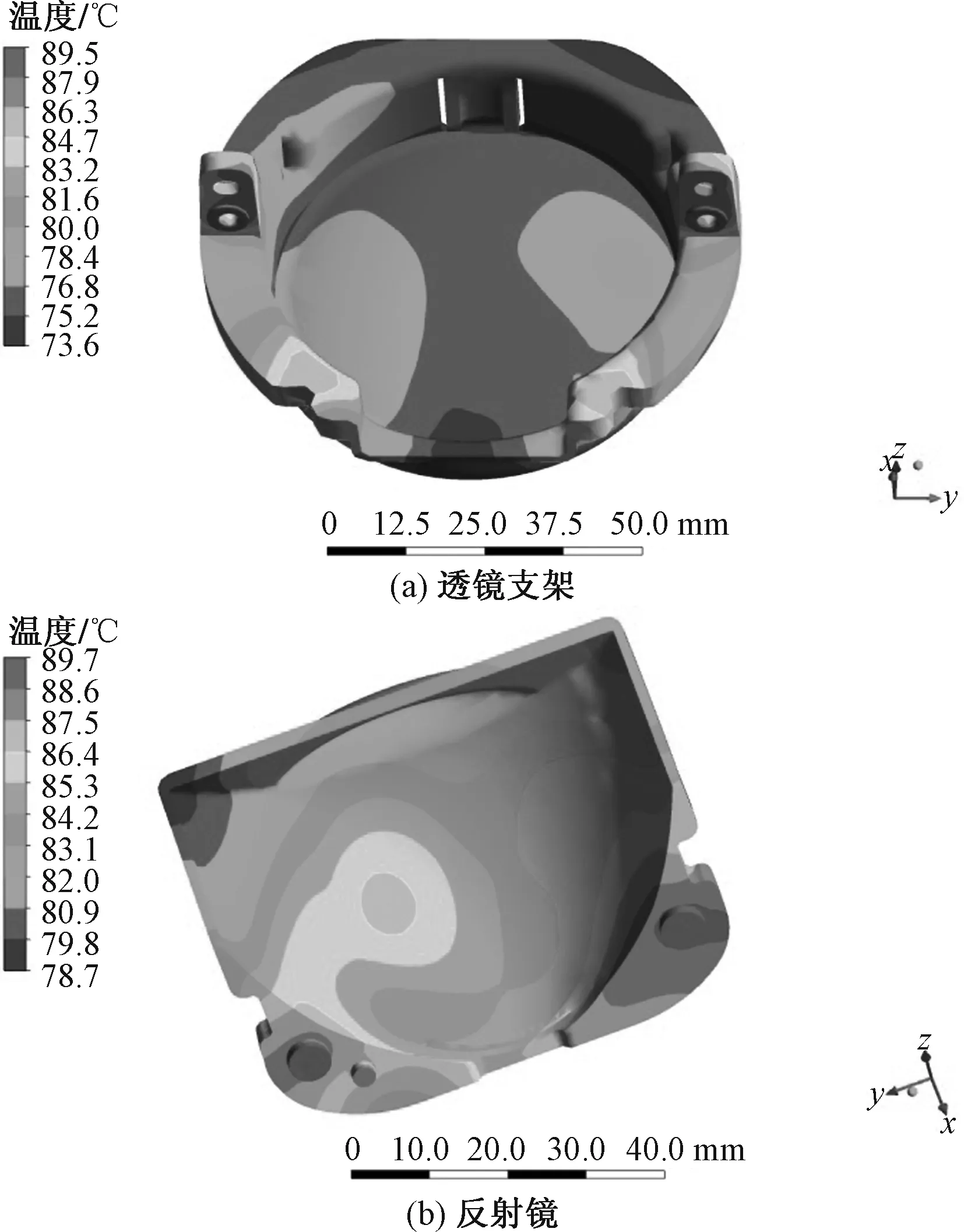
图3 近光模组单个零部件温度分布图Fig.3 Temperature distribution diagram of single part of low beam module
为了保证热量模拟的精确性,对近光模组高温点灯过程进行温度测试。如图4所示,根据热量模拟的结果,采用K形热电偶对高温点进行布点,在高温点附近可以布置1~2个热电偶。由于热电偶对光线较为敏感,布点的时候应避免热电偶被光线照射。布点完毕后将模组安装在工装上放入烘箱中,观察到热电偶的数值和测试时间曲线保持平稳时,记录热电偶的温度数值。
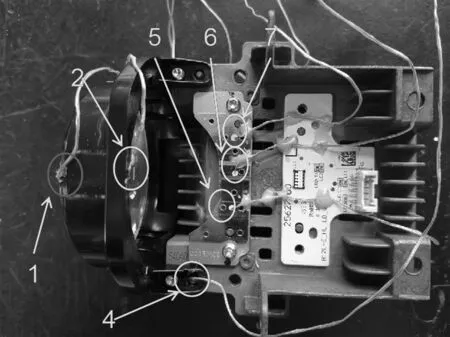
图4 近光模组温度测试布点图Fig.4 Distribution diagram of low beam module temperature test
如表1所示,将零部件温度测试数值和模拟数值进行误差比对。从误差分析来看,测试数值和模拟数值的误差率在10%以下。
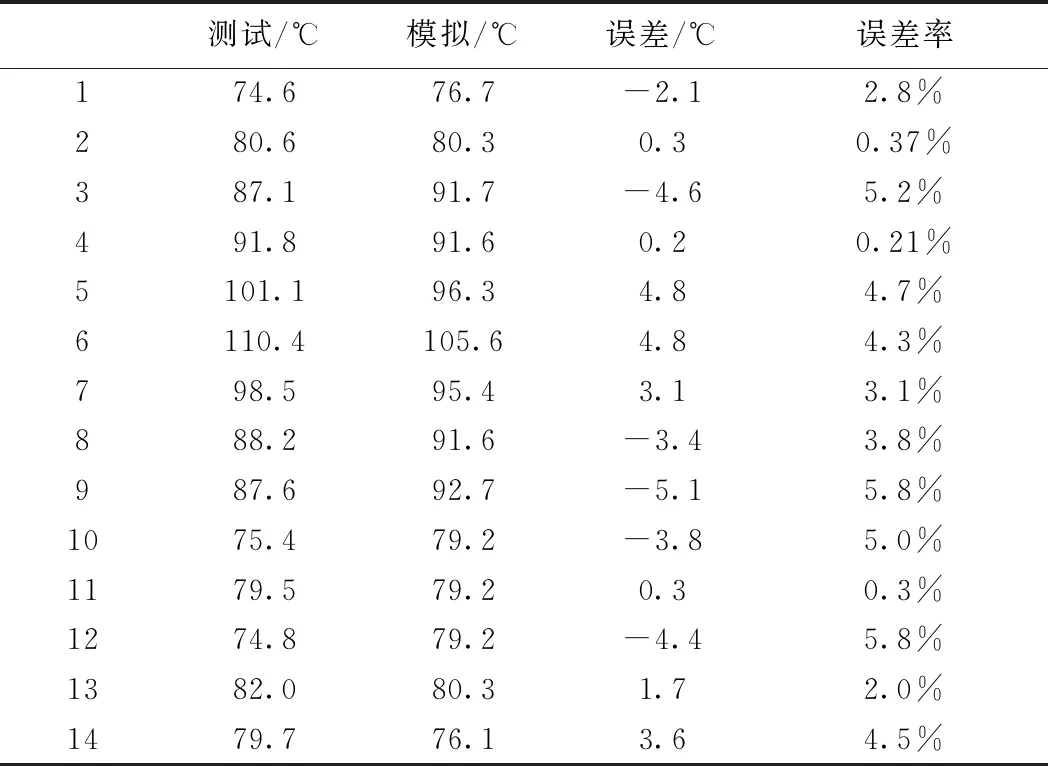
表1 测试温度和模拟温度误差分析表Table 1 Error analysis table of test temperature and simulated temperature
2.3 热力耦合场分析
本文采用NX NASTRAN软件仿真分析近光模组点灯过程中,模组整体及各零部件的变形情况。NASTRAN软件求解结构模态、振动、线性问题及非线性问题时,具有材料库齐全、求解精度高、收敛性好等优点。
采用ANSA前处理软件对模组各零部件之间进行约束连接,零部件之间采用螺栓、铆接、涂胶等方式连接时,采用共节点或者1D蛛网刚性连接方式建立约束方式。零部件之间采用插销、挡筋等限位方式连接时,采用摩擦接触约束方式处理。零部件之间采用卡扣等卡接方式连接时,采用RBE3柔性约束方式处理。
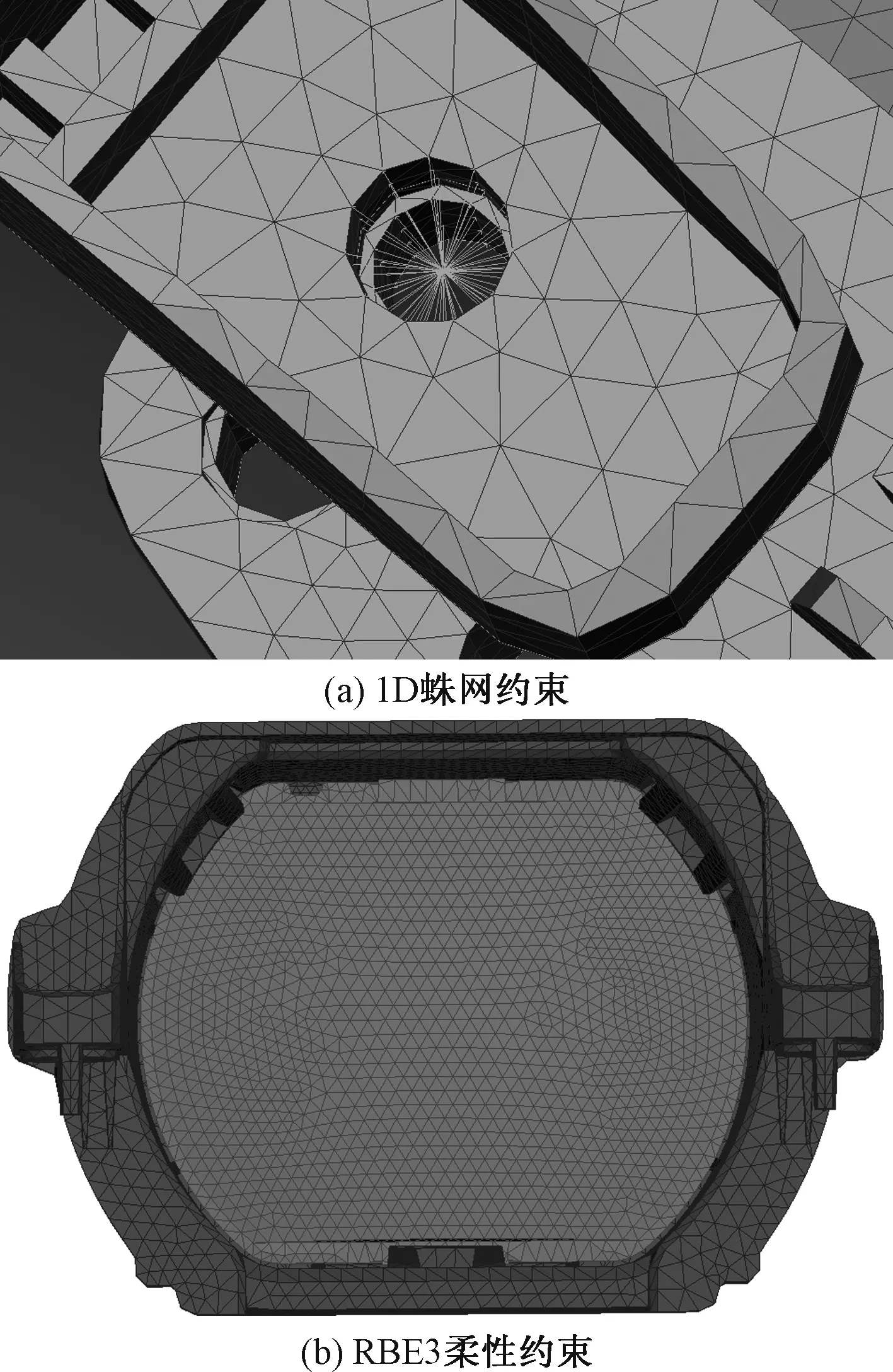
图5 零部件约束连接示意图Fig.5 Schematic diagram of component constraint connection
在NASTRAN中定义各个零部件的材料属性,如密度、杨氏模量、泊松比、热膨胀系数。材料的杨氏模量随着其温度的升高呈逐渐下降的趋势,因此定义材料的杨氏模量时需要定义杨氏模量关于温度的函数关系式。材料的热膨胀系数在某个区间内部为一常数。如果温度的数值超过该区间,需要定义热膨胀系数关于温度的函数关系式。
将Fluent模拟出的各零部件温度数值导出至文本文件中,在NASTRAN中创建温度载荷集,导入Fluent生成的温度文本文件,即可将每个节点对应的温度数值以边界载荷的形式映射到力学求解模型上,图6为整个模组的温度载荷示意图。
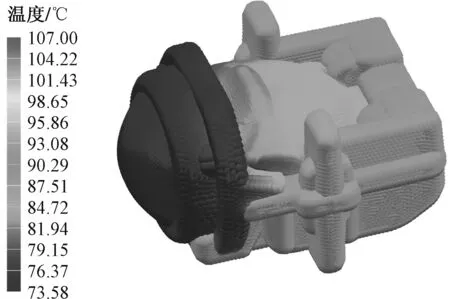
图6 近光模组温度载荷示意图Fig.6 Schematic diagram of low beam module temperature load
模组整体的约束方式按照实际试验的状态进行设置,考虑重力作用,模拟时候加入重力方向。图7为模组整体变形云图,从图7中可以看出,散热器为金属件抗热变形能力较强,故其变形量较小。支架由于和高温散热器接触,接触脚温度较高,受到温度和锁付方式的影响,支架带着透镜往上方和前方变形,整体呈逆时针翻转趋势。从云图可以看出,反射镜后方通过两颗锁钉和散热器锁付在一起,变形量很小,当反射镜温度升高,由于反射镜前方为自由状态故反射镜也会往上前方变形。
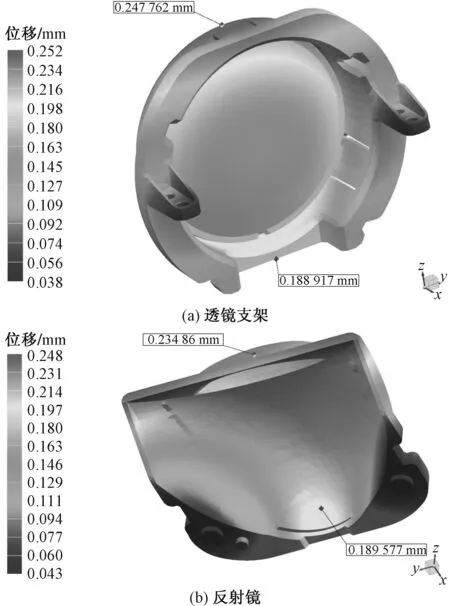
图7 近光模组各零部件变形示意图Fig.7 Schematic diagram of deformation of parts and components of low beam module
2.4 光型分析
近光模组受热产生变形后,对照射在远处路面上的截止线光型有很大的影响。采用Lucid Shape软件模拟分析高温点灯至稳定状态后,近光截止线光型的分布情况。
图8为近光截止线下跌试验测试图。图8(a)为常温点亮后,远处10 m屏幕上的截止线位置分布图,光线从上往下分为紫色光带、蓝色光带,标记紫色光带上沿初始位置如绿色线。
将近光模组放入高温烘箱点至稳定状态后,立刻标记光线的位置,如图8(b)所示,红色线为紫色光带上沿试验后的位置,可见紫色光带在远方10 m屏幕上下跌了56 mm,截止线在高温状态下也变得模糊、虚化。

图8 截止线偏移试验测试图Fig.8 Test diagram of cut-off line offset test
通过NASTRAN软件分析得到,近光模组高温点灯至稳定状态,模组整体的变形量。通过NASTRAN将反射镜、挡光铁片、透镜变形后的结果输出,在ANSA中将变形网格面进行实体化处理,再输出实体面数据给光学软件Lucid Shape进行光型模拟。
图9分别为常温点灯状态和高温点灯状态,近光截止线在远处10 m屏幕上的光型模拟分布图。常温点亮时,截止线水平段在10 m远处屏幕上位于0.1°处;高温点亮后,截止线水平段在10 m远处屏幕上位于-0.2°。前后对比分析得,高温点灯状态下,近光截止线在远处10 m屏幕上下跌了0.3°,下跌距离为52 mm,模拟结果和试验测试结果误差为7%。

图9 截止线偏移模拟分析图Fig.9 Simulation analysis diagram of cut-off line offset
由上述模拟和试验结果看出,高温引起部件变形导致截止线出现偏移现象。通过热力耦合仿真模拟得到部件的变形结果,根据零部件变形结果可以模拟出截止线跌落的现象。
在灯具设计初期,通过热力耦合模拟方法对比分析灯具点亮前后的光型结果,可对模型结构进行优化设计。
3 结论与后期展望
随着汽车灯具的不断发展,设计出一款功能丰富、质量优益的灯具已经越来越受到广大消费者、汽车生产厂商的重视。本文以某款车型的前照灯模组为研究对象,建立模组热力耦合有限元模型,采用有限元仿真的方法模拟出了截止线光型的偏移现象,热量模拟误差为10%以下。通过采用变形后面数据进行光型分析得出,高温点灯状态下,近光截止线在远处10 m屏幕上下跌了0.3°,下跌距离为52 mm。由截止线偏移试验得出,灯具点亮至稳定状态后,截止线在远处10 m屏幕上跌落了56 mm,对比试验测试结果,仿真分析的误差为7.1%左右,故热-力耦合仿真分析得到的灯具部件变形数据正确合理。在灯具前期设计阶段可以通过热力耦合仿真的手段,优化灯具设计结构,缩短开发周期,降低开发成本。
灯具热力耦合仿真分析是一个很复杂的工程问题,该问题涉及光学、热学、力学、材料学等多个学科领域,本文仅仅研究了其中的一部分,后期仍然有很多问题需要去研究探讨,如:材料内部的残余应力释放、材料的蠕变效应、热应力的实验测试等。
猜你喜欢
通信产业报(2020年31期)2020-09-10
现代装饰(2019年10期)2019-10-17
电子技术与软件工程(2019年17期)2019-10-09
电子制作(2019年12期)2019-07-16
电子制作(2018年8期)2018-06-26
IT经理世界(2017年10期)2017-05-26
山东青年(2016年1期)2016-02-28
山东青年(2016年2期)2016-02-28
海外星云(2015年15期)2015-12-01
微型小说选刊(2015年5期)2015-06-05
