基于航程的方向舵卡死飞机任务放弃杀伤判定方法
2022-04-24 03:00陈志伟裴扬葛玉雪彭钱诚袁婕
北京理工大学学报 2022年4期
陈志伟,裴扬,葛玉雪,彭钱诚,袁婕
(西北工业大学 航空学院,陕西,西安 710072)
目标易损性分析是毁伤评估的核心基础问题[1],飞机属于典型高价值目标,有必要对其开展易损性研究. 飞机易损性指飞机不能承受损伤机理一次或多次打击的程度,杀伤等级包括损耗杀伤、任务放弃杀伤和迫降杀伤,其中任务放弃杀伤指破坏程度使它无法完成规定任务,但仍具有最低程度飞行能力而不被移出作战编制[2]. 导弹破片可导致飞机液压作动器和操纵面之间的铰链、拉杆和其它连接件卡死,使操纵面固定在一定偏角. 考虑弹目交汇的随机性[3],命中飞机破片可能较少或未引起其他关键部件毁伤,仅导致操纵面卡死. 使用容错控制等方法,操纵面卡死飞机可保持受控飞行,但气动阻力的增加会减小飞行航程,飞机仍可能无法完成预定任务. 对于操纵面卡死后操稳特性等满足任务需求的毁伤情况,可以从剩余航程角度判定飞机是否达到任务放弃杀伤等级,为作战决策提供参考.
目前飞机任务放弃杀伤方面的研究还较少. YANG等[4]针对无人机关键系统可能发生的故障,基于早期预警信息设计了任务放弃最优策略,但其研究没有涉及飞机损伤. 从航程角度判定飞机任务放弃杀伤时,需在线快速计算飞机剩余航程,但目前开展航程在线求解研究还存在一些障碍. 首先,航程计算的运算量较大,导致计算时间过长而无法满足实时性要求. 针对此问题,NOROUZI 等[5]估算方向舵卡死飞机飞行包线的研究方法具有参照性,其首先离线构建了不同卡死角下的飞行包线数据包,然后在飞行中根据实测操纵面卡死角对数据包进行插值,实现飞行包线的在线估算,其中卡死角度可通过算法快速在线辨识. 其次,文献[6 - 7]求解飞机爬升、巡航和下降段航程时,发动机推力等参数通过纵向配平得到,研究对象为纵横气动可分离的完好飞机,但方向舵卡死将导致飞机纵横向之间出现气动耦合,现有计算方法不再适用.
针对上述问题,本文选择方向舵卡死飞机为研究对象,首先论述了基于航程的任务放弃杀伤判定流程;然后参照未受损飞机航程求解过程,提出了考虑纵横向气动耦合的方向舵卡死飞机航程计算方法;最后使用仿真算例对上述方法进行验证,分析了方向舵卡死对航程影响并判定了不同卡死角下的任务放弃杀伤.
1 问题描述及判定流程
1.1 问题描述
以运输机为例,其飞行剖面通常包括起飞、爬升、巡航、下降和着陆段,如图1 所示. 起飞和爬升段通常位于己方空域,巡航段可能靠近危险空域而遭遇导弹打击,导致飞机操纵面卡死,如图中星形位置.

图1 运输机飞行剖面示意图Fig. 1 Flight profile of the transport aircraft
凭借现代控制技术或飞行员操纵经验,操纵面卡死飞机仍可以保持稳定受控飞行. 操纵面卡死将增大飞行阻力而减小航程,可能导致飞行性能满足需求的受损飞机因航程不足而无法完成任务. 因此对飞行性能等均满足要求的操纵面卡死飞机,从剩余航程的角度判定飞机是否放弃任务.
1.2 任务放弃判定流程
操纵面卡死飞机任务放弃杀伤判定流程如图2所示,包括离线和在线两部分内容. 离线方面,基于任务剖面不同飞行时刻的飞机数据参数,求解不同操纵面卡死角下的飞机剩余航程,构建操纵面卡死飞机剩余航程数据包并将之存储于机载计算机. 在线方面,飞机遭遇操纵面卡死后,首先使用辨识算法得到操纵面卡死角度;然后基于卡死角对剩余航程数据包插值处理,得到受损飞机的剩余航程;最后通过任务剖面确定航程阈值,比较其与剩余航程大小判定是否放弃执行任务. 其中航程阈值为任务剖面内受损飞机继续完成任务所需航程.

图2 基于航程的飞机任务放弃杀伤判定流程Fig. 2 Judging process of mission abort kill based on flight range
本文旨在论述上述判定流程并验证其有效性,研究内容不涉及图中的数据包构建、操纵面卡死角辨识及航程在线插值. 此外,飞机在巡航段遭遇打击后,剩余巡航段航程通常远大于下降和着陆段,可认为受损飞机的航程损失主要取决于巡航段. 因此,本文预留着陆段和下降段燃油,通过比较巡航段剩余航程与任务所需巡航段航程阈值判定飞机任务放弃杀伤.
2 巡航航程计算方法
2.1 方向舵卡死飞机配平
完好飞机巡航段航程求解时,飞行参数基于纵向配平求得. 方向舵卡死飞机存在纵横向气动耦合,巡航飞行时的配平方法如下[5].


选择序列二次规划方法求解该优化问题,J的收敛阈值取10-7,此方法已在方向舵卡死飞机配平中得到应用[5]. 文献[9]配平F-16 等飞机时取c1=1、c2=c3=100、c4=c5=c6=10,并指出该权重常量对配平解的影响可以忽略,本文权重常量参照该文献选取.
2.2 动力学模型
飞机的平移和转动通过非线性微分方程组描述,可用于配平代价函数中状态量变化率的计算,具体形式如下

2.3 方向舵卡死飞机气动模型
方向舵卡死会引起飞机纵横向气动耦合,对飞机配平时,需考虑攻角、侧滑角和舵偏角产生的气动力和力矩. 此时气动力和力矩系数计算如下
2.4 巡航航程计算
飞机巡航时质量逐渐减小,维持稳态飞行需减小升力,可通过减小速度、增大高度和减小攻角三种方法实现. 等高度等速度飞行时,方向舵卡死飞机巡航航程计算流程如图3. 首先输入巡航高度、速度、方向舵卡死角、发动机参数及巡航过程中飞机气动、质量等数据,设定燃油质量消耗步长,基于巡航可用燃油质量和燃油步长将巡航段分为n个飞行航段.然后基于发动机数据和由输入数据得到的各航段飞机参数,按照航段编号依次对飞机配平,若出现无法配平航段,则计算停止,飞机在给定巡航状态下的航程不存在;若所有航段中飞机均可配平,则基于配平数据求解各航段航程. 最后对n个航段航程求和,得到飞机巡航航程.
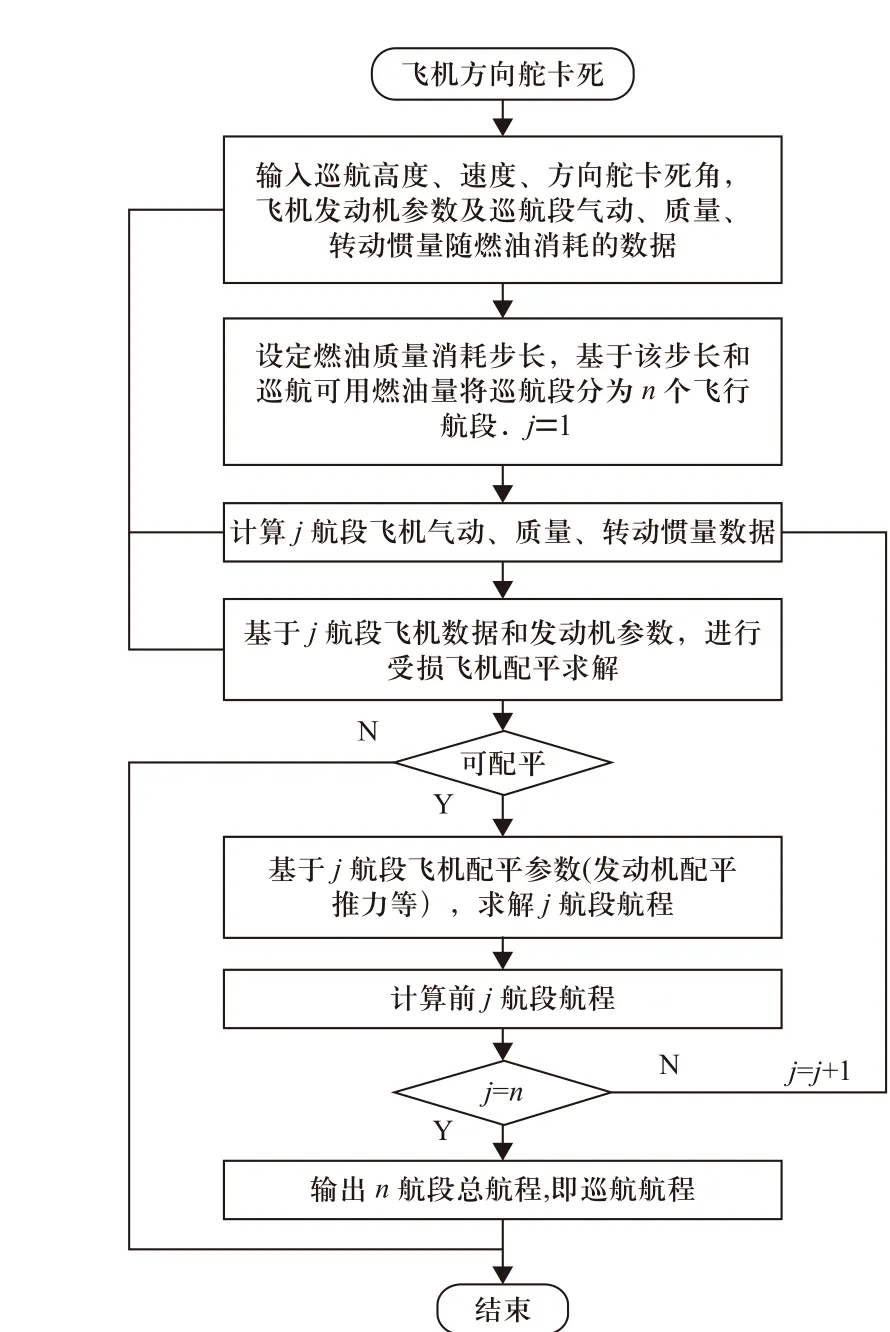
图3 方向舵卡死飞机巡航航程计算流程Fig. 3 Cruise range calculation process of aircraft with rudder jam

3 仿真算例
3.1 目标飞机参数
选择美国里尔喷气公司研制的Learjet 24 飞机进行计算,该机型装载两台GE CJ610-6 涡轮喷气发动机,其推力和SFC 数据见文献[10]. 不同高度和速度下的飞机气动参数由CFD 仿真得到,全机面网格如图4 所示. 雷诺数Re为8.6×106时,CFD 与风洞实验[11]所得升力系数随攻角变化结果如图5,二者数值接近且升力线斜率差异小于5%.

图4 Learjet 24 飞机面网格Fig. 4 Surface mesh of Learjet 24 aircraft

图5 Re=8.6×106 时升力系数对照Fig. 5 Lift coefficient comparison with Re=8.6×106
采用等高度等速度方式巡航,预留下降和着陆段燃油. 受损飞机巡航始末状态的惯性参数如表1 所示,表中数据参照同类机型Learjet 25 飞机选取[12].
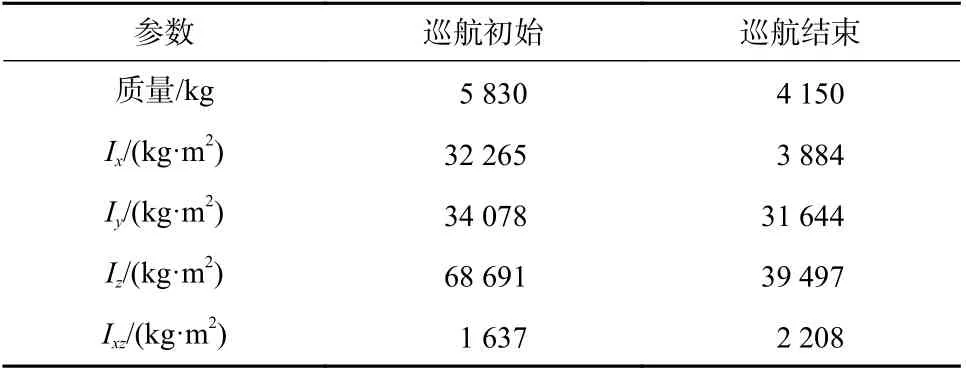
表1 受损飞机巡航惯性参数Tab. 1 Inertia parameters of damaged aircraft during cruise process
Learjet 24 飞机最大飞行马赫数为0.81[10],飞行时需满足一定约束,如表2 所示.

表2 Learjet 24 飞行约束条件Tab. 2 Flight constraints of Learjet 24
3.2 方向舵卡死飞机配平结果
飞机在5 km 巡航飞行时,不同方向舵卡死角下的配平参数如图6 所示,计算时取表1 中的巡航初始数据. 可以发现,方向舵卡死对配平攻角影响很小,对配平侧滑角影响很大,这是因为方向舵主要影响飞机横侧方向的气动参数. 此外,方向舵卡死增大了飞机配平阻力系数,减小了平飞马赫数范围,阻力增量主要由配平侧滑角和配平操纵面偏角引起.
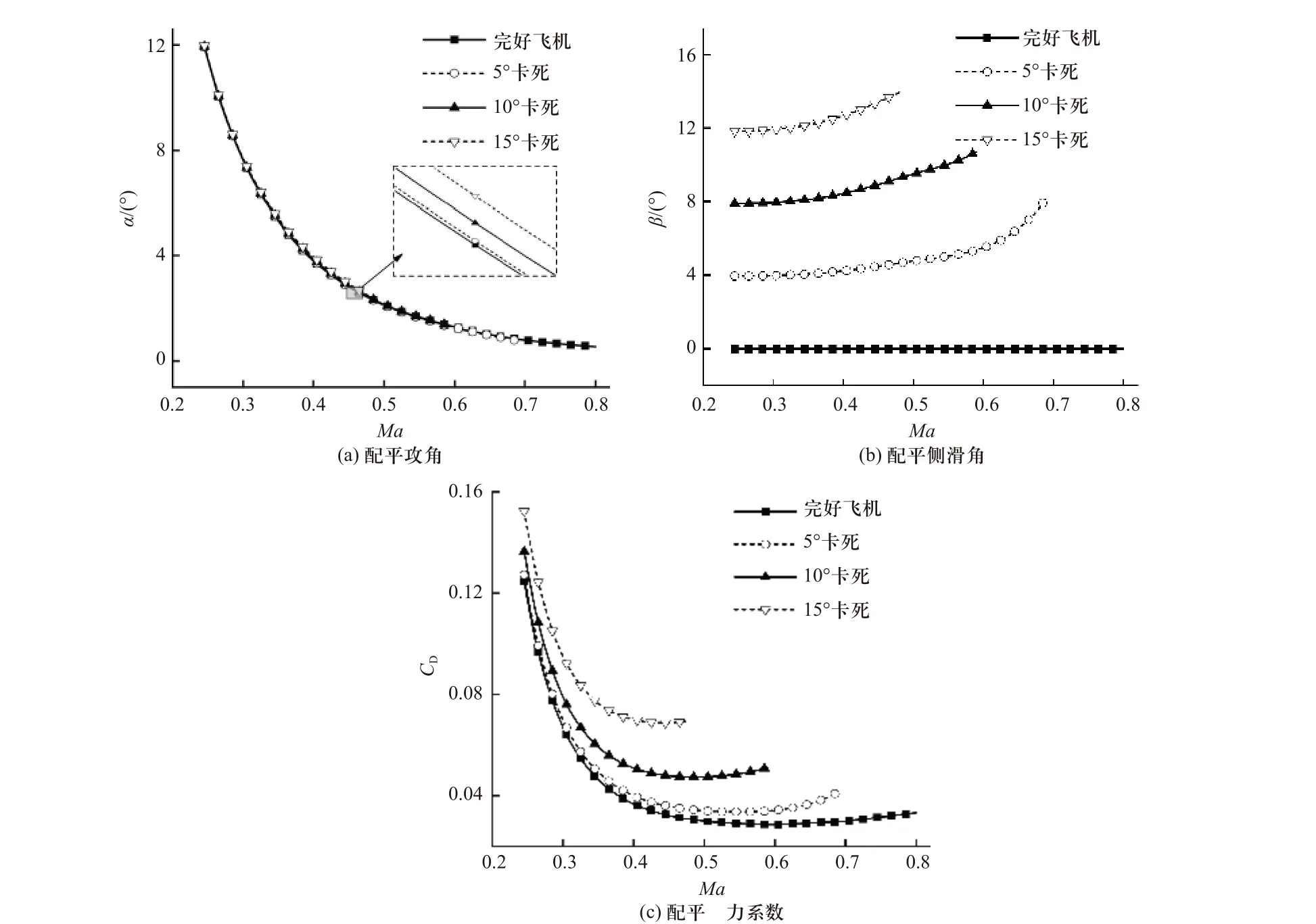
图6 不同方向舵卡死角下飞机配平参数Fig. 6 Trimmed parameters at different rudder jam angles
3.3 任务放弃判定结果
首先分析配平权重对巡航航程影响:设置巡航参数为0.3Ma和5 km,卡死角取5°,分别将6 个权重上下浮动10 以内整数倍,随机选取100 种权重组合,基于表1 中巡航参数求解巡航航程. 对比航程结果发现,权重变化对航程影响远小于0.1%,认为权重影响可忽略. 未受损Learjet 24 飞机在不同高度和马赫数下的巡航航程如图7 所示,计算时马赫数范围是0.1~0.8,步长为0.005. 随高度增加,飞机最大巡航航程Rcmax及相应马赫数Maopt均增大,与文献[7]趋势一致. 此外,Learjet 24 飞机设计最大航程为2 414 km,机载最大可用燃油2 534.6 kg,由此求得飞行剖面平均比航程(specific range, SR)为0.952 km/kg;图7中飞机10 km 最大巡航航程对应的SR 为1.126 km/kg,与上述平均SR 相比数值略大,符合飞行事实,认为航程结果可信.
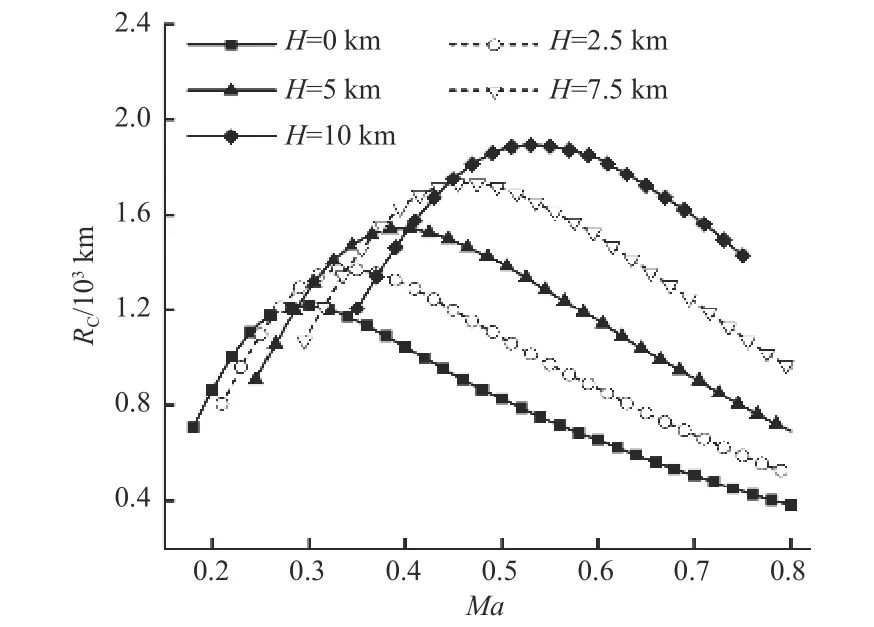
图7 未受损飞机巡航航程Fig. 7 Cruise ranges of undamaged aircraft
飞机在5 km 时的巡航航程如图8 所示. 可以发现,方向舵卡死会减小巡航航程,航程减小量随卡死角的增大而增加. 此外,方向舵卡死会减小Maopt,4种情况下Maopt分别为0.400、0.385、0.355 和0.325.卡死角为5°、10°和15°时,最大巡航航程分别减小了8.30%、26.64%和43.89%;若受损飞机仍保持完好飞机的Maopt飞行,则航程分别减小8.54%、29.10%和49.29%,因此以Maopt等高度巡航飞机遭受方向舵卡死后,适当减速可增大剩余巡航航程.

图8 H=5 km 时飞机巡航航程Fig. 8 Cruise ranges at 5 km height
不同巡航高度下,方向舵卡死飞机的任务放弃杀伤判定结果如表3 所示. 计算时,飞机以受损前的Maopt巡航,航程阈值设置为各高度下未受损飞机Rcmax的85%. 当方向舵5°卡死时,不同高度下飞机巡航航程均大于航程阈值,飞机不会因航程不足而放弃任务. 随着卡死角的增大,飞机巡航航程逐渐减小以至于不能满足任务需求,需放弃执行任务,即飞机遭遇任务放弃杀伤. 当卡死角和飞行高度均较大时,求解巡航航程时出现了无法配平的航段,飞机无法在此状态下巡航,不属于本文研究范畴.

表3 任务放弃杀伤结果Tab. 3 Results of the mission abort kill
4 结 论
本文针对方向舵卡死但仍具有继续执行任务能力的飞机,提出了基于航程的任务放弃杀伤判定方法,论述了考虑纵横向气动耦合的方向舵卡死飞机巡航航程计算过程. 通过仿真验证了方法可行性,得出了以下结论:
① 方向舵卡死增加了飞机配平阻力,减小了巡航航程和最大航程马赫数. 以最大航程马赫数等高度巡航飞机遭受方向舵卡死后,适当减速可增大巡航航程.
②小卡死角对应的航程损失相对较小,飞机剩余航程能够满足任务需求. 大卡死角产生较大航程损失,会导致飞机因航程不足而放弃任务,算例中15°卡死角下飞机巡航航程损失了接近50%.
本文仅从航程角度出发,对方向舵卡死飞机的任务放弃杀伤进行判定. 今后的研究中,可以在判定时考虑更多影响因素,如飞机机动性、隐身和着陆性能等.
猜你喜欢
学习周报·教与学(2020年25期)2020-10-21
科教新报(2020年26期)2020-07-31
优雅(2020年6期)2020-07-23
环球慈善(2019年6期)2019-09-25
数学学习与研究(2019年5期)2019-05-08
理科考试研究·高中(2017年7期)2017-11-04
发明与创新·大科技(2017年1期)2017-01-14
考试周刊(2015年12期)2015-09-10