中国大蒜机械化生产现状与发展思路探讨*
2022-04-24 12:55魏宏玲王小瑜陈进熹崔荣江
中国农机化学报 2022年4期
魏宏玲,王小瑜,陈进熹,崔荣江
(1. 杭州职业技术学院,杭州市,310018; 2. 山东省农业机械科学研究院,济南市,250100)
0 引言
大蒜是中国主要特色经济作物之一,种植面积、产量、出口量以及出口额均居世界首位,为农民增收、国家创汇做出积极贡献,大蒜产业极具发展潜力[1-2]。
相对于大蒜种植业的发展,大蒜机械化生产条件相对滞后。近年来,受其生产工序繁杂、效率低、农村劳动力结构变化等影响,大蒜生产环节人工费用已占到生产总成本的50%~60%,并且所占比重越来越大,使得大蒜种植综合效益降低,种植风险增大,缺乏适合中国大蒜主产区的大蒜生产装备已成为制约中国大蒜生产的瓶颈。研发与之配套的机械化生产装备将成为必然趋势,对保障中国大蒜产业健康稳定发展具有重要意义。
大蒜生产包括耕整地、蒜头破瓣分级、播种、田间管理、蒜苔收获和蒜头收获等环节,涉及耕整地机械、蒜头破瓣分级设备、大蒜播种机、田间管理设备、蒜苔收获机和蒜头收获机等设备,其中仅耕整地机械和田间管理设备可采传统机具。近年来,在各研发单位、企业及各级政府的努力下,国内大蒜机械化生产技术得到快速发展,配套生产装备逐步完善,除蒜苔收获环节缺失机械外,其生产基本能够实现全程机械化,中国大蒜机械化生产装备实现了从无到有。本文重点梳理了近年大蒜破瓣分级设备、大蒜播种机和大蒜收获机的技术发展情况,指出大蒜机械化发展中存在的问题,并对发展思路进行了探讨。
1 大蒜破瓣分级设备
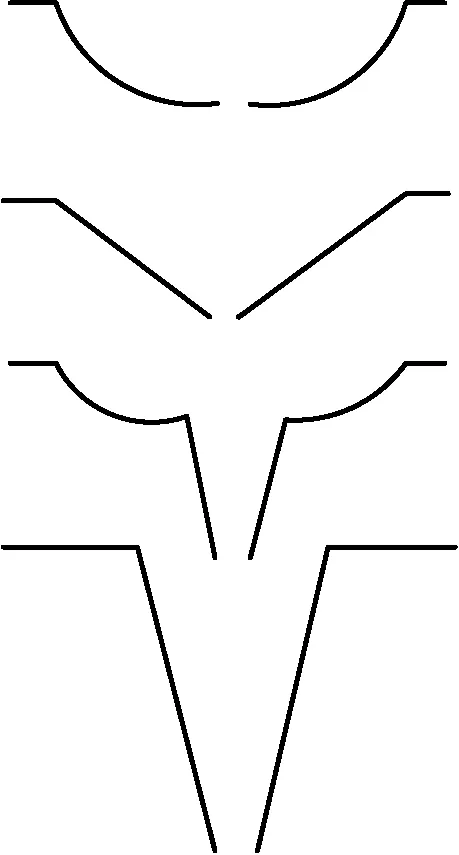
人工破瓣分级效率低、劳动强度大,提前破瓣种子养分流失、易损坏,另外,大蒜播种机播种需要精确分级的蒜瓣,蒜头破瓣分选装备在大蒜机械化生产环节中不可缺少。大蒜破瓣设备根据硅胶层数分为双层和单层,国外破瓣分选设备多通过硅胶板与输送带之间上下碰撞实现破瓣,相较双层硅胶瓣,单层硅胶伤蒜较为严重。蒜瓣分级装置主要有滚筒筛和直线震动分级筛[3],滚筒网格形状有方形和长条形等,如图1所示。相较直线震动分级筛,滚筒式网格筛虽然结构更为简单,但效率低,蒜瓣易滞留在筛网底部,导致分级不均匀,适用于小户。目前国内比较有代表性的大蒜破瓣分级机结构如图2所示,主要包括蒜头提升装置、破瓣装置、蒜瓣提升装置和蒜瓣分级装置四部分,为减少破瓣损伤,破瓣装置采用上下锥型硅胶破瓣盘结构,软揉搓方式破瓣,破瓣间隙通过压力弹簧自适应调整;蒜瓣分级装置采用自激振动方式,并根据大蒜播种机排种器要求,蒜瓣分级直径标准设定为2.5、2、1.6 cm三种型号。机器具有损伤率低、效率高、分级精确等优点。国内外破瓣分选设备技术参数对比,如表1所示。


(a) 滚筒式方空网格筛 (b) 滚筒式长条空网格筛图1 滚筒式网格筛Fig. 1 Cylindrical mesh screen
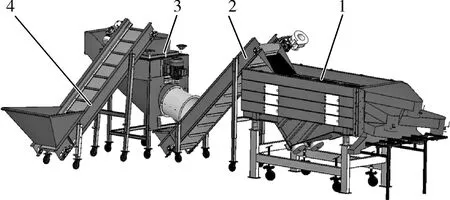
图2 国内破瓣分选设备结构示意图Fig. 2 Schematic diagram of garlic clove sorting equipment1.蒜瓣分级装置 2.蒜瓣提升装置 3.破瓣装置 4.蒜头提升装置

表1 破瓣分选设备技术参数对比Tab. 1 Comparison of technical parameters of flap-breaking separation equipment
2 大蒜播种机
大蒜播种机是实现大蒜全程机械化生产的重要组成部分,缺少播种装备易造成种植模式不规范,进而阻碍大蒜收获装备推广应用。因此,要提高大蒜生产机械化水平,形成大蒜标准化种植,实现大蒜生产全程机械化,首要环节是开发高效适用的大蒜播种装备。目前大蒜播种装备主要有正芽型和平放型两种。
2.1 正芽型大蒜播种机
2.1.1 正芽播种机关键技术
正芽栽种是我国大蒜传统种植农艺,可以提高蒜头产量和品质[4-7]。实现大蒜正芽播种的核心是大蒜鳞芽方向控制装置,即通过控制装置新的结构设计、新技术原理应用,开发大蒜鳞芽方向控制技术与装备,实现大蒜鳞芽的精确控制保证正芽播种,符合大蒜高产优质农艺要求,是目前的研究热点。机械控制和光电控制是目前大蒜鳞芽方向控制的两种方式。机械控制:李华峰[8]提出根据大蒜鳞芽芽部和根部受浮力不同,发明了一种利用水进行大蒜鳞芽方向控制的方法,如图3(a)所示,研究表明,该方法适用于形态规则、重心靠下的大蒜鳞芽,但作为播种机的一个环节时,会出现湿鳞芽造成下栽鸭嘴黏土的问题。荐世春等[9]设计了一种锥形螺旋导种管定向装置,如图3(b)所示;赵纯军[10]应用螺旋弹簧技术发明了一种大蒜播种机,该技术适用于形态规则、重心靠下的大蒜鳞芽,由于大蒜鳞芽在螺旋弹簧中的碰撞次数较多,控制时间延迟明显,致使整机工作效率较低。韩国KSF株式会社[11]提出利用大蒜鳞芽芽尖细长特征进行大蒜鳞芽方向控制的技术,如图3(c)所示,针对芽尖长度≥10 mm的大蒜鳞芽,可实现90%以上的正芽。崇俊等[12]根据大蒜鳞芽重心靠下特性,发明了多层锥碗进行大蒜鳞芽方向控制的技术,如图3(d)所示,针对商河当地薹蒜适应性较好,由于采用多层控制方式,工作效率不高。耿爱军等[13]提出利用种盒式进行大蒜播种的方法,但还无法实现自动化。除机械控制,杨清明[14]、郭英芳[15]、高驰[16]、Lei P[17]、Li Y[18]、侯加林[19]、李玉华[20]等先后提出利用图像处理技术、模式识别技术、光电识别技术和红外线技术进行大蒜鳞芽方向控制,目前光电式鳞芽方向控制方式仍处于实验室阶段。


(a) 水浮种方式 (b) 螺旋弹簧方式

(c) 鳞芽芽尖方式 (d) 多层锥碗方式图3 大蒜鳞芽方向控制技术Fig. 3 Garlic scale bud direction control technology
2.1.2 典型正芽播种机
目前比较有代表性的大蒜正芽型大蒜精量播种机主要有2BUX-11型大蒜播种机、QH型大蒜播种机和 HADA大蒜播种机。
2BUX-11型大蒜播种机结构如图4所示,核心部件为链勺式单粒取种装置[5]、鳞芽方向控制器(换向器)和直立下栽装置[6-7],其中链勺式单粒取种装置工作过程包括冲种、倾斜清种、水平清种和逐个排种四个环节,取种勺为双槽式,并根据蒜瓣大小分布,分大中小3个型号;方向控制器为锥形,大蒜鳞芽芽尖朝下进入控制器时,芽尖漏出控制器,栽种器压紧漏出方向控制器的蒜瓣芽尖,随着方向控制器活动部件打开一定角度,芽尖承受不住自身重量,发生塑性变形,蒜瓣翻转180°,芽尖朝上直立进入栽种器,实现大蒜鳞芽方向控制,碰撞片采用圆弧形设计,可实现芽尖长度大于5 mm的蒜瓣正芽;将谷物联合收获机扶禾器原理作为大蒜播种机栽植系统设计基础,中间轴随驱动圆盘同时旋转的直立下栽机构,可实现10行以上鸭嘴同时直立下栽作业,机构运行稳定。机器具有正芽率高、大蒜品种适应性强等优点。

图4 2BUX-11型大蒜播种机结构图Fig. 4 Structure diagram of 2BUX-11 garlic seeder1.驱动总成 2.机架 3.链勺式单粒取种装置 4.整地器 5.直立下栽装置 6.鳞芽方向控制器
QH型自走式大蒜播种机结构如图5所示,采用转勺式排种器取种,多层锥碗技术进行鳞芽方向控制,曲柄五杆机构进行直立下栽,该机针对当地薹蒜品种播种效果较好,但对形状变化较大的杂交蒜品种正芽效果不稳定。

图5 QH型大蒜播种机Fig. 5 QH garlic seeder
韩国HADA大蒜播种机结构如图6所示,采用转勺式排种器取种,利用鳞芽芽尖进行鳞芽方向控制,行星轮机构进行直立下栽,由于换向器采用平口设计方式,适合芽尖长度大于1 cm的大蒜鳞芽,对于芽尖短且弯的杂交蒜品种正芽效果不稳定。3种正芽型播种机技术参数对比,如表2所示。

图6 HADA大蒜播种机Fig. 6 HADA garlic seeder

表2 正芽型播种机技术参数对比Tab. 2 Comparison of technical parameters of normal bud seeder
2.2 平放型大蒜播种机
平放播种方式在欧美国家较为常用,随着国内大蒜加工产业深入,如:蒜米、蒜片和蒜油等,对蒜头形状要求降低。另外,相对正芽型播种机,平放型播种机结构简单,价格相对较低,随着国内链勺式大蒜排种器技术的成熟,平放型大蒜播种机在中国逐步有了一定市场空间(大蒜平放播种影响蒜头形状)。目前比较有代表性的平放型播种机主要有2BD-7平放型大蒜播种机、自走式平放型大蒜播种机和两种国外平放型大蒜播种机。
2BD-7平放型大蒜播种机结构如图7所示,排种器为链勺式开沟器为船型,保证蒜瓣落地瞬间地面为平面,实现蒜瓣均匀横躺姿态播种,排种器排种环节靠近开沟器,距离地面较近,保证蒜瓣落地回弹小,实现均匀播种。机器具有结构简单、播种均匀等优点。图8为自走式平放大蒜播种机,采用一级链勺式排种器,结构简单、价格便宜,但一级简易取种勺漏播率较高,适用范围有限。另外,蒜瓣落入双圆盘开沟器形成的三角形沟内,种植姿态控制困难,种植均匀性较差。转勺式排种器是国外大蒜播种机的主要排种方式,如图9(a)所示,圆弧型取种勺均布在转盘一侧,当取种勺转到取种位置时,在旋转挡块作用下打开取种,并在扭转弹簧作用下将蒜种夹紧,多余蒜瓣被毛刷刷掉,掉回种箱。2015年,团队引进该排种器,试验显示漏播率高达15%,不符合国内精量播种要求。图9(b)为国外气吸式平放播种机,播种效率较高,需要将蒜瓣分为4级,因价格较高没有在国内得到推广应用。此外,该播种机大小行种植,种植均匀性不高,小行距种子极易混在一起。4种平放型播种设备技术参数对比如表3所示。

图7 2BD-7平放型大蒜播种机Fig. 7 2BD-7 flat garlic seeder1.液压油缸 2排种器 3.筑畦器 4.船型开沟器 5.驱动总成

图8 自走式平放型大蒜播种机Fig. 8 Self-propelled flat garlic seeder

(a) 转勺式大蒜平放型播种机

(b) 气吸式大蒜平放型播种机图9 国外大蒜平放型播种机Fig. 9 Foreign flat garlic seeder
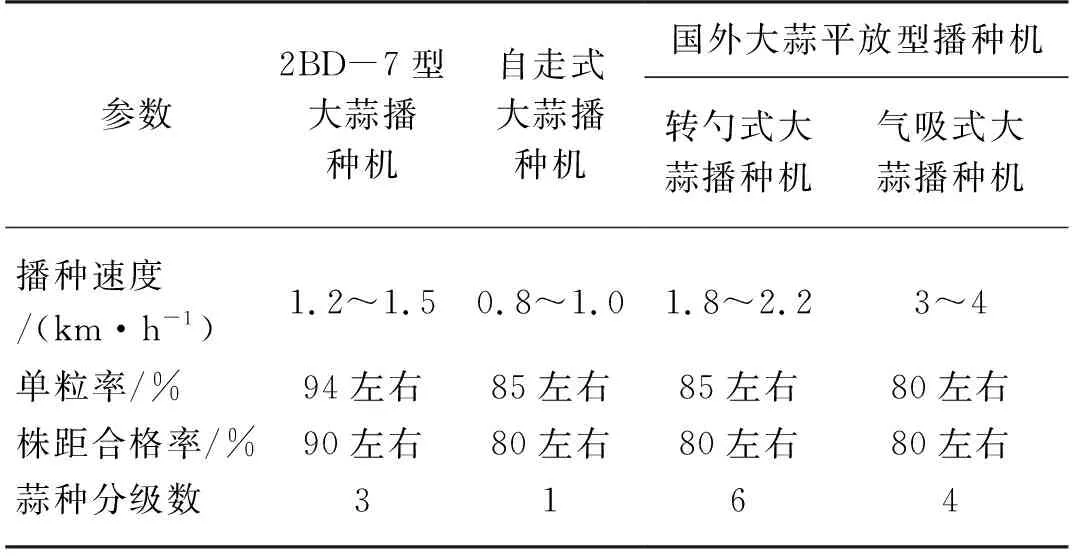
表3 平放型播种机技术参数对比Tab. 3 Comparison of technical parameters of horizontal seeder
3 大蒜收获机
收获是大蒜生产中劳动强度、用工量最大环节。国内由于长期缺少标准化生产技术指导和生产装备,大蒜种植模式多样,种植行距、株距杂乱。面对复杂模式,国内先后出现多种大蒜收获机型,按大类分为分段收获机和联合收获机两种[21-29]。
3.1 大蒜分段收获机
大蒜分段收获指先挖掘,再由机器或人工进行整理收集的收获方式,主要有简易挖掘式、带清土轮式和铺放式。
简易挖掘式收获机,如图10所示,主要有自走式、手扶拖拉机前置、轮式拖拉机后置三种形式,挖掘收获仍需要人逐颗清理和收集,特别地块湿度较大时,蒜头极易产生泥块,给后期处理带来极大不便。

(a) 自走式

(b) 手扶前置式

(c) 后置式图10 简易挖掘式收获机Fig. 10 Excavating garlic harvester
为解决挖掘收获清土问题,国内先后出现小型和大型带有清土轮的前置挖掘收获机,如图11(a)和图11(b)所示,挖掘出的带土蒜头经多级清土轮传送至收获机后方,实现蒜土分离,该机器对沙壤土收获效果较好,对黏度较大的壤土还不能保证收获效果。另外,不包胶的清土轮会对蒜头造成一定损伤,机具抖动还会对拖拉机造成一定损伤。铺放式分段收获机,如美国的GW2400型大蒜割晒机,如图12(a)所示,该机主要结构为箭铲—拨轮—分离输送链杆组合,由拖拉机牵引,将大蒜与土壤的混合体经初级和次级输送链传送到传送链向后输送,同时大蒜在链上振动,将土壤抖落,该方式适合大型农田粗放式收获,不适合国内。山东省农业机械科学研究院针对我国大蒜产区4行一畦种植模式,研制了夹持铺放式大蒜分段收获机,如图12(b)所示,一次加持收获4行,作业时分禾器将倒伏交织大蒜秸秆扶起并按相应种植行分开,使之有序进入喂入拨轮以便夹持装置顺利夹持,同时位于拨轮下方的挖掘铲从底部将大蒜挖松,夹持装置将大蒜植株向后输送,进入横向夹持铺放链铺放至地面。该机器使用过程中极易被杂草和薄膜堵塞,对行较为困难。3类大蒜分段收获机优缺点对比如表4所示。

(a) 小型前置

(b) 大型前置图11 带清土轮式大蒜收获机Fig. 11 Excavating garlic harvester

表4 3类大蒜分段收获机优缺点对比Tab. 4 Comparison of advantages and disadvantages of three kinds of garlic section harvesters
3.2 大蒜联合收获机
大蒜联合收获指一次实现挖掘、切杆(打捆)、清土和收集的收获方式,主要有切秆挖拔组合式、切秆挖掘式和打捆式。
切秆挖拔组合式大蒜联合收获机可实现一次实现大蒜的挖掘、夹持输送、切杆和收集作业,作业效率高,损伤率低,蒜头粘土少后续加工处理方便,是大蒜理想收获方式。切秆挖拔组合式大蒜联合收获机在欧美国家技术已相对成熟,如图13(a)所示的ERMR切茎收获机。国内切秆式大蒜联合收获机的目前有大、小两种型号,如图13(b)和图13(c)所示。目前制约大蒜联合收获机推广应用的主要原因是传统小行距种植模式与机械联合收获大行距要求不匹配,对行收获困难。另外,薄膜和杂草缠绕极易造成切秆式大蒜联合收获机故障。

(c) 国内小型切秆挖拔组合式联合收获机图13 切秆挖拔组合式大蒜联合收获机Fig. 13 Combined harvester for cutting stalk, digging and pulling garlic
针对我国大蒜产区小行距种植无法对行收获问题,山东省农业机械科学研究院研制了切茎挖掘式大蒜联合收获机,如图14所示,拨禾轮将大蒜秸秆拨至切割器切断,进入螺旋铺放装置成条铺放,挖掘装置从底部将蒜头挖出,通过链筛输送振动实现蒜土分离,然后进入横向输送器,经升运器至刷式清洁装置,清理后输送至蒜头收集箱,完成作业。该机器适用于蒜秆直立状态较好的情况,倒伏蒜收获效果不好,地块湿度较大时,泥块现象明显。针对我国部分大蒜大行距种植模式,研制了打捆式大蒜联合收获机,如图15所示,作业时,蒜秧经扶禾器导入V带夹持传送装置,同时挖掘铲入土将大蒜根部土壤挖松,蒜秧经夹持传送装置传送至打捆装置,在夹持传送过程中,位于夹持传送装置下方的转动刷对大蒜根部进行拍击清土,当打捆装置中蒜秧收集到一定数量时,蒜秧会触发打捆开关,打结器用绳线对蒜秧进行捆绑,拨叉将蒜捆拨到横向输送带上,输送到一侧。该机器稳定性较好,但一次只能收获一行,效率不高,需要拖拉机牵引,收获方式不灵活。3类大蒜联合收获机优缺点对比如表5所示。

图14 切茎挖掘式大蒜联合收获机结构示意图Fig. 14 Schematic diagram of stem cutting and digging garlic combine harvester1.机架 2.蒜箱 3.升运器 4.切割器 5.挖掘装置 6.液压底盘

图15 打捆式大蒜联合收获机整机结构图Fig. 15 Overall structure of baling garlic combine harvester1.输送装置 2.打结装置 3.放绳器 4.夹持传送机构 5.控制箱 6.扶禾器 7.挖掘机构 8.机架
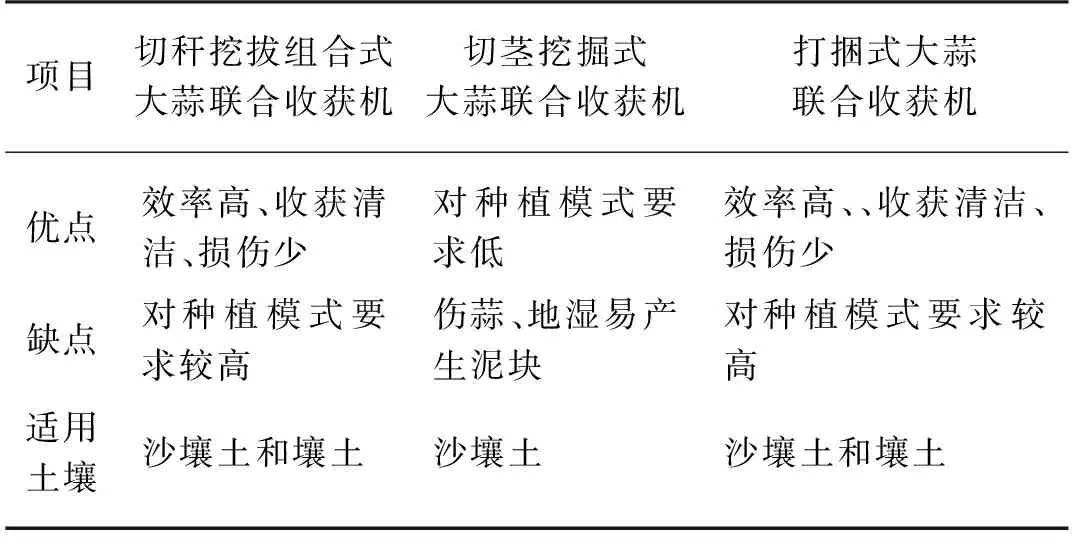
表5 3类大蒜联合收获机优缺点对比Tab. 5 Comparison of advantages and disadvantages of three kinds of garlic combined harvesters
4 存在问题与发展思路
4.1 存在问题
1) 传统种植模式与机械化生产需求模式存在矛盾。国内大蒜种植行距一般为12~20 cm,小行距高密度种植给大蒜联合对行收获带来极大困难,也是目前制约大蒜联合收获机推广应用的主要原因。另外,由于长期缺少标准化生产技术指导和生产装备,国内大蒜种植模式多样,种植行距、株距杂乱,给大蒜机械的生产制造带来很多困难。
2) 大蒜机械生产标准不统一。随着大蒜生产装备种类和厂家的增多,出现机具标准不匹配问题,如大蒜破瓣分级标准与机械播种需要不匹配,播种机行距设计与机械收获需求不匹配,不同企业机械生产标准不统一等。
3) 大蒜机械化生产技术有待进一步提高。正芽播种和联合收获是大蒜首选生产方式,其相关技术仍有提升空间。
第一,正芽播种机正芽率有待进一步提高。目前大蒜播种机正芽率低主要有两个原因:(1)大蒜鳞芽缺少稳定物理特征。中国大蒜品种资源丰富,约70多个,比较有代表性的品种为苍山大蒜和金乡杂交大蒜,如图16所示,苍山大蒜鳞芽芽尖直长、形态规则、约90%的大蒜鳞芽重心靠下;金乡杂交大蒜鳞芽芽尖弯短,形态相对复杂、约72%的大蒜鳞芽重心靠下;另外,蒜头采用机器揉搓方式分瓣时,还会造成20%~35%的大蒜鳞芽脱皮问题,进一步增加大蒜鳞芽物理特征的复杂性。(2)控制装置使用种子物理特征单一。依据种子自身物理特性设计控制装置是目前常用方法,例如玉米、超级稻、南瓜等作物定向控制装置的研究,现有机械式大蒜鳞芽方向控制装置设计主要应用大蒜鳞芽芽尖细长特征或重心靠下特征,同时使用两种或两种以上种子物理特征的控制装置尚未见报道。
第二,大蒜联合收获机在适应性和稳定性方面还需做进一步提高。(1)国内大蒜种植行距小,加上部分倒伏,机器对行行走和扶禾效果不理想。(2)机器连续工作能力较差,秸秆、杂草和薄膜造成堵塞,故障率较高。(3)机器普遍缺少蒜头清土装置,土地湿度较大时易出现泥块现象,给后期清理带来麻烦。

(a) 苍山大蒜 (b) 金乡杂交大蒜 (c) 脱皮大蒜图16 不同大蒜鳞芽Fig. 16 Different garlic scale buds
4.2 发展思路探讨
1) 开展宜机化大蒜生产模式研究。在现有机具基础上,调整传统种植模式,开展宜机化大蒜生产模式研究。团队对大小行模式做了初步探索,研究结果表明大小行种植模式产量略有增加[24],小范围联合收获机试验表明,大小行模式极易对行(小行距120 mm,大行距240 mm),此外大蒜正芽播种机也能实现该种植模式,大小行模式符合大蒜机械化生产模式要求。对主要大蒜品种、种植区域开展宜机化大蒜生产模式研究,在不减少产量和降低品质的条件下,使其更便于机械化播种和收获,是目前解决大蒜机械化生产问题的关键。目前也初步具备了开展试验研究的机械装备条件。
2) 对关键技术问题继续攻关。(1)正芽播种方面可通过串联使用大蒜多种物理特征进行大蒜鳞芽方向控制,一套控制装置使用大蒜鳞芽多种不同物理特征进行大蒜鳞芽方向控制,从原理上增加控制装置的可靠性和其对大蒜品种的适应性。另外,图像识别技术在工业领域已相对成熟,可尝试将其应用到大蒜鳞芽方向控制环节。(2)大蒜联合收获技术国外已成熟,可在其基础上针对国内种植模式做适用性改进。多轮的试验表明,行距小于220 mm,对行收获结构设计和机器实际对行操作都会很困难,如加持带轮的布置,小行距还会造成加持切割结构因空间问题强度不够。因此,国内大蒜收获技术重点因该放在扶禾结构、防堵结构、松土结构、加持结构适应性改进方面。
3) 政行企三方合作。(1)大蒜相对主要粮食作物属于小众农产品,大型农机企业仍未有涉及,目前主要是少数高校和科研院所及部分小型农机企业在做,其相关生产机械的研发难度不低,需要政府在科研经费和农机补贴政策方面给与支持。(2)国内大蒜种植仍是小户为主,作为主要经济作物,农户直接接受新机具的意愿较低,需要企业和各级农机推广部门合作,进行广泛试验示范。(3)行业农艺专家和农机专家合作,共同制定宜机化大蒜生产标准,给实际生产和制造提供指导,共同促进中国大蒜产业的发展。
4) 加强知识产权的保护力度。简易农机具极易被模仿,如大蒜播种机链勺式排种器,已被广泛模仿应用到小型自走式播种机,给发明厂家带来极大困扰,仿造严重影响着创新发展。
5 结论
1) 本文梳理了近年国内外大蒜生产机械研究现状,其中蒜头破瓣分级设备已被广泛应用,技术已相对成熟;播种设备正逐步被蒜农接受,技术还有提升空间;收获装备受制于种植模式的不规范,实际应用效果不佳,特别联合收获机械。
2) 中国大蒜机械生产现阶段主要矛盾为传统种植模式与机械化生产需求模式不匹配,如:传统小行距种植模式与机械联合收获大行距要求不匹配,大蒜破瓣分级标准与播种机排种要求标准不匹配等。
3) 针对存在问题,提出开展宜机化大蒜生产模式研究,有效衔接大蒜生产各环节机具,同时对正芽播种和联合收获关键技术继续公关,通过政行企三方合作,共同促进中国大蒜产业发展的思路。
猜你喜欢
农业工程学报(2022年4期)2022-04-24
农民致富之友(2019年33期)2019-12-20
小学阅读指南·低年级版(2019年6期)2019-09-09
小溪流(故事作文)(2018年6期)2018-08-06
创新作文(5-6年级)(2017年9期)2018-07-06
创新作文(5-6年级)(2017年8期)2018-07-06
江河文学(2017年3期)2017-11-13
课堂内外(小学版)(2016年12期)2017-01-11
农村百事通(2016年8期)2016-05-14
农家顾问(2014年11期)2014-12-01