基于WiFi通信的玉米除草机器人结构设计与试验*
2022-04-24 12:55刁智华闫娇楠张萌贺振东娄泰山吴青娥
中国农机化学报 2022年4期
刁智华,闫娇楠,张萌,贺振东,娄泰山,吴青娥
(郑州轻工业大学电气信息工程学院,郑州市,450002)
0 引言
在农业的发展中,对于从事农业的工作者来说,农田中的杂草是影响农业生产的首要敌人,它们对庄稼危害极大,因为杂草要与庄稼争夺养分、阳光、空气和水。杂草越多,农作物的产量会越小,随之而来的是经济效益会受到很大影响,因此,除杂草成为农业工作者在作业时的重中之重。目前,一般采用化学除草和机械除草两种方式,但大面积喷洒除草剂对环境和人员造成的伤害极大,而机械除草精准化、自动化程度不高,若根部清除不净会造成杂草二次重生,且两种方式智能化水平有待提高,因此绿色除草工具智能除草机器人应运而生。
针对智能除草装置国内外已经进行了一些研究,国内贾洪雷等[1]设计了一种在中耕期玉米田间使用的避苗除草装置,但由于梳齿需进入土壤工作,需要降低该装置的作业阻力,还要克服梳齿间杂草缠绕、增加杂草的种类问题。陈振歆等[2]设计了弹齿式苗间除草装置,但除草效果不理想,存在伤苗率高等问题。齐龙等[3]研制了步进式水田中耕除草机,但步进式除草机的工作效率较低、劳动强度大。陈树人等[4]基于LabVIEW设计了八爪式株间机械除草装置的控制系统,但电磁吸合装置的吸合时间存在一定的延迟响应。张春龙等[5]研究了移动机器人平台,设计了三指手爪锄草机械手,锄草机械手的锄草率可达90%以上,但没有进行室内或者田间试验。胡炼等[6]研究了除草爪齿余摆运动原理的株间机械除草装置,机具前进速度的增加会导致伤苗率增大。芦新春等[7]设计了一种圆盘式行间中耕除草施肥机,能克服单项作业带来的不利影响。国外Choi等[8]研究了水田除草机器人的导航精度,但试验是在图像噪声很小的情况下进行的,还有提高的空间。Thijs等[9]提出了从图像层面、应用层面、现场层面对喷洒机器人评估,根据机器人做出的喷洒决定来分析杂草检测,能有效控制杂草,但喷洒系统的分辨率有待进一步提高。Kanagasingham等[10]为了实现自动除草机器人完全自主的杂草控制,开发了一种视觉作物行检测算法。Cordill等[11]通过使双齿载体接触土壤,避开玉米秸秆,非特异性地去除行内的杂草植物,但在杂草密度高的田地里,性能有所下降。
针对上述除草机器人在除草过程中出现的问题,本文从机器人机械臂末端出发,设计了一种机械+化学的除草结构和手动+自动的工作模式,基于ROS系统的ARM11主控板和STM32从控制板相互配合,驱动玉米除草机器人行走,控制机器人机械臂末端执行组件完成除草工作,并且在除草后的杂草部位精准喷射除草剂保证彻底清除杂草。上述方法为玉米除草机器人后续研究提供了有效参考。
1 玉米除草机器人结构设计
1.1 整机结构设计
玉米除草机器人整体结构如图1所示,包括小车主体、轮动装置、机械臂以及机械臂末端执行组件。玉米除草机器人主体上安装轮动装置,轮动装置由安装在小车内部的驱动器驱动运行。小车主体上安装有机械臂和机械臂末端执行组件,机械臂各关节处和末端执行组件处安装有电机,电机驱动和控制装置安装在小车主体内部。除草机器人主体前侧安装有视觉传感器,可采集和传输图像数据至小车主体内部的控制装置进行处理,小车内置有驱动装置、控制装置、化学除草装置、供电模块、通信模块、机械臂。

图1 除草机器人结构Fig. 1 Structure of the weeding robot1.视觉传感器 2.针型喷雾头 3.转台 4.锯齿圆形刀片 5.旋转电机Ⅱ 6.小臂 7.肘部舵机 8.大臂 9.肩座舵机 10.肩座 11.基座舵机 12.基座 13.小车主体 14.集草箱 15.车轮 16.压力传感器 17.除草剂瓶 18.旋转云台 19.旋转电机Ⅰ 20.WiFi路由器
除草机器人上的视觉传感器捕捉玉米和杂草图像信息,经过处理定位杂草位置,测量距离。步进电机驱动行驶轮使机器人到达指定位置。机械臂各关节电机控制肩部、大臂、小臂的上下移动,相互配合使除草机器人的末端执行组件到达杂草位置。末端执行组件完成除草的3个功能,旋转机芯盘的锯齿圆形刀片左右旋转,在机械臂的配合下完成除草工作;合金抓手在旋转机芯盘和机械臂的配合下将杂草放入集草箱;最后打开电磁阀针型喷雾头对杂草切割部位进行精准喷射。
1.2 关键部件设计
1.2.1 小车主体设计
在对除草机器人的设计中,优先设计小车主体部分。目前常用的小车分为两种,一种是履带式小车,一种是轮式小车。这两种小车作为除草机器人的主体架构都有较高的稳定性,能在复杂的地面环境下工作。其中,履带式小车的平稳性要优于轮式小车,但在除草的过程中容易嵌入杂物,易损坏,维修或者更换部件更复杂,因此,本设计优先采用轮式小车。车身部分包括底盘和车轮。
1) 底盘。对底盘的设计务必要保持刚性,不仅是为了要承载机器人上的电源部分、电路部分和末端执行组件部分,还要保证机器人在使用中不发生故障。由以上条件,设计了长为600 mm,宽为400 mm,厚为2 mm的底盘,并在底盘上设计出需要的孔径。
2) 车轮部分。车轮部分是小车的驱动核心,安装在底盘下方。车轮部分包括驱动电机和橡胶车轮,驱动电机安装在车轮上并与车轮连接,且驱动电机与控制装置相连接。除草机器人的工作环境复杂,在选用电机时优先考虑动力性能,对电机的转速要求不高,但是要能通过单片机输出的PWM波来进行控制转速。综合上述条件,选择了大扭力减速电机(额定电压12 V,50 r/min),额定功率30 W,并且最大扭力为91 kg,可以满足除草机器人的动力需求。
1.2.2 机械臂设计
如图1所示,除草机器人机械臂放置于小车顶部包括旋转云台、基座、肩部、肩关节、大臂、肘关节、小臂、腕关节[12-18],表1为机械臂的尺寸参数。旋转云台由旋转电机、金属圆形大轴承、转盘和配件构成,金属轴承连接旋转电机和转盘,可在旋转电机的驱动下顺时针逆时针旋转,金属大轴承可减小电机旋转造成的摩擦。基部与旋转云台固定在一起,起到承重和支撑的作用,基部、肩关节和肘关节处安装舵机控制肩部、大臂、小臂的移动,腕关节为一圆形轴承加旋转电机,旋转电机的输出轴连接圆形轴承,轴承可在电机的作用下旋转。

表1 机械臂尺寸参数Tab. 1 Mechanical arm size parameters mm
1.2.3 机械臂末端执行组件设计
除草机器人机械臂末端执行组件为人字形结构转盘,如图2所示,由锯齿圆形刀片、合金抓手、针型喷雾头组成。人字形结构转盘的厚度大约40 mm,通过螺钉与腕关节圆形轴承固定在一起,可以随圆形轴承的旋转而旋转。针型喷雾头通过连接杆与舵机连接,并用螺丝固定于人字形结构一端,化学除草装置由除草剂和电磁喷雾控制器组成,电磁喷雾控制器的输入管道连接除草剂瓶,输出管道连接机械臂末端执行组件的针型喷雾头。物理除草装置锯齿圆形刀片和合金抓手通过连接件也分别固定在人字形结构另外两端,锯齿圆形刀片采用40齿锰钢刀片,外围120 mm,对玉米地杂草轻松切割。合金抓手使用ROBOTIQ电动夹爪,手指开合最大距离为155 mm,能夹持最多5 kg负载。三端呈120°夹角分布。
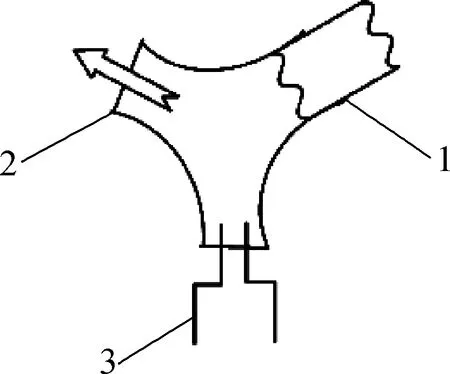
图2 机械臂末端执行组件Fig. 2 Terminal execution unit of the mechanical arm1.锯齿圆形刀片 2.针型喷雾头 3.合金抓手
末端执行组件通过步进电机调整与杂草、地面的位置。电机与末端执行组件之间是螺杆传动,机械传动比
式中:v1——电机的转速,r/min;
v2——螺杆的转速,r/min。
一个电源脉冲,对应电机前进一步,被驱动的末端执行组件平移的距离叫步距,螺杆转动一周末端执行组件的平移距离叫螺距。假如电机转一周需要6p个脉冲,那么末端执行组件平移的距离就是一个步距,计算公式为
式中:l——步距,mm;
d——螺距,mm;
p——电机极对数。
若d=1 mm,i=1∶1,那么电机转一周,末端执行组件平移1 mm,l=1/6pmm。
若d=1 mm,i=10∶1,那么电机转一周,末端执行组件平移0.1 mm,l=0.1/6pmm。
若d=1 mm,i=100∶1,那么电机转一周,末端执行组件平移0.01 mm,l=0.01/6pmm。
步进电机控制末端执行组件到达杂草的位置时,锯齿圆形刀片先开始动作,在转盘的旋转下来回切割杂草,所以刀片的作业速度由转盘的旋转速度决定,刀片上任一瞬间的速度为
当ωt=π+2kπ(k=0,1,2,…,n)时,则
vj=rω
式中:vj——刀片的切割速度,m/s;
r——刀片内端半径,mm;
ω——转盘的角速度,rad/s。
2 基于WiFi的玉米除草机器人控制系统设计
2.1 玉米除草机器人控制系统设计
除草机器人的控制系统如图3(a)所示,基于Linux操作系统,采用ROS集成开发环境开发的ARM11主控板和3块STM32从控制板实现控制操作。ARM11主控板通过串口接收STM32从控制板发来的数据,基于ROS_serial节点桥梁功能,按数据协议发布msg消息到ros通信网络;ARM11主控板到STM32从控制板的通信为ARM11主控板从ros网络接收话题消息,通过串口传输到STM32从控制板,以控制底层驱动。

(a) 除草机器人控制系统

(b) 除草机器人通信设计图3 玉米除草机器人控制系统设计Fig. 3 Design of control system for corn weeding robot
ARM11主控板用于避障和检测识别杂草以及向STM32从控制板下发指令,且从控制板1用于控制机械臂组件,从控制板2用于控制机械臂末端执行组件,从控制板3用于控制轮动电机。具体为视觉传感器模组的图像输出接口连接主控板,并将采集到的图像数据传输给主控板进行处理,实现主控板避障和检测识别杂草的功能。旋转电机Ⅰ、基座舵机、肩座舵机和肘部舵机的信号线均与从控制板1相连接,从控制板1通过调节脉冲宽度来驱动基座舵机、肩座舵机和肘部舵机,从而调节肩座、大臂、小臂的移动;同时从控制板1通过输出信号来控制旋转电机Ⅰ的正反向旋转,以调节机械臂所指的方向。旋转电机Ⅱ、执行电机和电磁喷雾控制器的信号线均与从控制板2相连接,从控制板2通过输出控制信号来控制整个执行组件的运行以及化学除草剂的喷洒。轮动电机与从控制板3相连接,当主控板识别出杂草后,主控板能够根据像素坐标系到世界坐标系下的转换关系获取空间位置,并将位置信息通过串口传输给从控制板3,从控制板3下发指令并输出PWM波通过电机驱动器驱动轮动电机转动,使小车主体到达指定位置;且轮动电机连接从控制板3的芯片编码器,实现从控制板3能够获取轮动电机的转速值并回传给主控板。
2.2 基于WiFi的玉米除草机器人通信设计
除草机器人和手机控制端通过大功率WiFi中继器实现无线通信,不仅通信可靠而且方便快捷。该手机控制端的功能有两个,一是实时接收视觉传感器实时回传的图像信息,监测除草动态;二是通过WiFi模块、WiFi路由器、WiFi中继器所建立的通信信道向主控板发送指令。除草机器人的通信设计如图3(b)所示[19-20]。除草机器人通信模块为WiFi路由器安装在小车上,用来捕捉图像的视觉传感器安装在小车前端外侧,视觉传感器采用CMOS数字图像传感器作为数字化采集单元,其型号为MT9V022IA7ATC,其连接的视觉传感器模组安装在小车前端内侧,视觉传感器模组采用DSP信号处理芯片,其型号为ADSP-BF592KCPZ-2,视觉传感器模组的网络接口连接WiFi路由器,通过大功率WiFi中继器实时回传视频至手机控制端,所述视觉传感器模组的图像输出接口连接ARM主控板的HDMI接口,将采集到的图像数据交给ARM主控板进行算法处理。ARM主控板内置WiFi模块,通过WiFi路由器、大功率WiFi中继器与手机控制端传输指令。
3 玉米除草机器人控制系统实现
3.1 采集和处理图像
视觉传感器采用CMOS传感器作为数字化采集单元,通过视觉传感器获取玉米和杂草图像信息,并将数字信号传输到ARM处理器进行处理[21-24]。ARM处理器对采集到的图像信息,基于最大正方形原理的玉米作物行骨架提取算法,进行灰度化、阈值分割、滤波处理,区分玉米作物和杂草,准确定位杂草位置,测算距离,将位置和距离信息通过串口输出信号给STM32从控制板,为后续的除草机器人执行动作控制提供信息。除草机器人整体控制流程如图4所示。
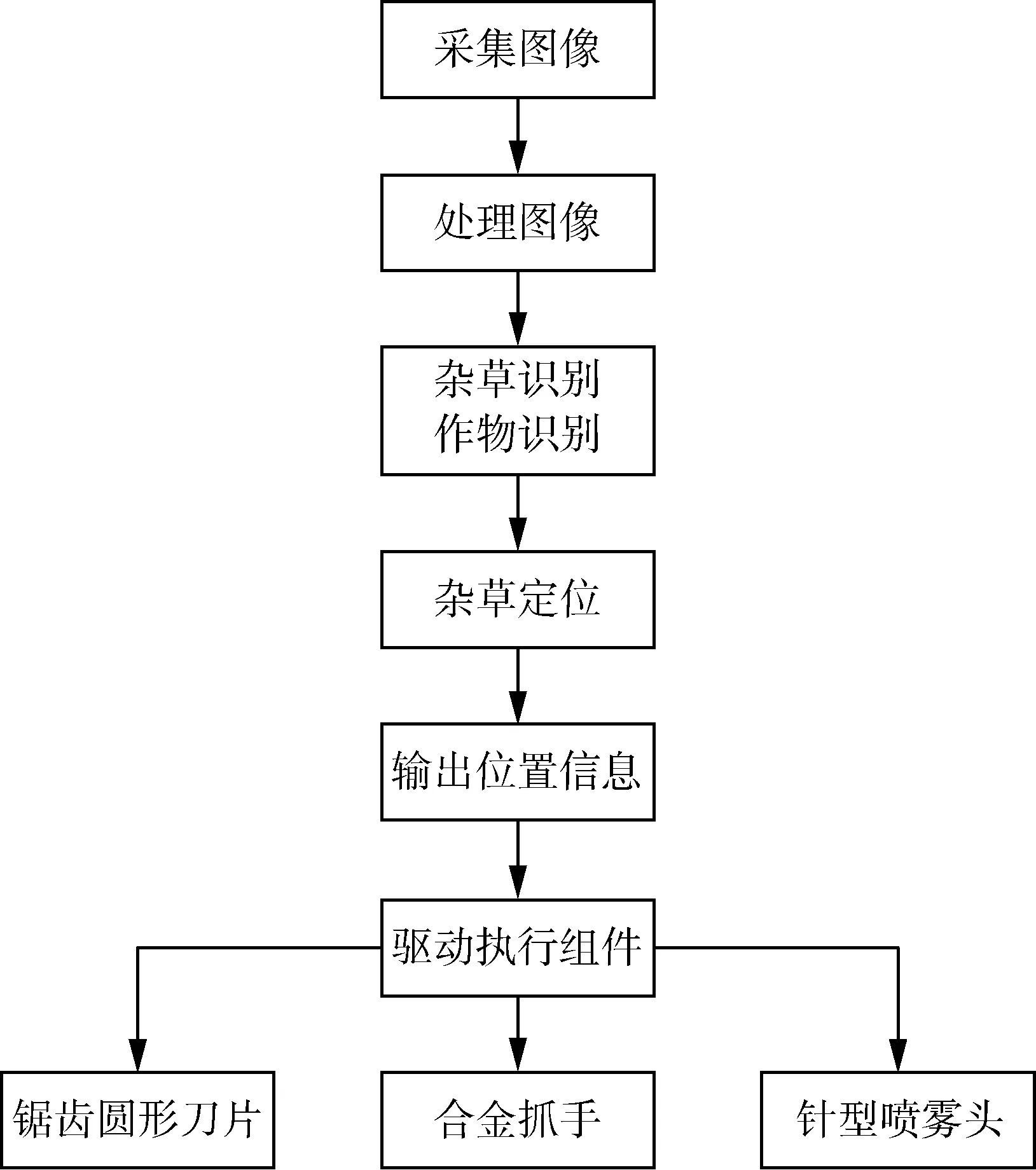
图4 除草机器人整体控制Fig. 4 Overall control of weeding robot
3.2 除草机器人运动功能实现
STM32从控制板3输出信号,控制步进电机驱动行驶轮,使除草机器人行走到指定位置,然后STM32从控制板1驱动机械臂各关节电机,控制肩部、大臂、小臂的向上向下移动,相互配合使除草机器人的末端执行组件到达杂草位置。STM32从控制板3的编码器引脚与步进电机的AB相连接,GPIO引脚连接电机驱动控制行驶轮的正转和反转,PWM引脚连接电机驱动,STM32从控制板3控制电机驱动行驶轮行驶的步骤为:打开PWM设置转速,同时使用_HAL_TIM_GET_COUNTER()获取电机编码器的tick值,根据时间获取当前时刻转速值,根据转速的误差进而产生PWM波,再用PWM波控制电机转速,做一个闭环控制。
3.3 末端执行组件除草功能算法实现
玉米除草机器人的末端执行组件开始完成除草工作的三步走,锯齿圆形刀片固定在旋转机芯盘上,在旋转机芯盘左右旋转和机械臂配合下,完成锯齿圆形刀片松土除草工作,在旋转机芯盘和机械臂配合下,完成合金抓手抓取杂草并放入集草箱,在旋转机芯盘和机械臂配合下,STM32从控制板控制打开电磁阀完成针型喷雾头的精准喷射。
除草机器人完成锯齿圆形刀片的松土除草算法如下。
1) STM32从控制板2的MCU对腕部旋转电机驱动器进行初始化,然后驱动器对旋转电机进行初始化,MCU把相应频率的脉冲信号传送至驱动器,通过驱动器的缓存配置,控制腕部旋转电机按照要求的脉冲数进行逆时针或顺时针运行,直到旋转相应的角度后,使锯齿圆形刀片位于末端旋转机芯盘正下方。
2) STM32从控制板1的MCU输出控制信号控制机械臂的肩部、大臂、小臂移动,直至锯齿圆形刀片靠近除草位置。
3) STM32从控制板2的MCU中断对腕部旋转电机驱动器初始化,设置相应频率的连续脉冲信号,通过驱动器的缓存配置,控制旋转电机顺时针和逆时针往复旋转,同时控制机械臂配合,使锯齿圆形刀片不断向除草位置递进,切除杂草。
4) STM32从控制板2的MCU控制腕部旋转电机旋转,使针型喷雾头正对除草位置,然后输出信号控制电磁喷雾器,使针型喷雾头喷射除草剂,避免残留物重生。
5) STM32从控制板2的MCU控制腕部旋转电机旋转,使合金抓手正对除草位置,然后输出信号给合金抓手舵机,控制抓手完成杂草的夹持工作。
6) STM32从控制板1的MCU控制机械臂旋转云台旋转,使机械臂顺时针或逆时针旋转180°,然后驱动肩部、大臂、小臂协调配合,然后STM32从控制板2的MCU输出信号打开合金抓手,完成杂草放入集草箱的动作,集草箱的底部安装有压力传感器,且压力传感器连接主控板,压力传感器用于实时监测所收集的杂草重量并传输给主控板,且主控板内预设有重量阈值,当集草箱内的杂草重量超过该重量阈值时,主控板将超重信号反馈给控制终端以提醒及时处理。
4 试验结果分析
试验在室内土槽试验台上进行,除草区长度20 m,宽度1.5 m,土槽深0.5 m,土槽面积30 m2。在现有试验条件下,为增加幼苗及杂草的数量,加大了幼苗密度,苗间距300 mm,每行幼苗为60株。泥脚深度为200~250 mm,最深达350 mm,平均株高150 mm,由于在室内试验,杂草人工种植,主要为稗草、狗尾巴草、马齿苋。
4.1 试验评价指标
除草率和伤苗率是检测除草作业质量的主要指标[3]。所以,选择除草率和伤苗率作为除草作业任务的评价指标。
除草机器人除草率
式中:X——检测区域内除草前杂草数;
Y——检测区域内除草后杂草数。
伤苗指的是在除草作业过程中,玉米苗被机器打断、掩埋、连根拔起等情况,伤苗率
式中:M——除草后检测区域内损伤玉米苗数;
N——检测区域内总玉米苗数。
4.2 试验结果与讨论
对智能除草机器人的作业性能进行测试,如图5所示。本文通过试验设计的方法,选择除草部件类型、工作速度、除草深度3因素3水平进行正交试验,试验因素与水平如表2所示。根据理论分析预估各因素的取值,机具工作速度的取值范围是0.6~0.8 m/s,除草深度的取值范围是25~45 mm。通过正交试验进行设计,选择除草率和伤苗率作为试验指标,正交试验结果如表3所示。

图5 切割部位喷洒除草剂Fig. 5 Spraying herbicide at cutting site
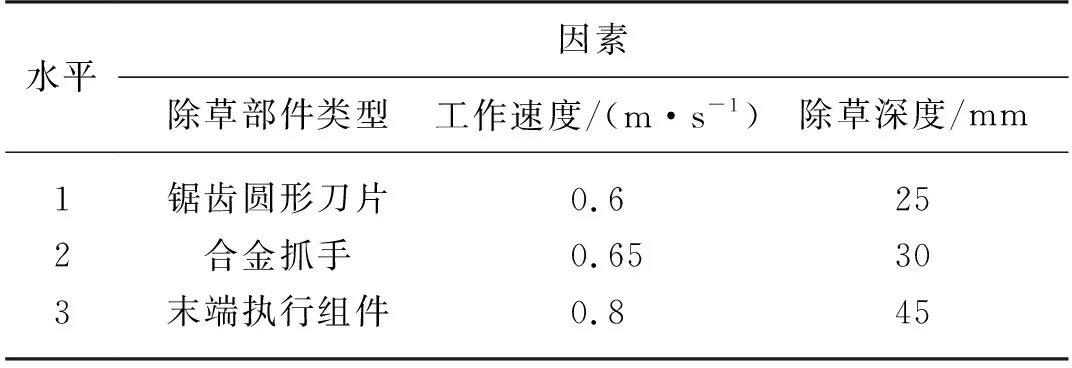
表2 试验因素与水平Tab. 2 Factors and levels of text

表3 正交试验结果Tab. 3 Results of orthogonal experiment
由表3可知,在保证除草深度不变时,末端执行组件的除草率最高,并且机具在低速运行时除草率达到最高97.6%,末端执行组件和单一除草部件相比较伤苗率明显偏低为1.6%。为了能更清楚地看出来各因素的主次顺序,对除草机器人的除草率和伤苗率做进一步分析,分别求出均值和极差,如表4所示。
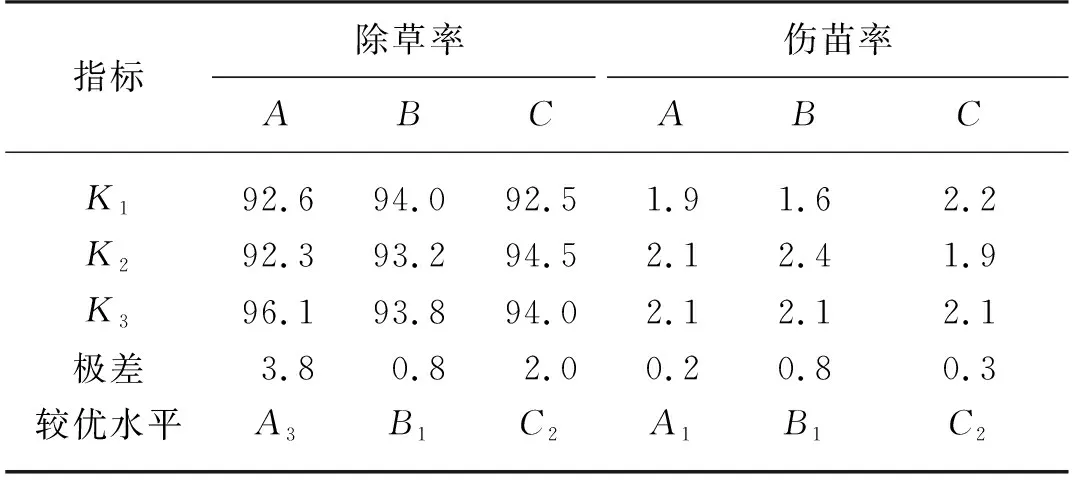
表4 除草率和伤苗率均值、极差Tab. 4 Weeding rate and seedling injury rate mean and range
由表4分析可得,当只考虑除草机器人的除草率时,各因素影响除草率的主次顺序为除草部件类型>除草深度>工作速度;当只考虑除草机器人的伤苗率时,各因素影响伤苗率的主次顺序为工作速度>除草深度>除草部件类型。由此可得,最优组合是除草部件类型为末端执行组件、工作速度为0.6 m/s、除草深度为30 mm。在最优组合下,平均除草率为94.9%,平均伤苗率为1.9%。
本文设计的是基于WiFi通信的除草系统包括手动除草和机械除草,由于通信可靠,工作效率更高,除草效果更好。除草机器人机械臂末端执行组件中的锯齿圆形刀片的入土深度越大,对于杂草根土复合体的破坏作用越强烈,利于合金抓手抓取杂草,在配合针型喷雾除草剂,使得除草率增加。但是由于锯齿圆形刀片扎进土壤中,会产生旋转运动的阻力,所以在机具前进的除草中,会出现错位、移位的偏差,出现伤苗现象。除此之外,机具的前进速度越快,对除草装置的避苗动作的反应灵敏度要求越高,因此,过快的机具前进速度也是造成伤苗的原因之一。
5 结论
1) 本文设计了一种基于WiFi通信的玉米除草机器人,除草机器人机械臂末端执行组件为人字形结构转盘,由锯齿圆形刀片、合金抓手、针型喷雾头组成。机械除草过程是用40齿锰钢锯齿圆形刀片切割杂草,切割范围120 mm,然后使用ROBOTIQ电动夹爪夹持切割过的杂草,夹爪开合最大距离为155 mm,能夹持最多5 kg负载。利用锯齿圆形刀片和合金抓手处理完杂草后,再用针型喷雾头对准切割杂草部位喷射农药,保证除草更加彻底。
2) 玉米除草机器人控制系统设计是基于Linux操作系统,采用ROS集成开发环境开发的ARM11主控板和3块STM32从控制板实现控制操作。通信设计是玉米除草机器人和手机控制端通过大功率WiFi中继器实现无线通信的,并且手机控制端能实时接收视觉传感器实时回传的信息。
3) 通过正交试验分析可知除草机器人在工作速度为0.6 m/s、除草深度为30 mm,除草部件类型为末端执行组件时除草率最高,是该除草机器人的最优组合,平均除草率为94.9%,平均伤苗率为1.9%。本设计经过土槽试验表明具有较好的作业性能,智能化程度高,可以为农业除草装置的后续研究提供参考。
猜你喜欢
科学与财富(2022年3期)2022-06-01
幼儿教育·父母孩子版(2019年5期)2019-10-18
文苑(2018年22期)2018-11-19
科技信息·中旬刊(2018年9期)2018-10-21
教育教学论坛(2017年34期)2017-08-30
中国科技纵横(2017年13期)2017-08-09
新少年(2017年1期)2017-03-15
科学种养(2015年11期)2015-11-10
中学科技(2008年7期)2008-08-14
祝您健康(1985年6期)1985-12-30