自适应车辆检测跟踪系统
2022-04-22 00:13:04李嘉仪张福鼎
电子测试 2022年7期
李嘉仪,张福鼎
(江苏第二师范学院物理与电子工程学院,江苏南京,210013)
0 引言
城市工业化快速发展,大力扩张城市道路,交通运输已成为人们日常生活中不可或缺的一部分。要想在复杂的城市道路上快捷准确地知道汽车所行驶的位置信息,就需要对车辆实时进行智能定位[1-4]。设计一款可以实时监测动态移动目标的智能车辆定位系统,智能车辆定位系统由GPS定位模块、GSM通信模块和OLED显示模块组成,智能车载终端不仅可以实现全天候实时记录车辆的行车状况,同时也能向监控中心实时双向传输数据,并可以在液晶显示屏上准确显示CPS定位信息,包括经纬度、定位状态等[5-6]。
在自适应光照系统领域,前人做了相关的研究生产相关的电子产品,但由于这类电子产品的元器件是由分立元件组成的,所以灵敏度和稳定性相对较差。单片机能胜任许多工作,具有成本低、稳定可靠的特点。在许多发达国家的交通事故监测和交通流量采集系统研究中应用图像处理和计算机视觉技术,模式识别技术等[7-11]。随着瞬间模式识别技术和计算机视觉技术的飞速发展,瞬间检测技术在基于视频的交通检测中发挥着越来越重要的作用。美国、日本和欧洲的几个发达国家已经投入了大量的人力、财力和物力研究开发此类检测技术,其中代表性产品有欧洲的cos系统、autoscope2004tm成像探测系统等。美国starry公司开发的Vantage,是另一种用于解决交通视频采集任务和提供准确数据的视频车辆检测器。汽车探测器的优点在于具有自己的报警处理功能,世界各国大多都采用这一类汽车探测器。与此同时,加利福尼亚大学,圣地亚哥的计算机视觉和机器人实验室,正在智能交通系统方面做大量的工作。实验室开发的航标系统是一个复杂的分布式多传感器视频检测系统,称为aton系统,用于道路交通事故检测管理和交通流分析。另外,此系统还将阴影检测技术融入到系统中,取得了良好的效果。
89系列单片机是阿特梅尔公司的8位flash系列单片机。这个系列单片机最大的特点是芯片中含有闪存。它不仅可以方便地存储所开发的程序,而且不需要额外的存储模块。应用前景十分广阔。它特别适用于便携式,节能和特殊的信息存储仪器和系统。
STC89C52是英特尔公司MCS-51系列单片机的基础产品。采用atmelcmos可靠技术制造高性能8位MCU,是属于MCS-51的HCMOS标准产品,结合了高速高密度CMOS技术和低功耗CMOS特性。它是基于MCS-51标准体系结构和单片机指令的。它属于独特芯片的增强版。它集成了更多的功能作为时钟的输出,并输出到CIMA或down counter。它适用于类似的发动机控制应用。STC89C52有两种封装类型:PDIP(40针)和PLCC(44针)。CPU的运行非常需要准确的时间,可用一个晶体振荡器产生稳定的时钟脉冲来控制。STC89C52单片机上的Xtal1和Xtal2分别选择12MHz作为振荡电路的输入和输出。
电容电路中有两个C2和C3电容器的功能;一是帮助振荡器启动;二是对振荡频率进行微微的调整。石英晶体可供选择的有6MHZ和12MHZ。频率不同机器的循环的时间不同,会影响计数器的初始数值和工作速度。速度传感器模块,通过车速的数值检测,判断车辆是不是处于停车的状态,控制计时器。开关模块,控制整个电路的开关。灯光感应模块,通过对周围环境亮度变化的检测,判断是否打开车灯,结合图像检测模块判断是否进行远近光灯切换。灯光模块(计时器模块),通过芯片输出的电平控制继电器的吸合控制灯光或计时器。
1 自适应车辆检测跟踪系统设计
首先进行图像预处理和背景建模,分析对比并总结背景建模常用方法,以背景差法为基础设计背景建模方法,针对主干交叉道口等复杂场景创建进行背景更新快速运算模块。通过此背景更新模块实时获取最新背景,给后续的车辆检测跟踪操作奠定基础。
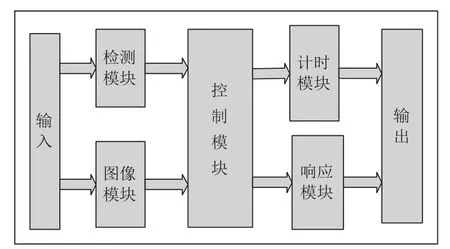
图1 总体设计框图
其次,针对运动中车辆进行检测、分割及跟踪分析,结合多种常用车辆检测方法,改进运动车辆检测方法,主要集中于克服传统背景差法检测后出现的前景目标孔洞和边缘缺失现象,并且针对复杂场景中运动目标多样性,采用分类运动目标,提取出主要特征,再融合阴影去除运算,抑制消除车辆的阴影,设计出基于Kalman预测的运动车辆跟踪方法。
利用单片机信号采集模块来采集自然光信号,并通过单片机的AD转换模块来进行信号转换,最后车灯自适应复杂环境来实现自动灯光切换。通过设计电路,软件仿真,设计PCB板展开验证。
STC51芯片用于对开关、光传感器、红外传感器、图像传感器等信号进行处理,并对与其相连的照明、定时器等系统进行控制。该控制器件要处理来自总线上其他控制单元的信息,以供系统使用。监控系统的现状,驱动异常使用时的报警信息,控制传感器工作,接收传感器的开关信息,从而控制相关部件的工作,存储与系统相连的故障信息,专用诊断工具可读取相关故障信息。红外传感器是由红外发射管发出不可见的红外光,红外光经检测面反射后被接收管接收,从而检测到物体。要考虑其检测距离、灵敏度和工作稳定性(受日光的影响)等问题。光的传感器采用光敏电阻采集光照强度信息。光照强度直接反映在光敏电电阻阻值上,进而反映在光敏电阻两端的电压值上。然后通过单片机控制A/D模数转换对电压信号进行采集。
通过实时视频监控,可以及时获取和监控有效的数据、图像或声音信息,并且能记住突发的异常事件的过程,确保能够及时的传达命令、组织警力,数字监控报警的特点是:实时显示监控图像,可以统一设置视频图像质量,单独设置各通道视频速度,设置多种视频模式,快速呼叫,网络传输,自动备份,镜头/云台控制等。使用特定的定时器原理来测量时间,定时器的特:操作界面简单易用,提供基本的定时控制功能,包括:启动定时、停止定时、继续定时、定时调整、归零等。灯光系统感受到外部光照的强弱变化切换车辆前照灯的亮灭和明暗以适应外部环境。
利用计时器特定的原理来测量时间。操作界面简便易用,提供了基本的计时控制功能,包括:开始计时、停止计时、继续计时、操作界面简便易用复零、调整计时。灯光系统感受到外部光照的强弱变化切换车辆前照灯的亮灭和明暗以适应外部环境。计时器检测到速度小于1km/h开始计时,速度大于1km/h停止计时,最后输出计时时间。速度传感器模块,通过车速的数值检测,判断车辆是不是处于停车的状态,控制计时器。开关模块,控制整个电路的开关。灯光感应模块,通过对周围环境亮度变化的检测,判断是否打开车灯,结合图像检测模块判断是否进行远近光灯切换。灯光模块(计时器模块),通过芯片输出的电平控制继电器的吸合控制灯光或计时器。
2 系统设计流程图及程序说明
普通光传感器本质上是一种光敏元件,它的功能是将光的强度信号转换成电信号,然后由独特的单片机接收,根据环境光强分析判断前照灯是否应该打开,若前照灯没有打开,则检测外部光照强度,外部光照强度过弱时,打开前照灯;若前照灯已打开,检测外部光强,外部强度强时,关闭前照灯相关处理,然后输出给控制模块电磁继电器,实现对灯光的自动控制。
环境光传感器优于普通光传感器在于其不仅可以感知周围的光线,还能传输信息给处理芯片自动调整屏幕的背光亮度,以降低产品的能耗,例如在手机、钞票等移动应用中就会使用环境光传感器。环境光传感器可以最大限度地延长电池的工作时间。在其它方面,环境光传感器有助于显示平滑的图像,当环境亮度较高时图像显示会很尖锐,使用环境光传感器的LCD会自动调节到高亮度,当外部环境比较暗的时候,显示器将设置为低亮度来进行自动亮度调节。环境光传感器的特点是,不仅需要在芯片上贴上红外切割膜,还需要直接在硅饼干上涂上红外膜。

图2 光感及速度检测
该太阳敏感器能在360度水平和垂直方向上识别太阳的位置,并在多云、半阴、晴天和夜间跟踪各个方位角,在识别电路和驱动的处理过程中,采用数字芯片完成上述信息的处理,可以服务于各类普通发动机和步进发动机。
速度传感器检测车辆速度是否小于一公里每小时,当速度小于一公里每小时时开始计时,否则就再次检测,即使开始后再次检测速度是否少于一公里每小时,若大于一公里,每小时则结束计时,否则再次检测。
3 Protues仿真
由单芯片周边部件、AD数模转换模块、信息收集模块、执行继电器等构成。在此系统中,光传感器的功能是将光的强度信号转换成电信号,用单处理器接收信号,分析处理后向控制模块输出电磁继电器,使用实现照明自动控制的光传感器。只有使用的感光传感器具有高灵敏度的特点,才能快速捕捉对置车的直射光,然后将采集到的光的强度信号转换成电信号。可以正确地处理转换后的信号,并且可以通过继电器正确地接收,实现远距灯的精确转换控制,用来阻止转换错误。
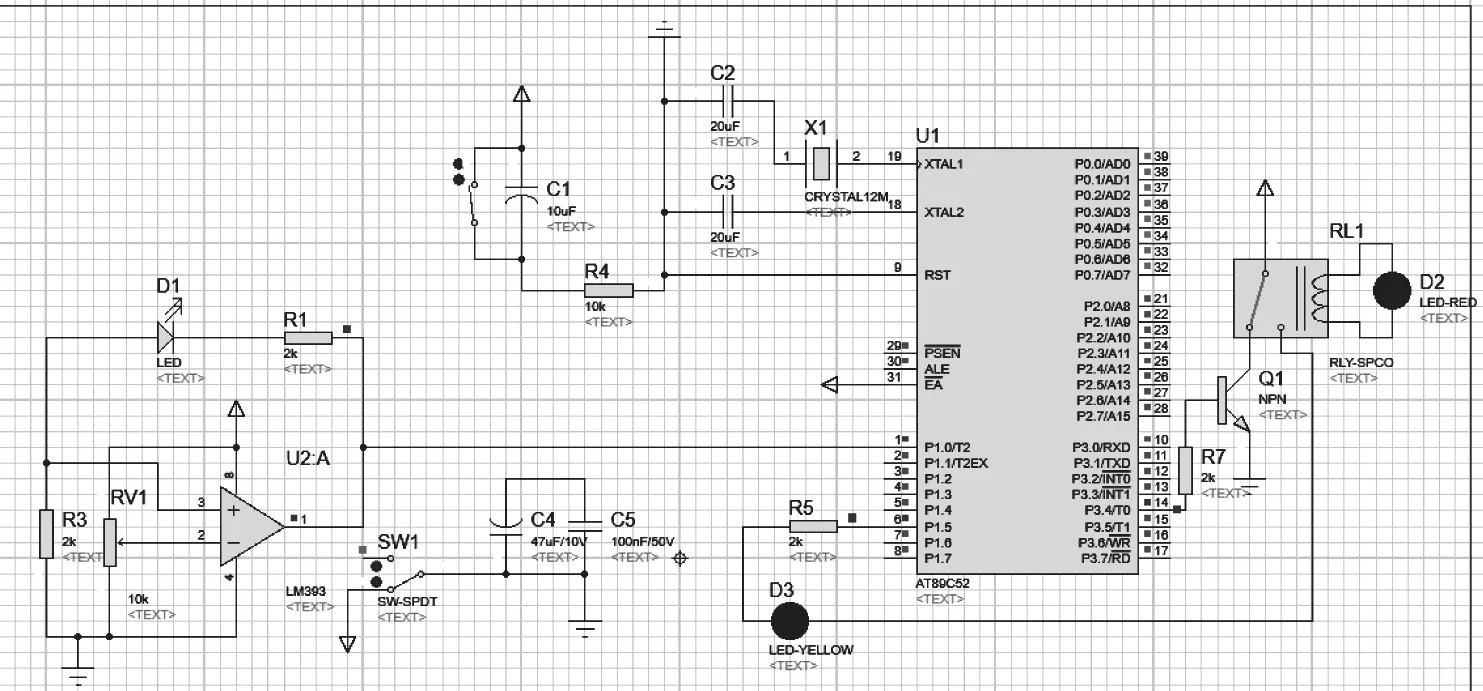
图3 proteus仿真运行图
4 总结与展望
此次课题研究我们在城市流量大的环境和复杂的十字路口等场景中对汽车进行正确的实时追踪和检查。预期在具体检测和跟踪算法中针对不同的难点进行分析并改进。根据车辆性能不同,使用不同的车辆跟踪算法,使特定的车辆匹配更加合适跟踪算法,提高跟踪准确性。基于大数据、GPS、传感器测量车速等各项条件限制,让汽车在夜间自动控制远射灯的切换,以及灯具可纳入自适应操作场景,本系统主要实现动作继电器、光传感器采集信号、主要是单片机控制。如果系统安装在车辆上,在车辆晚上行驶时,可根据车辆与前车的行驶距离进行判断,从而实现车辆前照灯远近光的相应转换功能。
猜你喜欢
液晶与显示(2024年1期)2024-01-31 06:13:28
作文周刊·小学一年级版(2022年12期)2022-03-19 12:35:56
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:06
计算机研究与发展(2019年2期)2019-02-20 08:47:28
汽车维护与修理(2018年7期)2018-10-13 06:03:48
发光学报(2017年5期)2017-06-01 11:29:34
妈妈宝宝(2017年2期)2017-02-21 01:21:22
汽车维护与修理(2016年4期)2016-11-26 06:29:50
汽车零部件(2014年7期)2014-06-23 16:26:07
中小学实验与装备(2014年1期)2014-05-26 18:30:08