
华南暴雨区域集合预报中不同同化方案的影响试验研究
2022-04-22 02:43:16张凯锋王东海张宇张敏张少婷
热带气象学报 2022年1期
张凯锋,王东海,张宇,张敏,张少婷
(1. 佛山市气象局,广东 佛山 528000;2. 中山大学大气科学学院/广东省气候变化与自然灾害研究重点实验室/南方海洋科学与工程广东省实验室,广东 珠海 519082;3. 广东海洋大学南海海洋气象研究院,广东 湛江 524088;4. 广东省气象探测数据中心,广东 广州 510641)
1 引 言
数值天气预报是根据当前大气状态、合理的侧边界条件和合适的下垫面对未来的大气状态进行模拟演变的结果。因此提高模式初值场的准确性和侧边界场的合理性能够显著提高数值天气预报的结果。随着全球各种观测资料的不断丰富以及计算机资源的日益高效,通过改善模式初值场来提高模式预报质量成为当今提高数值天气预报准确率的主要研究方向。同时大气状态的混沌效应和不确定性,给确定性预报带来一定的局限性,集合预报能够描述数值天气预报中大气的不确定性,其给出的概率预报在数值天气预报中具有更加重要的意义,在国内外也得到了快速的发展[1]。集合预报初始扰动的构造对集合预报质量具有决定作用,如何获得更合理的初始扰动也是当下集合预报研究的核心内容之一。
资料同化正如Talagrand所述是一种利用现有尽可能多的观测信息来定义一个最大可能精确大气运动状态的方法,其根据一定的优化标准和方法,将不同的观测资料与短期预报结果统计结合,进而改善模式的初值场[2]。现今,资料同化建立在基于统计估计理论的集合卡尔曼滤波方法和基于最优控制理论的变分方法。这两种同化方法也显现出各自的缺点,由于三维变分方法的背景误差协方差的构造是采用预报和观测不随时间变化且服从高斯分布的各项均匀、同性假设,因此背景误差协方差是固定不变的[3]。而在实际大气中背景误差协方差是随气流而变化。集合预报方法具有大气的不确定性特征,可以有效体现出大气的流依赖特征[4]。但同时集合卡尔曼滤波的协方差只能从非常有限的集合预报样本估计得到,与模式本身很大的自由度相比,它的秩是欠定的,而与三维变分方法组合后可以有效解决这个问题[5]。为了更加完善数值预报初值场的质量,进一步改善预报效果,Hamill 等提出,在三维变分的基础上,将原有三维变分的静态误差协方差改为流依赖的集合样本背景误差协方差与统计静态背景误差协方差的线性组合,即变分同化方法和集合卡尔曼滤波同化方法相结合的混合同化方法[6]。
目前国内外对资料同化的研究已经十分丰富,三维变分是目前业务应用最为广泛的同化方案,张诚忠等[7]基于三维变分对2017年登陆广东的台风进行数值模拟,表明同化地面和探空资料能够改善台风路径的预报。同样,王洪等[8]研究了4 部多普勒雷达对“7.21”北京特大暴雨过程中降水预报的改善作用,结果表明利用循环同化雷达观测资料改善了短时(0~6 h)和短期(0~24 h)降水预报,ETS 评分提高了约0.2。张明阳等[9]提出混合同化背景误差协方差的流依赖特征不仅与集合样本有关,还与构造集合协方差的ETKF方法有关,在集合样本和ETKF方法共同作用下才将流依赖信息引入混合协方差之中。同时夏宇等[10]在针对青藏高原地区展开混合同化试验,指出在青藏高原地区和槽脊系统附近,混合同化的分析增量更能够体现出大气流依赖特性。Wang等[11-12]通过En-3DVar混合同化方案增加局地化和膨胀因子等参数完善了混合同化技术,并且指出混合同化技术相比于3DVar 同化技术,有显著提高,特别是在资料比较稀疏区域。同样,夏宇等[13]针对不同地形展开En-3Dvar 的局地化最优系数试验,得出高原和平原最优水平局地化尺度分别是1 500 km和1 000 km,并指出考虑了复杂地形对水平局地化尺度影响的混合同化试验的预报效果会更好,特别是在前30 h的预报中。
数值天气预报经过几十年的发展,单一的确定性预报日趋完善,但单一确定性预报对于华南前汛期暴雨落区和强度方面的预报存在可信度的不稳定,区域集合预报产品对暴雨过程能够提供更有价值的指导预报[14]。区域集合预报可以通过传统扰动方法获得初始扰动,如增长模繁殖法、奇异向量法等[15-18],也可以通过全球集合预报场以动力降尺度方法获得区域集合预报初始扰动[19-20]。马旭林等[21]发展设计了一种基于资料同化思想,利用CMA 三维变分同化系统,将全球大尺度信息与区域模式的中小尺度信息相结合,使区域集合预报初始扰动的物理结构更加合理,并改善了大雨和暴雨的降水概率预报效果。李霁杭等[22]指出采用优化样本的EnKF 可以改善对威马逊台风路径、强度及台风结构的模拟效果。本文基于动力降尺度方法获得区域集合扰动,探讨在一次华南前汛期暴雨过程中不同同化方案对区域集合初始扰动场的影响。
2 资料与方法
本文基于全球集合预报场GEFS,通过动力降尺度和不同同化方案进行更新初始场扰动。针对不同同化方案对集合预报扰动场的改变,本文将探讨3DVar同化、EnKF同化和3D-EnVar混合同化(下称Hybrid)对集合预报效果的改善程度。下面对三种同化方案作简要介绍。
2.1 三维变分(3Dvar)同化
传统3DVar 同化的目标函数定义为被背景误差协方差的逆矩阵所加权的x与背景场xb的距离,加上被观测误差协方差的逆矩阵所加权的x与观测yo的距离:

为了找到一个使目标函数极小化的最优分析场xa。其中B 为背景误差协方差矩阵,是一个常数;H 表示非线性算子;R 表示观测误差协方差矩阵;T表示矩阵的转置。
2.2 集合卡尔曼滤波(EnKF)同化
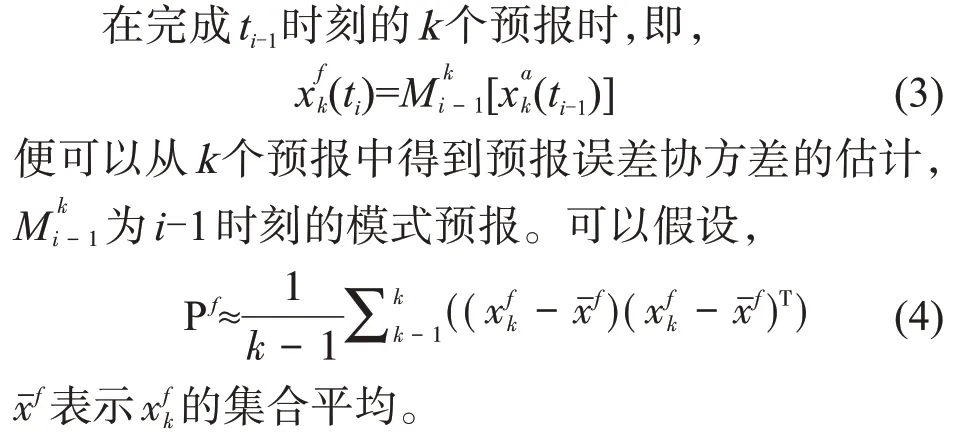
卡尔曼滤波方法与三维变分的一个主要不同是其背景误差协方差不是一个常数,而是被随时间演变的预报误差协方差Pf(ti)所代替:

考虑到卡尔曼滤波方法所需的计算量过大,集合卡尔曼滤波方法EnKF 成为其简化的方法,Evensen[23]和 Houtekamer等[24]提出k个成员的资料同化循环作为一个集合同时完成,为了保证他们的独立性,分别加入不同的随机扰动,这样的集合可以用来估计预报误差协方差,从而可以获得大气的流依赖信息。
2.3 混合(Hybrid)同化
由于EnKF 的协方差所需要的集合预报样本有限,且与模式本身的自由度相比,它的秩是欠定的。Hybrid 混合同化方法基于三维变分方法的基础上,将3DVar 同化的静态背景误差协方差改为具有流依赖性的集合样本背景误差协方差与统计静态背景误差协方差的线性组合,这样确保背景误差协方差仍具有流依赖性,同时改善了EnKF同化样本不足的问题,其中预报误差协方差Pfh通过B和Pf的线性组合获得:

同时指出a在0.1~0.4 之间可以得到最好的结果[12]。NCEP 采用 Pf的占 75%,即a=0.25,这里也采用相同混合系数a。当a为0 时表示纯EnKF同化方法,a为1时为纯3DVar同化方法。
2.4 资 料
为了较好对比Hybrid、3DVar和EnKF,模式所用的全球背景场为美国国家环境预报中心(The National Centers for Environmental Prediction,NCEP)全球集合预报[25],集合成员21个,其中包含一个控制预报和20个扰动成员预报,每6 h 的预报场分别作为模式试验的背景场和侧边界条件场,水平格点数为360×181,垂直层数为26 层,模式层顶为10 hPa。
采用中国地面逐时站点实况降水资料对不同试验的降水预报效果进行检验,时间段为2019年6月10日00时—12日00时(世界时,下同),实况站点分布如图1 所示。此外,利用ERA5 欧洲中期天气预报中心第5 代全球气候再分析资料对集合预报高空风场的预报效果进行检验。ERA5 数据的水平分辨率为0.25 °×0.25 °,时间分辨率为1 h,垂直层数为37 层,本文通过将模式数据插值到模式范围内上ERA5格点上进行检验分析。
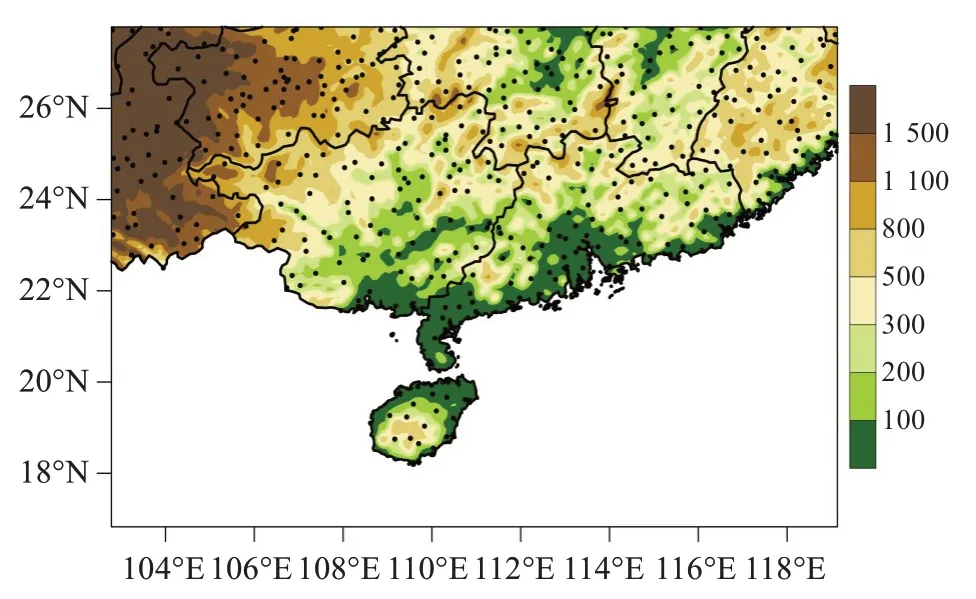
图1 模式试验区域及地面观测站站点分布
同化试验所需要的观测资料有:(1)日本葵花8 气象卫星资料(Himawari-8):Himawari-8 气象卫星在2015年7月2日正式向全球发送卫星观测数据,该卫星定位于140 °E,采用三轴稳定方式,携带AHI(Advanced Himawari Imager)成像仪,提供16个波段的地球全磁盘图像(3个可见光通道、3个近红外通道和10个红外通道)。Himawari-8 卫星可以隔10 分钟观测一次,可见光通道的分辨率为0.5 km,近红外通道和红外通道的分辨率为1 km;(2) 采用全球同化系统(Global Data Assimilation System,GDAS)观测资料(表 1);(3) 常规观测资料。
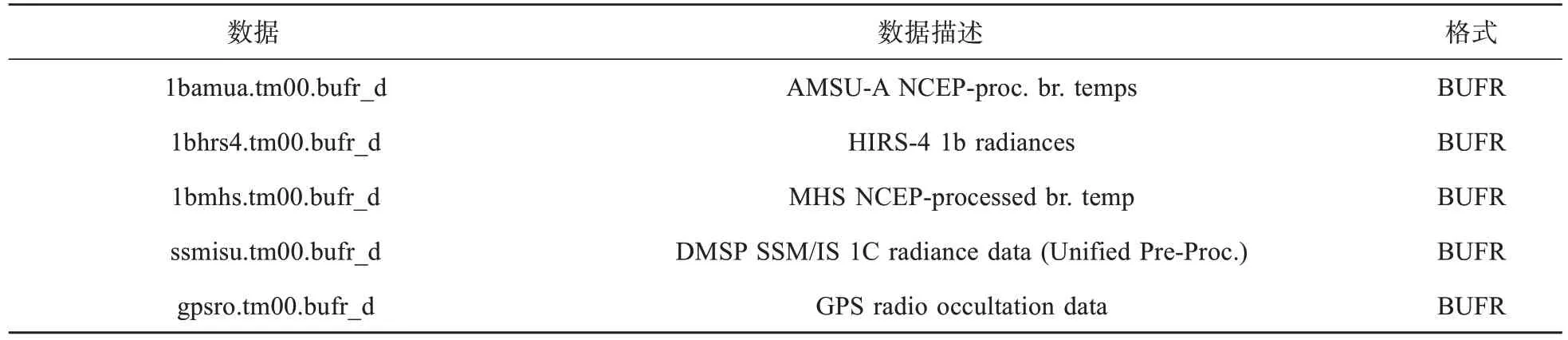
表1 本文使用的全球同化系统观测资料表
使用的常规观测资料是由NCEP 收集的全球高空和地面观测数据。常规观测资料主要包含气压、位势高度、温度、露点温度、风向风速等气象要素。
2.5 模式设置与实验方案
利用WRFV4.0 数值模式预报系统进行区域集合预报试验,模式试验区域如图1 所示,水平分辨率为9 km,水平格点数为178×129,垂直层数为43 层,模式层顶为50 hPa,预报时效为48 h,时间分辨率为1 h。
为了充分对比三种同化试验对华南地区短期预报的预报效果影响,针对 2019年 6月 10日 00 时—12日00 时的一次华南前汛期强降水过程设计试验,试验框架如图2。四组集合预报成员扰动初值的形成过程及特点如表2所示。

表2 四组集合预报成员扰动初值的形成及特点
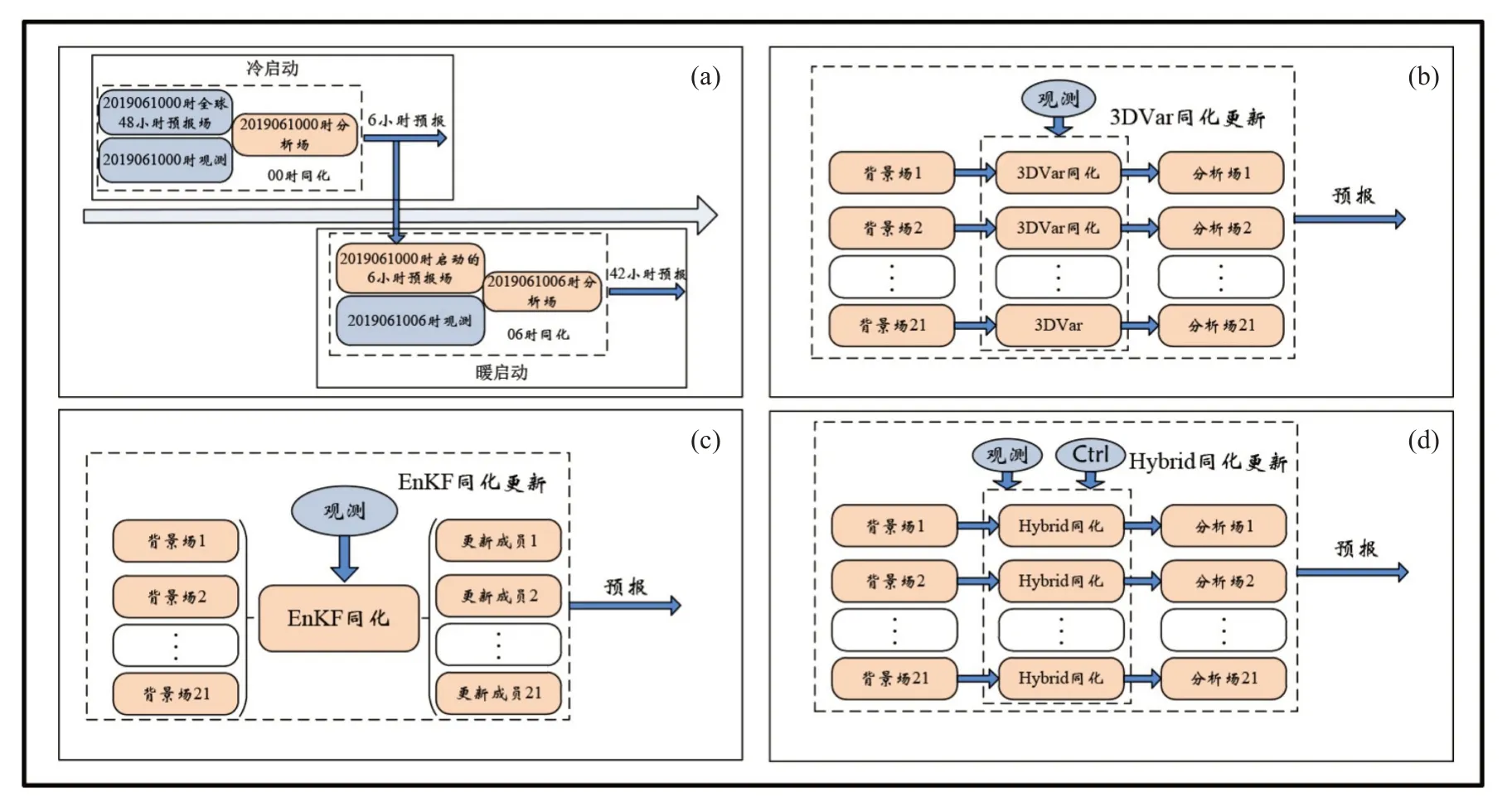
图2 试验框架
Ctrl 对比试验:以GEFS 全球集合预报场作为模式的背景场,21个集合成员不进行同化,分别向前积分48 h。
3DVar 同化试验:以GEFS 全球集合预报场作为模式的背景场,21个集合成员分别在10日00时进行3DVar 同化,并向前积分6 h,然后将06 时的预报场作为背景场再进行06 时的3DVar 同化,并向前积分42 h。
EnKF 同化试验:以GEFS 全球集合预报场作为模式的背景场,21个集合成员在10日00时进行EnKF同化,并向前积分6 h,然后将06时的预报场作为背景场再进行06 时的EnKF 同化,并向前积分42 h。
Hybrid同化试验:以GEFS全球集合预报场作为模式的背景场,21个集合成员分别在10日00时进行Hybrid 同化,并向前积分6 h,然后将06 时的预报场作为背景场再进行06 时的Hybrid 同化,并向前积分42 h。
由于集合预报考虑了不同的初值扰动、不同物理参数化方案组合等,使成员之间的系统性偏差不一致,集合离散度较大,因此为了集合成员之间的偏差相互抵消,过滤掉可预报性较低的预报信息,提高预报的准确性,下面针对四组试验的集合平均预报场进行同化和预报效果对比分析。
3 同化效果对比分析
资料同化方法最直接的目的就是改善大气模式初始场的气象要素场,使模式初始状态更加接近大气的真实状态。因此通过对不同同化试验初始场气象要素的分析与对比,可以更直接反映不同同化试验对模式初始场的改进效果,以评估不同试验的同化效果。下面针对风场、温度场和湿度场三个气象要素,对比分析不同同化方案的气象要素增量、循环同化末端分析场和背景场相对于ERA5再分析资料的误差等内容,进一步分析三种同化试验对初始场的影响。
3.1 同化增量分析
3.1.1 风场增量分析
为了分析不同同化试验集合平均的风场增量对降水的影响,本文对700 hPa 和300 hPa 风场增量进行高低空配置,对风场的涡旋风和流函数进行环流形势的分析,从计算的流函数(涡旋风)的结果可见(图3),三组同化试验在华南地区700 hPa高度都由气旋性环流控制,环流形态相似。其中Hybrid 的气旋性环流更强,在华南地区的覆盖更广。此外Hybrid 试验,广东福建交界处在气旋性中心的东北侧,盛行东南气流。东南气流在广东北部转为偏南气流,一直延伸到广西西北部。该环流形势有利于大量的水汽从南海向陆地输送。而3DVar 和EnKF 试验,在广东福建有明显的反气旋性环流,广东北部的东南气流转为偏西气流,不利于南海的水汽向陆地输送。在300 hPa高度,华南地区也主要由气旋性环流控制,其中3DVar 和EnKF 的气旋性环流较强,环流中心的东侧处于强盛的偏北气流,引导海上水汽的北上。而Hybrid,由于气旋性环流不强,其东侧处于东南气流,引导海上水汽往广东北部输送。在广东沿海由北到南依次出现气旋性环流、反气旋性环流和气旋性环流的交错,其中粤东沿海的气旋性环流较为强盛,东北侧的东南气流引导了水汽向陆地输送。从实况降水可以看出,降水中心主要分布在粤东地区和福建、广东、江西三省交界处;此外,降水主要分布在两广北部,因此Hybrid试验无论在高层还是低层,其环流形势与实际观测的强降雨中心最为吻合。
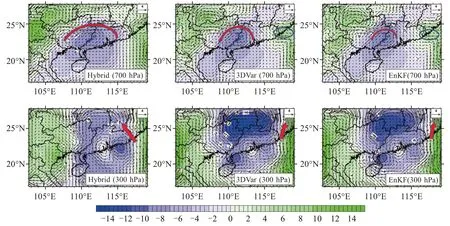
图3 2019年6月10日06时700 hPa和300 hPa三组同化试验集合平均风场增量的流函数(阴影,单位:m/s)和旋转风(箭头,单位:m/s)
3.1.2 温度场和湿度场增量对比分析
分析 700 hPa、500 hPa 和 300 hPa 高度的集合平均温度场和湿度场(图4),正湿度增量的大值区与负温度增量的大值区相对应。三种同化对温度的影响较小,整体上温度增量的绝对值随高度的增加而减小,其中3DVar 和EnKF 在三个高度层的温度增量最大值都小于1 ℃,而Hybrid大于1 ℃。对于湿度增量,Hybrid 相较于 3DVar 和 EnKF 明显较大,低层700 hPa 以负湿度增量为主,随高度增加转为正湿度增量,特别在300 hPa广东福建交界沿海有正湿度增量中心,与风场增量的环流形势有较好的对应关系。由于盛行东南风,该处异常增湿,可增加下游地区(广东东部)的湿度,为强降雨的发生提供有利的水汽条件。其次,3DVar对湿度场有一定影响,主要体现在500 hPa 的负湿度增量,但在中高层,广东福建交界沿海也存在弱的正湿度增量中心。整体上看,Hybrid 对内陆不同高度湿度场表现为正增量,表明Hybrid 同化后的大气偏湿,而3DVar 和EnKF 同化后的大气偏干。湿度的增加,更有利于降水的触发,特别是在粤东地区。

图4 2019年6月10日06时700 hPa、500 hPa和300 hPa高度层的三组同化试验集合平均湿度场增量(填色; 单位:%)和温度场增量(等值线;单位:K)
3.2 分析场误差与扰动特征分析
为了更直观地展现不同同化方案对分析场的改善作用,下面对不同同化试验的集合平均背景场和分析场的扰动与均方根误差进行对比检验。
3.2.1 分析场误差分析
图5 为三组同化试验的同化分析场集合平均相对再分析资料的均方根误差在空间上的分布状况,即对不同高度上的气象要素作为一个数据集进行求均方根误差,Hybrid 的四个气象要素的均方根误差明显小于3DVar 和EnKF,而三组同化试验的背景场均方根误差分布基本一致(图略)。对于分析场和背景场的均方根误差比较,同样,Hybrid 的分析场相较于背景场都有明显的改进,3DVar和EnKF的分析场改进效果不明显。

图5 三组同化试验分析场的集合平均均方根误差的空间分布
3.2.2 分析场扰动能量分布
集合预报是估计数值预报中不确定的一种方法,其初始扰动方法是通过不同方式取样的概率密度函数,经过扰动随时间的发展,给出未来大气状态的概率密度函数。Toth 等[26]表示初始时刻分析场在增长型初始扰动叠加后产生的预报场与初始时刻分析场产生的预报场逐渐偏离,更能够代表大气真实状态的可能性。因此,在各种随机初始扰动中,增长型初始扰动可以更好描述初始分析场的不确定性。
本文采用干空气扰动总能量(DET)[27-28]来对三组方案的扰动特征进行描述,定义某个格点的扰动总能量为:

式中,u′、v′和T′分别表示水平风场和温度场的扰动,扰动值定义为集合成员预报和集合平均之差,Tr为参考温度(取值为270 K),CP为干空气定压比热(取值为 1 005.7 K/kg),i、j分别代表水平东西向和南北向的格点数,k为垂直层数。
图6 为三组同化试验分析场在500 hPa 高度的初始时刻扰动能量分布图,EnKF 同化和3DVar同化试验的初始扰动较为相近。在初始时刻,扰动的大值区主要分布在广西中北部、在广东福建交界沿海和广东中西部。结合后文分析的集合平均预报的降水空间分布可以看出,3DVar 和EnKF在广东福建交界的降水强度预报比Hybrid明显偏强,与广东福建交界沿海的扰动有很好的对应;Hybrid 在广西中北部和广东中西部的扰动中心与降水分布略有不同,以及三组试验的初始扰动对广东北部的降水中心也没有很好体现,说明初始扰动同样具有流依赖特性,随时间演变发生转移。
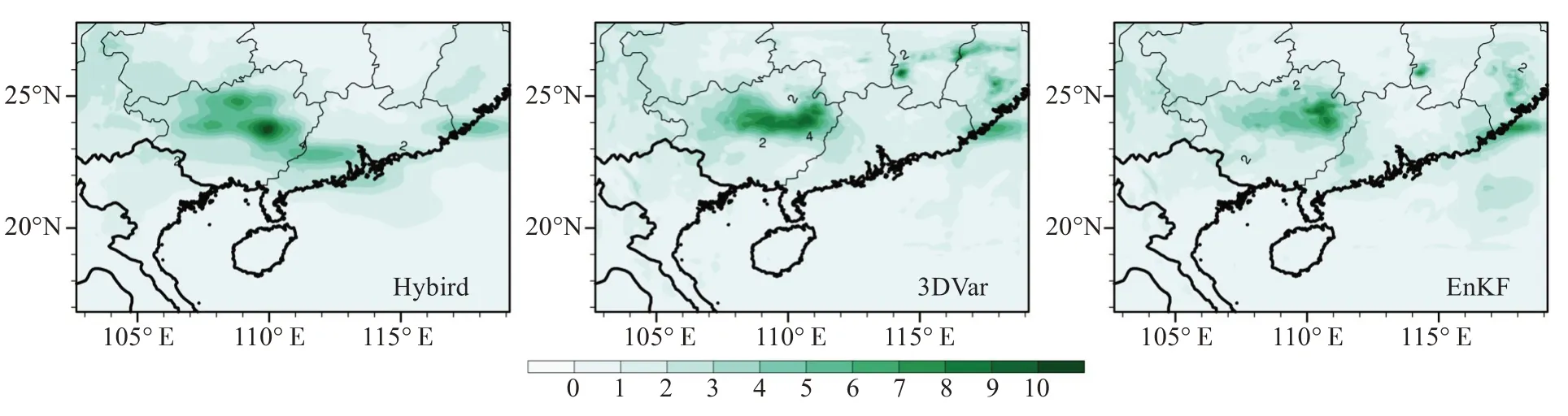
图6 三组同化试验分析场集合平均扰动总能量的空间分布
4 预报效果对比分析
4.1 扰动发展特征
图7 为四组试验在500 hPa 高度不同预报时效的扰动能量分布图,在 6 h 时,Ctrl 和 Hybrid 在两广交界有明显的能量扰动在发展,而3DVar 和EnKF 扰动能量则没有很好的发展。在12 h 时,3DVar 和EnKF 在粤北地区的扰动能量得到发展,Hybrid 和Ctrl 相较于6 h 前,扰动能量并没有得到很好的发展。同样在24 h 时,3DVar 和EnKF 的扰动能量的增长明显快于Hybrid 和Ctrl。在0~6 h的预报时段内Hybrid 和Ctrl 的扰动能量发展快于3DVar 和 EnKF,而在 12~24 h 的预报时段内,3DVar 和EnKF 的扰动能量发展明显快于Hybrid和Ctrl,这与24 h累积降水中心比较吻合。

图7 2019年6月10日06时起报的四组试验集合平均的500 hPa扰动能量随预报时效的演变
4.2 预报场误差分析
预报误差由模式预报相对于再分析资料的均方根误差所得。图8 为不同同化试验预报场在700 hPa 高度的气象要素预报误差时间序列图,负值表示同化试验相对于Ctrl 有改善作用。从整个预报时段看,3DVar的效果较好,其次是EnKF。值得注意的是,从不同高度层(图略)可以看出,预报时效在0~6 h,Hybrid 的预报误差小于其他三组试验,这与模式初值场的分析结果相一致,即Hybrid 好于 3DVar 和 EnKF。而在 6 h 以后,3DVar和EnKF 的预报误差整体上好于Hybrid,且误差值小于0,说明3DVar 和EnKF 对预报场有改善。Hybrid的四个气象要素误差基本在0值附近,说明Hybrid 从这个预报时段上与Ctrl 基本一致。3DVar 和 EnKF 对风场的预报:18 h 之前,误差都大于0,说明预报效果比Ctrl差,而在18 h 以后,误差小于0,说明预报效果好于Ctrl;而对于温度场和湿度场的预报都有类似特征,即随着预报时效的增加,预报效果转好。这与扰动能量发展有较好的一致性,即在0~6 h,Hybrid 的预报场更近于实况,而在 6 h 以后,3DVar 和 EnKF 的预报场开始得到改善,再往后预报则越接近实况。
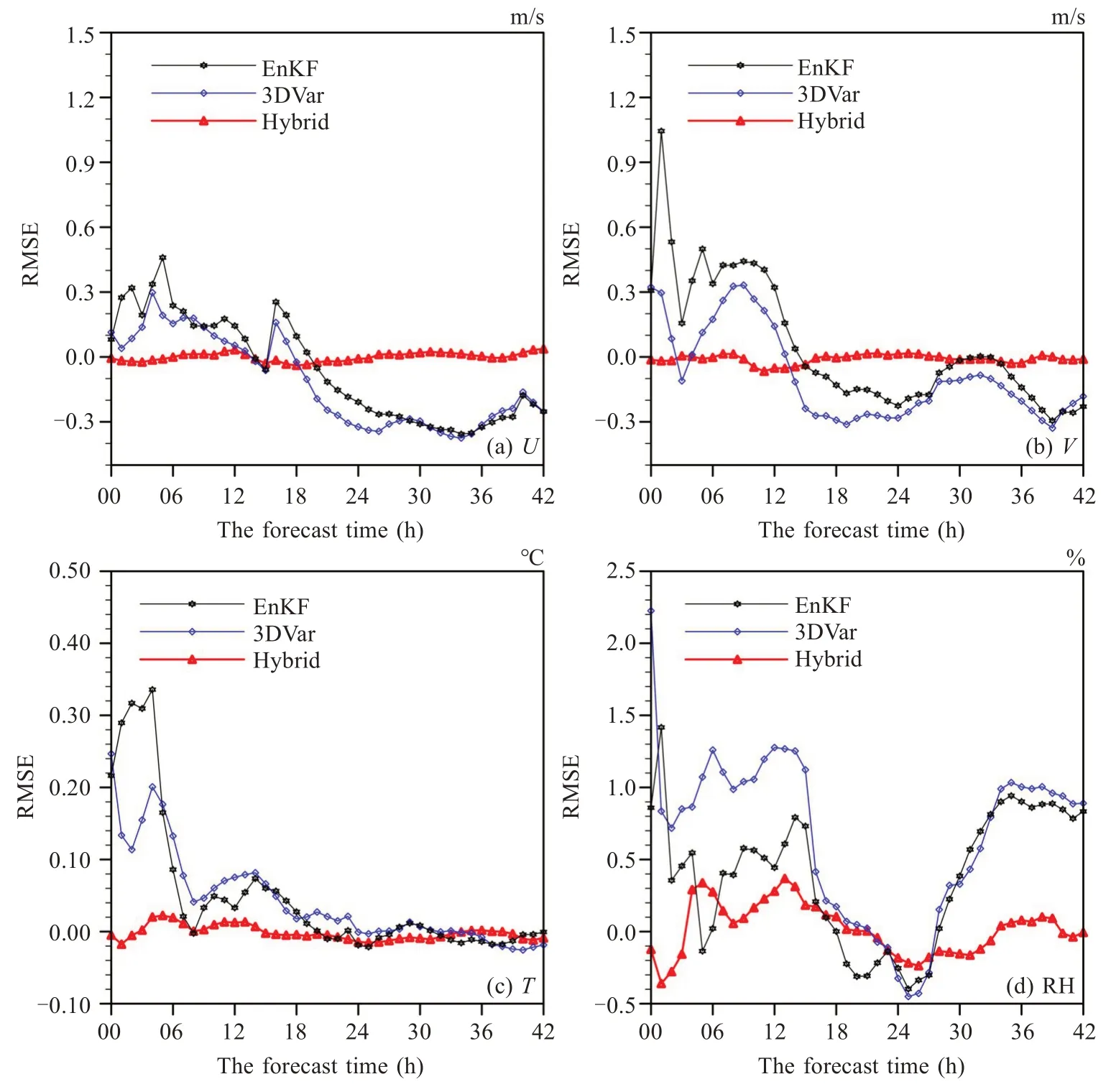
图8 2019年6月10日06时起报的三组同化试验700 hPa风、温度和湿度预报场的均方根误差与对比试验的差值随时间变化
4.3 降水分析
4.3.1 降水评分
为了对比分析不同试验对华南前汛期降水过程的预报效果,本文使用降水TS 和ETS 评分进行评估分析。公式如下:
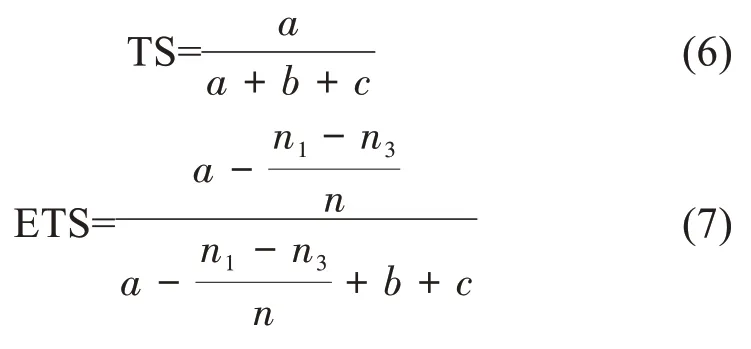
公式中a、b、c的定义由表3给出。
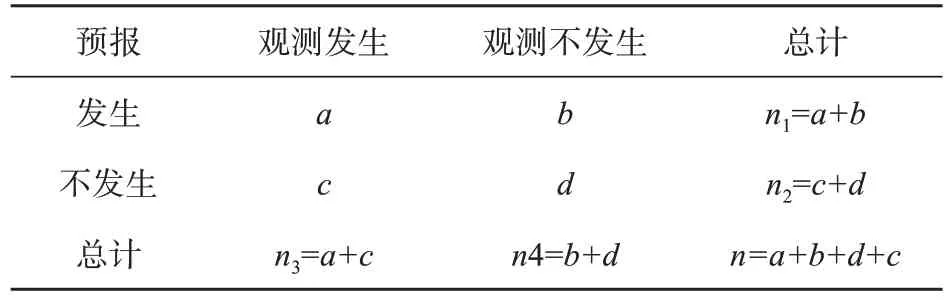
表3 预报观测列联表
针对集合平均预报0~24 h的累积降水量,其降水评分如图9 所示。在大于10 mm 的降水级别,无论 TS 评分还是 ETS 评分,3DVar 和 EnKF 比Ctrl 都有所提高,Hybrid 也略微好于 Ctrl,其中中雨(≥10 mm)和大雨(≥25 mm)级别的降水评分,3DVar 好于 EnKF,而暴雨(≥50 mm)和≥125 mm 级别的降水评分,EnKF 好于3DVar。整体上,3DVar和EnKF 的降水评分优于Ctrl,Hybrid 略微好于Ctrl,且3DVar 对大中雨级别的降水评分较好,而EnKF对暴雨以上级别的降水评分较好。

图9 2019年6月10日06时起报的四组试验的集合平均预报的0~24 h累积降水的TS(a)和ETS评分(b)
4.3.2 降水时空分布
从图10 可以看出,四组试验都能够较好地模拟出华南区域的雨带走向。对于降水中心的模拟,广东沿海的降水中心四组试验都没能模拟出来;而福建南部的降水中心,四组试验都能够模拟出来,Hybrid 和Ctrl 模拟出的降水中心强度偏弱;EnKF 和3DVar 模拟的降水强度偏强,而在粤北出现虚假降水中心。因此整体上四组试验对降水中心的模拟效果不够理想。此外降水空间分布的模拟效果整体上与降水评分结果有很好的对应。

图10 2019年6月10日06时起报的集合平均预报0~24 h累积降水空间分布图
4.3.3 降水离散度与均方根误差分析
集合预报在改进单一预报准确性的同时,还针对某一特定的预报系统来实时定量模拟该系统对任意气象要素随时间和空间以及天气系统而变化的可能预报误差的分布[29]。较好的集合预报系统的集合成员应尽可能地模拟出未来大气可能的真实状态,所以集合预报的扰动增长率应与模式预报均方根误差的增长率尽可能保持一致。集合离散度定义为集合成员与集合平均的距离之和,可以用来衡量扰动振幅和预报误差的分布。一个集合预报系统的可靠性可用集合离散度在整个预报时间内与集合平均预报均方根误差是否相等或者相近来衡量[30]。同时,集合离散度在一定程度上可以代表模式的预报技巧,即离散度越小,可预报性越大。
集合离散度公式:

预报均方根误差公式:

式中 obsi,t为第i个站点第t个时次的实况,M为站点数。
图11 给出逐3 h 累计降水集合离散度和预报均方根误差时间序列图,整个预报时段内预报均方根误差都随着集合离散度的增长而增加,说明集合预报能在一定程度表现出预报的不确定性,并且同化试验的集合平均均方根误差小于Ctrl 试验,说明同化试验对集合平均预报有一定的改善作用。Hybrid 同化试验的离散度略微小于Ctrl 试验,而 EnKF 和 3DVar 同化试验在 0~12 h 的离散度大于Ctrl试验。表明前12 h,Hybrid试验的预报技巧好于 EnKF 和 3DVar 试验,而在 12~42 h,EnKF和3DVar试验的预报技巧好于Hyrbid试验。
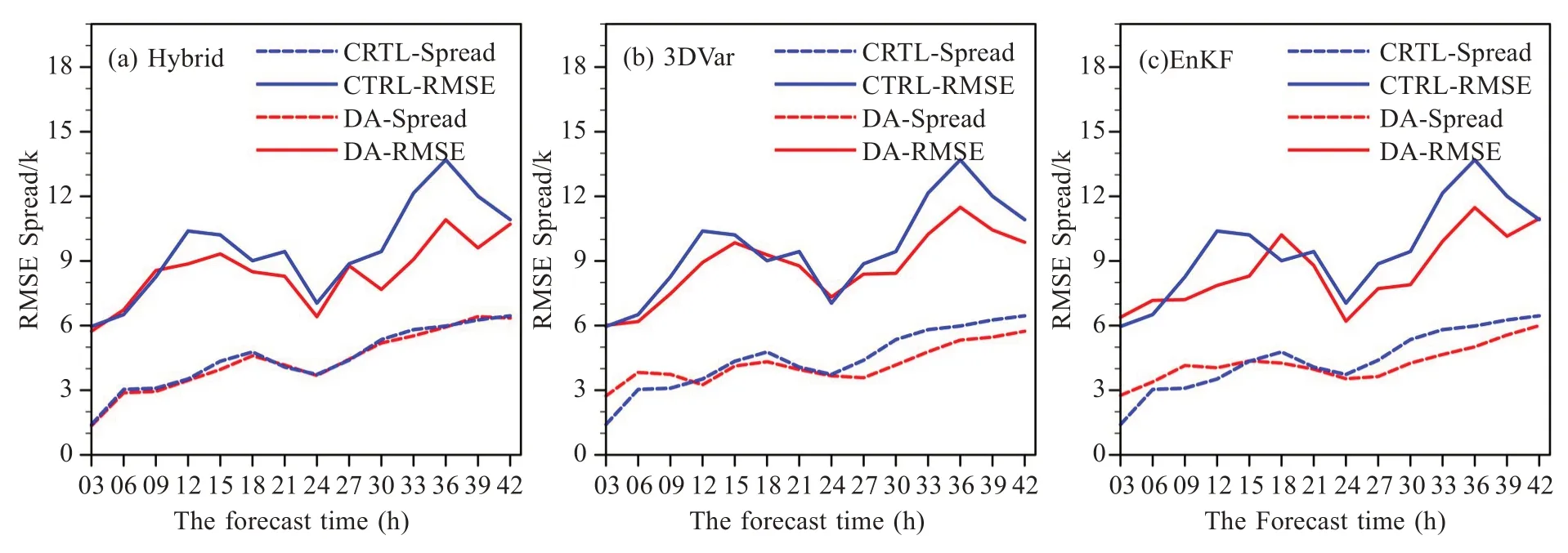
图11 四组试验逐6 h降水累积量的预报均方根误差和集合离散度随时间的变化
5 集合预报检验分析
5.1 ROC检验
ROC(the Relative Operating Characteristic)曲线是基于信号探测理论,针对某一格点或者站点,通过确定性预报二分类表判断一个事件是否发生的二分类检验方法[31]。根据表3 可以得出一次预报的假警报率F和命中率H。

对于确定性预报来说,只有一对命中率和假警报率,而对于有n个成员的集合预报来说则可以产生n对命中率和假警报率。ROC 曲线就是将不同概率分类所对应的命中率和警报率绘制成一条曲线,ROC 曲线下的面积就是AUC(Area under the curve of ROC)。ROC 曲线越靠近左上角,则集合预报对事件的预报技巧越好;相反,越接近对角线,预报技巧就越差。完美的集合预报系统,AUC值为1;没有技巧的预报,AUC值为0.5。
图12 为0~24 h 累计降水量大于50 mm 为事件发生的ROC 曲线图,Ctrl 的AUC 值明显小于其他三组试验,说明同化试验的预报技巧好于Ctrl试验。其中,3DVar 的 AUC 值为 0.745,Hybrid 的AUC 值为 0.731,EnKF 的 AUC 值为 0.669,Ctrl 的AUC 值为 0.656。此外,从表 4 可以看出,24 h 累积降水量阈值在 10~100 mm 的 AUC 值,3DVar 最好;而 125 mm 阈值的 AUC 值,EnKF 最好,这一结果与降水评分结果相吻合,即EnKF对强降水的预报技巧更好。
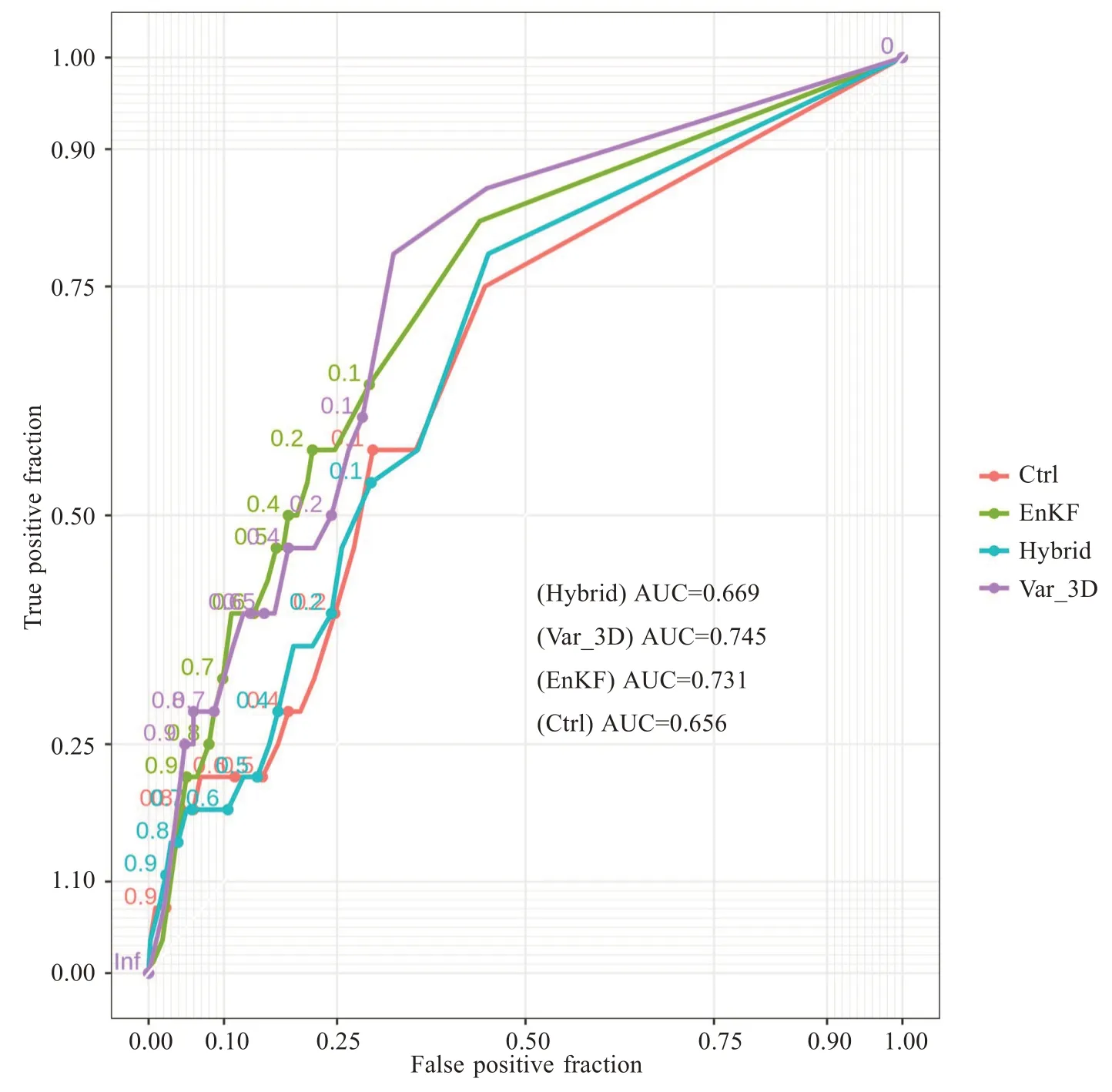
图12 2019年6月10日06时起报的四组试验的24 h累计降水量阈值为50 mm的ROC曲线图
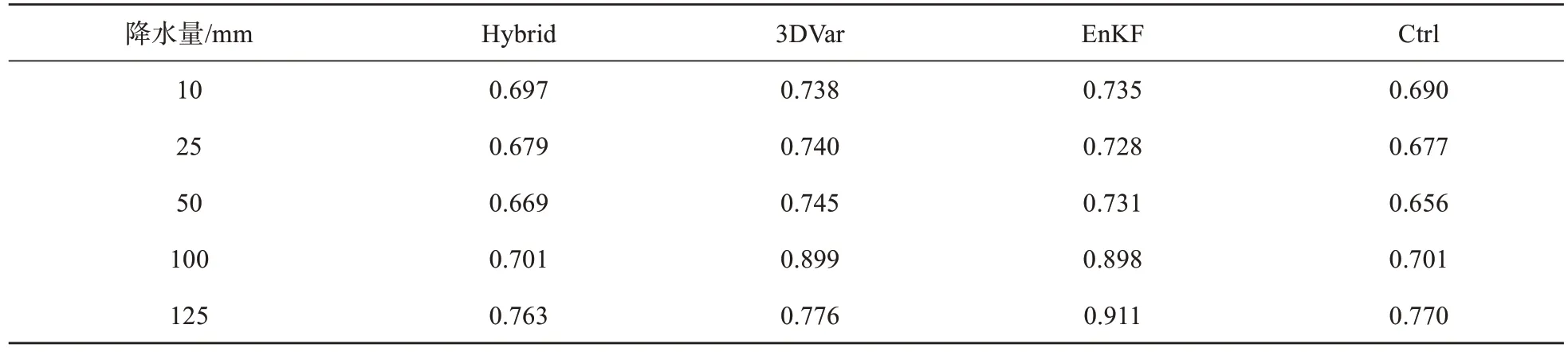
表4 2019年6月10日06时起报的四组试验的24 h累计降水量不同阈值的AUC值
5.2 Talagrand直方图
Talagrand 直方图[30]是将n个集合成员的预报结果在一个向量里从小到大进行排列,然后将所有观测值等机会地出现在n+1个箱子中的每一个箱子中。最后累计每个箱子中的观测点个数,从而得到均匀一致的直方图。通过上述方法来检验集合预报的离散度能否体现观测值的不确定性,从而进一步检验系统的可靠性。在Talagrand直方图中平直分布是理想的状态。“U”型分布表明系统离散度过小;“A”型分布表明系统发散过高;“L”型分布表明系统预报过量;“J”型分布表明系统预报不足。
当样本数达到一定数量时,检验观测值在每个区间发生的频数Si,则该区间的频率Pi:
概率均方根误差Q则反映每个预报等级实际发生的频率和理想频率之间的差距。即Q值越小,直方图分布越趋于平直,离散度分布越合理[32]。

式中表示每个等级间所有成员所发生的平均频率。
从图13 可以看出,四组试验预报对U风场的Talagrand 直方图分布效果更好,即U风场的离散度更能够体现观测值的不确定性,其次是温度场和湿度场,两者表现相当,而V风场的直方分布比较不理想。其中U风场、温度场和湿度场的直方图分布呈“L”型分布,表明集合预报系统对温度有预报过量的偏差特性,对V风场的直方分布图呈“J”型,说明集合预报系统对V风场有预报不足的偏差特性。
由表5 可以看出,对四个气象要素的预报,U风场的概率均方根误差3DVar最小;V风场和湿度场是 Ctrl 的Q值最小;温度场是 Hybrid 的Q值最小。值得注意的是:对于U风场四组试验的Q值表现相当,而其他三个要素,Ctrl 和Hybrid 表现相当,即Q值比较接近,即整体上,Ctrl和Hybrid的Q值小于EnKF和3DVar。
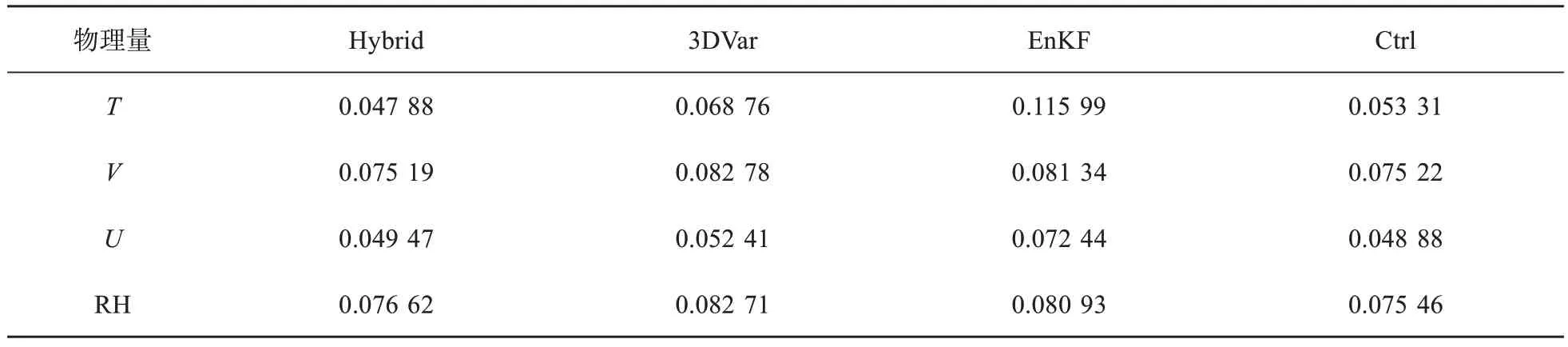
表5 第24时预报场的U风、V风、温度和相对湿度的概率均方根误差表
6 总结与讨论
采用集合滚动预报方法,针对华南的一次降水过程,展开了未同化观测资料的对比试验与同化了葵花8卫星资料、GDAS资料和常规观测资料的同化试验的对比分析,通过对比不同同化试验模式初始场、降水模拟、集合预报统计检验等,综合分析了四组试验的预报结果,得出以下结论。
(1)通过对比三组试验同化分析场的风、温度和湿度三种气象要素增量,表明Hybrid 能够较好改善大气的风场、温度场和湿度场,与大气的实况观测更为吻合;从对比分析三组同化试验初始场的均方根误差中可以看出,整体上Hybrid 同化后的分析场相对于背景场的改进效果较明显,而Ctrl和EnKF的分析场改进效果不明显。
(2)从集合扰动能量的发展中可以看出Ctrl和Hybrid在0~6 h预报时效在两广交界的扰动能量发展好于 3DVar 和 EnKF,在 6 h 以后 3DVar 和EnKF 的扰动能量发展好于Hybrid。扰动能量随预报时效的发展状况与不同高度的预报场误差随时间的分布也具有较好一致性,即在0~6 h,Hybrid 的预报误差小于3DVar 和EnKF,但在6 h以后,3DVar 和EnKF 的预报误差得到改善,且在12~18 h 四个气象要素的误差开始好于Hybrid 和Ctrl。
(3)对于降水模拟的分析,从24 h累计降水的评分中可以看出,3DVar 和EnKF 的降水评分优于Ctrl,Hybrid 略微好于 Ctrl,且 3DVar 对大中雨级别的降水评分较好,而EnKF对暴雨以上级别的降水评分较好;对于集合统计检验分析,同化试验的AUC 值都大于Ctrl 的AUC 值,表明三组同化试验的预报技巧好于Ctrl。24 h 累积降水量阈值在10~100 mm 的 AUC 值,3DVar 最好;而 125 mm 阈值的AUC 值,EnKF 最好,这一结果与降水评分结果相吻合,即EnKF对强降水的预报技巧更好。
本文试验结果表明,在针对华南一次前汛期降水数值模拟中,Hybrid 同化试验对模式初始场的改进效果明显好于3DVar 和EnKF,这在0~6 h的预报中也得到验证。而在6 h 以后的预报中,3DVar 和EnKF 的预报结果逐渐好于Hybrid,并且相对于Ctrl 有明显的改善。对于这一结果,今后仍需要进行大量的工作,进一步分析在6~42 h的预报中3DVar 和EnKF 为何好于Hybrid,探讨不同同化方案对区域集合预报的具体影响,例如通过不同同化方案产生的区域集合预报初始扰动具体怎么传播,Hybrid 混合系数是否最优以及华南强降水对大尺度集合预报信息的敏感程度等。同时,由于考虑到集合预报个例所需计算资源较大,本文仅进行了一个华南前汛期个例试验,因此本文的试验结果和结论需要更多的试验进行验证,特别是针对不同地区,试验的结果是否保持一致也有待讨论,例如南北方降水机制不同等因素可能造成试验结果的差异也需进一步讨论。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
成都信息工程大学学报(2021年5期)2021-12-30 06:25:16
能源(2017年8期)2017-10-18 00:47:39
自动化学报(2017年2期)2017-04-04 05:14:28
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
通信电源技术(2016年1期)2016-04-16 04:57:35
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
新高考·高二数学(2014年7期)2014-09-18 17:20:45
中国科学技术大学学报(2013年8期)2013-03-11 20:18:37
