无人机宽带数据链中的高阶调制技术研究
2022-04-21 07:19梁保卫王利平涂海洋郑轶文
无线电工程 2022年4期
梁保卫,王利平,涂海洋,郑轶文
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.空装驻石家庄地区军事代表室,河北 石家庄 050081;3.南京林业大学 理学院,江苏 南京 210037)
0 引言
随着航空技术以及军事装备的发展,无人机(Unmanned Aerial Vehicle,UAV)作为一种远程可操控的航空器,具有质量轻、体积小和使用便捷等特性,在各个方面都发挥着非常重要的作用[1]。
无人机数据链是实现地面控制系统与机载平台实时、可靠与稳定通信的重要手段,能够传递地面遥控指令,遥测接收无人机飞行状态和传感器获取的情报数据,同时实现无人机机群内部间的高效战术协同[2-3]。
随着无人机侦察信息技术的飞速发展[4],无人机平台搭载的传感器种类和数量不断增多,所获取的图像视频等信息数据庞大,同时侦察信息需要及时传回地面进行处理。因此,无人机数据链系统需要不断提高宽带传输能力,以满足日益增长的数据传输需求。
由于功率资源、频谱资源的限制,传统的无人机数据链系统都采用BPSK,QPSK等恒包络调制信号[5],但随着无人机数据链系统容量的不断提高,带宽资源趋于紧张,为了进一步提高频带效率,在信号传输中需采用高阶调制技术。
本文首先针对无人机数据链系统特点,分析了适用于无人机宽带数据链系统的高阶调制体制,然后研究了该高阶调制体制接收机关键技术,提出了一种适用于无人机宽带数据链高阶调制体制的定时、载波同步方案。最后,基于Matlab平台对定时、载波同步方案进行了性能仿真,验证了所提方案的有效性。
1 高阶调制技术体制选择
无人机数据链系统具有典型的功率受限性,要求所用调制方式的包络恒定或起伏很小,因此无人机数据链系统常采用相移键控(PSK)调制[6]。随着无人机数据链信息传输速率的不断提高,频谱资源趋于紧张,使用代价也越来越昂贵。为了提高频带效率,在信号传输中可以采用幅度与相位结合的高阶调制技术。
传统的矩形QAM调制,其调制信号包络起伏大,峰均比较高,所以其功率效率不高,且存在对非线性失真敏感的问题,而星座形状呈圆形的APSK调制,其幅值数量较QAM调制少,抗饱和非线性失真的能力更强[7],具有更小的峰均比,如当滚降因子为0.5时,16APSK的峰均比约为3.99 dB,16QAM的峰均比约为5.30 dB;64APSK的峰均比约为4.78 dB,64QAM的峰均比约为6.07 dB。若从此角度考虑,MAPSK无疑是无人机宽带数据链高阶调制体制方案的首选。
16APSK,32APSK和64APSK的DVB-S2建议星座图[8]如图1所示。

(a)16APSK
2 高阶调制接收机关键技术
2.1 定时同步技术
在数字通信系统中,为了恢复发送信息,需要在接收端用与发送端相同的时钟对匹配滤波器的输出进行周期采样。在接收机中,发送机到接收机的传播延时一般是未知的,因此参考时钟的差别或漂移将产生严重的误码。为了对解调器输出同步抽样,必须从接收信号中导出符号定时,称为符号同步或定时同步[9]。
传统闭环定时同步信号处理流程如图2所示。其中,定时误差检测算法采用的是Gardner算法[10-11],该算法是Gardner针对BPSK/QPSK解调于1986年提出的一种定时误差估计方法,其定时误差估计如下:
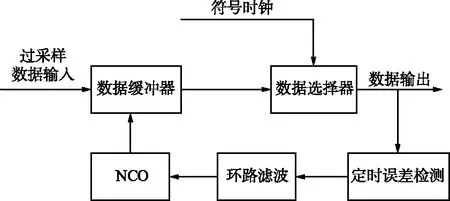
图2 传统闭环定时同步信号处理流程
(1)
该估计方法并不能直接用于APSK这种幅相联合调制信号,需稍加修改:
[xI(k)-xI(k-1)]+
[xQ(k)-xQ(k-1)]。
(2)
根据式(2)进行APSK的多电平信号定时误差检测,并不能准确地提取瞬时定时误差,这些错误的定时误差平均值为0,会引起NCO时钟抖动[12],导致闭环性能不稳定,甚至无法收敛。
此外,图2所示的闭环定时同步结构存在收敛速度慢、不利于高速并行实现等问题。
针对以上问题,提出了一种4路并行开环定时同步方案,其信号处理流程如图3所示。

图3 4路并行开环定时同步信号处理流程
处理步骤如下:
(1)数据缓冲器
数据缓冲器用于补偿定时误差估计的计算时延,利用移位寄存器实现。
(2)定时误差估计
定时误差估计采用O&M算法[13-14],其是由Oerder.M和Myer.H提出的一种数字滤波平方算法,大致可以描述为:
设接收到的基带信号为rk,按实部虚部表示为:
rk=Ik+jQk,
(3)
包络平方序列xk可以表示为:
(4)
将xk按每L个符号周期分为一段,则通过DFT变换可得到第m段数据频谱上的符号速率谱线的谱分量为:
(5)
则此谱分量的归一化相角就是定时误差的无偏估计,即:
(6)
根据定时误差估计结果可以计算出插值输出位置mk以及插值相对位置μk:
(7)
(8)
本文中N=4,满足采样不混叠的要求,L=1 024,满足估计精度10-5的要求。在此参数条件下,4路并行定时误差估计实现结构如图4所示。

图4 4路并行开环定时同步实现框图
(3)并行内插
内插滤波器主要实现定时误差校正功能。常用的内插函数有简单的线性内插函数、拉格朗日高阶多项式内插函数等。线性内插只需2个样值点参加运算,而拉格朗日高阶多项式内插,则需要多个样值点参加运算。当误码率为10-6时,拉格朗日内插器性能要优于线性内插器0.05 dB[15],该指标对系统性能的影响很小,所以本文选择线性内插器,同时,可以进一步降低算法工程实现复杂度。
线性内插计算式为:
r=(1-μk)r0+μkr1。
(9)
在并行插值输出时,有2种特殊情况需要考虑:
① 当解调器采样周期大于码元周期时,在mk由0向3过渡时会有2个插值输出;
② 当解调器采样周期小于码元周期时,在mk由3向0过渡时没有插值输出。
针对这2种特殊情况,本模块输出包含2路数据使能和2路数据。
(4)使能数据合并
本模块主要通过FIFO实现2路数据使能,2路数据向1路数据使能、1路数据的合并,以便于后续的信号处理。
本文所述定时同步方案,适用高阶MAPSK调制体制,此外,相比传统方案,采用并行、开环数据处理,收敛速度快,系统时延小,适合于高速数据传输。
2.2 载波同步技术
数字通信系统中,MAPSK信号一般采用相干解调以获得更好的误码性能。相干解调要求在接收端恢复与发送端同频同相的相干载波,否则会使系统性能下降,恶化误码性能,甚至无法通信[16]。使收发端载波完全同频同相的过程称为载波同步[17]。
文献[18]提出了一种基于精简星座鉴相的大频偏APSK信号载波同步方法,该方法的本质是对接收到的信号进行N次方运算(16APSK:N=3;32APSK:N=4;64APSK:N=7;),将其变成QPSK信号,再利用经典的COSTAS环完成载波同步。该方法存在2点不足:
①N次方运算:放大了接收噪声,使鉴相结果的有效性变差;
②N次方运算:硬件实现复杂、运算延时大,同时需要大量的乘法器资源,不利于工程应用。
文献[19]提出了一种鉴频鉴相算法(PFD),该算法在低阶APSK信号上效果非常好,但是随着APSK调制阶数的提高,矩形窗口越来越小,鉴频作用变弱,性能有所下降。
为了增大频偏捕获范围,提高载波相位跟踪精度,本文提出一种载波同步方案,其信号处理流程如图5所示。

图5 载波同步信号处理流程
载波同步方案包含载波频率同步与载波相位同步2部分。载波频率同步主要完成载波频偏的捕获与补偿;载波相位同步主要完成载波相位的捕获、补偿和跟踪。
(1)载波频率估计
本文的信道帧结构中包含2段相邻的PN序列,将其进行自相关运算,可以得到相邻2段PN序列之间的相位差,而相位差为载波频偏的时间累积量,通过运算可以得到载波频偏估计:
(10)
式中,x为接收到的PN序列;N为PN序列周期。
由于反正切函数的范围为(-π,π),所以频偏的估计范围为(-1/(2TsN),1/(2TsN)),其中Ts是符号速率。本文中N=32,Ts=200 Ms/s,所以可捕获最大频偏为3.125 MHz。
(2)载波相位估计与跟踪
由于APSK星座由多个圆构成,可以看作多个MPSK调制星座的组合,其鉴相值为[20]:
(11)
式中,yk为载波相位补偿模块输出;M为各圆星座点数的最小公倍数。
式(11)中的M次方非线性运算不仅增强了噪声的影响,同时计算法复杂度高,不适用于工程实现。为了方便工程实现,本文鉴相值为:
(12)
环路滤波采用经典的2阶数字环路滤波,其中环路带宽为50 kHz,系统时钟为200 MHz。
本文提出的载波同步方案既可以满足大频偏捕获范围,又可保证载波相位的跟踪精度。
2.3 仿真分析
为了验证所提方案的可行性,本文在AWGN信道下对关键技术实施方案进行了仿真,其中定时偏差为2%的符号速率,载波偏差为2.4 MHz,解调星座图如图6~图8所示。其中,对于16APSK,Eb/N0=15,BER≈1×10-6;对于32APSK,Eb/N0=18,BER≈1×10-6;对于64APSK,Eb/N0=19,BER≈1×10-6。
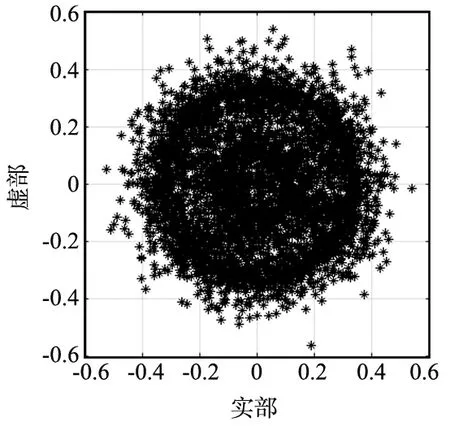
(a)定时同步前

(a)定时同步前

(a)定时同步前
由仿真结果可见,即使系统存在定时偏差、载波偏差时,采用前文所述的定时同步方案和载波同步方案,系统解调性能与理论值基本接近,验证了所提方案的可行性和有效性。
3 结束语
信息技术的快速发展对无人机数据链的传输能力要求越来越高,综合考虑无人机平台功率受限、体积受限和带宽受限等特点,本文进行了高阶调制技术在无人机宽带数据链中的应用研究,从功率利用角度出发,MAPSK调制体制具有明显优势,是一种适用于无人机宽带数据链的高阶调制体制。针对MAPSK调制体制特点,提出了一种适用于该体制的高速并行定时、载波同步方案,并对方案进行了Matlab仿真验证。随着未来无人机宽带数据链的快速发展,研究成果具有一定的参考、借鉴意义。
猜你喜欢
包装工程(2022年9期)2022-05-13
中国空间科学技术(2021年1期)2021-03-16
军民两用技术与产品(2021年10期)2021-03-16
北京航空航天大学学报(2019年9期)2019-10-26
当代陕西(2019年7期)2019-04-25
兵器知识(2018年9期)2018-09-18
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20