
基于水肥药一体化智能灌溉系统的研究
2022-04-21 01:39:28河北北方学院信息科学与工程学院颜钰史婷婷曹雪萌刘钰
河北农机 2022年3期
河北北方学院信息科学与工程学院 颜钰 史婷婷 曹雪萌 刘钰
引言
水肥药一体化智能灌溉系统设计主要分为硬件设计和软件设计两大部分。在硬件部分中,终端节点主要依靠传感器、水肥药一体机及渗灌系统进行实现,各节点间通过Zigbee 无线传感网络连接,控制部分由ARM嵌入式系统完成;在软件部分中,与权威数据模型进行算法分析与匹配,从而使渗灌系统做出正确的判断。系统总设计原理图如图1 所示。

图1 总设计原理图
1 系统设计与实现
1.1 硬件系统设计
1.1.1 传感装置
传感装置主要由土壤温湿度传感器、土壤PH 值传感器、土壤元素分析传感器、土壤养分传感器和空气温湿度传感器共同组成。
土壤温湿度传感器及空气温湿度传感器分别负责监测土壤和空气中的水分和温度,使植物始终能在适宜的温度和湿度下生长。土壤PH 值传感器检测土壤酸碱度,确保土壤酸碱度保持在植物适宜生长的范围内。土壤中无机物含量是植物生长过程中的重要参考因素,因此需要土壤养分传感器检测土壤是否贫瘠,土壤元素分析传感器监测土壤中氮磷钾含量是否能使作物正常生长。
1.1.2 阀门控制器
在水肥药一体智能灌溉系统中阀门控制器接收到信号后远程开启输水系统的电阀门,给渗透系统提供所需要的水资源,当水分足够时,阀门控制器关闭电阀门,停止对渗透系统水资源的输送。
1.1.3 渗灌系统
植物对水分、养分和农药的吸收主要是在根部进行,因此智能化灌溉系统主要采用渗灌的灌溉方式。图2 为渗灌系统的总设计图。该种灌溉方式可以减少外部因素(如刮风、下雨等)对灌溉位置、灌溉浓度的影响,实现精准灌溉的同时减少水肥药的损失量,增加水肥药的利用效率。
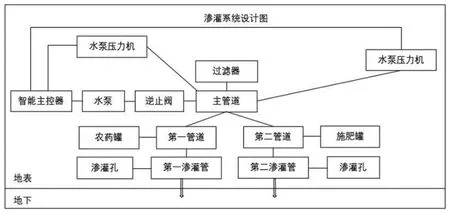
图2 渗灌系统的总设计图
渗灌系统主体位于地表,用户根据农田面积大小选择安装适宜型号的水泵和压力机。服务器依据传感器传入的数据进行判断,由ARM 智能主控器按照式(1)自动配比水肥药的比例,并控制水泵压力机进行灌溉操作。水肥药配比公式为:

其中,μ 为需要的水肥或水药浓度,F 为浓水肥或水药液体的流量,C 为浓水肥或水药液体的浓度,li为主供水管路清水的流量。
为防止肥料与农药中的成分发生化学反应而影响使用,系统使用不同的管道将二者分别进行输送,即:水和肥料通过第一渗透管渗透至地下,水和农药通过第二渗透管渗透至地下,最终达到水肥药并施的目的。输水管(包括各管道和渗透管)采用高分子聚乙烯塑料,该种材料具有常温下不溶于目前所知的任何溶剂或酸碱,其稳定性可保证不同浓度肥料和农药的输送。
1.2 软件系统设计
1.2.1 软件设计概述
软件设计方面分为智能化自动灌溉和人工灌溉两种模式,智能化灌溉依据作物适宜生长的数据进行水肥药自动配比,并通过外围设备进行灌溉;人工灌溉即用户可通过软件观察可视化数据,实时监测农田情况,自主决策水肥药配比并远程操控外围设备进行灌溉。
1.2.2 软件功能概述
软件的功能主要分为控制、历史数据查询和实时监测三部分,用户可根据实际情况及天气状况选择智能化自动灌溉或手动配比水肥药进行远程灌溉。历史数据查询功能可将反馈给后台的数据进行可视化处理,给用户更加直观、清晰的体验,同时用户可对比数据信息对作物生长情况进行判断。监测功能主要包括土壤墒情信息及设备状态信息监测,如出现设备问题或其他不利于作物生长的影响因素,系统则会告知用户,让用户及时做出相应判断。
1.2.3 控制算法概述
(1)模糊控制算法
水肥药灌溉配比输出采用模糊控制算法,如图3所示。

图3 模糊控制
模糊规则具有自主学习能力,使模糊控制器能够根据设定好的水肥药配比智能化地配置水肥药的浓度。在模糊规则的影响下,模糊控制器对已获得的数据进行模糊决策,智能灌溉系统在得知目标配比额限制条件后,模糊控制器先对数据进行模糊寻优的操作,而后系统将得到的数据进行去模糊化处理,将计算和推理所得到的模糊值转换为明确的控制信号,作为灌溉系统的输入值。执行器利用模糊计算所得到的控制信号控制渗灌系统完成渗灌操作,而受渗灌系统操作影响的土壤墒情数据实时反馈回来,作为反馈输入实时影响着模糊决策的制定,从而实现系统的自主循环控制。
(2)PID 与积分饱和算法
所谓积分饱和就是指系统存在一个方向的偏差,PID 控制器的输出由于积分作用的不断累加而扩大,从而使PID 控制器的输出超出正常范围并不断增大,进入饱和区。在本项目中,当所反馈的数据进入饱和区后。为解决积分饱和的问题,我们采用抗积分饱和的PID算法,使数据退出饱和区。PID 算法功能框架图,如图4所示。

图4 PID 算法功能框架图
对于系统水肥药排出量和排出比例的控制,我们采用积分饱和的方式对其进行调控,在控制过程中,采用PID 算法,即利用反馈检测偏差信号的算法,通过偏差信号来控制被控变量。其原理如式(2),即在计算变量U(k)时,先观测上一时刻的变量U(k-1)是否超出了限制范围。若U(k-1)>U限制,则只累加负偏差;若U(k-1)<U限制,则只累加正偏差。当土壤墒情传感器传出的数据超过系统的极限值,且仍然不能消除偏差时,由于积分的作用,尽管PID 差分方程式(如式3)所得的运算结果(即水肥药在土壤中的含量)继续增大或减小,但系统不会继续进行灌溉和配比操作。除离散式PID控制以外,我们还需要进行增量式PID 控制(如式4),通过对本次所观测的水肥药比例与上次观测到的比例求差值,计算其增量,从而进行控制,增加其准确率。PID 算法中积分通过偏差的累计抵消系统的静差,微分对偏差的变化趋势做出反应。使用PID 算法进行比例控制可以使系统根据偏差的变化趋势实现水肥药配比的超前调节,提高系统的反应速度,避免了控制变量长时间停留在饱和区,使系统能够对反向的偏差进行快速的响应,从而大大提高了系统的灵活性。
PID 控制原理公式如下:

其中,t 为特定时刻,U (t) 为PID 控制器的输出信号,此时数据输入量为rin(t),数据输出量为rout(t)且均为观测值,偏差量err(t)=rin(t)-rout(t),TD为微分时间。
PID 差分方程式(离线形式)如下:
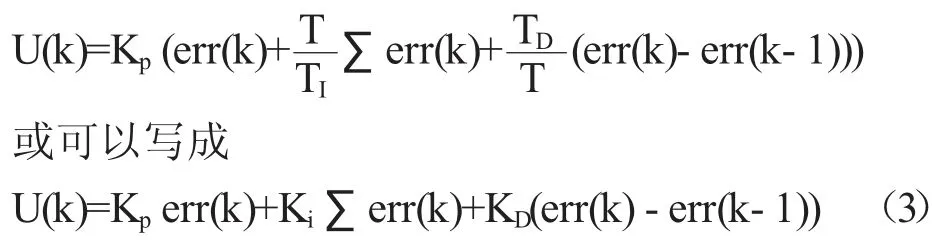
其中U(k)为PID 控制器的输出信号,Kp为比例带,KI=Kp*T/TI,KD=Kp*TD/T,T 为系统采样周期,TI为积分时间,TD为微分时间,err(k)为 k 时刻的偏差量,err(k-1)为上一时刻(k-1 时刻)的偏差量。
PID 增量方程式如下:

其中△U(k)为PID 控制器输出信号的增量,存在△U(k)= U(k)-U(k-1),Kp为比例带,KI= Kp*T/TI,KD=Kp*TD/T,err(k)为 k 时刻的偏差量。
2 网络传输系统
水肥药一体化智能灌溉的外围设备采用C/S 架构,C/S 架构的交互性、安全性、处理信息的能力强且信息处理速度较快,更利于大量数据的传输和处理。5G网络则应用于Zigbee 主节点和客户端之间的通信,实现人机交互。ZigBee 终端节点将采集到的土壤墒情数据,通过Zigbee 传输网络汇集到主节点的ARM 处理中,进而通过5G 网络将数据传送给客户端,客户端器将处理数据反馈给渗灌系统的智能主控制器,进行水肥药配比计算,形成控制指令使渗灌系统发出响应,以达到远程灌溉的目的。
3 数据分析
统计作物适宜生长条件是实现水肥药一体化智能灌溉系统的理论基础。为了精准施肥、洒药,表1、2 以常见作物为样本对其各方面数据进行统计和整理。
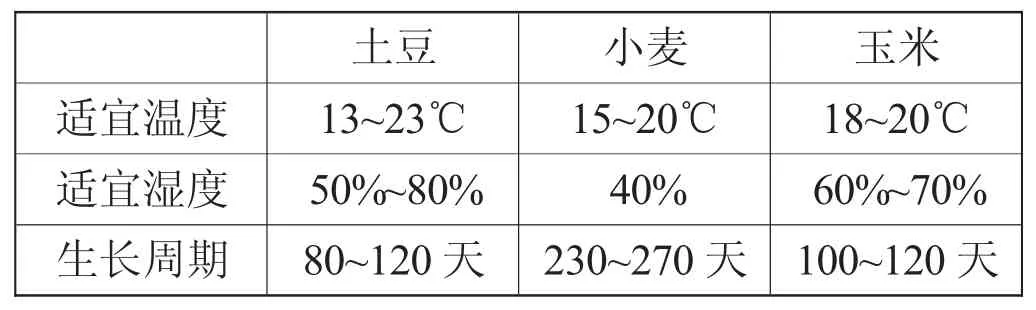
表1 统计常见作物适宜生长的条件

表2 常见作物适宜使用的肥料及配比
土壤一般性标准,氮 140~225,磷 57~100,钾106~150,单位是毫克/公斤。土豆适宜的土壤类型为中性偏酸性土壤,PH 值在6.5~7.5 之间,幼苗期对氮磷钾的吸收率分别为17%、14%、13%,1 吨马铃薯块茎需要在土壤中吸收氮5kg、磷2kg、钾11kg,我们已建立的模型中土豆重量为500g,因此经过计算可知需要土壤中的氮磷钾含量分别为2.5g、1g、6g。
水肥药一体化智能灌溉系统将个性化参考常见作物的生长周期,制定有规律、更科学的水肥药渗灌浓度、渗灌周期。智能灌溉系统分别根据不同的适宜生长条件对水肥药进行配比,当传感器反馈土壤墒情信息不符合作物生长的适宜条件时,服务器将控制外围设备进行渗灌处理,直到土壤墒情值达到系统的预期指标后再停止灌溉。
4 结论
水肥药一体化智能灌溉系统主要以ZigBee 无线局域网技术为基础进行数据传输,可以远距离接收外围设备发送的数据,具有扩展性强、可移动性强、设备简单、性价比高等优点。该系统通过土壤墒情传感器检测土壤基本信息,依据设置的阈值实现全自动水肥药地下渗灌,使资源利用率提高,作物产量增多。
猜你喜欢
中国化肥信息(2022年8期)2022-12-05 20:01:27
今日农业(2022年3期)2022-11-16 13:13:50
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
湖北农机化(2020年4期)2020-07-24 09:07:14
电子制作(2018年23期)2018-12-26 01:01:10
中国农资(2018年25期)2018-08-07 08:21:48
通信电源技术(2018年3期)2018-06-26 08:06:18
现代园艺(2018年2期)2018-03-15 08:01:10
系统医学(2016年8期)2016-02-20 02:55:08
