
检焦系统中基于改进Sobel算子的图像清晰度评价函数研究
2022-04-20 07:24邹雨彤罗一涵
电子设计工程 2022年7期
邹雨彤,谭 毅,罗一涵
(1.中国科学院光束控制重点实验室,四川成都 610209;2.中国科学院光电技术研究所,四川成都 610209;3.中国科学院大学光电学院,北京 100049)
在光学系统装调完毕的运行过程中,常常由于气压、温度、高度等变化而造成系统离焦[1],调焦系统应运而生。高精度的实时调焦系统是提高光学系统成像质量的有效保证,可靠的检焦技术则是系统准确调焦的前提和关键。随着现代光学系统的发展,光学成像系统逐渐趋于自动化和轻量化,对于检焦系统的自动采集分析能力、实时性以及灵活性等要求都越来越高;光学成像系统的检焦技术也从最初的预先标定法发展到光电自准直法,再到如今普遍采用的图像检焦方法[2-3],实时性、灵活性以及精度逐步提高[4]。基于图像的检焦方法摆脱了对辅助设施的依赖,方便灵活且具有较好的实时性,该方法直接对光电成像元件上的图像进行像质分析,通过图像的清晰度函数评价值来评判系统当前的对焦状态,从而指导调焦工作。而图像清晰度评价函数的核心在于提取图像中的灰度边缘细节或高频分量信息,以此来表征图像的离焦程度。
空域类、频域类、信息学类、统计学类清晰度评价函数是常用的4 类清晰度评价方法[5]。文献[6]通过对各种梯度算子进行仿真比较,总结出各种算子的特性,其中Sobel 算子和Canny 算子的边缘检测效果较好,可探测到更多图像细节;文献[7]通过对比标准差、梯度函数算子、直方图统计等方法对红外图像的检焦性能进行分析,发现灰度梯度函数具有较好的检焦精度、实时性和适应性。多年来,科研人员针对图像清晰度评价算子尝试了各种改进,文献[8]使用灰度差分算子并结合大步长粗寻与小步长精寻,成功减小了计算量,检焦速度和精度由此得到提升。但是由于成像系统中的加性噪声无法避免,以及受成像环境的照度影响,各种图像清晰度评价函数仍然存在易受干扰的问题[9],因此基于图像的检焦清晰度评价函数在灵敏度和抗噪性能方面仍需提升。
文中首先对基于图像的检焦评价方法中各类清晰度评价函数进行了分析,在4 类基本清晰度评价方法里选择了应用广泛的基于空域的清晰度函数进行改进[10-11],以此为基础对基于Sobel 算子的检焦清晰度评价函数提出了改进,旨在提高检焦系统中清晰度评价函数的灵敏度和稳定性;然后进行了仿真实验,对图像清晰度评价曲线的单峰性、无偏性、抗噪性以及灵敏度[12]等性能进行了验证。实验结果表明,文中方法在系统轻度离焦时仍具有较高的灵敏度,并且拥有良好的抗噪性能,结果显示在椒盐噪声和高斯噪声的不同影响下,该方法的清晰度评价曲线都能保持较好的稳定性。
1 基于图像的清晰度评价方法基本原理
检焦系统的关键在于如何可靠地找到系统当前状态与准确聚焦时的差距,基于图像的检焦方法则是以图像清晰度评价曲线为判断依据,具体表现为对焦准确的清晰图像包含更多细节信息,边沿尖锐易于分辨,空域中的像素间灰度梯度对比更明显,频域中的高频分量更多,对应的检焦清晰度评价值更大;而离焦时的图像像素边沿模糊不清、不易区分,空域中的像素间特征值变化减弱,频域中高频分量减少,对应的清晰度评价结果相对较小。各类清晰度评价算法所采用的算子模板各有差异,但实质都在于加强待检图像像素间的灰度梯度或高频信息分量[13],旨在建立具有单峰性、无偏性、稳定性和良好灵敏度的评价函数曲线[12]。
1.1 常用的各类清晰度评价方法
常用的各种清晰度评价函数[14]包括梯度向量模函数、Roberts 函数[15]、Brenner 函数、TenenGrad 函数、Laplacian 函数、Varaince 方差函数、基于离散傅里叶变换(DFT)的图像清晰度评价函数等。
其中,TenenGrad 函数运算速度快,得到的清晰度评价曲线光滑连续,并且通过突出尖锐边缘细节分量运算加强了梯度信息[10],得到了广泛的应用。
该函数采用Sobel 算子[16],传统Sobel 算子只有水平和竖直方向上的两个算子模板,分别为:
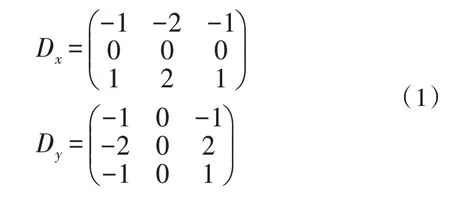
将其分别与图像像素点灰度值作卷积,可得到图像像素点水平方向梯度和垂直方向梯度,该点处的像素灰度梯度可表示为:

图像清晰度评价值可表示为:

其中,G()x,y>T时有效,T为预设阈值,通过阈值的设定,可以对噪声产生一定的抑制作用。
1.2 图像清晰度评价曲线的检焦能力评判指标
良好的清晰度评价曲线应该近似于图1 的表现形式,具有如下特性[12]:
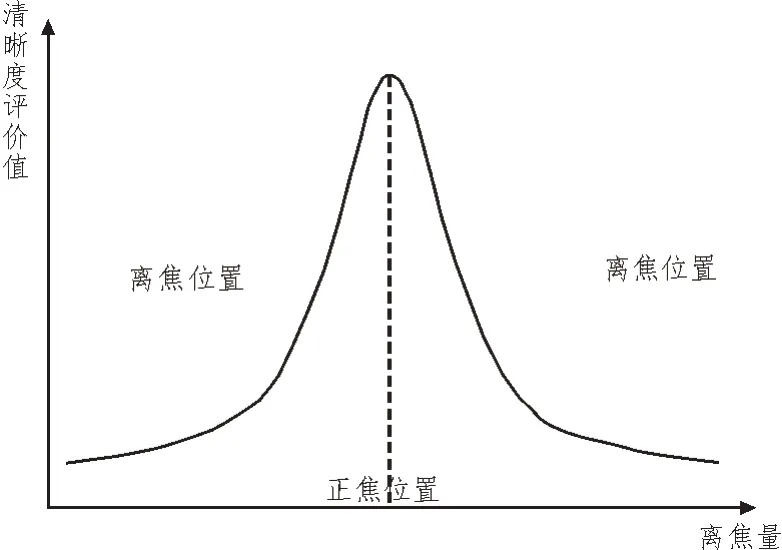
图1 理想清晰度评价曲线
1)单峰性:理想的对焦位置(曲线全局极值点)有且只有一个,且在峰值两侧保持单调性。
2)无偏性:在整个调焦过程中,由光学成像系统采集到一系列图像得出的清晰度评价曲线的走势必须符合成像面的实际状态变化趋势。
3)抗噪性好:当系统受到噪声干扰时,清晰度评价曲线应当尽可能减小局部波动。
4)高灵敏度:当成像面相对于正焦位置仅发生轻微改变时,从清晰度评价曲线上依旧能明显分辨出状态变化。
2 文中方法
为了进一步提高图像清晰度评价曲线的灵敏度和稳定性,文中针对1.1 节中的Sobel 算子从以下3 个方面提出改进:①考虑到像素间灰度梯度变化方向并不固定于某一特定方向,故此丰富梯度卷积算子模板,在原本仅有水平、竖直两个方向的基础上添加了斜向的6 个算子模板,使得灰度梯度评价信息更加全面;②根据人眼视觉特性,调整不同视觉方向上算子卷积的权重;③改变原本取固定参数阈值的方式,引入Donoho 阈值,以灵活适应不同特征的图像。
首先将Sobel 算子仅有的两个方向卷积算子模板进行扩展,保证像素灰度梯度评价信息更加全面,增加了6 个方向算子后,该卷积模板变为:
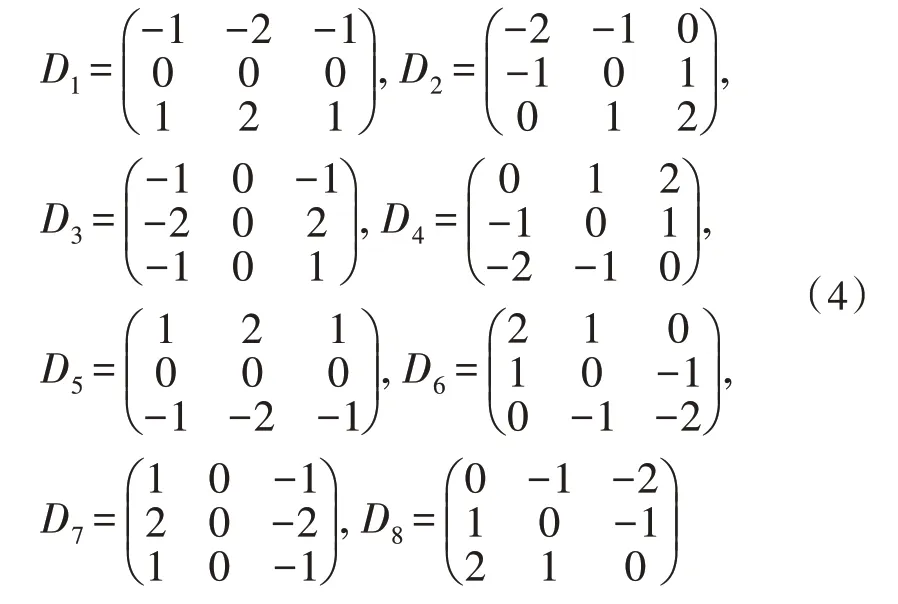
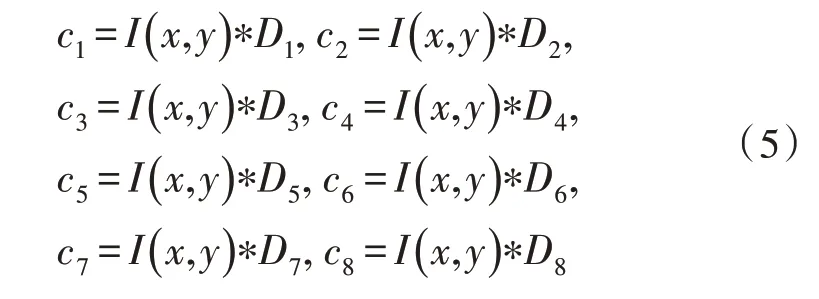
再将其分别与像素点灰度值进行卷积:
人类视觉系统(Human Visual System,HVS)相关研究提出,人类视觉皮层上简单细胞和复杂细胞的感受野对于一定方位上的刺激反应最强烈。人眼对于水平和竖直方向的刺激反应更敏感,而对于对角方向的刺激反馈较弱[17]。基于此特性将垂直和水平方向上的4 个卷积算子模板的权重设置为其他4 个方向上卷积算子模板的两倍,得到:

由于基于Sobel 算子的Tenengrad 函数本身采用的是带参数的阈值,实际上每幅图像各自的特征信息差异巨大,使用含参阈值需要人为调整,缺乏灵活性并且可能引入最佳阈值选取误差。文中改动了预设阈值,采用Donoho 经典阈值,该方法由于1994 年提出,是一种基于小波变换的收缩阈值降噪方法[18]。该阈值为:
3 实验验证与分析
3.1 清晰度评价性能仿真实验
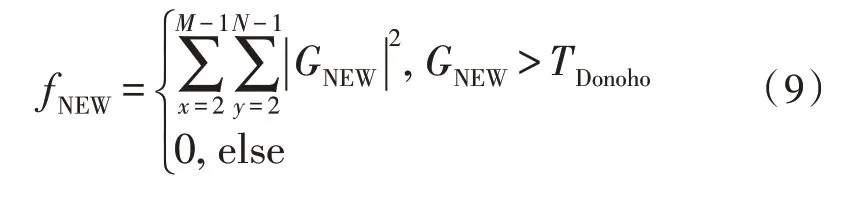
为了验证文中检焦清晰度评价函数的有效性,采用圆盘模型来模拟离焦点扩散函数,依次用r=0.6~2.9(间隔0.1)和r=3.0~11.0(间隔2.0)的模糊半径对cameraman 图像进行离焦模糊。模拟从正焦到离焦的过程,得到编号从1 到30 的图片序列,其中编号为1 的图像是正焦面原图。随着编号的增加,图像离焦程度逐渐增大。部分图像序列如图2 所示。
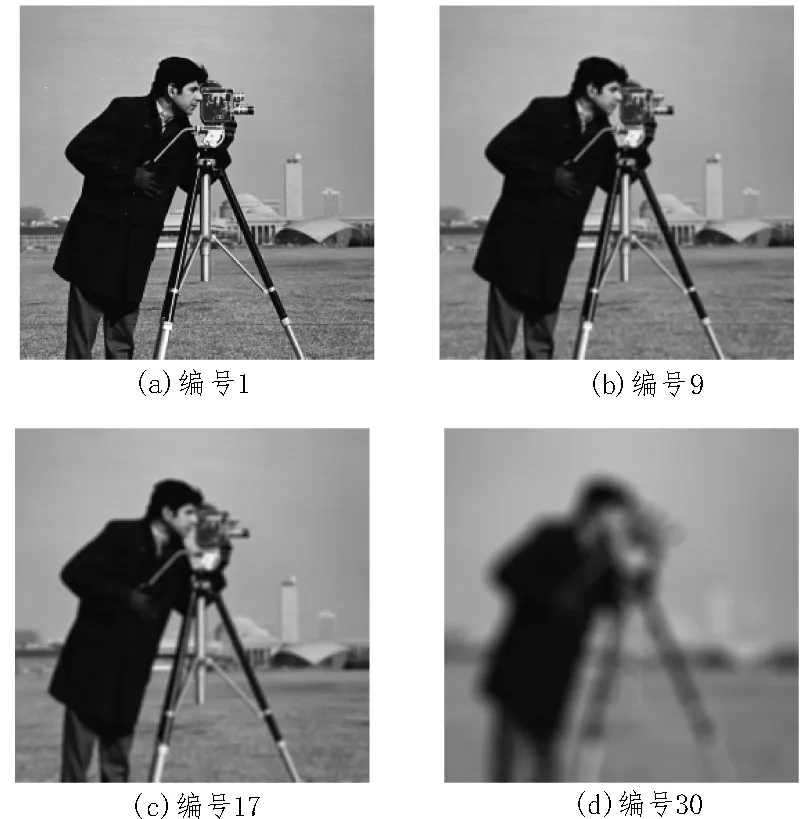
图2 离焦图像部分序列
分别用1.1 节中的各种传统方法和文中方法对离焦图像序列进行清晰度评价,并对评价结果作归一化处理,最后得出的清晰度评价曲线如图3 所示。
图3 cameraman的清晰度评价曲线
在图3 的检焦清晰度评价曲线图中,横坐标为离焦图像序列,纵坐标为每幅离焦图像的归一化清晰度评价值。
实验结果显示,在无噪声的理想情况下,所有的清晰度评价曲线都能满足单峰性,没有出现局部最大值波动点,并保持了严格的无偏性;同时文中提出的方法灵敏度得到了提升,在曲线峰值附近(轻度离焦区)斜率最大,更有利于区分微小离焦量,接下来进行抗噪性能讨论。
3.2 清晰度评价函数抗噪性分析
经过图像校正和补偿后,光学系统输出图像的主要噪声有图像采集时产生的椒盐噪声和阻性元器件内部产生的高斯噪声[19-22]。利用仿真软件分别对原图像加入密度为0.05 的椒盐噪声和方差为0.1 的高斯噪声,并分别对添加了椒盐噪声和高斯噪声的cameraman 离焦图像序列进行评价,将所得清晰度评价值进行归一化处理,含噪声离焦图像及对应清晰度评价曲线如图4 所示。

图4 含噪声离焦图像及其对应清晰度评价曲线
结果表明,文中提出的方法在椒盐噪声的影响下依旧保持良好的灵敏性,在添加高斯噪声的情况下灵敏度有所降低;但在两种噪声的影响下依旧满足良好的单峰性和无偏性,在DFT 评价函数和Laplace 函数表现出约1~5 个不等的异常波动点情况下,文中方法依旧未出现局部最大值波动点,具有良好的抗噪稳定性能。
3.3 灵敏度定量分析
对3 组无噪声离焦图像进行定量的灵敏度评估,分别为cameraman 图像组(人像)、eight 图像组(图像具有大面积背景特征)、testpat1(图像为纹理特征图样)图像组。灵敏度因子公式为[12]:

其中,Fsen为灵敏度因子,Zmax为正焦处的横坐标,ε是横坐标的改变量,Fmax和F(Zmax+ε) 分别对应Zmax处和Zmax+ε处的清晰度评价值。
结果表明,相较于传统方法,文中提出的基于改进Sobel算子的清晰度评价函数的平均灵敏度因子提升了约0.086~0.215;并且文中提出的方法在提高灵敏度的同时,在中度离焦区曲线变化明显,保持着良好的检焦评价能力,并且具有优越的稳定性,无局部最大值波动点。
3.4 真实图像验证
为了验证文中方法针对离焦系统所拍摄图像的实际表现,分别采集了一系列单一场景和复杂场景的真实离焦图像,如图5(a)、(b)所示,真实评价结果如图5(c)、(d)所示。
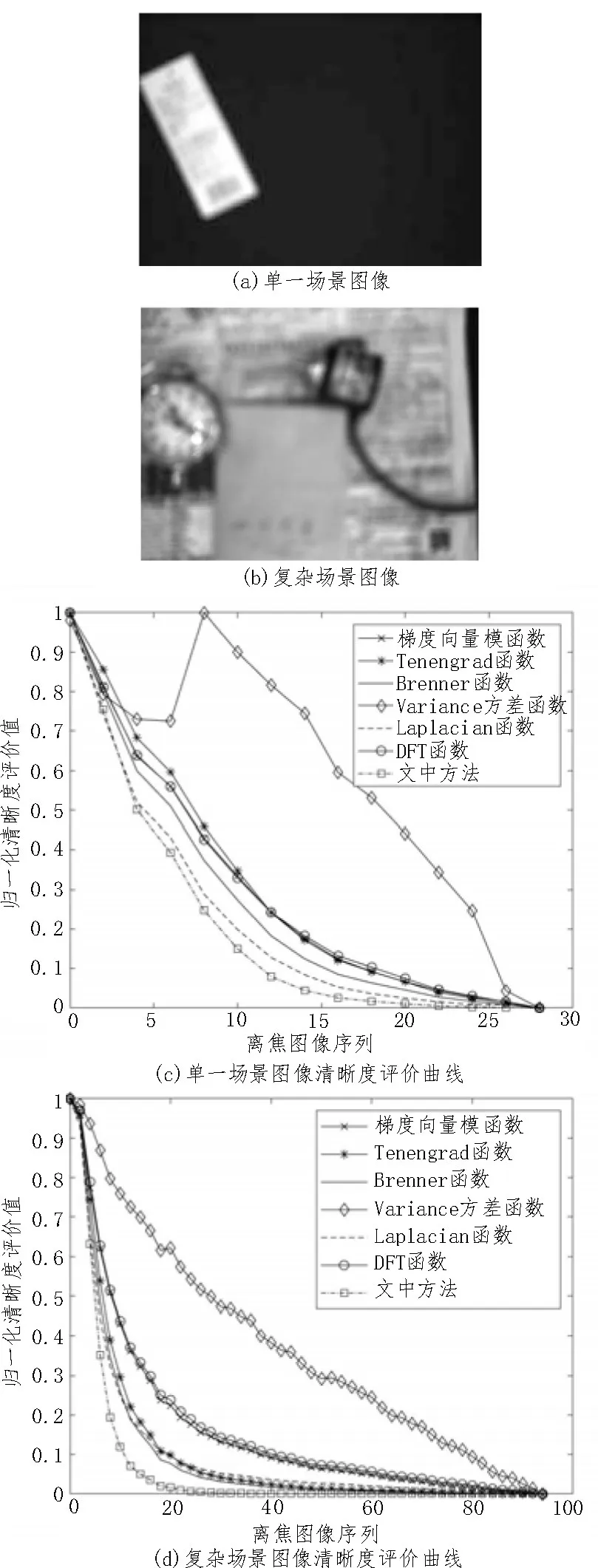
图5 真实离焦图像及其清晰度评价曲线
结果表明,文中方法在实际场景中的表现严格满足单峰性和无偏性要求,表现出最佳的灵敏度,未出现任何局部最大值波动点,在检焦系统的精检阶段应用中可靠有效。

表1 各检焦评价函数的灵敏度因子
4 结束语
文中在图像检焦清晰度评价方法的基础上,通过对清晰度评价函数的Sobel 算子进行改进,提出了一种新的清晰度评价方法。实验结果表明,相较于传统的清晰度评价函数,该方法的灵敏度和抗噪性得到了稳定提升,可为光学成像系统的检焦调焦过程提供方便有效的参考依据,但是由于改进的方法计算量相对更大,未来在实时性方面还有待进一步优化。
猜你喜欢
医院管理论坛(2022年8期)2022-10-14
数学物理学报(2022年5期)2022-10-09
现代电力(2022年2期)2022-05-23
Journal of Geriatric Cardiology(2021年1期)2021-03-03
家庭影院技术(2020年11期)2020-12-28
家庭影院技术(2020年4期)2020-05-21
校园英语·上旬(2020年1期)2020-05-09
电声技术(2020年10期)2020-03-24
北京航空航天大学学报(2017年5期)2017-11-23
卷宗(2017年16期)2017-08-30
