煤矿沉陷水域水体深度多源数据融合反演
2022-04-20 11:20:06王明达徐良骥叶伟刘潇鹏
遥感信息 2022年1期
王明达,徐良骥,2,叶伟,刘潇鹏
(1.安徽理工大学 空间信息与测绘工程学院,安徽 淮南 232001;2.安徽理工大学 深部煤矿采动响应与灾害防控国家重点实验室,安徽 淮南 232001)
0 引言
由于煤矿的长期开采,导致我国东部高潜水位矿区逐年形成大量的沉陷“水域”,因为沉陷水域形状不规则、分布较为独立,并且随着开采的进行,沉陷水域的范围和深度也不断发生变化,这些因素都给沉陷水域水资源的调查及其管理增加了一定的难度。如何准确、高效、低成本地获取煤矿沉陷水域水体深度成为当前相关领域学者关注的重点之一[1-2]。沉陷区的地表下沉伴随着矿井工作面开采持续进行,范围也持续扩大,要求沉陷区水深测量具有周期性[3]。传统沉陷水域水深测量是操作无人船完成的,因沉陷水域分布分散,大大提高了无人船水深测量的成本。遥感水深反演技术相比传统的水深测量技术有着明显的优点,如周期短、探测范围广、不受地理与人为条件限制、成本低。
遥感水深反演技术是使用遥感影像反射率来估计水深的测量方法。自20世纪50年代起,国内外的研究学者对水体水深反演一直保持着高度的研究热度,反演方法可总结为三种:经典模型、半理论半经验模型和统计相关模型[4]。Lyzenga[5]根据电磁波在水体和大气中传播时辐射能量变化规律,建立并简化了电磁波辐射传输模型,在浅海区域验证了模型的可靠性。戚甲伟等[6]基于南海北岛附近海域的WorldView-2高分辨率影像数据和实测数据,构建对数变换模型与双波段线性回归模型,对海底水深进行反演精度评估,并且研究了不同海底底质对水深反演精度的影响。张磊[7]利用Landsat-8影像数据与无人船实测数据,构建12个反演因子的多波段模型,在检验组的反演中得到的总体平均绝对误差在0.72 m左右。温开祥等[8]利用Sentinel-2多光谱影像在经典模型的基础上对梅州水库进行水深反演研究,运用三种深度学习算法对模型进行训练,与经典模型反演精度进行对比,结果表明深度学习算法提高了水深反演的精度。遥感水体水深反演研究方向主要集中于浅海地区[9],但在矿区沉陷水域水体的水深反演研究成果不多。吴双等[10]利用Landsat-5TM结合煤矿开采沉陷预计软件对淮南矿区沉陷水域水体水深进行反演研究,构建多元非线性正值模型,拟合优度达到了0.97。本文以Sentinel-2影像数据结合SVM算法对经典模型进行精度优化,探讨矿区沉陷区水体水深反演精度,以及不同水深区间的模型反演精度,为矿区沉陷水域水资源开发利用提供水深获取方法的参考。
1 研究区概况
谢桥煤矿地处淮南矿区,位于安徽省颍上县谢桥镇,区域煤层厚且发育稳定,受煤层开采、高潜水位影响,矿区地表形成大量的沉陷水域。选取其中一个面积较大的沉陷水域作为研究区。研究区位于谢桥矿西翼采区,东西长约3 000 m,南北长约1 500 m,沉陷水域面积约4.5 km2,深度约0~12 m[11]。研究区域常年降雨量在1 040 mm以上[12],地下水充足,沉陷水域前身多为农田、道路、村庄等。目前沉陷水域多用于开阔型湖面养鱼,水草、渔网等较少,无潮汐现象。
2 反演方法与模型建立
2.1 多光谱反演水深的基本原理
多光谱反演沉陷区水域水深的目的是建立遥感影像像元辐射通量与水深之间的表达式。而可见光在水体中传播时,一部分能量被水面吸收、反射、散射掉,另一部分能量被水底反射回大气被传感器接收。这种光具备水下地形信息,是遥感反演水深的主要数据源,可见光会因水体的吸收和反射而衰减。入射辐射通量表示如式(1)所示。
TZ=e-αz
(1)
式中:TZ是水深为z时的入射辐射通量;α为可见光衰减系数。考虑到可见光在水体中的反射影响,水体辐射量表达如式(2)所示。
LE=e-2kzLb+(1-e-2kz)LW
(2)
式中:LE为水体辐射量;Lb为底部反射的离水辐射量;LW为深水区辐射量;k为水体反射系数。将水体的辐射量归一化为反射率,表达如式(3)所示。
RE=e-2kzRb+(1-e-2kz)RW
(3)
式中:RE为水体反射率;Rb为底部反射的离水反射率;RW为深水区反射率。水深表达如式(4)、式(5)所示。
RE=K1e-k2z
(4)
z=a0+a1ln(RE)
(5)
式中:z为水深;RE为水体的反射率;a0和a1为未知参数,这些参数根据实测水深与反射率之间的关系求解。
当沉陷区水域清澈且水质分布均匀时,可以使用式(4)、式(5)直接估算水深。但沉陷区水域的水底空间分布不均匀、水体中悬浮物较多,因此,本文使用多光谱反射率结合式(4)、式(5)来反演水深。
2.2 水深反演模型
1)单波段模型。基于水深反演的基本原理,单波段模型的水深反演如式(4)、式(5)所示。
2)多波段模型。多波段模型集成了不同波段对水体的反射率的影响,根据Polcyn等[13]的研究,多波段模型适用于水体底质均匀、波段反射比一致、水深较浅水体的水深反演,表达如式(6)所示。
z=a0+a1ln(R1)+…+anln(Rn)
(6)
式中:z为水深;a0、a1、an为未知参数;R1为波段1的反射率;Rn为波段n的反射率。
3)双波段对数比值模型。双波段对数比值模型是由Stumpf[14]提出,水体深度对较高衰减特性波段的影响远远大于较低衰减特性的波段。因此,双波段对数比值模型对水体深度变化有很强的敏感性。
(7)
式中:Ri和Rj分别为i和j波段的反射率。
2.3 基于SVM改进的反演模型
SVM作为常用机器学习中的一类,主要用于数据分类与回归等问题[15]。本文利用SVM回归对数据具有的稀疏性,若样本点与回归模型足够接近,即落入回归模型的间隔边界中,利用核函数将样本空间变为线性可分空间,利用间隔边界对样本进行预测分析。沉陷区水域底质变化大、水深高低起伏大,选择拟合优度最好的三种模型使用SVM对模型进行回归分析。利用沉陷区参考水深值作为因变量,反射率为自变量进行预测分析。本文的水深反演技术路线如图1所示。
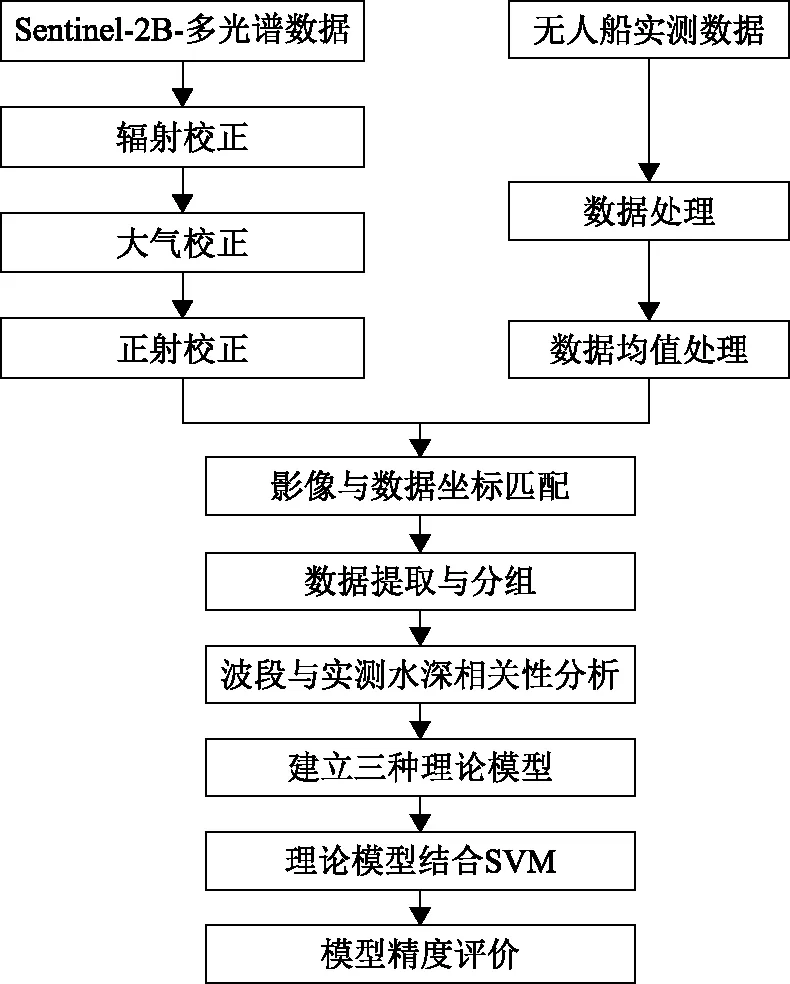
图1 水深反演流程图
3 数据获取与处理
3.1 水深数据获取
1)无人船测量原理。水深参考值取自于2018年8月智能无人船的实测数据。无人船测量系统的核心任务是进行水深测量和导航定位,实现这些任务所需要的仪器设备包括数字测深仪、姿态传感器、GPS接收机、全角度摄像头和距离传感器等。智能无人船系统的导航定位主要采用GPS-RTK动态差分定位原理,在岸边基准点架设GPS基准站接收GPS卫星差分信号,并将差分数据发送给智能无人船安置的GPS接收机,实现实时定位和导航功能。水深测量由安置在船上的数字双频测深仪完成。
2)无人船测量方法。无人船测量水深首先需要将坐标系统进行4参数求算,在岸边找到合适的点位架设基站。根据沉陷积水区湖面实际情况规划无人船行驶路线,设置航行速度为6~7 km/h,保证无人船航行的稳定性。实时查看无人船船控电脑的数据,保证信号固定和航行姿态正常。利用HiMAX测深软件对水深数据进行处理。
3.2 影像数据
Sentinel-2分为2A和2B两颗卫星,是高分辨率多光谱成像卫星,用于陆地监测,可提供植被、土壤、水资源、内陆水路及海岸区域等图像,还可用于紧急救援服务。Sentinel-2B卫星于2017年3月7日发射,与2015年6月23日发射的Sentinel-2A为一组卫星,卫星携带高分辨率多光谱成像装置,高度为786 km,共覆盖13个波段,一景影像宽达290 km[16]。研究区域的遥感影像数据选用与水深测量相近时期2018年10月12日的Sentinel-2 Level-1c遥感影像数据,该景影像的水体边界清晰,研究区域上空无云,云量0.07%。为获得真实的地物反射率,运用欧空局针对Sentinel-2数据的预处理专门开发的Sen2Corc插件,对影像进行辐射定标、大气校正、正射校正,使用归一化水体指数(normalized difference water index,NDWI),设置阈值,对沉陷区水域进行提取。
3.3 数据匹配处理
本文使用的参考水深数据为沉陷水域实测水深数据,无需进行潮汐改正。为实现水深数据与Sentinel-2影像像元的辐射亮度值一一对应,将无人船测得的共1 846个水深点,使用ArcGIS将水深数据与影像数据统一到UTM、WGS-84投影坐标系中,根据设置好的基准点进行地理配准。因无人船连续自动采集数据的间隔距离设置为5 m,使用影像数据的空间分辨率为10 m,所以在一幅影像像元分布着一个或多个水深采集点。为了提高反演精度,去除一个像元中小于等于一个实测值的点。选取一个像元中的实测值均值作为像元区域的水深值。为了更好地对实测数据与遥感数据进行匹配和统计分析,最终处理后的水深数据分为530个作为训练组、65个作为检验组。检验组用于检验模型误差不参与建模。
3.4 反演因子的选择
理论上可见光穿透清澈的水体时,在可见光的波段范围中,不同波长在水体中的衰减程度不同,波长越长衰减越快。有研究表明,蓝波段的穿透深度最大,约为30 m,绿色波段约为15 m,红波段约为5 m,近红外波段的约为0.5 m。沉陷区水体成分复杂、浑浊度高,影响可见光在水体中的穿透性。根据无人船测得数据表明,沉陷区水体最大水深为10.02 m,沉陷水域水深反演模型的建立符合理论。波段选用Sentinel-2中空间分辨率为10 m的B2、B3、B4、B8波段与无人船水深实测值进行相关性分析,结果见表1,四个波段均通过了显著性检验。

表1 各波段与组合波段的相关性分析结果
从表1可以看出,可见光中B3和B4波段与无人船实测值相关性较高。利用Sentinel-2中的四个波段对应的水体反射率作为自变量,相应坐标的无人船水深实测水深为因变量,构建的反演模型如表2所示。
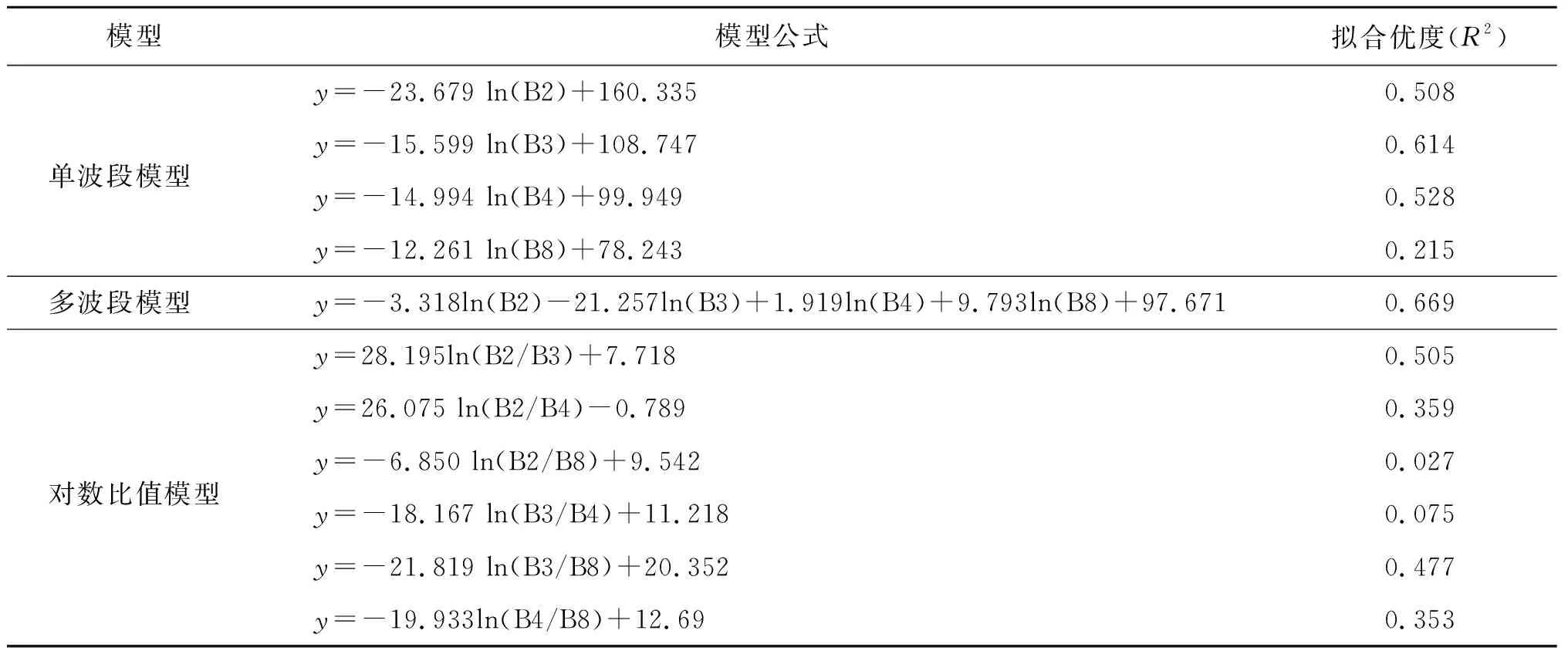
表2 经典模型线性模型
从表2可以看出,单波段模型中利用绿色波段的反演模型拟合优度最高,为0.614,红色波段次之,拟合优度为0.528。多波段模型的拟合优度是全部反演模型中最高的,为0.669。双波段对数比值模型中拟合优度最高的为蓝色波段比绿色波段,拟合优度为0.505,绿色波段比全色波段的拟合优度次之,为0.477。其他对数比值模型拟合优度不高,说明沉陷区水体在蓝色与绿色波段有更强的特殊性,水产养殖、水草茂密和水下地形复杂可能为拟合优度不佳的主要原因。
4 结果与讨论
在沉陷水域的Sentinel-2卫星影像中,利用65个检验组数据分别对选取出来的单波段模型、多波段模型、对数比值模型进行精度评价。绘制如图2所示的模型反演值与实测值一一对应的关系图。可以看出,经典模型0~3 m与6~9 m的离散程度较高,3~6 m区间拟合效果较好。
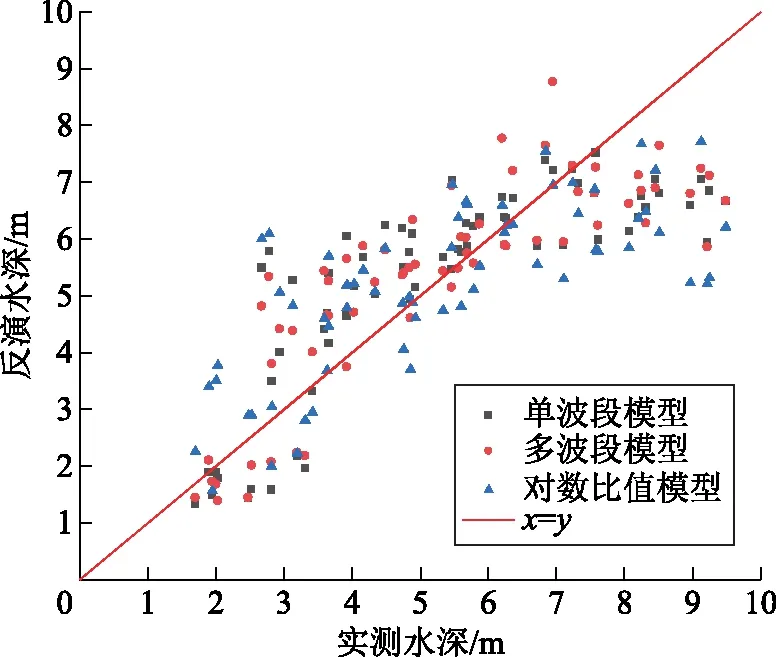
图2 经典模型
为了进一步优化水深反演结果,利用SVM算法对经典模型中各自对应的最高拟合优度的模型进行优化。在模型构建过程中,将波段辐射亮度值进行对数处理,保持与经典模型相同的自变量。采用SVM算法训练好的单波段模型、多波段模型、对数比值模型分别对检验组进行预测,绘制如图3所示的SVM反演模型反演值与实测值一一对应的关系图。从图3可以看出,SVM模型反演相对于经典模型三种模型的拟合效果都有所提升。反演水深值与实测水深值的离散程度降低,特别是SVM多波段模型在3~6 m区间拟合效果有所提升。
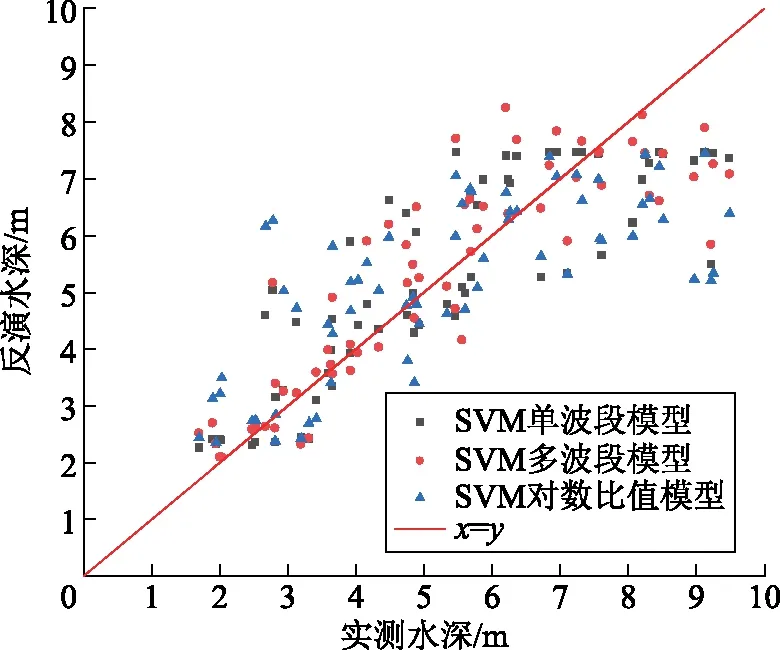
图3 SVM模型
利用检验组实测数据对六种模型进行误差分析,如表3所示,在六种模型中,最优的模型出现在SVM多波段模型中,均方根误差为1.07 m,平均绝对误差为0.77 m,拟合优度为0.759。SVM单波段模型次之,两种对数比值模型的精度最差,精度最高的SVM多波段模型相对于精度最差的对数比值模型均方根误差提升了0.46 m,平均绝对误差和拟合优度提升的幅度较大,分别为0.4 m、0.242,但是对数比值模型与经典模型的误差相差不大。
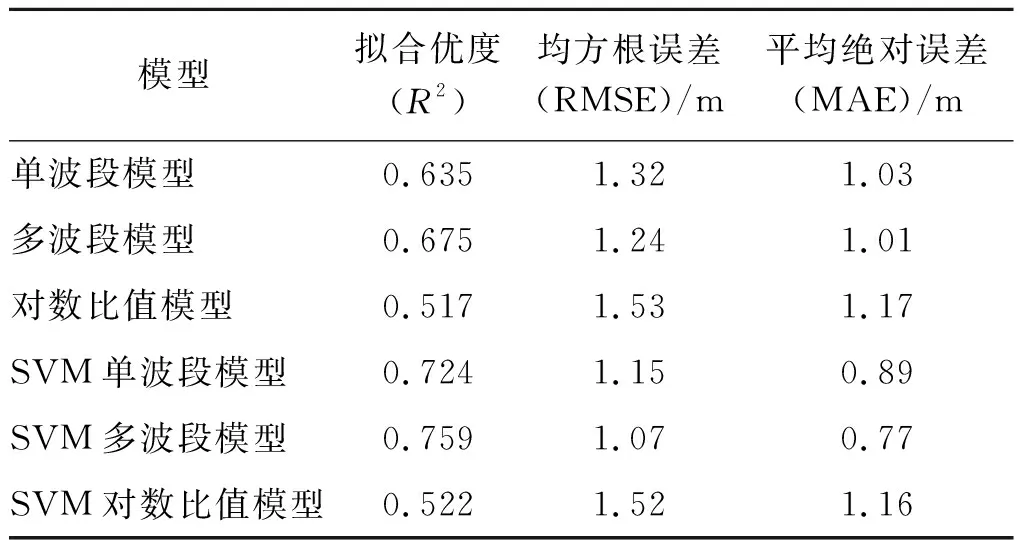
表3 模型的误差分析
将沉陷区水域水深分为0~3 m、3~6 m、6~9 m、9~12 m四个深度区间,如图4所示,将相应区间的经典模型与SVM模型检验组反演的RMSE对比分析。可以看出,在四个水深区间,SVM多波段模型的RMSE最低,为0.798 m,SVM单波段模型的RMSE次之,为0.928 m。在0~3 m深度区间,相对于3~6 m、6~9 m区间的RMSE较高,原因是0~3 m区间属于沉陷水域近水岸地区,水底底质多为水草和人工养殖区,水质较差,反演效果不佳。

图4 不同波段模型与不同范围水深的RMSE对比
然而9~12 m区间模型精度最差,原因可能是沉陷区水体中含有建筑物构筑物,在无人船测量水深时,测出的水深不足以代表整个10 m×10 m的平均水深。SVM模型在各个深度区段精度提高不等,0~3 m区间的单波段模型与多波段模型精度提高较为明显。3~6 m、6~9 m区间精度提升不大,原因是该水深段经典模型的反演精度较为理想,因此SVM对模型的精度影响较小。
结果表明,经典模型结合SVM算法反演模型在沉陷区的水深反演中有更高的精度,可以作为测量沉陷区水深的一种新型方法,能够为矿区沉陷区的水深变化以及生态环境评价提供参考。
5 结束语
本文根据Sentinel-2遥感影像数据和无人船实测水深数据,利用单波段模型、多波段模型、对数比值模型构建出各个波段的经典模型,对矿区沉陷水域水深进行反演,筛选得到三种经典模型中对应拟合优度最大的模型,得到结论如下。
综合Sentinel-2的四个波段建立三种经典模型,多波段模型的拟合优度最大(0.669),对数比值模型的拟合优度最小(0.505)。SVM算法结合经典模型在检验组的均方根误差RMSE中,多波段模型的精度最大(1.07 m)优于经典模型,在0~12 m深度范围内,反演精度最高的为SVM多波段模型,RMES分别为0.798、0.909、1.021、2.380 m。本文的所有模型中,SVM多波段模型反演沉陷水体的水深值与实测值偏差较小,反演精度达到一定要求,可以为矿区沉陷区水资源利用提供方法参考。
本研究仍存在不足之处,在沉陷区水体水深方面,由于水体底质过去是房屋、农田、道路,相邻水深实测值的变化较大,在与遥感影像辐射亮度值进行一一对应时,受限于遥感影像的空间分辨率,在一定程度上影响反演的精度。在后续的工作中,在保证数据精度的条件下,使用更高空间分辨率的多光谱影像数据与实测无人船数据进行反演研究。对算法模型进行优化,减少异常值对模型的干扰,提高多光谱遥感反演精度将是未来工作的方向。
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
湖南林业科技(2021年3期)2021-12-02 21:15:32
——拟合优度检验与SAS实现
四川精神卫生(2021年5期)2021-11-04 08:31:36
水上消防(2020年5期)2020-12-14 07:16:14
文史春秋(2019年11期)2020-01-15 00:44:36
智能城市(2018年7期)2018-07-10 08:30:00
当代化工研究(2016年6期)2016-03-20 16:21:40
浙江国土资源(2015年4期)2015-05-09 08:43:59
科技与管理(2014年4期)2014-12-31 11:25:39