面向装配检测的室内GPS测量站位规划方法研究
2022-04-19 01:18王飞范景韬曾琪马苗苗张明华
机械制造与自动化 2022年2期
王飞,范景韬,曾琪,马苗苗,张明华
(1. 中航工业北京长城航空测控技术研究所,北京 101111;2. 南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
飞机、船舶等大型产品的装配具有作业空间大、部件结构复杂、精度要求高等特点,为了适应高效、高精度的生产作业要求,诸如激光跟踪仪、激光雷达、室内GPS(iGPS)等大尺寸测量系统已得到广泛关注与应用[1-2]。与其他大尺寸数字化测量设备相比,iGPS具有测量稳定性强、测量实时性好、支持并行测量等优势[3],以其为基础设备的协同测量技术已成为当前大尺寸空间测量技术的发展趋势。
CHEN Z H、栗辉等将手持扫描系统、激光雷达与iGPS相结合,完成大部件的外形与位姿检测[4-5]。ZENG Q等[6]采用其实现大部件的转站导航,并与激光测距系统、视觉测量系统共同完成对接装配工作。无论与任何其他设备进行融合测量,iGPS测量系统应用的关键在于发射器布局,不同空间布局所确定的测量系统定位精度存在差异。目前,国内外学者对iGPS发射器布局进行了相关研究。德国卡尔斯鲁尔理工学院提出在由4个发射器组成的不同布局中,Box型布局的测量区域误差分布明显优于C型布局[7]。SCHMITT R等[8]对iGPS的几种典型布局进行了仿真模拟与实验分析,标准型布局的误差分布最好。ZHOU N、孙涪龙等构建的测量不确定度通用两站分析模型能够为发射器布局方案优化提供依据[9-10]。天津大学自主研发了wMPS测量系统并对其进行了深入研究。为了使依据测量特征分布自适应地规划发射器站位,郑迎亚等[11]研究测光平面交汇对测量稳定性的影响,利用遗传算法求解最佳布设位置。熊芝、岳翀等综合测量精度、覆盖度与成本分析,则将改进自适应遗传算法和模拟退火与粒子群算法应用于发射器位置搜索[12-13]。
但是,当前研究规划得到的站位大多是在测量环境足够开敞、测量光路无遮挡的条件下,实际测量会不可避免地存在工装、部件等障碍物,容易导致目标点无法解算。针对此问题,需要研究测量站位优化调整技术以保证所规划的发射器站位合理、有效。本文在分析iGPS测量特性、限制条件、实际工况等要素的基础上,制定发射器站位规划基本原则及策略。以AABB包围盒为基础,提出针对目标点检测的快速干涉检查方法,并通过空间网格层次搜索和平面网格螺旋搜索相结合的方式优化干涉站位,实现复杂工况下的发射器站位有效规划。
1 iGPS站位规划原则
iGPS是一种基于三角定位法的数字化测量设备,其利用激光发射器射出的两束红外激光信号到接收器的时间差以及脉冲信号的时间差分别计算俯仰角和水平角,进而计算目标点的测量值。由于实际测量时,工装、部件自身、厂房空间等限制会不可避免地产生遮挡现象,容易导致目标点测量不准确甚至无法测得,而解决这一问题的关键在于发射器站位。
对于空间任一目标点,其至少需被3个发射器观察方可解算,且可达光线数量的增加势必会提高测量精度[5]。在满足目标点可测、可解的情况下,发射器站位布局也会影响整体的测量不确定度分布。为了获得较高精度的测量值,目标点需尽可能在不确定度相对较小的区域。综合考虑覆盖范围、测量精度、光线遮挡等因素,iGPS规划的基本原则为:
1) 保证所有目标点在iGPS的测量范围内,若采用基准点进行标定(即全局坐标系预先定义),基准点需尽可能多地加以覆盖,以全部覆盖为最佳;
2) 每个测量特征均有精度指标,应根据此指标规划合理的发射器布局。一是待测目标点的测量不确定度都满足精度要求;二是保证所有待测点的平均测量不确定度最小;
3) 所有发射器与目标点之间要相隔一定的距离,这是因为距离太近或太远均会影响光学元器件对光学信号的接收,从而影响测量精度;
4) 由于iGPS通过光学信号进行测量,规划时需要保证各发射器与接收器之间无光线遮挡。
依据上述规划原则,面向大型构件装配检测的iGPS测量站位规划基本流程为:
①根据测量特征对iGPS发射器进行初始规划,综合测量需求、空间约束及设备成本,选择合适的发射器布设范围及个数;
②对所有发射器与目标点之间的虚拟光线进行空间干涉检查,若光线与实体没有干涉,则该布局为最终优化后的布局;若存在干涉,运用空间网格搜索在发生干涉的发射器附近搜索新的布设位置。
2 测量空间干涉检查
预规划的发射器站位及其数量需要依据测量特征分布进行确定。文献[12]指出接收器可以接收到的发射器信号数量的增加可以显著提高测量精度,尤以数量从2个增加到4个时最为明显。而当发射器数量继续增加时,测量精度并不会大幅度提高。依据此特性,高精度要求的目标点需尽可能地被4个发射器覆盖。此外,发射器布局一般呈单边或环绕形式,单边布局虽简单但是却无法保证由测量特征确定的最小包络空间内的测量不确定度均匀。圆形或三角环绕布局难以在规则的厂房内开展,而矩形布局简单且易于计算空间的最大测量不确定度。因此,选用4个呈矩形布局的发射器作为一组以构建测量网络(图1)。

图1 呈矩形布局的4个发射器
实际测量时,测量光路极大可能存在工装、部件自身等障碍物,目标点处的接收器无法接收光学信号进行位置解算而形成测量盲区。为此,有必要对每个目标点进行测量光线干涉检查,识别出不可测或不可解算的目标点,而后进行站位调整。测量光线干涉检查的本质是实体求交运算。为了提高计算效率、加快运算速度,基于AABB型包围盒法开展研究。
假设第k个实体Cubk在3个坐标轴方向的最大值和最小值分别为(xkMAX,ykMAX,zkMAX)、(xkMIN,ykMIN,zkMIN),以这两点为对角顶点构建各边平行于坐标轴的立方体Boxk(xkMIN,ykMIN,zkMIN,xkMAX,ykMAX,zkMAX),如图2所示。Boxk即可代替Cubk进行干涉检查。

图2 AABB包围盒坐标范围示意图
已知各顶点坐标,Boxk的外表面Sh可以表示为
Ah(xh-xh0)+Bh(yh-yh0)+Ch(zh-zh0)=0
(1)
其中:(xh0,yh0,zh0)为平面上任意一点,(Ah,Bh,Ch)为平面法矢。
若发射器与目标点的坐标分别为Oi(xOi,yOi,zOi)、Pj(xPj,yPj,zPj),测量光线LOiPj可表示为
(2)
测量光线干涉检查是对实体与光线进行求交运算,而在已知包围盒外表面表达后,其可转化为测量光线与包围盒外表面的求交计算。已知平面方程Sm与光线的直线方程LOiPj,则交点的计算为
(3)
令D=-(Ax0+By0+Cz0),则
(4)
进而依据式(2)求得交点坐标,若其在实体界定的有界平面内,则可判断测量光线与包围盒相交,否则无光线遮挡。
装配检测时,众多的部件待测特征会构建较多的测量光线与实体,较大的计算量不利用快速规划。图3中,包围盒Boxk(xkMIN,ykMIN,zkMIN,xkMAX,ykMAX,zkMAX)与点P(x,y,z)的位置关系分为4种。当P的各坐标分量均在Boxi界定的坐标范围内,则该点在包围盒内;若P有且只有一个坐标分量处于坐标范围之外,以x为例,即x
依据此关系,在进行测量光线与包围盒干涉检查时,通过对P与包围盒的坐标边界进行对比,可以事先确定干涉次数。由于发射器站位必定处于包围盒外,其与每个包围盒的干涉平面最多不超过3个,与传统直线与6个外表面进行求交相比,计算次数减少一半以上。
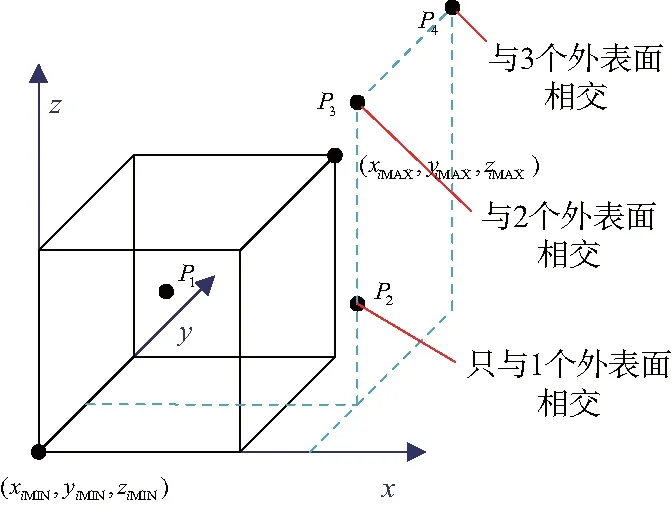
图3 点P与各坐标分量相交示意图
综上分析,构建光线模型遍历各个实体障碍物,记录发生干涉的目标点和发射器站位,若未出现干涉,预规划的发射器布局可作为最终有效布局。具体步骤如下:
1) 获取发射器Oi、目标点Pj,且令i=j=1;
2) 构建Oi和Pj确定的虚拟光线LOiPj,采用快速检查方法遍历空间内所有实体包围盒。若发生干涉,记录对应的(Oi,Pj)组合,并执行3);
3) 判断所有发射器与目标点是否遍历完毕,若遍历完毕,输出发生干涉的组合并结束流程,否则执行4);
4) 判断Oi下的目标点是否遍历完毕,若是,选择下一发射器Oi+1执行遍历检查;否则选取下一目标点Pj+1继续遍历检查,直至遍历完成。
3 测量站位搜索调整
对于存在测量干涉的发射器而言,在不借助外界辅助测量工具(iProbe)或采用其仍无法解决时,只能通过改变发射器空间位置的方式调整光路,进而保证目标点可测。一般情况下,iGPS多用于大尺寸空间下的对接装配测量,类似激光跟踪仪或激光雷达在小范围内的位置调整对整体布局以及测量的影响微乎其微。因此,可以在一定大的空间范围内寻找到与目标点的测量光线均无干涉的发射器位置,此过程分为空间网格层次搜索和平面网格螺旋搜索两部分。
网格搜索的本质是以当前发射器的位置为中心,根据步长划分网格,由近及远搜索目标位置。其限制是在满足无光线干涉的前提下、尽可能寻找距离初始位置较近的空间位置。若发射器Oi(xOi,yOi,zOi)在某一坐标轴方向的单侧搜索范围为D,搜索步长为d,则其搜索空间是由多个中心为Oi、边长为2d、…、2(D-d)、2D的正立方体层层包围,如图4所示,待求目标位置即为各层空间网格的其中一点。

图4 空间网格层次搜索及单平面螺旋搜索路径
空间网格层次搜索是对发射器目标位置进行逐层搜索,从距中心为d的网格空间开始,对当前层的空间网格搜索完毕后再跳至下一层空间网格,直至搜索到符合条件的目标位置或搜索完距中心为D的最外一层。每层空间网格的外表面距离中心位置相等,对于其中的某一平面,利用由近及远的方式从中心向四周进行螺旋搜索。若平面垂直于x轴且与中心的距离为d,先对该平面的网格中心(xOi+d,yOi,zOi)进行搜索,检查是否满足条件。若不满足,在平面网格上向外扩大一圈范围继续搜索,直至满足条件或搜索完毕。
发射器站位的局部调整流程如图5所示,具体为:
1)选取发射器干涉站位Ol,设定网格搜索的搜索范围D与搜索步长d;
2)由中心向外对开始第j层空间网格进行搜索,若对于同一干涉站位,该步骤第一次出现,则j=1;
3)选取第j层空间网格的某一平面进行螺旋搜索,记平面中心网格为平面的第0环,第j层平面拥有j环网格;
4)对网格的空间位置与目标点进行光线干涉检查和站位空间约束检查,若该位置不满足要求,执行下一步;否则记录此位置为Ol的优化位置,且若所有干涉站位尚未优化完毕,选取下一干涉站位Ol+1进行优化搜索,否则循环结束;
5)判断该环所有网格是否搜索完毕,若不是,选择下一网格,跳转执行步骤4),否则执行下一步;
6)判断该环是否为平面网格的最外环,若不是,向外选择下一环网格并执行步骤4),否则执行下一步;
7)判断该层空间网格6个平面是否遍历完毕,若存在未遍历平面,则选取其作为待搜索平面,并执行步骤3),否则令j=j+1,执行下一步;
8)判断j是否为搜索范围的最外层,若不是,跳转步骤2)继续对Ol进行优化搜索,否则当所有干涉站位尚未优化完毕,选取下一干涉站位Ol+1,跳转执行步骤2)开始优化搜索,否则循环结束。

图5 发射器空间位置搜索流程图
4 系统开发与验证
综合上述研究,以OpenCASCADE作为实体运算与可视化平台,开发如图6所示的iGPS测量站位规划系统。该系统集成站位预规划、测量干涉检查、测量站位优化等功能,方便用户观察站位并进行调整。同时,为验证算法及系统的有效性,采用某型飞机翼身对接的水平测量点为实验对象,对其进行发射器站位规划。
在不考虑工装及自身遮挡的前提下,发射器站位布局如图6中的白色部分,所有水平测量点均可测。但通过激光干涉检查发现,右机翼上的LMP_R1、LMP_R2和LMP_R3处的接收器仅能接收来自①和④两个发射器的光束,导致其并不能得以有效解算。由于发射器和翼身部件对称分布,左机翼面临同样的测量难题。对接装配时,机翼位姿基本在小范围内调整,机身保持固定不动,工位整体变动更难以实现,故需要对发射器站位进行调整。黑色部分为调整后的发射器布局,水平测量点均可被3个以上的发射器无遮挡地观察,进而能够完全确定翼身部件的相对位姿。

图6 iGPS测量站位规划系统及结果
5 结语
本文提出了一种面向装配检测的iGPS测量站位规划方法。综合分析制定测量站位规划基本原则和总体策略。利用AABB包围盒法和线面相交模型实现了目标点检测的快速干涉检查,通过空间网格层次搜索和平面网格螺旋搜索优化调整干涉站位,有效输出无测量遮挡的发射器站位。仿真实验表明了该方法以及所开发系统的有效性。本文主要针对在目标点处放置固定接收器进行研究,而尚未考虑辅助测量装置(iProbe)可以解决部分遮挡问题的情况,这还有待后期进一步的研究。
猜你喜欢
今日农业(2021年8期)2021-11-28
水上消防(2021年3期)2021-08-21
兵器知识(2020年11期)2020-11-18
幼儿画刊(2019年6期)2019-11-04
人大建设(2019年5期)2019-10-08
人大建设(2019年3期)2019-07-13
中外文摘(2019年8期)2019-04-30
兵器知识(2019年1期)2019-01-23
汽车维护与修理(2018年3期)2018-12-07
小猕猴智力画刊(2018年7期)2018-08-08