
在基坑监测中自由设站结合三维整体平差的应用
2022-04-19 09:19段伟
科学技术创新 2022年12期
段伟
(中国建筑材料工业地质勘查中心广西总队,广西 桂林 541002)
1 概述
随着时代的发展,城市作业环境愈加复杂,越来越复杂的城市作业环境对建筑基坑监测的要求急剧提升,据我们所知,通常在对建筑基坑监测的过程中采用的监测方法是从两个方向入手,第一个方向是水平方向位移的测量,第二个方向是竖直方向的位移测量,在测量完平面位移测量之后,接下来还要从两个方面入手,第一个方面是平面数据采集,第二个方面是高程数据采集,这两种数据的采集分别用到全站仪和水准仪两个仪器。而且在采集完数据后对数据的计算方法也是从两个方面进行,一方面是平面数据的计算,另一方面是高程数据的计算,这两种数据的计算方式都是采用的传统平差计算方法,采用传统平差计算方法并把两种数据分开来计算造成了监测工作量大并且监测工作比较低效的问题。基坑支护监测也分为水平监测和垂直监测两个方面其中水平位移监测采用的是水准法和精密导线法,垂直位移监测采用的是几何水准法,准线法、精密导线法和几何水准法三种方法在实际施工过程中都有不同程度的缺陷,这些缺陷大部分是累积的大量误差和复杂的现场环境还有偶然事件的影响以及复杂的数据测量及处理过程等。目前,在高速铁路精密定轨变形监测中通常使用CPⅢ测量方法,可将CPⅢ自由设站边角交会的方法应用在基坑监测中[1-2]。采用自由设站边角交会测量法需要考虑基准点数目和网形构成两个因素这两个因素会对自由设站精确度带来一些影响,在本文对基坑进行实际监测时可以加入配合测量所用到的球形棱镜机器人,通过两个方式的结合进行自由设站,由于传统的平差计算方法效率低,所以本文采用的是三维整体平差计算法,通过对自由设站边角交会法监测数据的分析证明自由设站边角交会法可以作为借鉴对象,从而得到广泛使用[3]。
2 自由设站变形监测方法
2.1 自由设站原理其设站点近似坐标计算
自由设站边角后方教会计算法是根据三个方面的测量数据进行计算,并且为了更加精密的评定,这里采用两个或两个以上的设站点的测量数据,测量数据分为三个方面的测量数据[4]。
三维平差数据的计算需要三类观测值,第一类观测值是设站点到基准点的倾斜距离观测值,第二类观测值是设站点到基准点的水平距离观测值,第三类观测值是设站点到基准点的天顶距离观测值,在三维平差数据计算中未知参数就是设站点的这三类观测值,也就是设站点的三维坐标。三维平差数据的计算需要对三类观测值也就是通过给出的三维近似坐标得出误差方程,这里用到的计算方法是间接平差法。通过得出的误差方程,对这三类观测值进行合理定权,对3项观测值进行合理定权计算未知参数的最或然值并进行精度评定[5],计算原理和自由设站近似坐标如图1 所示。
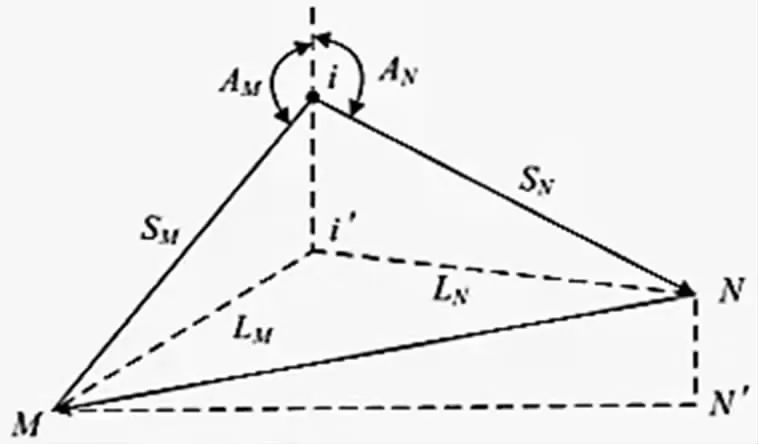
图1 自由设站进似坐标计算示意图
设站点在i 点,对已知控制点M点、N点分别进行观测其中SM、SN 是斜距观测值,AM、AN 是天顶距观测值,LM、LN是水平方向观测值,所以M点到N点方向的方位角计算公式为

2.2 误差方程及方差分量估计定权
对三维坐标列出的误差方程共包含三个,第一个误差方程是设站点到基准点的倾斜距离的误差方程,第二个误差方程是设站点到基准点的天顶距离的误差方程,第三个误差方程是设站点到基准点的水平距离误差方程,对三维坐标列出误差方程采用的是自由设站三维平差法,在得到三个误差方程后,对误差方程进行线性化得到近似值[6]。
斜距误差方程

2.3 方差分量估计定权
在经过对三类测量数据也就是倾斜距离测量数据、天顶距离测量数据、水平距离测量数据进行自由设站三维平差后,接下来要对平差后的测量数据进行定权,通过对经验定权方法的了解,发现经验定权方法有许多缺陷,所以在对本文基坑检测数据定权时选择了方差分量估计法,方差分量估计法有许多优点,其中就包含当多余观测数目较多时定权精度准确,方差分量估计法原理就是先对各个种类观测量进行初定权,通过对三类观测值进行初定全后,在对得到的数值进行预平差,并且按照顺序对他们进行定权。通过以上定全方法得到三个单位权估值,,按照以下式子进行定权
自由设站的点位中误差计算公式
2.4 控制点数数目与布设
在对基坑进行设站时可以得知,设站点的定位精度与很多因素都有关系其中最明显的包含两个,第一个是设站点的控制点点数,第二个是设站点的分布位置。接下来就是对两个因素与设站点点位精度之间的关系进行分析,第一个就是将设站点的控制点个数作为变量时设站点的定位精度会有什么样的变化,第二个就是将设站点的分布位置作为变量来分析设站点点位精度,这里可以采用Matlab 仿真实验进行精度分析。本文通过采用方差分量估计定圈中的三维整体平差方法对平差进行计算实验结果见表1。
通过对表1 进行观察可以得到当增加控制点的数量时点位精度也相应得到提高。

表1 点位精度分析
3 案例工程实践
本文采用的工程实践案例是某地铁配套的综合楼基坑,本文采用的综合楼基坑位于大部分都是山包的地形中,它的主要构成部分是农村用地和企业用地,地面的标高是93.02 米到94.49 米,设计中包含的场平的标高是92 米。在对综合楼基坑的周长进行测量时得到的测量数值是大约为280 米在对松鹤楼基坑的深度进行测量时得到的数值大约为6.32 米,在实际工作过程中采用的监测方案是依据两个方面设计的,即施工方案和规范。下面是该监测方案:a.综合楼基坑的开挖面深度要小于设计方案预计的综合楼基坑深度;b. 在实际工程施工过程中一共分为三个期间在对三个期间的变形速率进行测量时如果这三个期间的变形速率都小于1MM/d 就可以将监测频度改为1 次/7d;c.在施工过程中调整监测频度可以更改为每20 到30d 一次;d.在施工期间,如果检测到有危险事故发生的可能时,应该连续监测。
本文中在对基坑建立监测控制网时采用的是两个传统的测量方法,第一个是闭合导线测量法,第二个是水准测量法。在测量时需要考虑具体的现场情况其中就包含出口位置和视线条件等。本文将监测的基准点布设在比较稳定的水泥地面,而且距离基坑比较远,在本文建立基坑监测控制网时总共布设了六个基准点,用JZ-1~JZ-2 表示监测点的点号。在施工过程中需要获得基准点的三维坐标,可以通过两个方法获得基准点的三维坐标,第一个方法是闭合导线测量法,第二个是水准测量法。在布设监测点的位置时,为了充分的反映基坑的位移情况选择将监测点部设在比较靠近基坑护坡的边缘的位置。并且基坑的深度应该高于30 厘米。这个监测网形一共布设了18 个监测点,每隔20 米布设一个监测点。
使用徕卡TM30 测量机器人进行基坑变形监测时,首先,根据基坑现场情况选择通视较好的地方架设仪器(设站),在设站点上分别观测基准点的斜距、天顶距和水平方向3 类观测值通过平差计算获得设站点的三维坐标;其次,采用极坐标法对监测点进行观测,获得监测点的三维坐标:最后计算2 期数据的差值,分析基坑监测点的三维位移情况[7]。
作业流程步骤:第一步,按照工程设计方案和建筑基坑工程监测技术规范来设计监测方案和确定监测精度;第二步,选择仪器勘察选定埋没基准点和监测点;第三步,导线测量;第四步,水准测量;第五步,确定基准点三维坐标;第六步,使用测量机器人对设站点进行监测并采集数据,这里用到的是自由设站后方交会法;第七步,通过对斜距、水平距离、天顶距离三类测量值进行三维整体平差,得到设站点三维坐标并进行精度评定;第八步,监测点数据图表分析。
设站点为SZ 01 到SZ 04,基准点为JZ-1 到JZ-6,在对设站点进行监测后获得三类观测值。并对其进行平差,并选用了两种方法,三维平差和COSA平面高程平差法。设站点为SZ 01 到SZ 04,基准点为JZ01 到JZ06,在对设站点进行监测后获得三类观测值,第一类是倾斜距离观测值,第二类是水平方向距离观测值,第三类是天顶距离观测值,对设站点SZ01、SZ02、SZ03、SZ04 进行平差计算,这里用到的是方差分量估计定权的三维整体平差方法。并且同时对设站点SZ 02、SZ03 按高程平面分开来平叉的方法进行平差计算,这里用到的是COSA平差软件。
自由设站三维平差计算结果见表2。
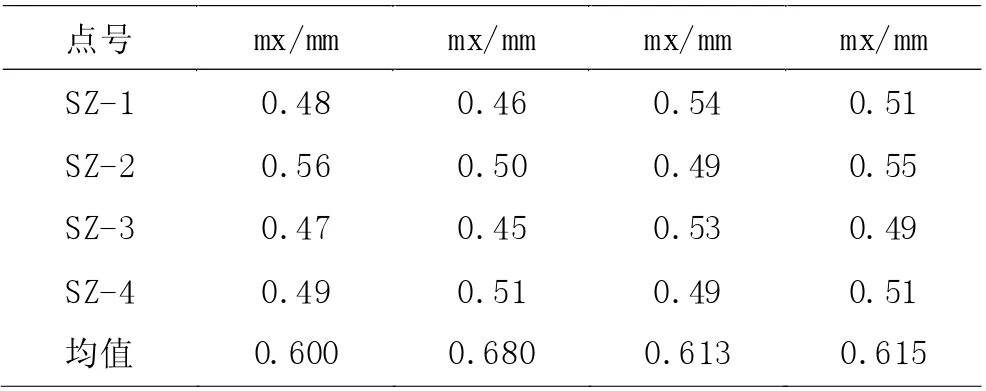
表2 自由设站三维平差计算结果
a.SZ-1 设站点三类测量值分别为0.48 毫米,0.46 毫米,0.54 毫米,自由设站三维整体平差结果是0.51 毫米;b.SZ-2设站点三类测量值分别为0.56 毫米,0.50 毫米,0.49 毫米,自由设站三维整体平差结果为0.55 毫米;c.SZ-3 设站点三类测量值分别为0.47 毫米,0.45 毫米,0.53 毫米,自由设站三维整体平差结果为0.49 毫米;d.SZ-4 设站点三类测量值分别为0.49 毫米,0.51 毫米,0.49 毫米,自由设站三维整体平差结果为0.51 毫米。
四个站点三类测量的平均值分别为0.600 毫米,0.680毫米,0.613 毫米,在对四个站点的三类测量平均值进行整体平差后可以得到误差的平均值为0.615 毫米。
COSA平面高程分别进行平差的结果见表3。
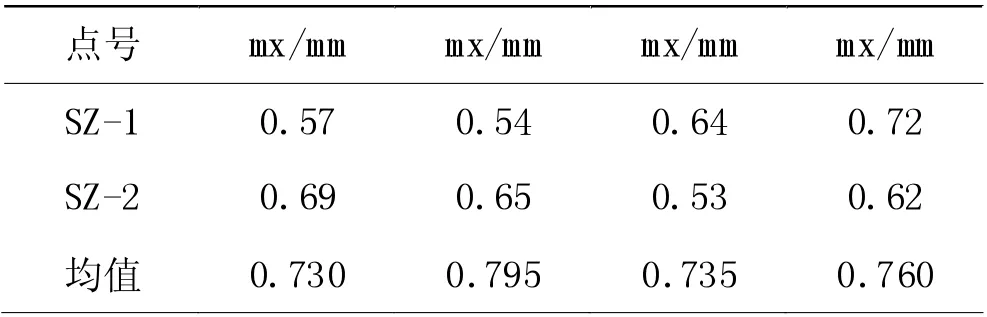
表3 COSA平面高程分别进行平差的结果
a.SZ-2 设站点三类测量值分别为0.57 毫米,0.54 毫米,0.64 毫米,COSA 平面高程分别进行平差的结果为0.72 毫米;b.SZ-3 设站点三类测量值分别为0.69 毫米,0.65 毫米,0.53 毫米,COSA 平面高程分别进行平差的结果为0.62 毫米
两个站点,三类测量值的平均值分别为0.730 毫米,0.795 毫米,0.735 毫米,在对两个站点三类测量平均值进行整体平差后可以得知平均值为0.760 毫米。通过对两种方法测量的平均值进行比较可以得知使用方差分量估计定权的三维整体平差方法的精度更加准确。
在本文中通过对监测点JK-1 到JK-9 连续不断地监测,可以得到监测点竖向位移多变化量。
本文中该地铁配套综合楼基坑完成基坑支护的具体时间是从六月初到6 月15 日,基坑支护开始施工的日期是六月初,基坑支护的具体完工日期是在6 月15 日通过监测点竖向位移变化量的监测可以得到在六月前期基坑变形量非常大随着时间的推一基坑变形量逐渐减小, 在六月中旬达到平稳时期。通过位移变化量可知基坑变形量在预计的范围内,所以通过具体的施工过程的试验可以得知:a.三维整体平差方法进行平差精度更高;b.为了快速精确的设置站点并且得到满意的基坑监测测量效果, 采用自由设站法比较合适。
4 结论
在对本文中的基坑设站点进行监测时可以得知,基坑监测施工现场情况非常复杂,通视效果也不好,在进行设站时可以发现很难设置固定的设站点。在本文工程实践中可以证明,自由设站监测法有很多优点,设站位置的选择灵活并且自动化限度比较大,而且在采集外业数据时速度非常快。通过本文的实践,相信在对相似的基坑设站监测工程进行监测时可以同样采用测量机器人是有设置的边角交会法。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
排灌机械工程学报(2022年6期)2022-06-23
煤气与热力(2022年4期)2022-05-23
建材发展导向(2022年3期)2022-04-19
计算机应用与软件(2022年2期)2022-02-19
建材发展导向(2021年22期)2022-01-18
建材发展导向(2021年12期)2021-07-22
山东工业技术(2017年24期)2017-12-29
西部资源(2017年3期)2017-07-05
敦煌研究(2017年3期)2017-07-05
