电磁复合悬架切换控制与能量双向流动分析
2022-04-19 03:33:18寇发荣洪锋王睿王思俊张宏
机械科学与技术 2022年3期
寇发荣,洪锋,王睿,王思俊,张宏
(西安科技大学 机械工程学院,西安 710054)
悬架系统是汽车重要组成部分之一,被动悬架难以满足各种行驶状态下对悬架性能的较高要求,主动悬架减振性能良好,可使汽车具有良好的操稳性和行驶平顺性,但其能耗较高,不符合目前节能减排的要求[1]。为了解决上述问题,有学者提出一种可以实现振动能量回收的馈能型主动悬架,其可以在满足汽车动态性能的同时减少能源消耗[2-4]。
目前,国内外学者对馈能型主动悬架进行了大量研究[5-6]。Suda等[7]首次提出回收悬架振动能量,并将回收的能量用于悬架的主动控制。上海交通大学喻凡等[8]设计的滚珠丝杠式馈能型主动悬架可在随动模式回收振动能量,在主动控制模式改善悬架动态性能。纽约大学Zuo等[9-10]研制出了齿轮齿条式半主动悬架,该悬架通过齿轮齿条机构将悬架的垂直运动转化成旋转运动,从而带动电机旋转产生电能 ,该悬架还能对电机进行半主动控制,提升汽车平顺性。吉林大学郭孔辉院士[11]提出了一种泵式双筒馈能减振器,在此基础上设计了综合路面的预瞄控制算法,通过试验验证了该减振器既能实现主动控制又能回收振动能量。陈士安等[12-13]提出了一种具有分级变压充电功能的滚珠丝杠式馈能型半主动悬架系统,提高了悬架能量回收效率。汪若尘等[14]设计了计了一种将直线电机与液压阻尼器集成的混合电磁作动器,并对其进行试验,验证了其有效性。上述学者研究的馈能悬架均只有两种工作模式,双模式切换控制无法满足不同行驶工况对汽车悬架的要求,从而不能有效地协调减振特性和馈能特性之间的固有矛盾,并且在悬架工作模式分析时并未考虑主动控制和馈能时能量双向流动的问题。
本文设计了具有3种工作模式的电磁复合悬架结构,根据EMLHA主动悬架的工作原理,结合路面条件和储能系统剩余电量提出电磁复合悬架模式切换控制策略,并设计可实现复合悬架能量双向流动的可变电压源系统,利用MATLAB软件对含有可变电压源系统的复合悬架进行仿真分析,验证复合悬架的能耗特性及动态特性。
1 电磁复合悬架结构与动力学建模
1.1 电磁复合悬架结构及原理
电磁复合式馈能悬架原理如图1所示,该系统是由电磁直线复合作动器、螺旋弹簧、可变电压源电路、控制系统、超级电容、两个加速度传感器组成。其中,电磁复合作动器(由电磁直线电机和电磁阀可调减振器串联构成)结构如图2所示。

图1 复合悬架系统原理简图

图2 电磁直线复合作动器结构
复合悬架处于馈能模式时,在车身振动下,直线电机将振动能量转化为电能,并回收储存至超级电容,实现振动能量回收。处于半主动控制模式时,可通过调节电磁阀节流口大小,进而调节复合作动器阻尼,实现半主动控制,此时直线电机作为发电机进行实时馈能。处于主动控制模式时,直线电机提供电磁推力,从而改善车辆平顺性,实现主动控制。此时电磁阀节流口全开,相当于被动减振器。
1.2 电磁复合悬架动力学模型
电磁复合悬架二自由度动力学模型如图3所示。

图3 二自由度复合悬架动力学模型
根据牛顿运动定律,建立悬架动力学方程组:

式中:m2为簧载质量;m1为非簧载质量;c1为减振器阻尼系数;x1为非簧载质量位移;x2为簧载质量位移;F为直线电机电磁推力;k1为弹簧刚度;x2−x1为悬架动挠度;kt(x1−q)为轮胎动载荷。
1.3 直线电机数学建模
当电磁复合悬架处于馈能模式时,悬架的振动会引起直线电机作动器的初级线圈和次级线圈相对运动切割磁感线,从而产生感应电动势,此时直线电机作为发电机。假设电磁直线电机作为发电机时为理想电机,所产生的感应电动势Um表达式为

式中:ke为电机反电动势系数;−为悬架振动速度。
当电磁复合悬架处于主动模式时,超级电容给直线电机提供能量,使其产生电磁推力,衰减车身振动从而提高汽车的平顺性。
对直线电机进行分析可得在d−q坐标系下,直线电机的电压平衡方程为:

式中:Rs为绕组电阻;Ld为直轴电感;Lq为交轴电感;ψf为永磁磁链;ω为电角速度。
在d−q坐标系下,直线电机电磁推力方程和运动方程分别为:

式中:pn为极对数;τ为极距;v为次级运动速度;M为运动部分质量;f1为负载;B为黏性摩擦因数。
1/4车辆电磁复合悬架仿真模型所用参数,如表1所示。

表1 1/4车辆悬架参数
2 复合悬架模式切换控制策略
复合悬架具有3种工作模式:主动模式、半主动模式和馈能模式。主动模式减振性能好但能耗高、半主动模式减振性能良好且能耗较低、馈能模式回收振动能量。
为了实现悬架能量的双向流动,使得车辆在保证行驶平顺与操纵稳定性的前提下回收更多的振动能量,需要合理地切换复合悬架的工作模式。综合这3种工作模式的特点,设计了基于行驶工况及超级电容剩余电量的模式切换控制策略。
2.1 切换阈值确定
1)加权加速度均方根值
ISO 2631-1:1997(E)标准规定,用加权加速度均方根值aw来评价振动对人体舒适度和健康的影响。表2给出了加权加速度均方根值与人主观感觉之间的关系[15]。

表2 aw与人主观感觉之间的关系
由表2可知:当舒适性较好时,aw<0.5,此时行驶工况较好;当舒适性一般时, 0.5≤aw≤1.0,此时行驶工况一般,当舒适性较差时,aw>1.0,此时行驶工况较差。
2)超级电容SOC
SOC(State of charge)指荷电状态,也叫剩余电量,代表的是电池使用一段时间或长期搁置不用后的剩余容量与其完全充电状态的容量的比值,常用百分数表示,取值范围为 0~100%,当 SOC = 0 时表示电池放电完全,当SOC = 100%时表示电池完全充满。
由于电池在 2 0% ≤SOC≤80%电量为区间时电池工作稳定性最好,因此为了防止电池过充过放,将超级电容的剩余电量分为3个等级:
(1)缺电状态:SOC<20%
(2)正常电状态:20% ≤SOC≤80%
(3)足电状态:SOC>80%
2.2 模式切换控制策略
根据逻辑切换阈值设计的电磁复合式悬架模式切换规则如下:
馈能模式:aw<0.5时,电磁复合悬架处于馈能模式,以数字“0”定义。
半主动模式: 0.5≤aw≤1.0且 S OC≤80%时,或aw>1.0且SOC<20%时,电磁复合悬架处于半主动模式,以数字“1”定义。
主动模式: 0.5≤aw≤1.0且 S OC>80%时,或aw>1.0且SOC≥20%时,电磁复合悬架处于主动模式,以数字“2”定义。
电磁复合悬架模式切换控制策略如图4所示。

图4 电磁复合悬架模式切换策略流程图
2.3 模式切换策略仿真
利用MATLAB软件搭建该复合悬架系统工作模式切换策略的仿真模型进行仿真。仿真条件为:B级随机路面、车速60 km/h、超级电容初始电压8 V。复合悬架工作状态进行切换仿真结果如图5所示。

图5 电磁复合悬架模式切换策略仿真
由图5可知电磁复合悬架能根据行驶工况以及复合悬架超级电容剩余电量的实际情况而实时切换复合悬架工作模式。
半主动模式时,电磁阀功率较小,消耗能量在此忽略不计,此时复合悬架仍能进行能量回收。故复合悬架半主动模式和馈能模式时,电磁直线电机都馈能状态,由式(2)可知,馈能电压与直线电机运动速度成正比,故用电磁直线电机运动速度来表示复合悬架馈能状态,电磁直线电机运动速度如图6所示。
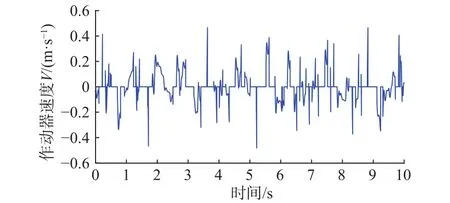
图6 电磁直线电机的速度
主动模式时,电磁直线电机产生电磁推力,用电磁直线电机电磁推力来表示复合悬架主动控制状态,电磁直线电机的电磁推力如图7所示。

图7 电磁直线电机的电磁推力
由图6可知,当电磁直线作动器作为发电机产生能量时,复合悬架处于馈能与半主动模式,与图5中数字0和1对应;由图7可知,当电磁直线作动器输出主动力时,复合悬架处于主动模式,与图5中的数字2对应。复合悬架能够根据行驶工况以及复合悬架超级电容剩余电量的实际情况而实时切换工作模式,从而实现电磁直线电机能量回收和主动力输出两个状态之间实时切换。
3 可变电压源系统设计及仿真分析
设计的复合悬架切换策略可以实现悬架工作模式的实时切换,设计可实现能量双向流动的可变电压源系统,以完成了EMLHA主动悬架的馈能模式、半主动模式和主动模式的电路实现。
3.1 可变电压源系统电路设计
设计的可变电压源系统电路拓扑图如图8所示,其是由AC-DC整流/逆变模块、双向DC-DC变换器及储能模块组成。该电路可在控制器的作用下实现EMLHA主动悬架充放电流的双向流动,从而实现EMLHA主动悬架的馈能模式、半主动模式和主动模式。

图8 可变电压源系统电路拓扑图
如图8所示,AC-DC整流/逆变模块由 6个MOSFET管、一个电阻R和一个电容C1组成,根据超级电容电流信号正负值控制开关导通状态,可实现整流或逆变功能;双向DC-DC变换器由2个MOS管、两个电容C2、C3和一个电感L组成,可实现双向稳压;储能模块由 6个 2.7 V 100 F的超级电容串联而成,作为该系统的电源,可进行充放电,电路中元件参数如表3所示。
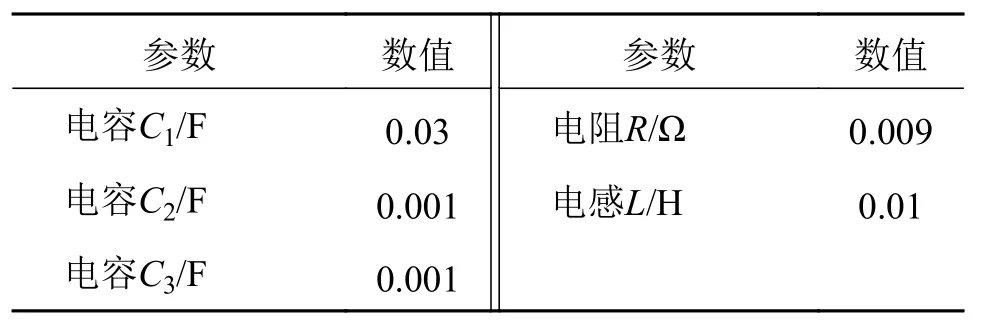
表3 可变电压源系统电路元件参数
AC-DC整流/逆变控制模块可根据超级电容电流信号正负值控制开关导通状态,从而控制MOS管脉冲输入,实现整流或逆变功能,脉冲控制原理如图9a)所示。双向DC-DC变换器控制模块采用电压电流双闭环控制,外环根据参考电压与实际电压构成控制偏差,其差量经过PI调节后作为参考电流信号,内环根据参考电流与实际电流构成控制偏差,差值经PI调节后,将得到的信号通过PWM调制器生成PWM波,作为双向DC-DC变换器中MOS管的控制信号,脉冲控制原理如图9b)所示。

图9 可变电压源系统电路控制原理图
3.2 可变电压源系统仿真分析
设计的可变电压源系统具有两种工作模式:馈能模式与供能模式。馈能模式时,AC-DC整流/逆变模块将三相电压整流为直流电压,双向DC-DC变换器将电压稳定在超级电容的额定电压,超级电容充电;供能工作模式时,超级电容放电,双向DC-DC变换器将超级电容电压稳定在直线电机额定电压,AC-DC整流/逆变模块将直流电压逆变为三相电压。
3.2.1 馈能模式
利用MATLAB软件搭建该悬架的可变电压源系统模型并进行仿真。仿真条件为:正弦复合路面、车速60 km/h、超级电容初始电压为 8 V、仿真时间15 s,其中正弦复合路面选用频率为10 Hz的正弦输入信号,0~5 s的幅值为 0.01 m,5~10 s的幅值为 0.02 m,10~15 s的幅值为 0.03 m。仿真得到的馈能三相电压分别是U1、U2、U3,仿真结果如图10所示。

图10 电磁直线电机馈能三相电压
根据图8和图9a)可知,馈能时,超级电容为充电状态,电流信号大于零,此时开关S1~S6向上导通,整流脉冲信号Z1、Z3、Z5、Z4、Z6、Z2分别与MOS 管Q1、Q2、Q3、Q4、Q5、Q6相连,Z1~Z6脉冲周期均为 0.1 s,Z1~Z6脉冲延迟分别为 0.017 s、0.033 s、0.05 s、0.037 s、0.083 s、0.1 s。AC-DC 整流/逆变模块将复合悬架产生的三相电转变为直流电,整流后电压如图11所示。

图11 整流后电压
由图11可知整流后的电压均大于超级电容组额定电压16.2 V,考虑超级电容充电电压不能高于额定电压,故设参考电压为16.2 V。双向DC-DC变换器对整流后电压进行降压,使电压稳定在16.2 V。电压电流双闭环脉冲控制MOS管Q7的通断,此时Q8处于关断状态。稳压后的电压如图12所示。

图12 稳压后电压
由图12可知,双闭环控制系统能将整流后的电压稳定在参考值电压16.2 V,达到了超级电容的充电电压,故可变电压源系统可以将直线电机产生的三相交流电转化为稳定的直流电,提供超级电容充电所需电压。
3.2.2 供能模式
超级电容端电压随着剩余电量减少而降低,为了保证直线电机作动器的工作性能,需要将直线电机作动器的端电压稳定在32 V,由于电压在经全桥整流后降为电压为原来的0.74[16],因此双向DCDC变换器应将超级电容电压升压至43.2 V,此时Q7处于关断状态,电压电流双闭环控制Q8的通断,将超级电容输出的电压稳定在43.2 V。
为了验证双向DC-DC变换器升压的可行性,选取超级电容电压在 0~5 s时为 16 V,5~10 s时为11 V,10~15 s时为 6 V,仿真结果如图13 所示。
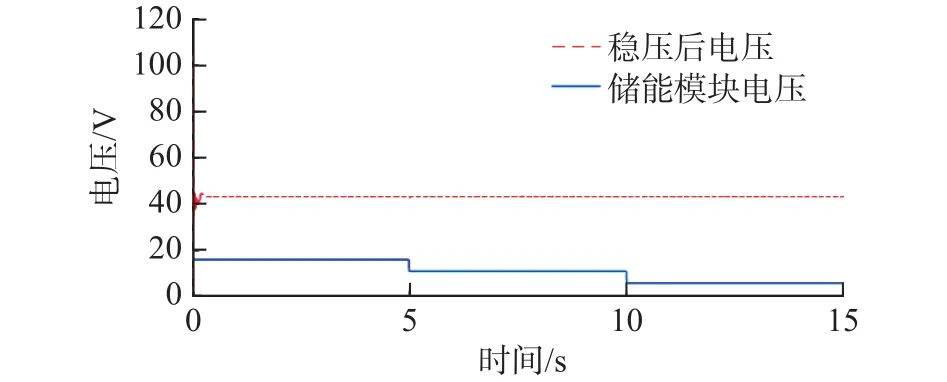
图13 双向DC-DC变换器主动控制稳压电压
由图13可看出,双向DC-DC变换器能将超级电容输出的电压稳定在43.2 V,结合图12可得,双向DC-DC变换器能实现双向稳压。
供能时,超级电容为放电状态,电流信号小于零,开关S1~S6向下导通,此时逆变脉冲信号N5、N3、N1、N2、N6、N4分 别 与 MOS 管Q1、Q2、Q3、Q4、Q5、Q6相连,N1~N6脉冲周期均为 0.1 s,N1~N6脉冲延迟分别为 0、0.017 s、0.033 s、0.05 s、0.037 s、0.083 s。AC-DC 整流/逆变模块将直流电转变为三相交流流电,逆变后电压如图14所示。

图14 AC-DC 整流/逆变模块逆变后电压
由图14可知,AC-DC整流/逆变模块将43.2 V的直流电逆变为29.5 V的三相交流电,与额定电压间的误差为−7.8%,不超过−10%,满足直线电机作动器使用要求。故可变电压源系统可以将超级电容的直流电转换为稳定的三相交流电,提供直线电机工作所需电压。
4 含有可变电压源系统的复合悬架特性仿真
4.1 能耗特性
半主动模式时电磁阀消耗能量较小,在此忽略不计。电磁复合悬架在工作模式切换策略下回收和消耗能量如图15所示,超级电容剩余电量的变化如图16所示。

图15 电磁复合悬架能量变化图
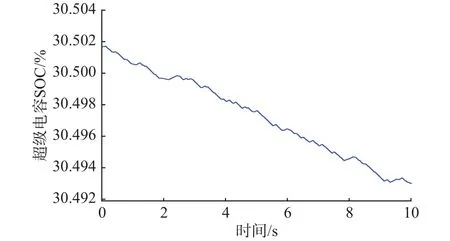
图16 超级电容 SOC 变化量
由图16可知,超级电容SOC变化较小,一直处于正常电状态,此时复合悬架回收能量为90.5 J,所消耗能量为293.9 J,表明在正常电状态时复合悬架处于主动模式的次数较多,超级电容电量减少,此时复合悬架相较于主动悬架能量消耗减少30.7%。
4.2 动态特性
利用MATLAB对B级随机路面、车速60 km/h、仿真时间10 s下的复合悬架动态特性进行仿真分析。复合悬架和被动悬架的动态响应对比曲线如图17所示。

图17 电磁复合式主动悬的动态响应曲线
悬架动态特性仿真数据分析如表4所示。
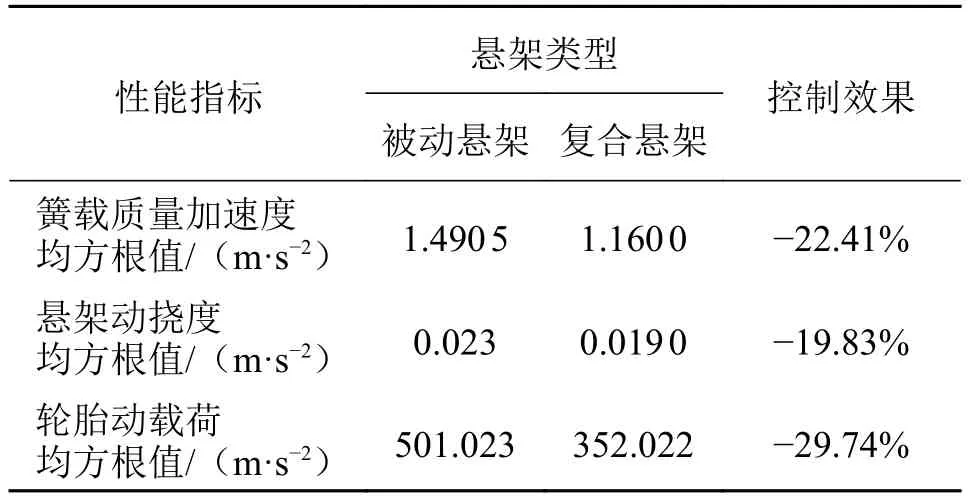
表4 悬架动态响应仿真数据分析
由图17可知:复合悬架与被动悬架的簧载质量加速度,悬架动挠度和轮胎动载荷的响应曲线基本一致,只有在波峰波谷处有较大差异。由表4可知,复合悬架相较于被动悬架,簧载质量加速度均方根值降低22.41%;悬架动挠度均方根值降低19.83%;轮胎动载荷均方根值降低29.74%,表明复合悬架能大幅度改善汽车的行驶平顺性与操纵稳定性。
5 结论
本文针对电磁直线复合作动器(EMLHA)的主动悬架系统,设计了复合悬架3种工作模式的切换策略,通过仿真分析验证了所设计控制策略的有效性;为保证EMLHA主动悬架的馈能、半主动和主动模式的电路实现,设计了一种可实现悬架充放电双向流动的可变电压源系统,通过仿真分析验证了其有效性。主要结论如下:
1) 所设计的AC-DC与DC-DC相结合的可变电压源电路系统及其控制策略,通过仿真分析可实现复合悬架的馈能模式、半主动模式及主动模式的实时切换。
2)电磁复合悬架相较于被动悬架,簧载质量加速度均方根值降低22.41%,表明车辆平顺性得到改善;悬架动挠度均方根值降低19.83%,表明车辆安全性能得到了提高;轮胎动载荷均方根值降低29.74%,表明车辆操纵稳定性得到了提高,因此电磁复合悬架有更好的动态特性。
3)电磁复合悬架回收悬架振动的部分能量,相较于主动悬架消耗的能量减少30.7%,降低了使用成本。
猜你喜欢
出版人(2022年11期)2022-11-15 04:30:18
装备制造技术(2020年11期)2021-01-26 00:38:58
北京汽车(2016年6期)2016-10-13 17:07:50
通信电源技术(2016年5期)2016-03-22 01:09:37
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
电源技术(2015年9期)2015-06-05 09:36:07
振动、测试与诊断(2014年6期)2014-03-01 01:14:59
汽车维护与修理(2014年10期)2014-02-28 12:15:00
机械与电子(2014年2期)2014-02-28 02:07:44