机器人辅助系统在眼底手术中的应用
2022-04-15 02:14:36林梓豪许可正李强林浩添审校
眼科学报 2022年3期
林梓豪,许可正, 李强,林浩添 审校
(1.中山大学医学院,广东 深圳 518107;2.中山大学中山眼科中心,眼科学国家重点实验室,广东省眼科视觉科学重点实验室,广州 510060)
机器人辅助系统(robot auxiliary system,RAS)是以机器人为主体,整合了引导系统、稳定系统和监测系统等相关技术,并可以应用于各领域的智能化系统。近年来,人工智能成为医学领域的一大研究热点。在眼科领域,基于人工智能技术的RAS在眼底手术的相关应用研究对于眼科的发展具有重大意义。
与其他外科手术对比,眼底手术具有显微、低创、高精度的特点。以玻璃体视网膜手术为例,人眼视网膜显微手术的精确度最低需要达到20~40 μm的幅度[1],但是人体由于自身生理结构导致的自发的、不可避免的震颤可达到100 μm的幅度[2]。因此,对这一极其微小、脆弱的组织进行显微手术操作,对眼科医生而言是一个巨大的挑战。然而,影响眼科手术效果的因素除了眼科医生的技术水平、不可避免的生理性震颤,还有术中不佳的手术视野。特别是后者这一限制条件,因缺乏辅助技术的支持,许多眼科医生完全依靠视觉反馈进行手术,外加难以把握的手术应力,导致术中的操作具有极高的风险性[1,3-4]。因此,为了提高手术的安全性、精确度,眼科医生需要高精确性、高稳定性的辅助技术来协助他们实现对力和振动的极佳控制,从而协助他们完成视网膜剥离、视网膜下治疗和视网膜静脉插管等要求极其精细的手术。而RAS在眼底手术的应用,可能成为这一难题的解决方案。
1 手术机器人在眼底手术当中的应用
1.1 手术机器人的引导系统
手术机器人的引导系统,即视觉引导系统,旨在通过数字成像技术将手术视野清晰化、扩大化,以便于医生进行精准的手术操作。手术机器人的引导系统主要基于光学相干断层扫描(optical coherence tomography,OCT)技术和平视技术。
1.1.1 OCT
最初,OCT替代了传统的眼底成像技术,主要用于黄斑病变等眼底疾病的高分辨率成像,极大地提高了眼底疾病诊断的效率和准确性[5]。近年来,OCT的应用范围大大拓展,如用于手术暂停期间的手持式OCT、实时二维OCT成像和实时三维OCT成像等。
在眼底手术暂停期间,眼科医生可以运用手持OCT探头(hand-holding optical coherence tomography,HHOCT)完成视网膜术中OCT(intraoperative optical coherence tomography,iOCT)。如Bioptigen HHOCT设备将1个手持成像探头,通过柔性光纤连接到便捷式手推车上。该探头能以17千次扫描的速度生成轴向分辨率为5 μm的断层图像。眼科医生只需要将探头放置到距离患者角膜约2 cm的地方,加以倾斜便可以获得患者视网膜的高清成像。与传统的桌面扫描仪不同,HHOCT能够对手术中处于仰卧体态的患者进行视网膜成像。这一特点也更符合手术室这一应用场景。HHOCT这一技术的应用,不仅大大扩展了眼科医生在手术中的视野,更降低了因分辨率低的成像而导致手术事故的可能性。但其主要缺点在于,成像过程中显微镜必须离开患者,这限制了手术停顿的时间。
实时二维OCT 成像运用的核心技术为显微镜集成O CT(microscope integrated opt ical coherence tomography,MIOCT),即可以同时运用显微镜和O CT对人体视网膜进行成像。这两种模式实现了显微镜物镜与二色镜的共对准,使得显微镜与O CT可以聚焦在同一平面上,因此可以更容易地获得显微镜焦平面内的高质量OCT图像。同时,MIOCT系统还可以与双目间接眼科显微镜(binocular indirect ophthalmology microscope,BIOM)兼容,用于视网膜手术的宽视野成像,手术过程中获取的图像也会实时显示在计算机显示器上,利于将手术视野实时反馈给眼科医生。MIOCT相比于HHOCT而言,既保持了后者的优势,又克服了其缺点——即MIOCT不需要将显微镜移开患者。实时三维O CT成像是对MIOCT技术的一大革新。其核心技术为定制的超高速OCT(super speed optical coherence tomography,SS-OCT)系统,运行速度相比MIOCT快了3~5倍,并配备有定制图形处理单元(graphics processing unit,GPU),可以实时获取、处理和渲染图像。此外,SS-OCT还可以集成立体平显,即4D MIOCT,实现显著增强的体积组织变形的可视化,这有助于识别手术干预后黄斑3D结构的变化[6]。3种OCT技术的对比总结如表1。
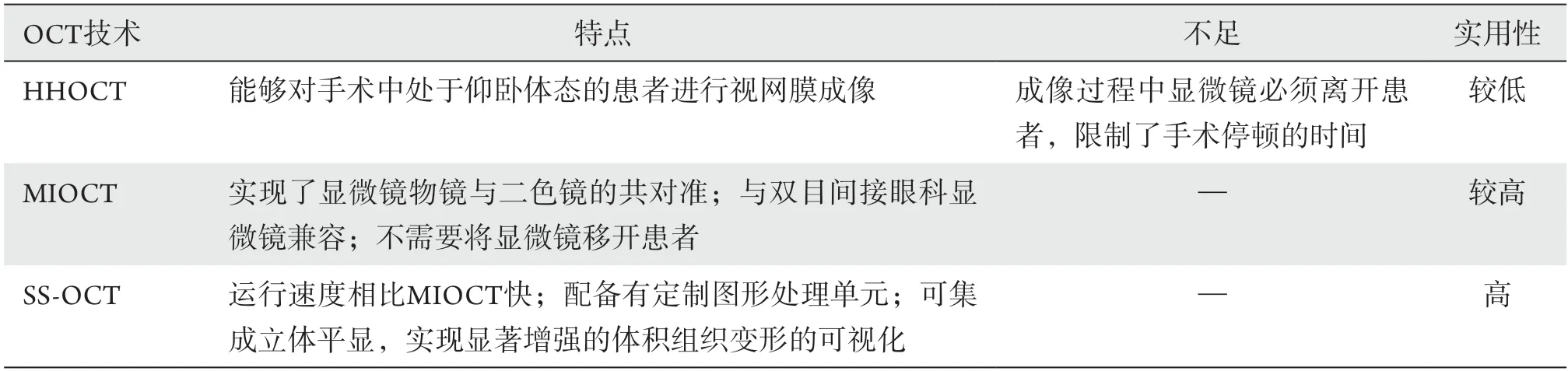
表1 3种OCT技术的对比Table 1 Comparison of three kinds of OCT technology
目前O CT技术的发展十分可观。如2019年8月,上海驻马店眼科医院李云鹏院长助理的眼底前后联合手术使用了先进的RESCAN 700 OCT技术,该技术增加了视网膜血流成像功能,能够在无创的情况下获得清晰的血流图像,有效地提高了黄斑前膜、黄斑裂孔、黄斑劈裂手术的精准性,从而降低致密玻璃体积血的二次手术率[7]。当前OCT的研究热点主要在于进一步研发更加先进的成像技术,集成深度学习算法,以实现图像的全自动化分析和处理。如角膜成像系统集成了眼前节光学相干层析成像(anterior segment-optical coherence tomography,AS-OCT)、支持向量机(support vector machine,SVM)和角膜形状的自动决策树分类算法[8]。
1.1.2 平视技术
平视技术最早应用于飞机飞行甲板[9],它可以使飞行员能够以“平视”的姿势查看数据,而不必低头看仪表盘,从而保证了飞行的安全性。如今,平视技术也运用到眼科手术中。在平视外科手术中,眼科医生不是通过显微镜目镜来进行手术,而是通过观察3D相机投射到大型平板显示器上的显微图像进行手术。这一手术方式与传统手术相比,使得眼科医生在手术中可以采取更舒适的直立或略微向后倾斜的坐姿,而不是需要始终保持略微前倾的坐姿,这大大减轻了眼科医生在进行长时间精细手术时颈部和背部的疼痛。
平视技术还可以与电子放大摄像机进行结合,来调节术中视野的亮度。此外,对于一些玻璃体切除手术,特别是为有密集的玻璃体出血、不透明介质或有深色眼底的患者做手术时,电子放大摄像机的介入可以降低20%以上的曝光度,这对于识别难以辨认的视网膜结构非常有帮助[9]。然而,由于图像信号放大,采用平视技术显示的图像分辨率相较于传统显微镜观察可能稍有降低。针对这一个缺陷,Renato团队[10]发现并验证CMOS摄像头以及OLED屏幕的引入,可以弥补分辨率下降,使得图像质量仍然保持最佳状态。
1.2 手术机器人的稳定系统
视网膜手术工作空间狭小,组织脆弱,手术的顺利进行离不开眼科医生高精度的精细操作。而各种难以控制的因素,如生理性震颤、疲劳、患者活动等很可能会导致眼科医生的操作失误,进而引发医源性事故。
手术机器人的稳定系统,可以降低眼科医生手术时的生理性震颤,稳定手术仪器,从而大大提升手术的安全系数和成功率。我国研究团队[11]开发的“稳定手”眼机器人(“steady hand”eye robot,SHER)融合了主动介入机器人系统(active interventional robot system,AIRS),其核心为具有长短期记忆(long and short term memory,LSTM)单元的递归神经网络(recurrent neural network,RNN)。RNN可以对眼科医生即将为眼球施加的手术应力进行预测和分类:首先以预测的手术应力为输入值(包括大小、方向、角度等),其次对输入值进行预测分析,然后将手术应力分为“安全”和“不安全”两类,最后,如果预测结果为“不安全”时,SHER便可以通过初始线性导纳控制来驱动机械手以减小手术应力(图1)。据评估,徒手操作的不安全作用力比例高达26%,而AIRS可以将视网膜手术中不安全的作用力比例控制在3%以下[11]。
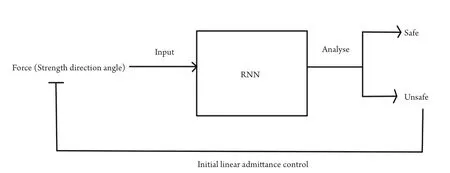
图1 RNN递归神经网络在手术应力预测分析中的应用原理Figure 1 Application principle of RNN recurrent neural network in the prediction and analysis of surgical stress
在类似于SHER的稳定系统的协助下,一些传统难以进行的眼底手术可以成为现实。以视网膜静脉阻塞(retinal vein occlusion,RVO)为例,RVO 是由一条或多条视网膜静脉阻塞引起的致盲疾病。目前,临床上RVO的治疗方案只注重对症治疗以减轻患者的痛苦,但并不能根治这一疾病。唯一有可能治愈RVO的便是视网膜静脉插管手术。视网膜静脉插管手术是一个实验性的眼底手术,其主要思路是在视网膜静脉中注射抗凝剂来解除静脉阻塞。然而,视网膜静脉的直径十分微小,管壁也十分脆弱,眼科医生对其定位精度有限,人工手术被认为风险太大。因此,为了保证患者的安全,眼科医生便放弃了传统的插管手术。
为突破这一限制,世界各地的研究机构开发出了相当数量的机器人原型,它们大致可细分为3种:手持设备、共操作系统和遥感操作系统[12]。手持设备的主要作用是通过主动补偿手部震动和提供有限的运动比例来提高精确度。如美国西北大学开发的Micron系统[13],该系统由一个位于手柄和手术工具之间的微型Stewar t平台和一个光学跟踪系统组成。眼科医生可以保留对手术器械的直接控制,而该系统为其提供了诸如精确度增强、眼球稳定和器械固定等辅助功能。这些辅助功能显著降低了眼科医生施加在手术切口上的切向净力,从而最小化术中眼球的旋转,降低手术事故的发生率。此外,Gijbels团队[14]也开发了一个共操作系统以及摇杆操作系统。与前述的手持设备类似,这些系统可以通过机械或软件将仪器的自由度限制在每次至多只能围绕切口旋转3圈,而且还可以通过切口平移来实现眼球稳定,使得眼底手术的精确度提高了10倍以上。
此外,在国内外医学交流中被屡屡提及的荷兰眼科手术机器人Preceyes BV也具有强大的稳定系统。Preceyes BV手术系统集成于手术台上,由运动控制器(motion controller,MC)和固定手术器械的台式机械操纵器(instrument manipulator,IM)等精细部件组成(图2)。外科医生启用运动控制器上的离合器后,可以激活MC与IM之间的耦合,并在用于过滤手术震颤的编程协议、动态运动缩放、可调节的虚拟边界和可以冻结眼睛内仪器位置的离合器机制等功能的相互配合之下,可以减少视网膜静脉插管手术中的震颤程度,因而让外科医生成功地将插管和药物输送到直径仅有80 μm的视网膜静脉当中。这一创举超出了人工手术的极限[12,15]。
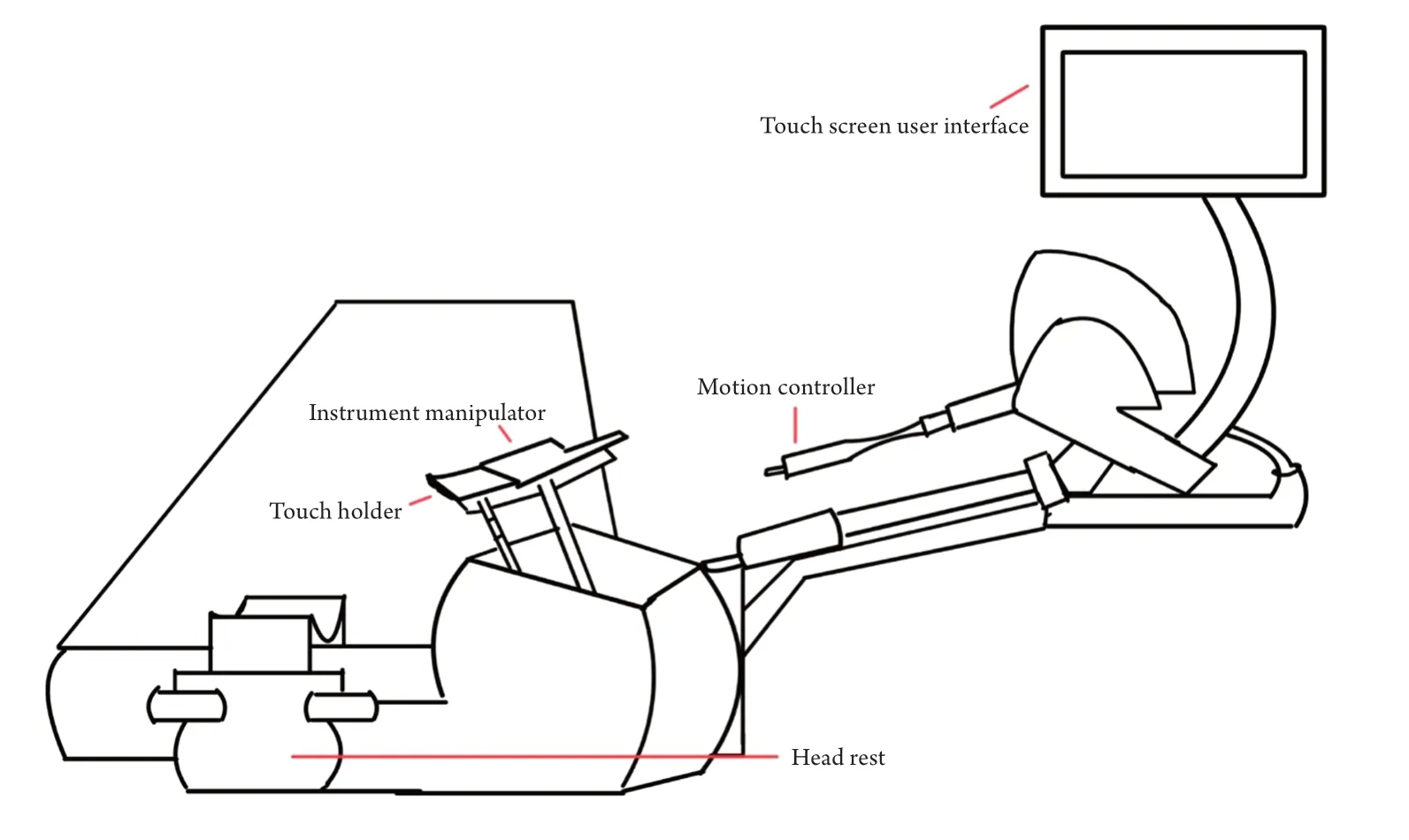
图2 Preceyes BV手术系统的组成Figure 2 Composition of Preceyes BV Surgical System
2018年的一篇报告[16]指出Preceyes BV辅助视网膜手术的首次人体研究取得了一定的成果,研究结果表明:虽然相较于人工手术,机器人系统参与的手术用时较长,但后者在手术中的微出血情况更少,也更为安全。目前,Preceyes BV系统已被多个国家的眼科医院所引进。
机器人稳定系统辅助于眼底手术,让仅存在于理论中的高难度高危险的眼底手术应用到现实中成为可能,也让更多的眼底疾病拥有了治愈的希望。
1.3 手术机器人的监测系统
除上述的引导系统和稳定系统,手术RAS还有实时监测手术应力的监测系统。监测系统主要监测手术中不恰当的手术应力,并通过各种信息传递方式告知手术者,从而避免手术者的危险操作和手术事故的发生。
由Kuchenbecker等[17-18]开发的VerroTouchTM便是一个优秀的手术机器人监测系统,它通过连接到无菌帘下方的达芬奇S机器人系统臂上,通过分析机械臂运动中的加速度并实时处理数据,再通过自然高频振动反馈和立体声反馈给外科医生。经体外研究表明,运用VerroTouchTM监测系统可以最大限度地减少组织应力,改善眼底手术结果。
此外,上述的SHER 也具有较好的监测系统。SHER配备了基于光纤布拉格光栅(fiber Bragg gratings,FBG)传感器的智能工具,其功能在于测量手术应力、工具插入深度和刀尖接触力,并将应力的施加情况以力反馈技术结合音频的形式反馈给眼科医生。如此一来,眼科医生便可以根据实际手术情况来实时调整力度和方向等,从而避免对相关眼球组织的损伤[11]。
监测系统与前述的引导系统、稳定系统相辅相成,互相配合,使得整个RAS运行合理,进一步保障眼底手术的安全性。
2 结语
手术机器人在眼底手术中的应用与发展具有极大的潜力——手术机器人所配备的三大系统,极大地帮助眼科医生正确定位以及采取合适的应力与方向,让以往人工手术无法实现的成为现实。然而,目前手术机器人的研究仍处于早期阶段,要实现手术机器人的广泛应用仍存在着许多困难和挑战。比如手术机器人引导系统中的平视技术采用的是3D相机实时成像,而一些眼科医生不能很好地适应3D图像,容易产生眩晕感,引起身体不适;此外,手术机器人研究成本过高,缺少足够的资金支持,以及眼科医生学习操作手术机器人需要相应的时间成本等。
未来眼科手术机器人的发展趋势,主要聚焦在与深度学习算法的紧密结合,通过机器学习不仅可以做到对手术中的图像进行预测、分类、优化,使手术成像质量更为优质,扩大手术视野,还可以进一步优化对手术应力与方向的可行性的评估和调节以及寻求更先进的监测反馈技术等,从而让高精度的眼科手术更加高效、安全。同时,手术机器人还可以在手术流程评估这一领域中寻求发展,例如通过数据分析提取医生的操作偏好,进而将操作流程规范化,加快手术技术的传承等。
开放获取声明
本文适用于知识共享许可协议(Creative Commons),允许第三方用户按照署名(BY)-非商业性使用(NC)-禁止演绎(ND)(CC BY-NC-ND)的方式共享,即允许第三方对本刊发表的文章进行复制、发行、展览、表演、放映、广播或通过信息网络向公众传播,但在这些过程中必须保留作者署名、仅限于非商业性目的、不得进行演绎创作。详情请访问:https://creativecommons.org/licenses/by-ncnd/4.0/。
猜你喜欢
新作文·高中版(2022年4期)2022-12-26 20:15:45
现代仪器与医疗(2022年2期)2022-08-11 09:53:56
新作文·高中版(2022年4期)2022-07-31 10:19:46
中医眼耳鼻喉杂志(2021年1期)2021-07-22 07:38:28
中医眼耳鼻喉杂志(2021年2期)2021-07-21 08:53:34
海燕(2020年3期)2020-11-22 08:56:59
视野(2019年22期)2019-12-02 03:59:34
益寿宝典(2018年36期)2018-01-27 19:59:04
湖南中医药大学学报(2016年1期)2016-12-01 04:08:18
中国眼镜科技杂志(2016年8期)2016-11-26 00:25:22