
基于射频技术与智能动作识别的人员身份认证方法研究
2022-04-13 11:44王溢清
电子设计工程 2022年6期
王溢清
(河北北方学院附属第一医院,河北张家口 075000)
随着物联网技术的发展,医疗机构使用单一的人员身份认证方式已无法保障其环境和信息的安全,如何提高身份认证的可靠性是目前亟需解决的问题[1]。当前,常用的IC 卡身份认证技术已较为成熟。随着人工智能技术的兴起,出现了一些基于人脸或指纹等生物特征识别的身份认证方式[2-3]。文献[4]提出了一种基于指纹的身份识别方法,而文献[5]在指纹识别的基础上,引入静脉特征加强了对身份认证的可靠性。但上述两种方法均采用单一特征认证,容易受到欺骗攻击。文献[6]提出了一种基于活体人脸检测的身份识别安防系统,能有效识别欺骗攻击,但识别效率仍有待提升。
因此为了能够快速、准确地实现人员身份认证,该文提出了一种基于射频技术与智能动作识别的身份认证方法。将无线射频识别(RFID)技术与基于深度学习的智能动作识别方法相结合,经长短时记忆网络(LSTM)处理分析得到人员的身份信息。
1 RFID识别
RFID 是一种非物理性接触、低成本、低功耗的自动识别技术[7]。典型的RFID 系统由标签、读写器和后端服务器(应答器)三部分组成,如图1 所示。

图1 RFID系统的结构
在RFID 系统中,应答器根据认证条件判定该标签的合法性,以实现人员身份认证。通常应答器分为无源和有源两种,无源应答器的能量是从读写器的磁场或电场中获取。为了保证这种供电方式,读写器必须提供足够的电源,且读写器与应答器之间的距离是有限的。有源应答器有一个内部电源,这使其能够自主通信并增加了读写器与标签之间的工作距离[8]。
此外,RFID 系统通常采用数字调制方式,如幅移键控(Amplitude Shift Keying,ASK)、频移键控、相移键控等。在无源RFID 系统中,读写器采用一种ASK 调制方式。其是基于开关键控的特殊编码方法,同时应答器不主动通信[9]。相比之下,有源RFID应答器能够自主供电,降低了发射功率并增加了通信范围。
2 基于深度学习的智能动作识别
在人体智能动作识别过程中,首先利用循环神经网络(RNN)提取出图像的轮廓。然后,采用t-分布随机邻域嵌入(t-SNE)技术将检测到的轮廓变换到低维空间,并通过K-means 聚类分析得到图像动作特征,实现双向匹配与类论证[10]。最终,利用支持向量机(SVM)分类器对所得到的动作进行识别,同时将自适应模块应用于识别样本以外的动作。因此,基于深度学习的智能动作识别流程如图2 所示。

图2 基于深度学习的智能动作识别流程
2.1 预处理模块
在检测预处理环节,该文利用了RNN 进行图像学习,即使目标在一段时间内为潜在的类型,也能被成功检测到。其中,RNN 利用递归结构对时间序列的上下文信息进行建模,从而在未展开的网络中产生循环连接。
给定一个输入序列x=(x0,x1,…,xT-1),循环层的隐态h=(h0,h1,…,hT-1),则RNN 单个隐含层的输出y=(y0,y1,…,yT-1)可表示为:

式中,ωxh、ωhh、ωho分别为输入层到隐藏层、隐含层自身、隐含层到输出层的连接权重;bo和bh是偏置量;φ(∙)与σ(∙)分别是隐含层和输出层的激活函数。
2.2 转换模块
转换模块的作用在于图像降维以及特征的提取,其中利用t-SNE 对提取的轮廓序列进行降维重构[11]。且类标签信息的嵌入增加了类内相似度,降低了类间相似度,从而有效提高了识别率。在转换过程中,首先将变换后的低维特征转化为视觉词包,然后利用K-均值聚类将所有相似的动作进行聚类,最终通过在双向匹配中加入类确定性度量值来实现相似动作识别。
2.3 分类模块
SVM 是一种有监督学习的分类方法,分类性能优越,但其是一个两类分类器,因此在分类多类标签方面仍存在不足[12]。同时,最近邻分类器通过识别最近邻的动作实现动作分类,其误分类的可能性较小。故将SVM 与最近邻分类器相结合,以构成邻域分类器进行动作分类,其动作识别率更高。
2.4 自适应模块
由于现有的大部分识别系统均无法学习动态背景,因此在该系统下,当数据库中现有的视觉词包与获得的新视觉词不匹配时,通过计算动作的确定性度量值实现自适应调整[13-14]。具体而言,当类确定性度量值小于固定阈值且可视词不在现有存储库中时,将为该轮廓分配一个新的动作类标签并存储[15]。通过转换所发现的两个相似视觉词包,计算得到两个新的度量。当存在新动作时,这两个新度量将高于先前计算的确定性度量,从而使系统能够将其标识为新动作并添加到存储库中。
3 身份认证方法设计
当前人员身份认证的方式大多采用RFID 卡,通常情况下医院内部为医生均分配了相应的职工卡。但RFID 卡是物理实物,只要持卡即可,非本人也能使用。为了提高身份认证的可靠性,该文引入了智能动作识别技术。通过识别动作属性与RFID 卡辨识结果,共同判定人员的身份信息。该文所提出的基于射频技术和智能动作识别的人员身份认证系统的框架设计,如图3 所示。
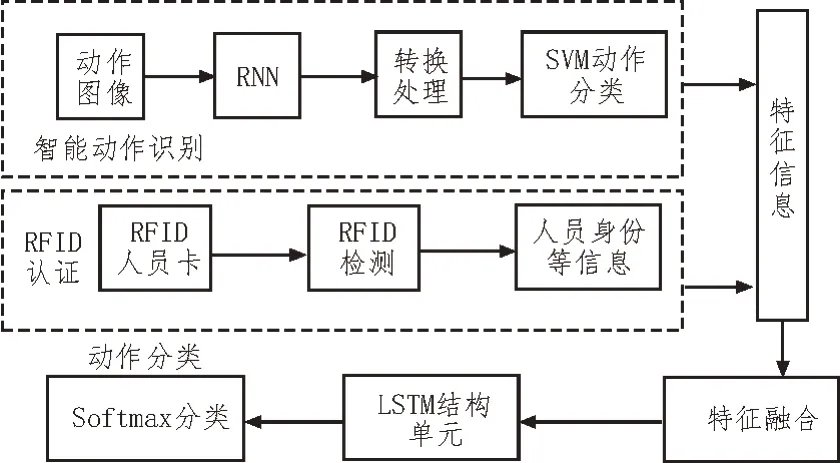
图3 身份认证系统的框架设计
医院工作人员在刷卡时,RFID 卡读写器能够将人员基本身份信息和工作地点信息读出。同时图像识别系统会获取人员的动作信息,并提取特征。然后将两者的信息进行融合,共同输入LSTM 进一步提取人员信息。最终利用Softmax 进行分类,实现身份认证。
3.1 LSTM
单个LSTM 存储单元包含一个自连接存储单元ϕ和三个乘法单元,即输入门i、遗忘门f和输出门o,其用于存储和访问时间序列的远程上下文信息[16]。LSTM的结构如图4 所示。

图4 LSTM的结构
存储单元和3 个门的激活如下所示:

式中,σ(∙)是Sigmoid 函数,所有ω均是两个单元之间的连接权重。
3.2 身份认证流程
系统软件的整个身份认证流程如图5 所示。

图5 人员身份认证的总体流程
首先读写器会定期检测是否有RFID 卡,并不断刷新系统显示。当检测到RFID 卡时,系统首先检索卡内的人员信息,若不一致,则会提醒重新确认信息。然后采集人员的动作信息根据智能动作识别方法完成动作分类,并将相关数据存储、同步到服务器中。若动作信息与系统内一致,则再次结合RFID 卡信息,共同判定人员身份。若匹配成功,则打开门禁系统并存储相应信息。
所提的认证系统在运行过程中不会占用较多资源,且一次性从数据库中提取信息,极大提高了验证速度。同时,还解决了采集其他生物特征过程中存在侵犯性和消耗时间过多的问题。
4 实验结果与分析
实验采用基于Python 深度学习框架的PyTorch平台,硬件选用Intel Core i7 3.10 GHz CPU的服务器。同时,采集某医院的人员信息数据库作为样本,该数据库中包含了120 名具有特征差异的人员信息。
4.1 智能动作识别性能
由于所提方法结合射频技术和智能动作识别技术,而射频技术主要由硬件设施完成,目前已较为成熟。因此,智能动作的识别效果是进行准确身份认证的前提。基于RNN的自适应动作识别准确率如图6 所示。

图6 智能动作识别的准确率
从图6 中可以看出,当迭代次数在100 以内时,识别准确率快速增长,随后增速放缓;当迭代次数达到1 200 时,识别准确率趋于稳定,大约为92%。因此基于深度学习的智能动作识别方法是有效的,具有较为理想的识别性能。
4.2 身份认证性能分析
在测试数据库120 位人员信息中,选取12 位进行实验。身份认证结果准确率与认证时间,如图7所示。

图7 身份认证准确率与时间
从图7 中可以看出,大部分人员的认证准确率均达到了90%,个别人员的认证准确率较低,主要是因为角度或遮挡等情况。同时所提方法完成认证的速度较快,大多数均不超过40 ms,最快仅为20 ms。由于其采用了数据的降维处理,且RFID 卡的识别过程较为迅速,因此整体识别速度较为理想。
4.3 与其他方法的对比分析
为了论证所提方法的性能,将其与文献[4]、文献[6]、文献[9]在认证准确率和速度两个方面进行对比分析,结果如表1 所示。

表1 认证准确率和时间的对比结果
从表1 中可以看出,相比于其他对比方法,所提方法的识别准确率更高,为94.51%。由于该文方法结合了RFID 技术和智能动作识别技术,其能够较好地保证识别认证准确性。认证时间为31 ms,其速度优于文献[6]和文献[9]。而文献[4]仅利用CSI 指纹完成身份认证,由于方法单一,故认证速度较快,但认证准确率较低,仅为84.69%。文献[9]基于区块链技术完成身份管理,由于其技术较为复杂,因此认证速度较慢,但准确率有所提升。综合认证准确率和速度两个方面来看,所提方法能够实现快速且高准确率的身份认证。
5 结束语
随着信息技术的不断发展以及公共卫生安全的防护需要,医疗机构对人员的管控日趋严苛。为此,该文提出了一种基于射频技术与智能动作识别的人员身份认证方法,从而确保人员的精准管控。所提方法结合了RFID和基于深度学习的智能动作识别技术,将两者的信息共同输入LSTM 进行分析,以综合判定人员身份。基于Python 仿真平台利用所提方法对某医院的人员数据集进行测试,结果证明所提方法的身份认证综合性能良好。但由于该方法尚未考虑光照、噪声等因素的干扰,实验环境过于理想化。故在接下来的研究中将重点考虑各种环境因素的影响,使方法更具实用性。
猜你喜欢
广东教学报·教育综合(2022年45期)2022-05-05
铁路通信信号工程技术(2021年12期)2021-12-31
电子制作(2021年11期)2021-06-17
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
健康体检与管理(2021年10期)2021-01-03
铁道通信信号(2020年9期)2020-02-06
电子制作(2017年19期)2017-02-02
创新科技(2014年16期)2014-07-27
