
对超声波细胞粉碎机频率跟踪技术的研究
2022-04-12 04:04:22翁芸李伟
电子制作 2022年7期
翁芸,李伟
(宁波职业技术学院,浙江宁波,315800)
0 引言
自动频率跟踪技术对超声波细胞粉碎机的高效稳定运行发挥着重要作用[1]。锁相式频率跟踪技术因其具有良好的窄带特性,且换能器电压、电流的波形好坏对频率跟踪影响不大等原因,被广泛应用在它激式大功率超声设备中,但这种频率跟踪技术也有缺点,其一、它会因换能器具有多个谐振频率而出现误跟踪,这时频率死锁于锁相环频率的顶端或换能器的二次谐波,致使设备工作异常。第二、因换能器的电抗无法完全匹配,剩余的电抗导致锁定的频率偏离换能器串联谐振频率,使得换能器工作效率降低。本文通过分析换能器的电路等效模型,采用MATLAB软件计算出锁相环锁定时相位差对频率和输出功率的影响,设计出采用数控移相电路实现频率微调的复合式频率跟踪控制系统,并通过实验验证其可行性。
1 压电换能器的等效阻抗特性
超声波压电换能器是超声振动系统的主要组成部分,由电学臂支路和机械臂支路两部分组成,可视为非线性容性负载,其静态等效电路[2]如图1(a)所示,表1为各部分等效情况[3]。其复阻抗和相位角计算公式为:


表1 超声波压电换能器的静态等效
当换能器在正常工作的时候,机械臂L1、C1所在支路产生串联谐振,此时换能器等效电路如图1(b)所示,表现出一定的容抗特性。为保证发生器主功率系统与换能器系统之间最有效地进行能量传输,必须建立合理的匹配网络,以改变负载的阻抗特性。

图1 压电换能器等效电路
2 移相式锁相环频率跟踪的基本原理
在实际应用中发现,换能器的谐振频率变化有瞬时和缓慢两种形式。当负载突然变化时,换能器的谐振频率也立刻变化,而当换能器的温度缓慢变化时,其谐振频率也跟着缓慢变化,对于不同的变化形式,可以采用不同的频率跟踪方法如对于瞬时频率跟踪采用锁相跟踪方式效果较好,而对于换能器因温度及性能一致性差等原因引起的的谐振频率漂移用电流反馈来跟踪则更合适,如果采用两者相结合的办法可以解决锁相跟踪易失锁和电流反馈式响应速度慢的缺点。由此可见复合式跟踪法综合了各种频率跟踪方法的优点且弥补了各自的缺点,使得频率跟踪更加可靠。本设计采用锁相环跟踪和电流反馈跟踪相结合的复合式频率自动跟踪方式,其中电流反馈跟踪通过线性移相电路实现。
从谐振频率附近的压电换能器等效电路分析得知,当压电换能器处于谐振状态时,加在其两端的电压信号和流过其中的电流信号的相位是相同的。当激励信号的频率偏离换能器的谐振频率时,换能器工作于失谐状态,其两端的电压信号与流过其中的电流信号不再同相位。此时将换能器两端采样得到电压和电流信号,送入到鉴相器,由鉴相器比较输入信号与输出信号之间的相位差,产生误差信号[4],经低通滤波器形成激励振动系统谐振频率变化的控制信号,朝着减小相位差的方向改变压控振荡器的频率,使之与输入信号频率相同,让换能器工作于电压与电流同相状态,就是锁相压控振荡方式的理论依据。
由图2可知,设电流相位为θ(i),电压相位θ(v),电流移相后的相位为θ(i)´,设θ(i)´=θ(i)+Δθ,按照锁相环工作原理,锁相环路根据输入电流和电压信号的相位差改变压控振荡器的频率,减小二者的相差,最终使电流和电压相位为0。即θ(i)´-θ(v)=0,把θ(i)´代入公式得:θ(v)=θ(i)+Δθ,可推论出锁相环频率一旦锁定,换能器的电压和电流之间会存在Δθ的相位差值。

图2 移相式锁相环频率跟踪结构图
在上述θ(ω)公式中,取C0=8nf,C1=72pF,R1=20Ω, L1=89mH,用MATLIB仿真得相位差和频率之间的关系如图3所示。
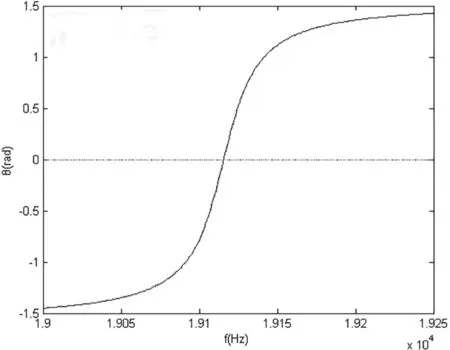
图3 相位差与频率的关系图
由图4可见,Δθ和f在谐振频率的附近成良好的线性关系,调整Δθ大小即可微调f的大小,调整的范围由换能器的参数决定,一般在200Hz左右,用这种移相式频率微调法,不仅解决了锁相环锁定的频率完全由硬件电路决定所导致的频率调整灵活性不高的缺点,还可以如图4所示,通过调整相位差微调输出功率的大小。

图4 相位差与功率的关系
3 自动频率跟踪电路的设计及参数计算
自动频率跟踪电路由信号采样电路、信号整形电路、数控移相电路、锁相环电路及解锁电路组成,主要电路设计如下所述:
3.1 信号采样电路的设计
在超声波电源输出回路中串联电流互感器,用其采样电流信号,采用并联电阻法来采集电压信号,即在换能器两端并联两个大阻值电阻来采样电压信号。
3.2 信号整形电路的设计
如图5所示,该部分由前后两级组成,前级是二阶低通滤波电路,滤除高次谐波信号,后级是过零比较器,把前级输出信号转换为方波信号,传送给CD4046锁相环电路。

图5 信号整形电路
3.3 数控移相电路设计
超声波换能器长时间工作后,因温升等原因其谐振频率会漂移,电源驱动频率也要随之而变化,因此移相电路要能在设备运行过程中,在频率自动跟踪的前提下根据超声波驱动电源电流的大小微调相位。本设计采用线性移相电路,其工作原理为:电流采样信号先经过零比较器变换成矩形波信号;然后将此信号变成频率和相位相同并且幅值恒定的三角波;再通过电压比较器与直流电压比较后实现移相,通过调节直流电压即可调节移相角的大小。这种移相设计使电路受频率影响程度减小,并且有基本的线性特性。电路设计如图6所示。

图6 数控线性移相电路图
本设计采用MAXIM公司的MAX5128数字电位器来调整比较电压,从而实现自动移相的控制。该电位器内有128个分级的22k端到端电阻,用简单的2线上/下型控制接口来对滑动端位置进行编程;MAX5128的相对温度系数只有5ppm/℃,能在-40℃~+85℃温度范围内正常工作。
单片机的P3.0和P3.1口对其进行控制,当引脚DN端为低电平、引脚UP端由高电平变低电平时,可使滑动端位置向上递增;而管脚UP端为低电平、管脚DN端由高电平变低电平时,可使滑动端位置向下递减。由原理图可知递增时数字电位器滑动端电压升高,递减时该电压降低。要编程非易失存储器时,先拉高UP,后拉高DN,然后再把UP和DN管脚由高电平变为低电平即可完成数据存储。MAX5128内部有上电复位电路,上电后则由非易失存储器载入到滑动端的位置[5]。为提高数字电位器的使用寿命,频率跟踪时不要频繁地存储数据,只要保存一个频率跟踪相对稳定的位置,工作时再实时调整。
3.4 锁相环电路设计
本设计选用CD4046锁相环芯片,其原理图如图7所示,根据设计要求频率跟踪范围为17k~22k,取C1=4700pF,根据频率计算公式得R1=12.4k,R2=42.3k,实际电路中取R1为10k电阻和10k电位器串联,R2为30k电阻和10k电位器串联,RP1和RP2用来实现频率微调。图中R14、R15和C8组成低通滤波电路,Vcout为频率输出信号。当锁相环因为各种原因导致换能器谐振频率失锁后,锁相环内部压控振荡器输出频率将死锁于上限频率,这时CD4046的第9脚电压会接近电源电压,当该电压高于LM393同相端电压时,LM393输出为低电平,该信号送到单片机外部中断口线,使单片机进入中断程序,复位锁相环电路,让其重新扫描。

图7 CD4046锁相环电路
4 频率自动跟踪软件设计
本文设计的频率自动跟踪软件包括两个模块,电流检测模块和硬件锁相环工作状态监控模块。电流检测模块可通过A/D转换器,把电流采样信号转换成为数字信号。单片机需实时检测换能器工作电流,测得当前工作电压下的电流最大值,并根据电流值的变化趋势,适当调整电流和电压的相差,维持工作电流的稳定。硬件锁相环工作状态监控模块则实时监控锁相环的工作状态,一旦锁相环失锁则马上执行解锁程序,如果多次解锁后都无法锁定频率,则微调移相电路,如果锁相环恢复正常工作,则保存现在的相差值和工作电流值,为以后的工作状态调整做参考。如果经移相后也无法让设备正常工作,则立即停止工作并报警。锁相环监控程序流程图以及电流检测模块流程图如图8,图9所示。
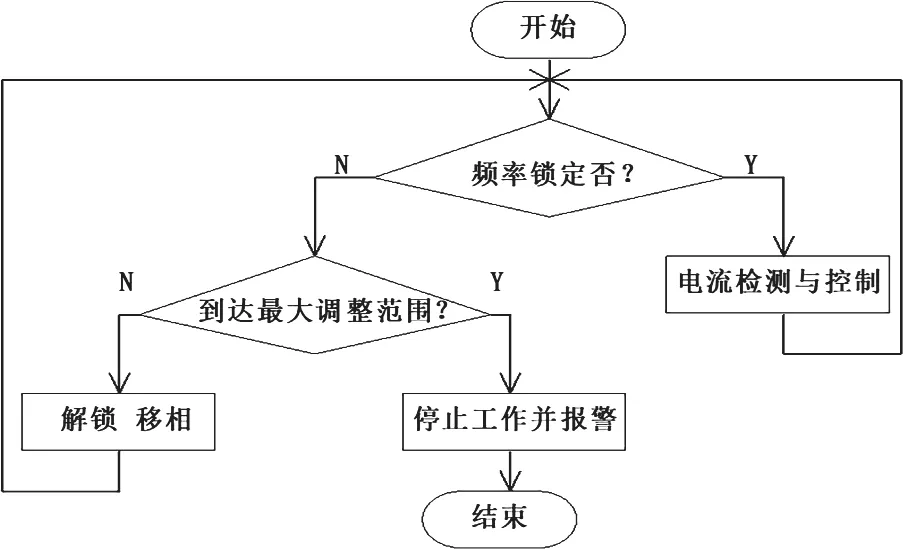
图8 锁相环监控程序流程

图9 电流检测模块程序流程
5 频率跟踪电路实验测试
根据以上的分析,对频率跟踪电路进行实验测试,用DS2072A数字示波器测得频率未锁定前电压和电流波形,图10为未锁定前电压和电流波形图,图11为频率锁定后电压和电流波形。

图10 未锁定前电压和电流波形图

图11 频率锁定后电压和电流波形
图11可见频率锁定后电流相位略超前于电压相位,但换能器输出功率却达最大值。实验还发现增加匹配网络后,工作稳定性明显好于匹配前,且在同等的电压下输出功率也明显提高。图12表示的是在同等电压下通过移相电路测得的串接匹配电感前后频率和输出功率之间的关系,图中失锁频率是在锁定后微调相位情况下测得,可见在相位锁定后,利用移相电路可以微调频率,使换能器到达最佳工作状态。对自动频率跟踪性能测试需要花费很长的时间,因为换能器谐振频率偏移是在一个漫长过程中发生的,工程中可以通过串接不同大小的匹配电感来测试移相式频率跟踪电路的性能,图13为相位未调节和调节后在串接不同匹配电感的输出功率图形,由图可见,通过调整相差值可以微调输出功率。

图12 匹配前后不同相移时的输出功率图

图13 相位调节前后输出功率
6 结论
本设计在锁相控制前端增加数控移相电路,实现相位锁定后的频率微调,实践证明该方法对于换能器谐振频率动态偏移时的频率跟踪有效。通过实验可知,采用锁相环方案进行频率跟踪,尽管主控芯片CD4046具备窄带滤波特性,但还是存在误跟踪现象,为了系统更加可靠稳定,本设计在锁相控制前端设计了数控移相电路,实现相位锁定后的频率微调,对于不同的匹配电感单片机通过数控移相电路总能找到最佳工作点,此时输出功率远大于调节前,而一旦频率失锁,单片机通过数控移相电路微调工作频率,让其恢复正常。同样当负载阻抗变化时,数控移相电路同样可以通过相位差的调节让换能器稳定工作,这种灵活的控制方法使得超声波细胞粉碎机的整体性能得到了明显的改善。
猜你喜欢
电子测试(2018年14期)2018-09-26 06:04:00
电线电缆(2018年2期)2018-05-19 02:03:44
电测与仪表(2017年24期)2017-12-19 05:15:22
家庭影院技术(2017年10期)2017-11-23 03:35:51
声学与电子工程(2017年1期)2017-06-22 11:30:06
声学与电子工程(2017年1期)2017-06-22 11:29:57
雷达与对抗(2015年3期)2015-12-09 02:39:00
电源技术(2015年2期)2015-08-22 11:28:12
电测与仪表(2015年9期)2015-04-09 11:59:28
教育科学论坛(2014年8期)2014-03-01 04:01:54
