基于L1制导法的无人机避障研究
2022-04-08 04:50:30周绍磊刘玄冰祁亚辉代飞扬
兵器装备工程学报 2022年3期
周绍磊,刘玄冰,祁亚辉,代飞扬
(海军航空大学,山东 烟台 264001)
1 引言
近年来,无人机开始广泛应用于情报侦察、定点打击、空中加油等作战场景[1-2],这对无人机航线跟踪能力提出了较高的要求。同时随着现代战争作战环境日益复杂,无人机在处理突发或未知障碍的问题上也将面临巨大挑战[3]。目前许多无人机都具备获取环境信息的方法,例如双目视觉[4]、激光探测[5]等,为无人机避障提供了保障。因此,如何使无人机在航线跟踪过程中顺利避开障碍逐渐引起许多学者的关注。
目前在无人机避障方面应用较多的方法有神经网络算法[6]、遗传算法[7]、A*算法[8]以及人工势场法[9]等。文献[10]中首次提出人工势场法,通过求解虚拟力场中的合力来实现无人机的控制。文献[11]通过改进人工势场法实现无人机自主避障。文献[12]考虑了借助比例导引法思想提高避障性能。这些避障算法虽然能够使无人机避开障碍,但没有考虑航线跟踪过程中遇到障碍物需要频繁切换导引律的问题,存在安全隐患。文献[13]讨论了航线跟踪的情景,但未作深入研究,存在避障过程不够平滑的问题。
为了解决无人机航线跟踪过程中避开突发或未知障碍的问题,本文提出了一种基于L1制导法的无人机避障算法。该方法在L1制导法基础上进行改进,使无人机能够顺利避开障碍物的同时,还能够较好地跟踪目标航线,无需切换导引律,对于无人机实际作战应用具有参考意义。最后本文利用Matlab进行了仿真,结果验证了该算法的有效性。
2 L1制导法
L1制导法[14]是由Park S等人在文献[15]基础上提出的制导算法,并成功应用于固定翼无人机。相比于比例导引法,L1制导法在跟踪曲线路径方面具有更好的性能表现,飞行轨迹也更加平滑。
L1制导法的基本思想是:在目标航线上找到一个与无人机相距L1的参考点,利用该参考点来牵引无人机飞行。具体是在目标航线的一侧作一段圆弧,该圆弧与无人机速度向量相切,圆弧与目标航线的交点即为参考点,根据该参考点可以计算得到横向的加速度指令,参考点的选择如图1所示。

图1 L1制导法参考点选择示意图Fig.1 L1 guidance method
图1中,R为圆弧半径,L1为无人机到参考点的距离,V是无人机水平面速度向量,ascmd为指向圆心的向心加速度,η为速度向量V与线段L1的夹角。
根据几何关系可以得到圆弧R的计算公式为:
(1)
将式(1)代入向心加速度公式,可以得到ascmd大小的计算公式为:

(2)
加速度ascmd的方向取决于夹角η的正负,当参考点在无人机速度方向的左边时,加速度的方向向左,反之加速度方向向右。
经典的L1制导法具备较好的航线跟踪能力,但它并没有考虑航线跟踪过程中无人机避障的问题,存在一定的局限性。
3 无人机避障算法
3.1 避障算法模型
对于航迹上出现明显的大型障碍,由于先验信息较为完整,在航迹规划层面即可对其实现避障。因此,本文主要针对障碍信息不够全面,无法提前探测的小型障碍以及突发障碍设计避障算法。
假设无人机飞行时高度恒定,即无人机在避障过程中始终保持在同一水平面。无人机在飞行过程中通过传感技术探测到前方目标航线上存在障碍物信息时,将会利用传感器探测到的若干障碍物采样点信息生成一个覆盖圆。这个障碍圆包含了障碍物的整体或主要部分,简化了障碍物的细节信息,减小了避障算法的计算量。当探测到的障碍物超过了无人机最大可探测角度时,无人机将在避障过程中持续获取障碍信息,用若干个覆盖圆的组合来表示障碍物。无人机探测障碍物模型如图2所示,图2(a)为无人机对小型障碍物进行探测生成的覆盖圆,图2(b)为无人机对大型障碍物探测生成的覆盖圆组合,γ为无人机最大可探测到的角度。
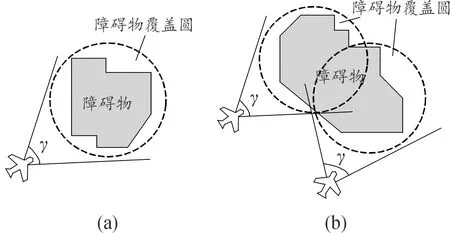
图2 障碍物探测与覆盖圆生成示意图Fig.2 Obstacle detection and cover circle generation
避障算法实现避障的基本思想是:无人机在跟踪目标航线时不断获取前方障碍信息并与自身位置进行比对,当判断当前位置满足避障条件时,无人机开始切换跟踪航线,将覆盖圆的一侧边界作为临时航线。通过引导无人机跟踪临时航线飞行绕过障碍物覆盖区域从而实现避障。在满足结束避障的条件时,无人机将跟踪航线切换为目标航线,避障的基本流程如图3所示。

图3 无人机避障基本流程框图Fig.3 UAV obstacle avoidance flow chart
3.2 避障规则设计
为使无人机在避开障碍物的同时,可以更好地跟踪目标航线,需要设计合适的避障规则,使无人机飞行轨迹尽可能贴近目标航线,无人机避障判断如图4所示。

图4 避障判断示意图Fig.4 Obstacle avoidance judgment schematic diagram
图4中,A和B为目标航线与障碍物覆盖圆的2个交点,O为障碍物覆盖圆的圆心,P为目标航线上距无人机L1处的参考点。当无人机探测到前方目标航线上障碍物位置信息时,通过计算可以得到2个交点A和B的坐标。点P沿目标航线到达点A之后视为开始避障,之后点P将沿圆弧AB移动到点B并结束避障。避障航线由目标航线与圆心O的位置关系决定,目标航线在点O的左侧时,点P沿左侧圆弧移动,反之沿右侧移动,即点P沿AB间较短的航线移动。
该避障算法的预期实现效果如图5所示,图5(a)为无人机正常跟踪目标航线;图5(b)为满足避障条件后,无人机沿障碍物边缘进行避障;图5(c)为避障结束后,无人机继续跟踪目标航线。

图5 无人机避障效果示意图Fig.5 UAV obstacle avoidance effect diagram
4 无人机避障控制的实现
4.1 飞行控制系统
无人机的航线跟踪能力主要取决于飞行控制系统,该系统主要负责生成导航控制指令以及实现无人机的姿态控制,无人机飞行控制系统如图6所示。
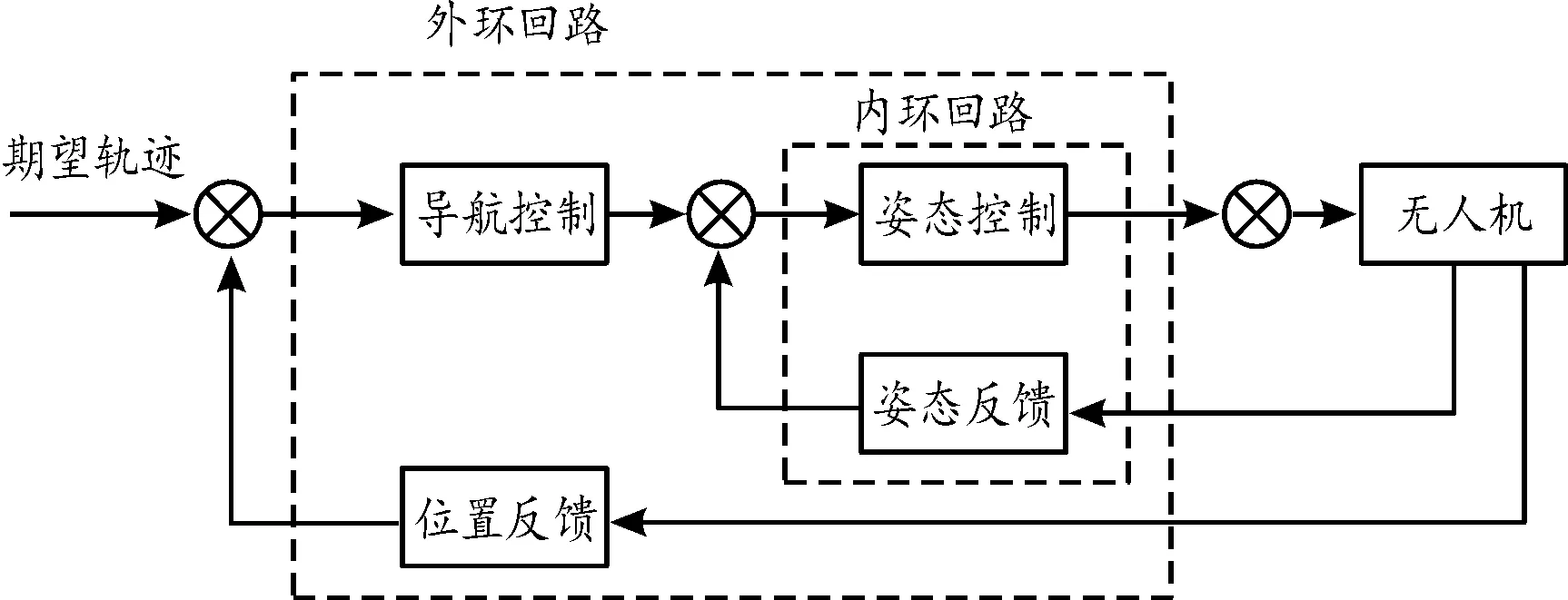
图6 无人机飞行控制系统示意图Fig.6 UAV flight control system schematic
目前无人机飞行控制系统的主流设计方案是将整个系统分为外环导航控制回路和内环姿态控制回路进行分别设计,这种方案的优点是结构简单、物理意义明确且易于实现。其中外环导航控制回路负责根据当前位置和目标航迹实时计算无人机跟踪航迹所需的控制指令,内环姿态控制回路则根据外环给出的控制指令来实现无人机的姿态控制。目前固定翼无人机均采用倾斜转弯方式来进行航迹的调整,故外环导航控制回路输出的控制指令一般为无人机的滚转角。
目前,关于内环姿态控制回路的研究相对成熟,因此本文在不改变内环控制回路的基础上,针对外环导航控制回路进行设计,使其具有避障的功能。
4.2 航线跟踪控制指令计算
根据传统L1制导法可知,要控制无人机跟踪目标航线,需要求得无人机在每一时刻所需的横向加速度指令ascmd。无人机跟踪控制模型如图7所示,无人机在飞行过程中速度大小V保持不变,横向加速度只改变无人机的飞行航向Ψ。
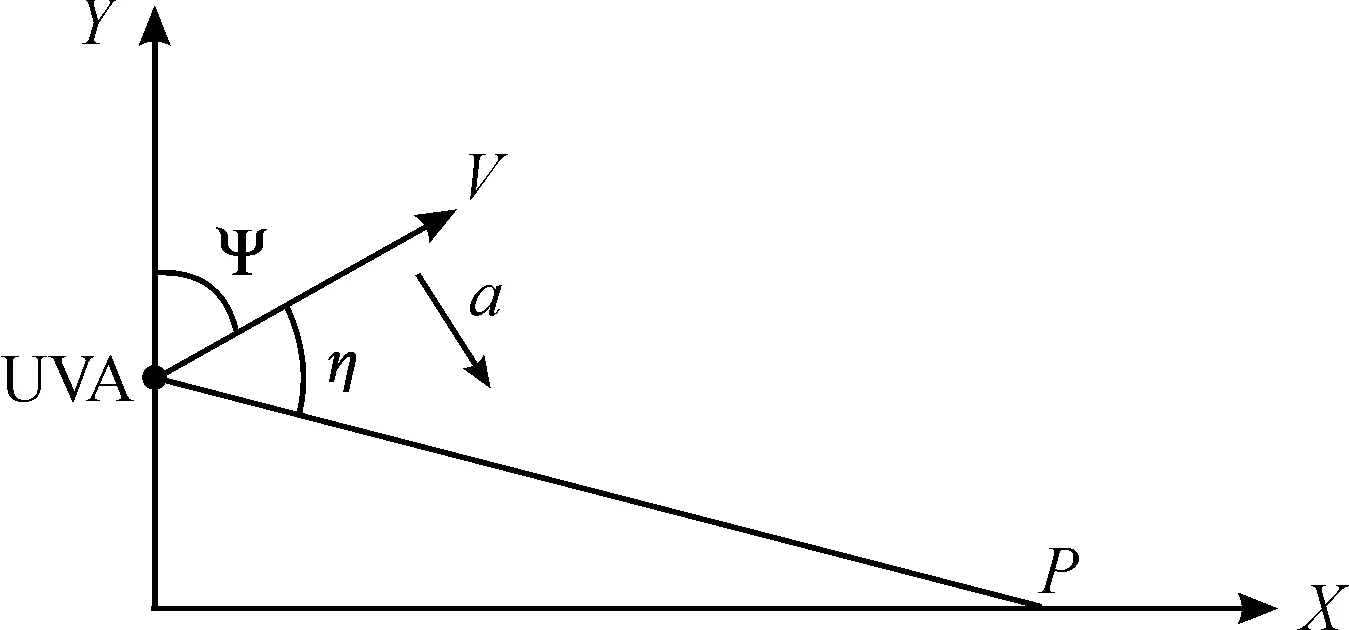
图7 无人机跟踪控制模型示意图Fig.7 UAV tracking control model
由式(2)可知,计算所需的横向加速度a需要知道到速度与L1之间的夹角η,夹角η的计算公式为:
(3)
其中,V可由V和Ψ表示,即:
(4)
L1则由无人机与参考点的相对位置决定,其中无人机的坐标已知,只需计算参考点P落于覆盖圆上的坐标即可求得L1。参考点P的坐标可由无人机坐标和L1与X轴的夹角求得。参考点P位置计算如图8所示,无人机满足避障条件后,以无人机当前位置Q为圆心作半径为L1的圆,该圆与障碍物覆盖圆相交得到2个交点,则参考点P落于2个交点其中之一。其中R为圆心距OQ的长度,α为交点到无人机的连线与线段OQ之间的夹角,β为OQ与X轴之间的夹角。

图8 参考点选取示意图Fig.8 Reference point selected schematic diagram
接下来给出夹角α和夹角β的计算公式为:
(5)
(6)

由于导航控制回路最终输出的控制指令为无人机的滚转角,因此还需要进一步计算,将无人机横向加速度a转换为滚转角指令φ。无人机在倾斜转弯过程中同时受到空气的升力、横向的向心力以及自身的重力,通过受力分析可以得到自身重力与向心力之间关系为:
mgtanφ=ma
(7)
式(7)中:a为通过L1制导法求得的横向加速度;g为重力加速度。将式(2)代入式(7)中即可得到滚转角指令Φ的最终表达式为:

(8)
4.3 L1取值分析
由式(8)可以看出,滚转角指令φ的取值仅取决于无人机的速度V、无人机距虚拟目标点的直线距离L1以及夹角η。由于无人机的速度V和夹角η是根据无人机飞行过程实时计算的,因此,无人机跟踪性能很大程度上取决于L1值的选取。
L1值的选取主要考虑无人机自身的特性以及无人机的速度大小。对于不同的无人机来说,相同的控制指令可能会产生不同的效果,因此需要参考无人机自身的特性来选取合理的L1值;对于不同的飞行速度,L1值也应进行适当的调整,使得航迹跟踪效果具有稳定的精度。基于此,在对L1取值时,首先应对具体的无人机系统选定一组V和L1作为参考,再根据参考计算不同速度下的L1取值,具体计算公式为:
L1′=L1+K(V′-V)
(9)

5 仿真验证
为检验该算法的避障效果,本文在无人机跟踪的目标航线上设置了2处障碍物,并给出识别之后的障碍物的覆盖圆。仿真实验的初始条件设置如下:无人机初始位置为(0,10),初始航向角Ψ0=110°,无人机飞行速度为V=25 m/s,目标航线设置为沿X轴的直线,分别在X=300和X=600的位置设置2处障碍物,仿真结果如图9~图11所示。

图9 无人机避障航迹曲线Fig.9 UAV obstacle avoidance track chart

图10 无人机航迹偏差曲线Fig.10 UAV track deviation

图11 滚转角指令曲线Fig.11 roll angle instruction
由图9可以看出,无人机可以较好地跟踪目标航线,并且能够按照最近的路径避开预先设置的障碍物。图10展示了飞行过程中无人机与目标航线之间航迹偏差的绝对值,可以看出在没有障碍物的路径上航迹偏差几近为0。图11为无人机控制输出的滚转角指令随飞行距离的变化示意图,可以看出飞行过程中滚转角指令均控制在±30°以内,可以确保无人机飞行的安全性和可靠性。
6 结论
针对无人机在航线跟踪过程中的避障问题提出了一种新的解决方案,利用探测信息构建障碍物与无人机间的几何关系,实时给出避障路径;然后通过L1制导法将避障问题转换航线跟踪问题,使无人机对目标航线的跟踪在遇到障碍物后转变为对避障路径的跟踪,从而实现无人机避障。通过仿真验证该算法可以选择最优的路径避开目标航线上的障碍物并始终跟踪目标航线,且具有较小的倾斜转弯滚转角,更符合实际作战要求。
猜你喜欢
金属加工(冷加工)(2020年11期)2020-11-24 08:58:20
青年歌声(2019年12期)2019-12-17 06:32:32
测控技术(2018年5期)2018-12-09 09:04:24
精密制造与自动化(2018年1期)2018-04-12 07:42:50
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
设备管理与维修(2016年5期)2016-03-16 02:20:46
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09