
深海潜标布阵方式对海面声源定位精度的影响
2022-04-02 06:07:50张志伟王红萍上飞飞马少华
海洋工程 2022年2期
张志伟,王红萍,张 旭,上飞飞,马少华
(1.中国人民解放军91550部队43分队,辽宁 大连 116023;2.中国人民解放军91650部队,广东 广州 510320;3.中国人民解放军92556部队,浙江 舟山 316000)
由于深海潜标对各种环境具有良好的适应性,并且可以进行长期、定点、连续和多层面同步测量,是获取海面声源目标瞬态信号的重要手段,目前已在海洋科学调查研究、声源目标定位等方面得到非常广泛应用[1]。声源定位潜标主要基于长基线定位原理,采用到达时间差(TDOA)体制实现被动噪声目标的声学定位[2-3]。在定位过程中,声源目标定位精度与目标相对于潜标阵的几何关系密切相关。因此,在时差测量误差及站址误差一定的情况下,对潜标阵进行优化布设是提高定位精度的一种有效手段。现有基阵优化布设问题大多针对陆上、空中雷达领域或浅海工况条件下的无源定位问题[4-9],而对深远海条件下的目标定位特性与布阵方式的相关性问题关注较少。当采用多基站交会方式对海上被动声目标进行定位时,在满足最低解算条件的基础上,通过增加阵元数提高冗余度可改善定位精度。但在实际海上作业中,可增加的冗余阵元总是有限的,大规模密集布阵往往难以实施(特别是在远离岸站的深海区域)[10],在这种情况下,布阵设计和优化就成为一个重要手段。已有相关文献讨论了四边形阵、三角形阵、圆形阵等典型几何构型条件下的定位性能[11-15],但没有考虑特殊阵型条件下声源定位性能。为此,开展深海条件下的目标定位精度与布阵方式关系研究显得尤为重要。
这里以高速运动的海面声源目标入水点位置测量为工程应用背景,利用分布在海底的多个潜标组成的潜标阵作为测量手段,分析深海潜标布设方式对海面声源目标入水点定位精度的影响,主要考虑目标位于阵内、目标位于阵外以及阵元失效时定位精度分布情况。研究结果拟为海上声源目标位置测量的深远海作业提供理论依据。
1 定位解算模型
考虑深海潜标定位方式主要采用基于TDOA体制被动定位方法,通过测量待测声源与各阵元之间的到达时间差而实现定位,也称为双曲面交汇模型[16]。其基本原理如下:
假设深海潜标阵包含n个阵元,且各阵元位置坐标为XP=(xi,yi,zi)T,i=1,2,……,n,待测目标X=(x,y,z)T到达各阵元的时间测量值为ti。当采用基于TDOA的被动定位方式时,ti未知,但待测目标到各阵元间的到达时间差Δti可以测量。
(1)

在待测点附近选取的某一初始位置X0=(x0,y0,z0)T来模拟高斯—马尔科夫定理,利用泰勒级数展开法得到待测目标到达各阵元的到达时延差为:
(2)
上式可进一步改写成:
ΔT=GΔX
(3)
其中,
由最小二乘原理可得:
ΔX=(GTG)-1GTΔT
(4)
(5)

2 工况设计
以试验海域中心位置为坐标原点建立站心直角坐标系,其中Y轴正半轴指向正北,X轴正半轴指向正东,Z轴正半轴垂直于OXY平面向上为正,与X轴、Y轴构成右手坐标系,图1为声源定位示意。假设水深5 400 m,海面声源测量系统中要求海底潜标布阵区域范围为12 km×8 km,声信号作用距离等于12 km,基本覆盖整个测量区域。用潜标释放装置往海面下吊放潜标,各个潜标采用同步工作方式。潜标布放后,使用应答器定位系统对潜标进行定位,通过计算得到每个潜标在水下的精确位置。然后利用获取的观测量即时延差(两组以上)对海面随机入水目标进行定位。各误差源设计如下:阵元水平方向站址误差为27 m,垂直方向为10.8 m,等效声速起伏误差设为1.2 m/s,时延估计误差设为1 ms。图2为在试验海域选取的夏季典型声速剖面。
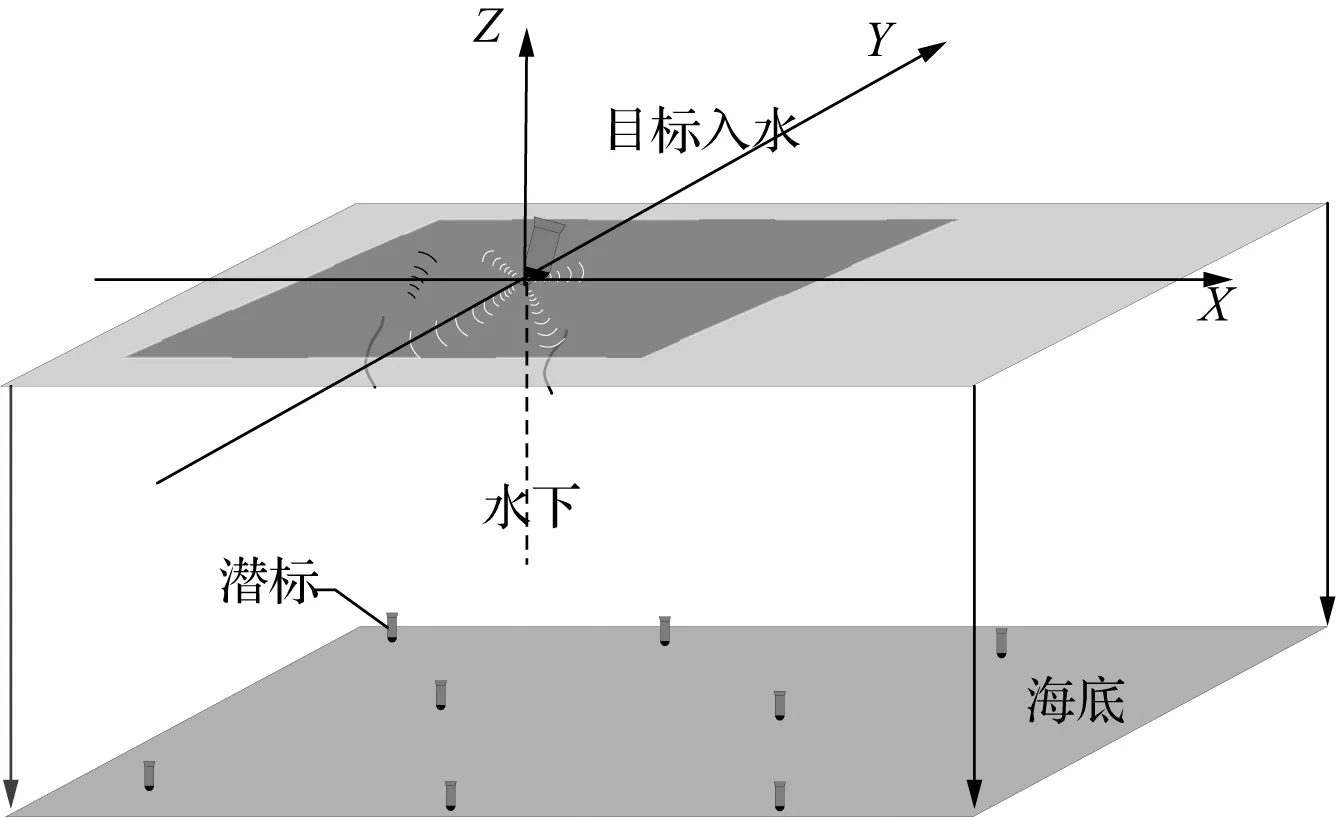
图1 海面声源定位示意
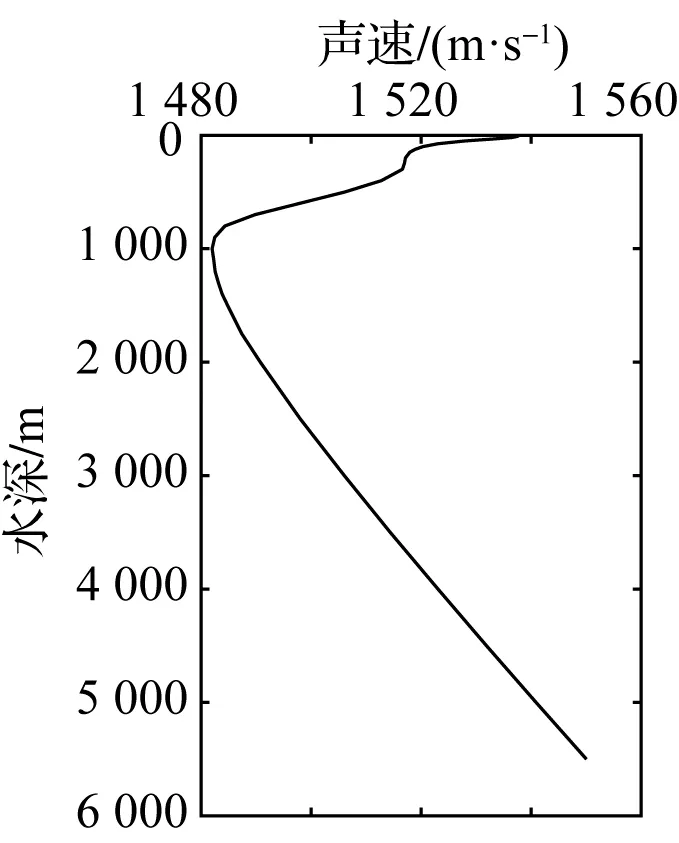
图2 试验海域夏季声速剖面
3 阵型选择
通常采用3个潜标阵元即可实现声源定位,但系统定位精度和定位性能无法保证。为了增加定位算法的冗余度,提高定位系统性能,可在系统要求的12 km×8 km测量区域4个顶角位置布设4个潜标组成长基线定位系统,如图3(a)所示,水声信号作用距离约为12 km,通过进一步计算可知,四阵元呈矩形分布时,位置可解算范围基本覆盖整个测量区域。
为了进一步提高系统定位精度,可以通过增加冗余潜标来实现。首先在长边的中心位置增加潜标,如图3(b)中5#和6#潜标,组成了两个6 km×8 km矩形基阵,这样便于检测到目标入水声信号。然后在此基础上,可在上述两个矩形阵中心位置增加两个潜标,如图3(c)中的7#和8#潜标,在中心区域组成了一个边长为5 km的菱形阵,保证了中心区域附近能够实现高精度定位。采用冗余阵元可以剔除不合理解及实现多解的加权平均,增加了信号检测概率,同时进一步提高了测量系统的定位精度。

图3 潜标阵分布情况
4 布阵方式对定位精度影响分析
结合前文建立的基于TDOA定位模型和设计的工况,在图3阵型分析的基础上,基于蒙特卡洛仿真算法从3个角度分析布阵方式对定位精度的影响,主要分析阵内、阵外及阵元失效情况下的定位精度,蒙特卡洛仿真算法步骤可参见文献[3]。
4.1 阵内定位精度分析
定位系统测量范围是根据综合考虑目标理论入水位置、测量设备安全、声信号作用范围而确定的,目标入水位置大概率会落入基阵布设范围内,因此分析不同阵型条件下,基阵内部定位精度对目标位置测量具有重要意义。图4为不同布阵方式下阵内定位精度分布情况。

图4 不同布阵方式下阵内定位精度分布情况
从图4可以看出,由于基阵对称布设,定位精度分布也呈明显对称趋势,对于四个潜标分别位于四个角的情况,声波基本覆盖整个测量区域,仅东、西两侧有较小区域未覆盖,覆盖区域内平均定位精度为34.1 m。靠近基阵顶角处定位误差较大,这是由于在定位解算过程中靠近顶点位置方程出现病态情况,定位结果不可靠。随着阵元数目的增加,冗余性增加,定位精度不断提高,尤其是中心区域附近定位精度最高,这是因为目标落入中心区域的基阵冗余性最大。
下面选取阵型内中心区域分析阵元数目增加对定位精度影响情况,可选取中心附近菱形区域,定位精度分布如图5所示。

图5 中心区域附近定位精度分布情况
其中图5(a)~5(c)中选取菱形区域分别对应图4(a)~4(c)。表1为阵型中心附近菱形区域内定位精度统计情况。从表1中可以看到,随着阵元数增加,中心附近区域定位精度变化情况。由四个阵元到六个阵元时,中心区域平均定位精度提高约7.9 m,而由六个阵元到八个阵元时,中心区域平均定位精度提高约2.4 m。

表1 区域内目标位置测量精度统计
4.2 阵外定位精度分析
由于声信号作用距离为12 km,声信号覆盖区域显然要大于系统要求的12 km×8 km测量范围。在受到一定干扰情况下,目标运动轨迹可能会发生偏移,所以目标也可能会落在测量区域外部,因此有必要考察目标落在测量区域外部时定位精度分布情况。在测量区域内至少保证同时有3个阵元接收到声信号才能解算落点位置信息。图6(a)为不同阵元数目时可解算位置区域覆盖情况。其中,不同颜色灰度表示利用不同阵元数定位区域。图中最外侧是三个阵元定位区域,由外向内定位基站数目逐渐增加,中间为八个阵元定位区域。图6(b)为基阵外部定位精度分布情况。

图6 阵外定位精度分布情况
从图6(b)可以看出,在阵型内部,定位精度较高。这是由于在阵型内部位置解算时利用的阵元数大于等于6个,增加了定位解算的冗余度,因此内部定位精度较高。在阵型外侧,随着可解算阵元数的减少,定位精度逐渐降低。在矩阵的对角线方向靠近顶角附近,基阵交汇解算性能较差,定位误差大于500 m,此时定位结果不可靠。
4.3 阵元失效情况分析
在实际工况条件下,由于受深海复杂环境影响很可能导致某个海底潜标失效,无法收到数据,因此在测量系统设计时需要考虑某个阵元失效情况下系统的定位精度。首先仅考虑1个阵元失效的情况,可分为如下三类情况进行分析。第一类情况:由于1#、2#、3#、4#阵元位置对称,因此这4个阵元其中任何一个失效,情况是一样的,不妨假设1#潜标失效。第二类情况:由于5#、6#潜标在对称位置,任何一个失效情况一样,不妨假设5#潜标失效。第三类情况:由于7#和8#潜标处于对称位置,其中任何一个阵元失效,情况是一样的,不妨假设7#潜标失效。图7为某一阵元失效时区域内目标定位精度分布情况,其中图7(a)为1#潜标失效时定位精度分布,图7(b)为5#潜标失效时定位精度分布,图7(c)为7#潜标失效时定位精度分布。表2为某一阵元失效时目标定位精度统计情况。

图7 某一阵元失效时定位精度分布

表2 阵元失效时定位精度统计情况
由图7和表2可以看出声源定位精度的分布规律,当出现第一类情况时(1#潜标失效),定位精度下降明显,尤其是测量海域西北角方向定位精度较差,误差大于50 m,平均定位精度约为33.4 m,但在此类情况下,精度优于25 m的区域要比第二类情况大;当出现第二类情况时(5#潜标失效),测量海域北侧精度略低,从全域看定位精度优于40 m,定位精度平均值约为28.07 m;当出现第三类情况时(7#潜标失效),定位精度较高,定位精度平均值约为26.5 m,此时区域定位精度与各阵元均正常的情况接近,因此7#潜标失效时对定位精度影响较小。
图8为仅子阵有效时定位精度分布情况,当图3(b)中仅6 km×8 km矩形子阵有效时,定位精度分布如图8(a)所示,定位精度优于35 m区域呈沙漏状分布,在东西两侧靠近基线附近定位精度介于35~45 m。当位于图3(c)中心附近的菱形子阵有效时,定位精度分布如图8(b)所示,中间菱形区域精度优于35 m,内侧和外侧菱形区域之间的定位精度介于35~45 m之间。

图8 仅子阵有效时定位精度分布
5 结 语
在深海大范围区域利用潜标对海面声源进行长基线定位时,由于深海环境的复杂性,潜标的布设方式将影响定位结果精度。在设定工况条件下,结合测量系统要求对阵型选取原则进行了分析,然后讨论了几种潜标布阵方式及阵元失效时对海面声源定位精度的影响。得出的主要结论如下:
1)当海底潜标呈四元矩形阵分布时,测量海区东、西两侧存在较小区域未能覆盖,此时覆盖区域内部平均定位精度约为34.1 m;
2)随着潜标数量增加,在测量中心区域附近目标定位精度显著提高,阵型外侧定位精度由内向外逐渐下降。当目标位于对角线方向靠近顶角附近时,模型交汇解算性能较差,定位精度大于500 m,此时定位结果不可靠;
3)当利用8个潜标定位时,若1#潜标失效,测量海域西北角方向定位精度较差,但精度优于25 m的区域要比5#潜标失效情况大。7#潜标失效时,定位精度与各阵元均正常的情况接近,因此7#潜标失效时对定位精度影响较小。
上述研究结果为深海声源位置测量相关工程应用提供技术和理论支撑。文中仅讨论了几种典型布阵下定位精度分布情况,对于不规则阵型条件下以及不同声速条件下的基阵优化设计问题则需要深入进一步研究。
猜你喜欢
科教新报(2024年2期)2024-03-17 09:48:23
中国畜禽种业(2022年8期)2022-09-17 03:29:14
动漫界·幼教365(中班)(2021年3期)2021-04-06 14:25:32
小哥白尼(神奇星球)(2020年5期)2021-01-18 05:02:38
能源(2018年8期)2018-09-21 07:57:22
小雪花·成长指南(2017年4期)2017-06-12 21:32:35
小雪花·成长指南(2017年5期)2017-06-07 08:26:49
冰雪运动(2016年5期)2016-04-16 05:55:13
海洋科学(2014年12期)2014-12-15 03:35:04
声学技术(2014年2期)2014-06-21 06:59:04
